1. Introduction
The task of designing or improving a robotic hand (to replicate the grasping capabilities and the kinematic functionality of the human hand) involves the consideration of high-complexity sensory and motor functions. The literature (e.g., [
1]) shows that some robotic hands designed for research purposes have provided solutions for the domain of prosthesis. However, the actual state of the art shows that the requirements of dexterous manipulation—regarding mechanisms, actuation, and kinematic properties—have not been fulfilled [
2]. One important consideration for developing actuation mechanisms concerns the actuation level, robotic hands present in the current state of the art could be classified mainly into three categories (see
Table 1):
Under-actuated;
Fully actuated;
Over-actuated.
Type of actuation is based on the number of actuators used to drive a joint. For instance, a robot having three rotational joints, each one provided with one degree of freedom, could be driven by three actuators (one per joint)—in that case, the robot is fully-actuated. When the number of actuators is bigger than the number of joints, the robot is over-actuated. Finally, when the number of actuators is lower than the number of joints, two or more joints must be driven by only one actuator, that case is the under-actuated scenario.
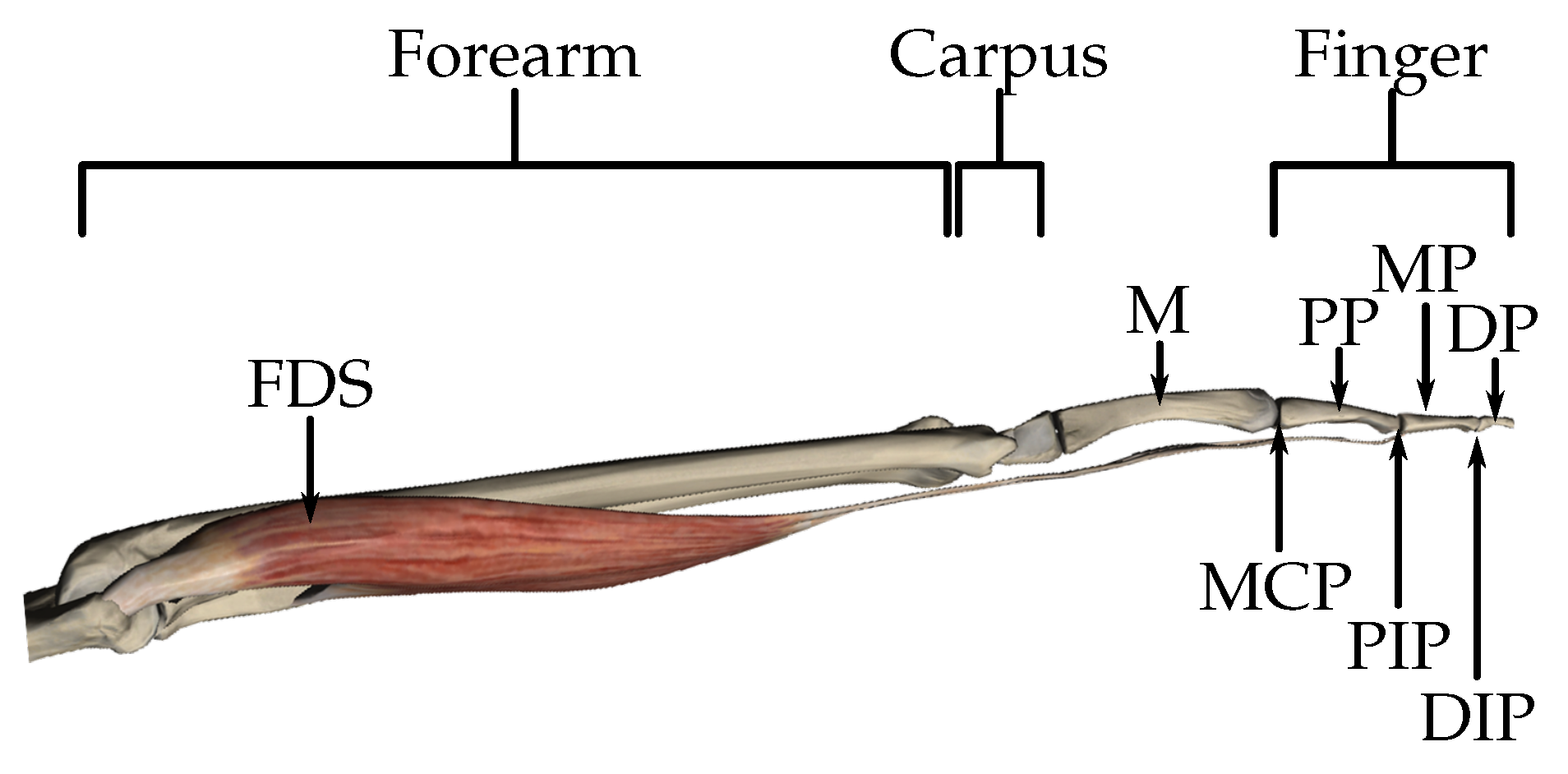
Regarding functional requirements, Ramirez Arias [
22] proposes a study of three critical aspects of the human hand: The kinematics, the functionality, and the dynamics. Concluding that for the development of a prosthetic hand, each finger must achieve the following:
Have an active flexion in the range of
in the MCP, PIP, and DIP joints (see
Figure 1) of the finger;
Perform force in the interval NN];
Achieve operating frequency in the interval HzHz];
Propose an actuation system based on viscoelastic behavior of human muscle.
