Modeling
The present section describes the modeling of the magnetically suspended flywheel.
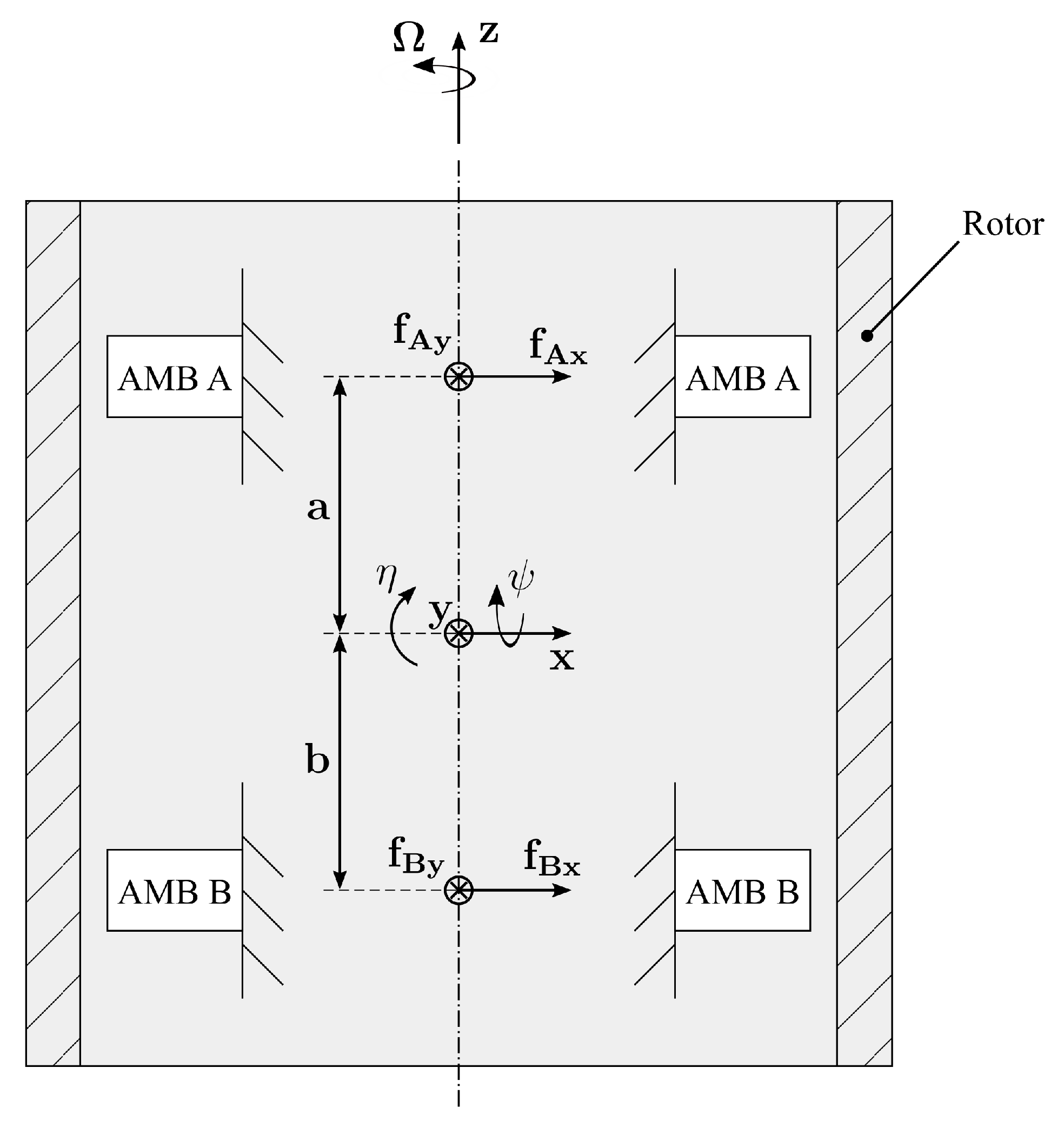
Figure 7 shows a schematic of the rigid rotor on AMBs.
The dynamics of the rigid rotor on AMBs at constant spin speed [
3,
34] is governed by
where
m,
and
are the rotor mass, transversal moment of inertia and polar moment of inertia, respectively, and
t is the simulation time.
and
are the static and couple unbalance, which are computed in accordance with the standards reported in [
34] (the quality grade suggested for flywheels is G 6.3). The values of these parameters are reported in
Table 4.