Concerning the definition of criteria to qualify the muscle’s behavior, Hill’s mechanical equivalent models are more suitable due to the use of equivalences between biological and mechanical elements. Classical Hill’s model was established by Hill [
23], and consists of an arrangement of elastic elements that are used as descriptors of the muscle’s elastic behavior.
Figure 2 shows the Equivalent model, based on the description given by Hill [
24].
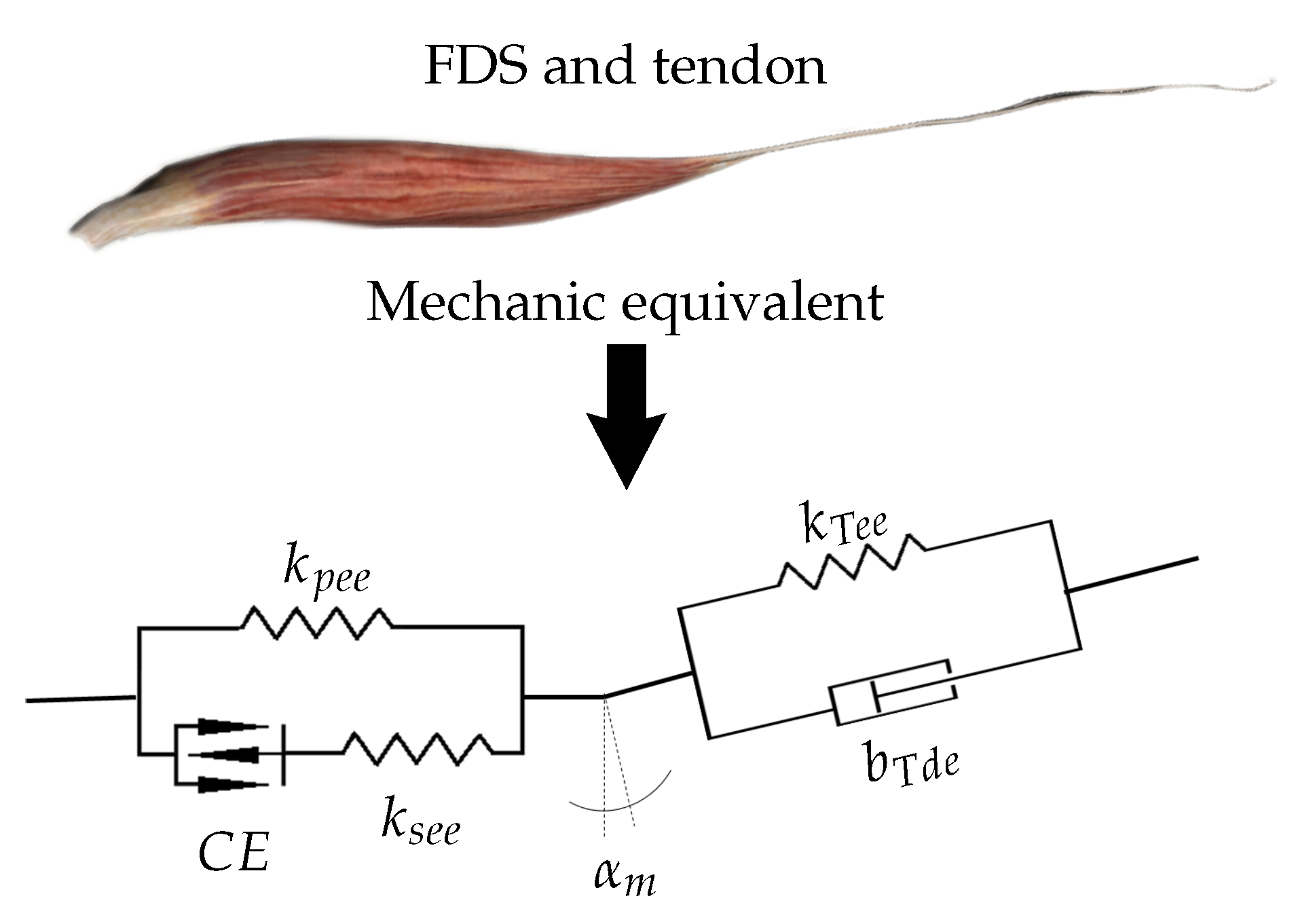
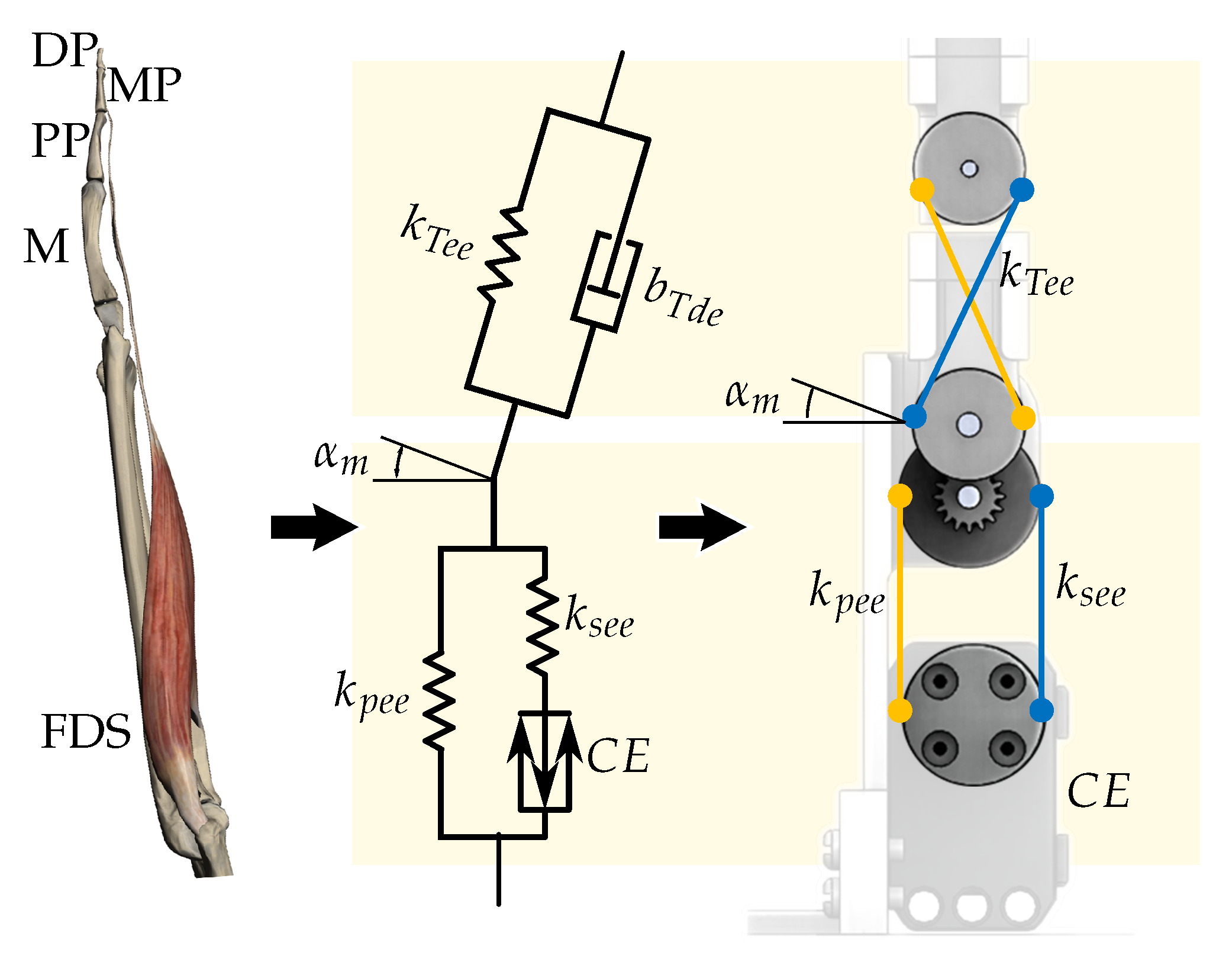
Over the years, several variations of the Hill model have been proposed, adding mechanical elements and considerations to qualify the muscle’s behavior. In this paper, we choose the model proposed by Ramirez Arias [
22], which mainly considers two significant variations with respect to classical models: The pennation angle
, which influences the kinematics and the force during movements; and a parallel damper-spring element, representing the tendon to describe the muscle behavior accurately. The complete model, presented in
Figure 3, is composed by:
, the contractile element;
, the parallel elastic element of the muscle;
, the muscle’s serial elastic element;
, the tendon’s elastic element;
, the tendon’s damping element;
, the pennation angle.
A classic actuation system and a drive mechanism can easily fulfill motion, force, and frequency requirements. However, a rigid device is not able to mimic the required viscoelastic behavior. Consequently, the first constraint for developing an appropriate mechanism is the inclusion of soft materials in the machinery design [
25], merging the usage novel fabrication technologies as 3D printing [
26,
27], which can also lead to the development of soft robots.
Therefore, in this paper, we introduce the design of a biomimetic driving mechanism, aiming to reproduce the viscoelastic behavior of the human muscle, meanwhile satisfying kinematic, dynamic, and static requirements. The device considers the operating principle of the epicyclical mechanism merged with elastic elements.
2. Soft Epicyclical Mechanism
According to state of the art, developed by Ramirez Arias [
22]:
The most used drive mechanism is based on tendons;
The mass of a prosthetic hand must be under 600 g;
The number of actuators must be reduced, but the number of the degree of freedom (DoF) must be as high as necessary to perform the prehension;
An electric actuator is a right approach, but needs to be complemented with soft elements to achieve the desired behavior.
In the following, we introduce the prototype of the so-called robotic finger ProMain-I, which uses a new tendon-driven mechanism (to provide flexibility in the articular joints) and takes into account human hand requirements.
The adduction–abduction of metacarpophalangeal (MCP) joints play an essential role in preparing the hand for grasping. Moreover, the finger’s flexion–extension movements are more significant to perform the hand grasping gesture. Consequently, if the fingers are correctly placed for grasping, adduction–abduction of MCP joints are not required, and the prosthesis can be simplified without impacting prehension ability. Thus, the proposed finger prototype is only endowed with flexion and extension on metacarpophalangeal (MCP), Proximal Interphalangeal (PIP), and Distal Interphalangeal (DIP) joints.