The vector
contains the generalized coordinates of the rotordynamics (
x and
y are the translational degrees of freedom,
and
are the rotational ones, as illustrated in
Figure 7), and
is the vector of the external forces acting on the rotor:
where
and
are the coordinates of the radial AMBs with respect to the origin of the
-reference frame.
is the vector of the external disturbances acting on the flywheel. The vector
contains the forces provided by the AMBs, where
is the force of the AMB
i along the
j-axis. Two counteracting electromagnets, driven in the differential driving mode [
3], are employed along each axis of the AMB. By considering the
j-axis of the AMB
i,
and
are defined as the forces provided by the electromagnets supplied with the currents
and
, respectively, where
is the bias current and
is the control current at the
j-axis of the AMB
i. The latter is determined by the PD controller, which receives as input the displacement of the flywheel at the AMB location [
3]. The parameters of the PD controller are reported in
Table 5.
The force
is computed as
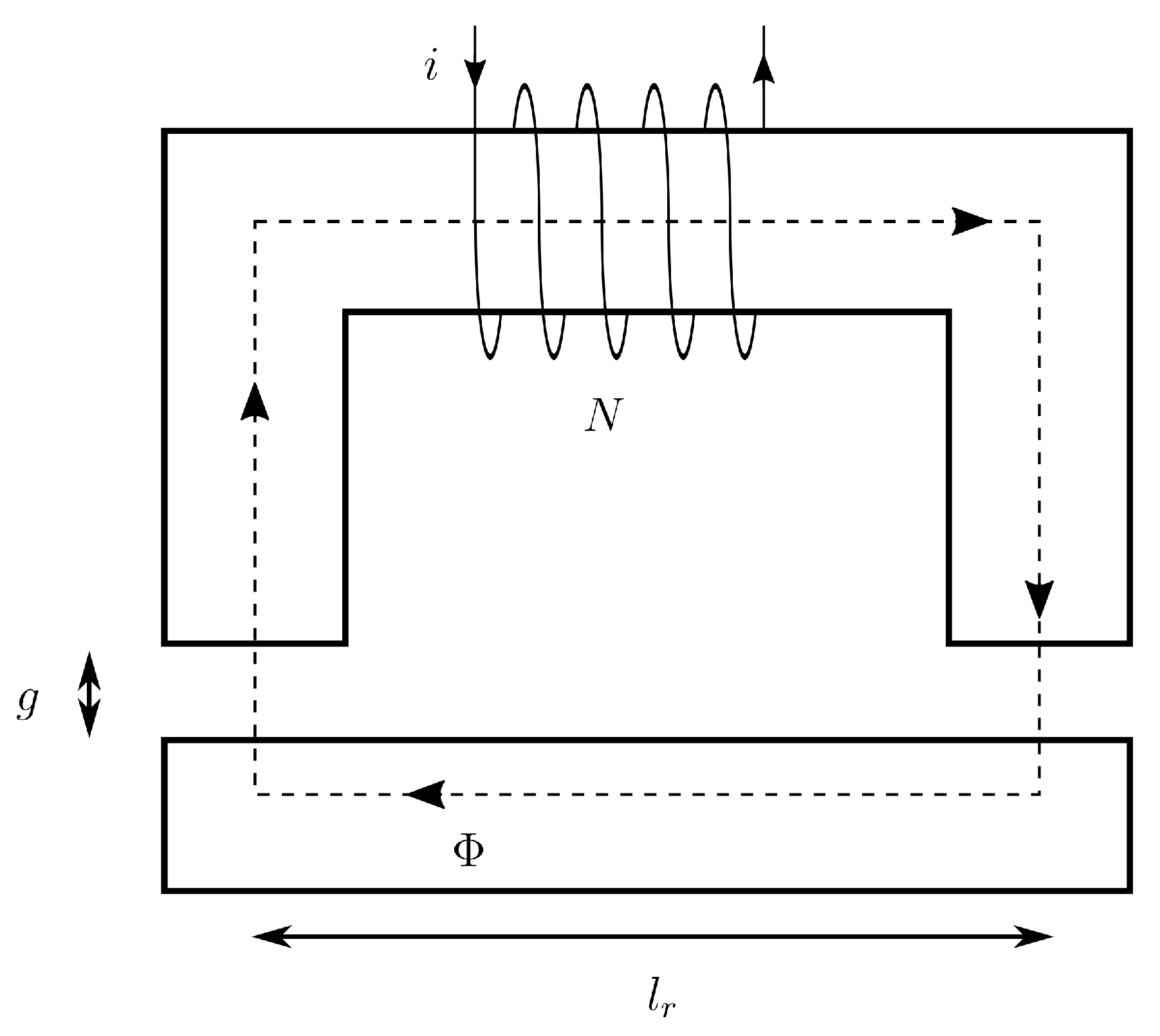
A one-dimensional approach is used to achieve the force
produced by the electromagnet. The magnetic circuit of the electromagnet is sketched in
Figure 8, where
is the length of the magnetic flux path in the rotor and
g is the magnetic gap. The current
i flows into the coil and forces the magnetic flux
, which is constant if flux leakages are neglected, in the magnetic circuit.