In order to develop the tendon-based ProMain-I finger, an early “alpha” prototype of the robotic finger is introduced. The “alpha” finger prototype is a bio-inspired tendon-driven finger [
28,
29,
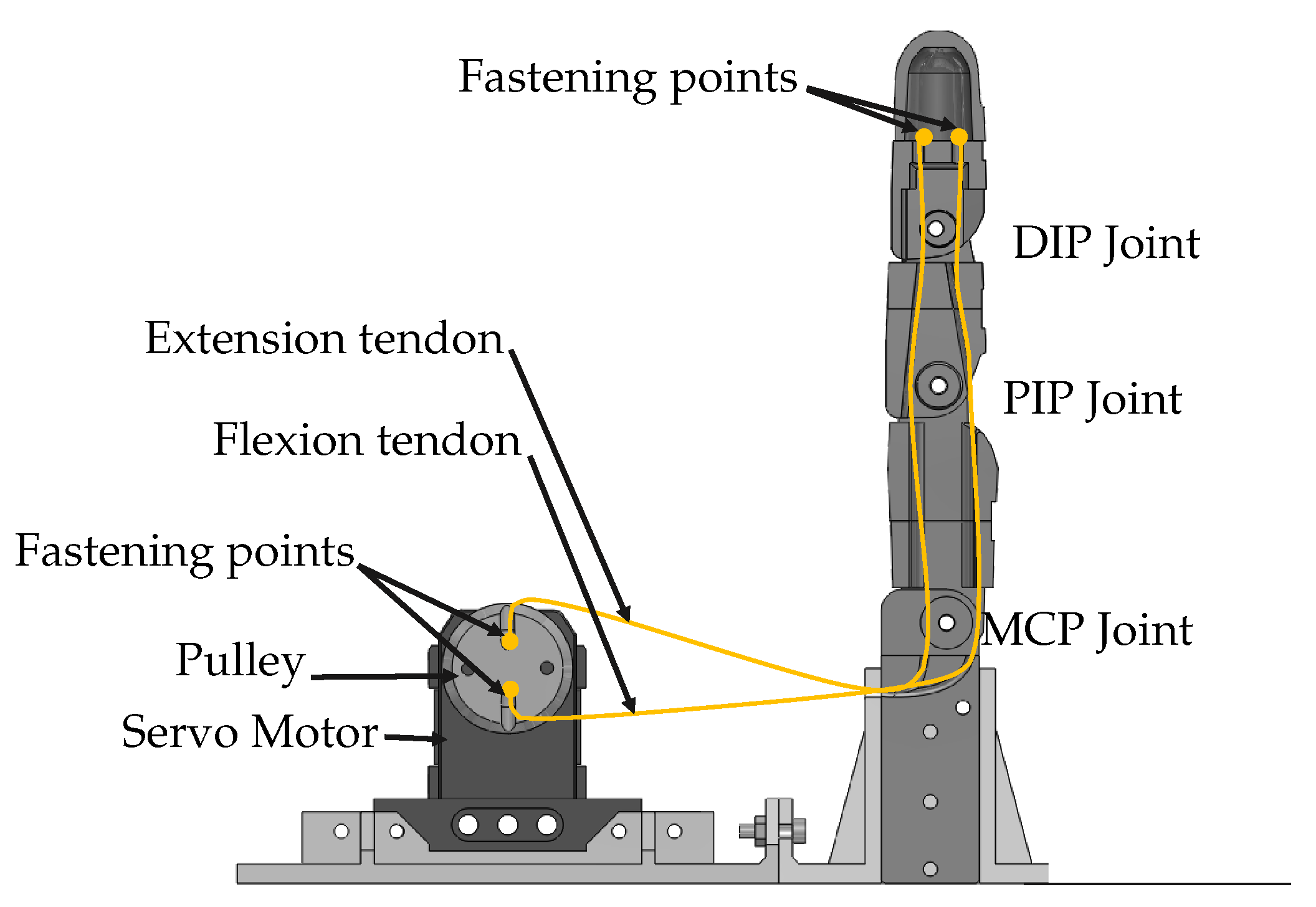
30] composed of three joints: The metacarpophalangeal (MCP), the proximal interphalangeal (PIP), and the distal interphalangeal (DIP). All the joints have one DoF to perform flexion and extension. The finger is controlled by only one actuator, and the drive mechanism uses two tendons for transmitting motion, one for the flexion and one for the extension, as shown in
Figure 4. Considering that the tendons are fastened to the motor pulley and the fingertip, the clockwise rotation of the actuator produces the flexion; and the counterclockwise rotation provides the extension.
The finger is endowed with two tendons, each one directly fastened to the input pulley and the fingertip (see
Figure 5). Consequently, the main drawback of the alpha prototype was the inability to handle sub-actuation relations by changing pulleys ratios. Moreover, the finger movement was dominated by external conditions and experiments had a low degree of repeatability. Nevertheless, due to the under-actuation, the rotation angle of the PIP and DIP joints are linked with the rotation angle of the MCP joint.
The relations between joint angles are calculated using experimental measures [
29]. As a result, the obtained relations between angles are
and
, where
is the MCP joint angle,
is the PIP joint angle, and
is the DIP joint angle. Furthermore, the parameters
,
, and
are the lengths of the proximal, medial, and distal phalanges, respectively, as shown in
Figure 5.
The analysis carried out using experimental data, issued from the “alpha” prototype of the robotic finger, gives us valuable and relevant information for the improvement of the finger’s mechanism and actuation systems and lets us define the following functional requirements [
29,
30]:
Higher stiffness into the MCP joints;
A fixed mechanical relation between the proximal and metacarpal joints, and between the distal and metacarpal joints.
Those improvements are introduced in the ProMain-I finger prototype.
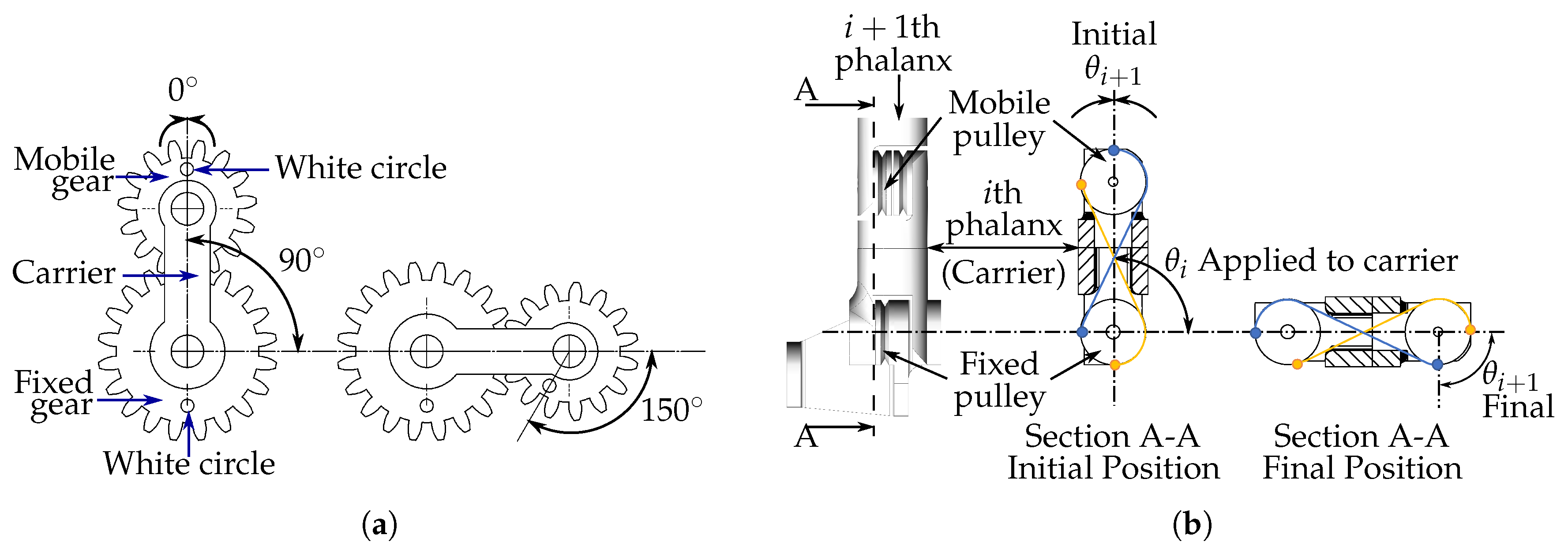
The new driving mechanism is inspired by the epicyclical gear train, which is typically composed of two gears (one fixed and one mobile) whose centers are attached through a rigid link so-called carrier. The rotation of the carrier then creates a revolve of the mobile gear center around the fixed gear. As a result, due to the mechanical link between gears, a rotation is provided on the mobile gear. Furthermore, the rotation amount of the carrier can be different from the rotations of the mobile gear, which is controlled by the gears relation.
Figure 6a exemplary shows an epicyclical gear train (whose gears are labeled with white circles to follow relative rotations) in which the carrier has rotate
and the mobile gear
.
Consequently, for our driving mechanism, we proposed a soft epicyclical mechanism in which:
The finger’s phalanges replace the carrier;
The gears are replaced by two slotted pulleys;
The mechanical link is guaranteed by two crossed flexible wires, henceforth, tendons.
Figure 6b shows the scheme of the driven mechanism, in which blue line represents the tendon that drives clockwise rotation; and the yellow line depicts the tendon used to produce counterclockwise rotation—clockwise and counterclockwise rotations are assumed regarding the figure orientation. The
i-th phalange of the finger begins in a vertical position, then, after a rotation, it reaches a horizontal position. The center of the mobile pulley orbits around the fixed pulley, and due to the effect of the tendons, the mobile pulley rotates. As a result, a rotation is produced in the (
)-th phalange, which is fixed to the mobile pulley. If the mobile pulley gets blocked during rotation, the driving tendon is constrained in tension, so that the elasticity of the tendon’s material depicts the stiffness of the joint.
The proposed soft epicyclical mechanism is used to transmit motion between the MCP joint and the PIP joint, and between the PIP joint and the DIP joint. As a result, two groups of tendons are used—each group is composed of one flexion tendon and one extension tendon. Thus, Promain-I finger motion consists in the flexion and extension. Tendons are fabricated in 0.3 mm diameter fibers of Nylon 6, which, by Young’s modulus, is 2.4 GPa. During the assembly of the prototype, tendons are fastened to pulleys in such a way that pre-tension is 95 Mpa, with a maximal base strain of 4%.