Ampère’s law can be applied to the circuit:
where
is the length of the flux path in the stator,
N is the number of turns of the coil and
H is the magnetic field strength (the subscript
s refers to the stator,
g to the magnetic gap,
r to the rotor). The core of the electromagnet is made of laminated silicon steel, whose magnetic behavior can be approximated linearly. By introducing the linear magnetic characteristics of soft-iron and free-space, Equation (
15) gives
where
and
are the cross-sectional areas of stator and magnetic gap, respectively,
is the permeability of free-space and
is the relative permeability of silicon steel. The latter is significantly larger than the permeability of the free space, therefore the term referring to the stator can be neglected. If the cross-sectional areas along the flux path do not change, the magnetic flux density
B is constant (
=
=
=
B) and Equation (
16) gives
It is the load curve of the rotor material, which is a negative slope line in the B-H diagram whose distance from the origin mainly depends on the current supplied to the coil. The operating point of the rotor material yields from the intersection between the load curve and the magnetic characteristic of the rotor material. The procedure is similar to that adopted for the operating point of a permanent magnet [
41]. In the present case, the demagnetization line of the permanent magnet is substituted by the magnetic characteristic of the rotor material. The latter exhibits a magnetic hysteretic behavior, which is represented through the Jiles–Atherton model [
42,
43]. The magnetic constitutive relation of the rotor material is
where the magnetization
is obtained from the first order differential equation of the Jiles–Atherton model
The parameter
c describes the magnetization reversibility and
k is the pinning coefficient.
is the anhysteretic magnetization, and
is the effective magnetic field
where
represents the interdomain coupling. The anhysteretic magnetization
is expressed through the Langevin function
The parameters needed to represent magnetic characteristic of the FeCrCo 48/5 (
Table 6) have been identified by means of the least-squares optimization method proposed by Kis and Iványi [
44]. The identification has been based on the material hysteresis loop measured on FeCrCo 48/5 SHMM samples by means of a vibrating-sample magnetometer (VSM).
Figure 9 shows the comparison between the experimental and the numerical hysteresis loop. Equation (
19) requires the initial condition of the magnetization
, which is computed through the constitutive relation (Equation (
18)) by providing the initial magnetic field
and the initial magnetic field density
. Therefore, the magnetic characteristic of the rotor material can be written as
The intersection between Equations (
17) and (
22) is solved numerically at each step time of the simulation and gives the operating point of the rotor material (
). Note that the numerical implementation of the model requires that the initial condition of Equation (
22) at the step time
n is the operating point of the rotor material at the preceding step time (
). The force that the electromagnet generates yields from the Maxwell stress tensor [
41]. The one-dimensional approach considers a constant flux density across the magnetic gap, hence the Maxwell stress tensor gives
The force
is computed for both the counteracting electromagnets and then it is introduced into Equation (
14) to achieve the force that the AMB generates along the considered direction.