From a qualitative point of view, the elastic behavior of those elements allows us to mimic human muscle behavior. Furthermore, the same effect is used to reproduce the elastic behavior of human tendons presented in
Section 1.
The damping element
, introduced in
Section 1, is used to describe more accurately the muscle behavior, avoiding undesired oscillations. In this case, considering that no oscillation is present, we consider that the element is embedded in the global behavior of the soft epicyclical mechanism. The following
Figure 7 shows the equivalence between the proposed mechanism and the Hills-based muscle model.
Following anthropomorphic requirements, the bio-inspired robotic finger ProMain-I [
31] finger prototype is composed of three phalanges (proximal, medial, and distal)—which are linked through Metacarpophalangeal (MCP), Proximal interphalangeal (PIP), and distal interphalangeal (DIP)—all joints have one degree of freedom (DoF) to perform flexion and extension. Nevertheless, the angle relationship of the finger’s joints is settled by pulleys ratio. The finger is controlled by only one servo motor, an XL-320 Dynamixell ™. Hence, the medial (MP) and distal (DP) phalanges are driven by the proximal phalanx (PP) motion. The clockwise rotation of the actuator produces flexion; and the counterclockwise provides extension. The relation between the angles is
, where
is the MCP joint angle,
is the PIP joint angle, and
is the DIP joint angle. This relation between angles is established, manipulating the pulleys ratios, and is chosen to mimic the closure of the human hand—when the input angle reaches
, the finger performs complete flexion. The ratio between length of phalanges is not required, and each length can be defined separately. In our case, we have chosen length trying to mimic human anthropomorphize.
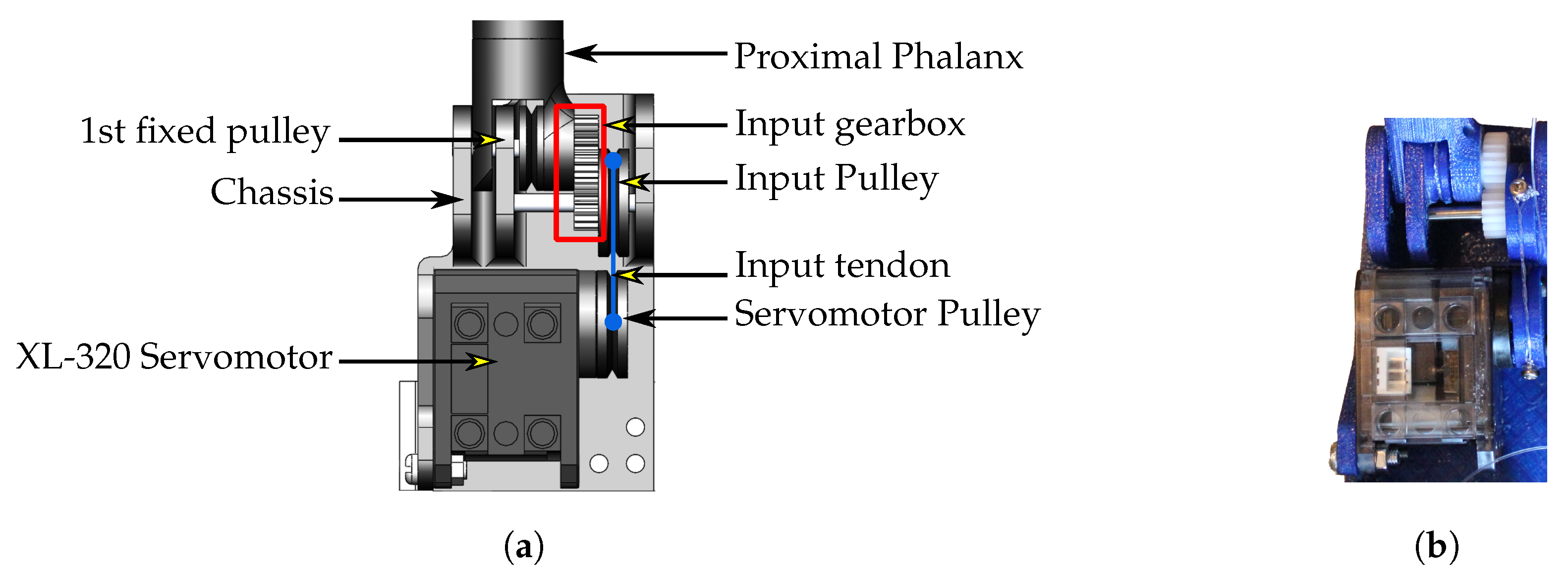
Chassis, pulleys, and kinematic links (phalanges) of the finger prototype are manufactured from polylactic acid (PLA), using a 3D printer. In the following, we describe the assembly process. The robotic finger is under-actuated, hence, the movement is transmitted using only one servomotor, which is the active element and is linked to the MCP joint, see
Figure 8. The XL-320 servomotor is linked to the proximal phalanx through the servomotor and input pulleys, which are connected by a tendon. The input pulley is directly attached to the PP using a gearbox composed of two gears (modulus 1) of 16 and 20 teeth, respectively. Likewise, the 1st fixed pulley is attached to chassis and is used as movement reference for the MP, in which PP is used as the carrier.
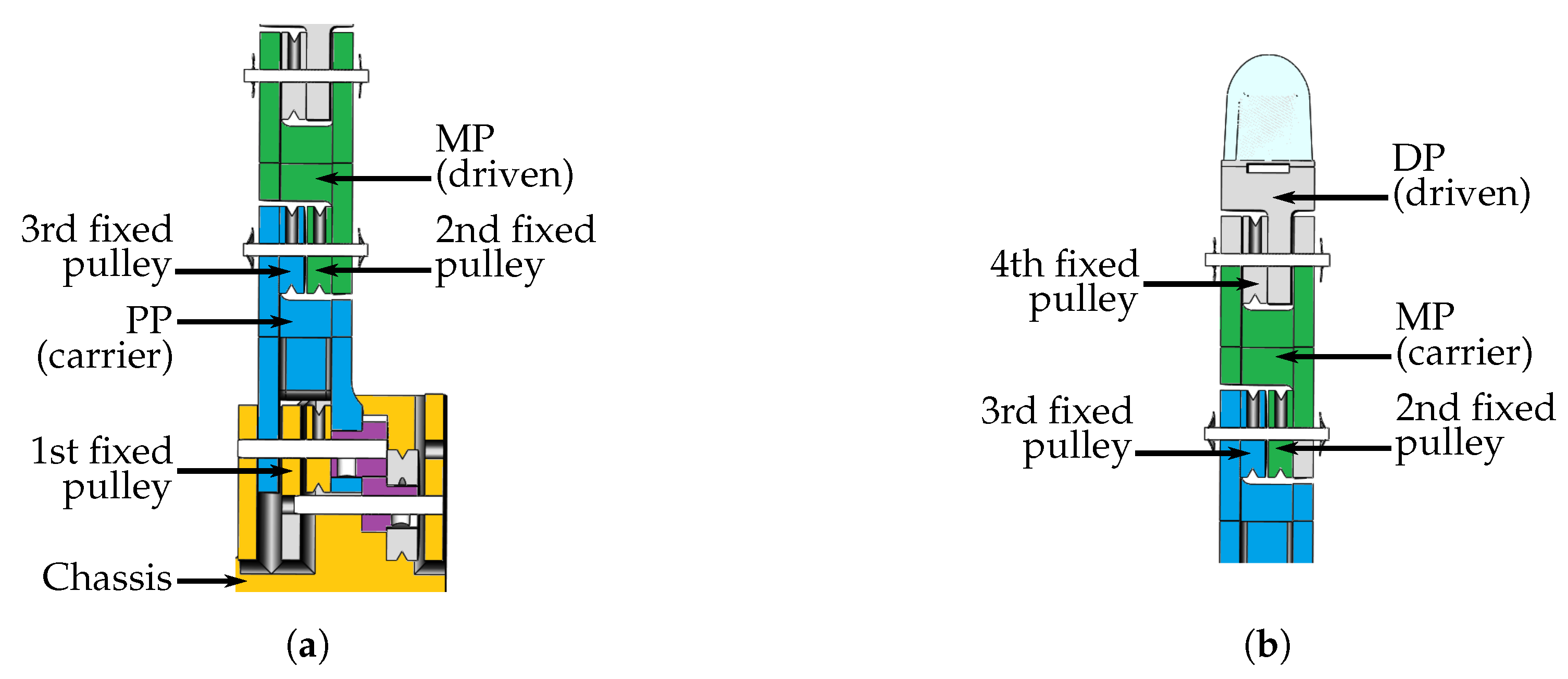
The 1st fixed pulley (attached to chassis) is linked to the 2nd fixed pulley (attached to MP phalanx) through two tendons, and functions as movement reference for the epicyclical mechanism that drives MP phalanx (see
Figure 9a). In this part of the finger, PP behaves as the carrier and MP as the driver. Likewise, the 3rd fixed pulley (attached to PP phalanx) is linked to the 4th fixed pulley through another set of two tendons, and acts as movement reference for the epicyclical mechanism that drives DP phalanx (see
Figure 9b). In this second epicyclical mechanism, MP behaves as the carrier and DP as the driver.