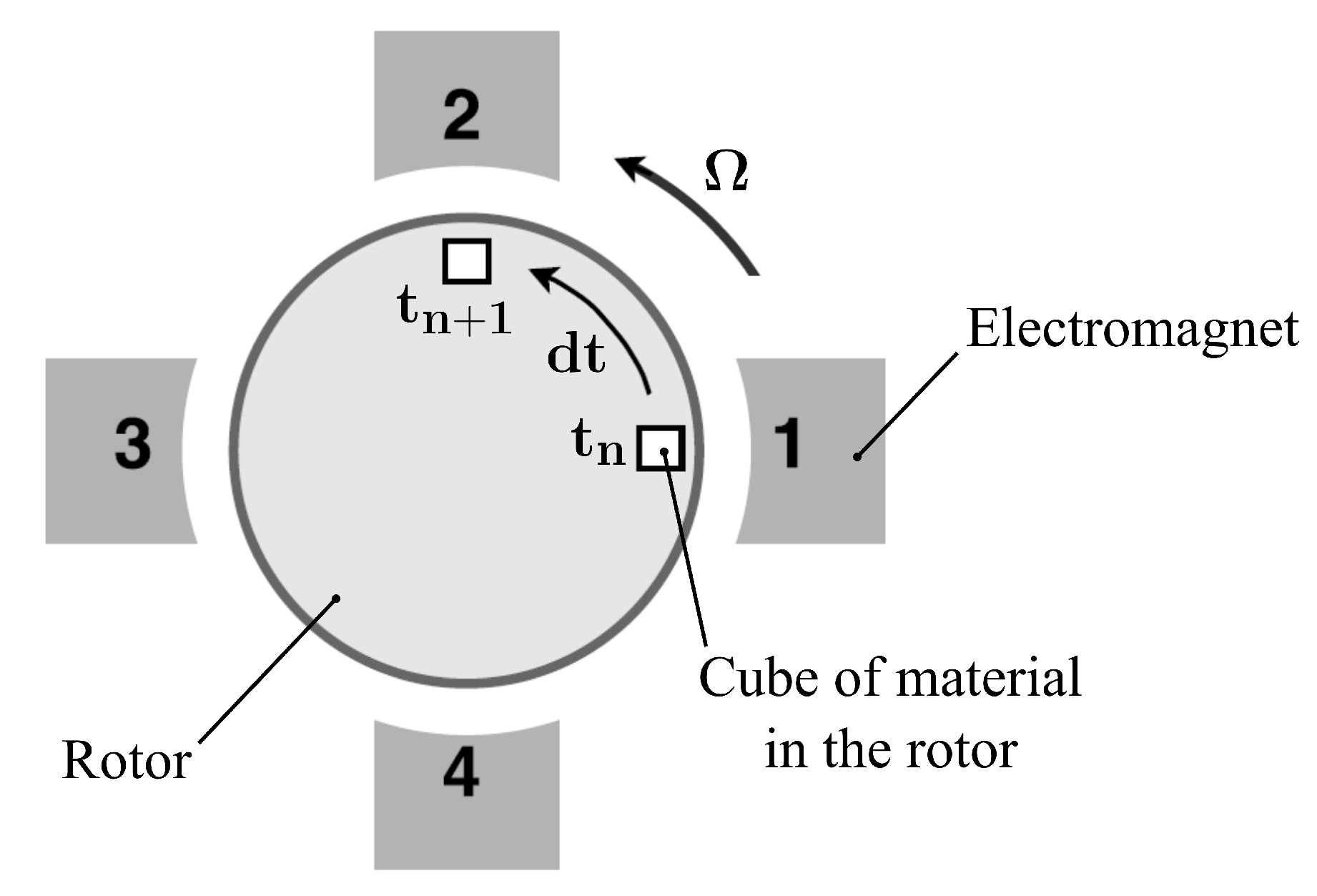
In the case of the spinning flywheel, the model needs to be modified to consider the residual magnetization effect of the hysteresis phenomenon.
Figure 10 displays a sketch of a generic rotor with the four electromagnets of the AMB. A small cube of material is highlighted. At the time
, it interacts with Electromagnet 1 and, consequently, the material operating point is
. When the rotor rotates, the cube of material leaves the electromagnet 1 but keeps its magnetization. As soon as it approaches the region of Electromagnet 2, its operating point will depend on the operating point at the previous electromagnet. The modeling approach considers that the step time
is one quarter of the rotational period. Therefore, it is the time that the cube of material needs to move from one electromagnet to the next. Furthermore, the operating point of the rotor material is assumed not to change in between the two electromagnets. This is implemented by providing the proper initial condition at Equation (
22). By considering Electromagnet
k at the time
, the initial condition to be provided is the operating point
of the preceding Electromagnet
at the previous step time
.

 ,
, 

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}