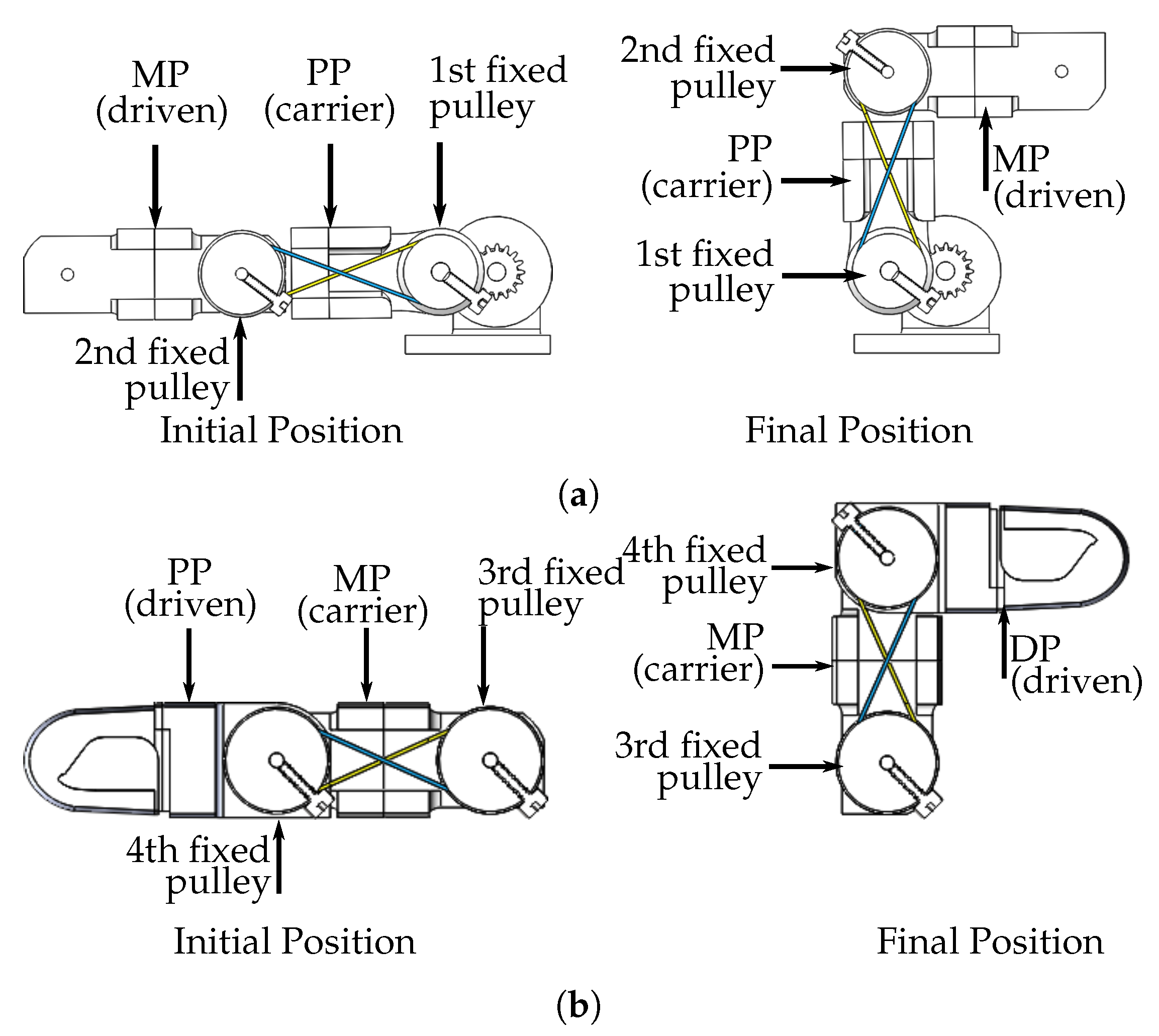
As can be seen in
Figure 10a, the first epicyclical mechanism (composed by 1st and 2nd fixed pulleys, and the carrier PP) drives MP phalanx from an initial position, in which the finger is straight, until a final position in which angle between PP and MP phalanges is 90
. Similarly, the second epicyclical mechanism (composed by 3rd and 4th fixed pulleys, and the carrier MP) drives DP phalanx from an initial position, in which the finger angle between MP and DP is 180
, until a final position in which angle between PP and MP phalanges is 90
, see
Figure 10b.
The final prototype of the ProMain-I finger is endowed of three degrees of freedom, which are all driven only by the soft epicyclical mechanism. Concerning the dimensions of the prototype,
Figure 11 shows the phalanges’ lengths. Likewise, it is essential to note that one unique aspect of soft actuators is the involvement of intrinsic passive mechanical dynamics [
32], in our case this feature is accomplished by the addition of elastic links in joints, which comes from the equivalence between our actuation system and the human muscle. Considering that in our mechanism, all elastic materials used in joins have the same characteristics, constants
,
, and
have the same value, which corresponds to the young modulus of the Nylon 6 (2.4 GPa).
3. Materials and Methods
Considering that the finger prototypes are designed to perform flexion and extension in two dimensions, the kinematic is measured using a camera (Canon EOS 600D) pointing at a single-finger platform, shown in
Figure 12, to track circular markers placed in finger joints and fingertip. The camera is positioned at 1 m from the finger prototype, and is adjusted to assure a pixel size of
mm
. The position accuracy (measured comparing several static images with a known value of length) is
mm.
Images coming from the camera are processed to automatically recognize circular markers. The image analysis follows these five main steps (see
Supplementary Materials):
Crop image to extract the finger working area, see
Figure 13a;
Transform image into a gray scale, see
Figure 13b;
Shift image into a black and white scale, see
Figure 13c;
Apply Hough transform [
33] to find the circles positions in the image, see
Figure 13e.
The image analysis delivers the position vectors of the joints, i.e., the vectors
for the MCP joint of the finger,
j,
for the PIP joint, and
for the DIP joint. Likewise, the vectors
correspond to the fingertip positions. Considering that the movement is performed in the
-plane,
is always zero. The angles are measured, as shown in
Figure 14, following the DHKK parameterization. DHKK parameters are defined to parameterize direct and inverse kinematics of robots composed of kinematic chains. The parameters can be described as follows [
28]:
A rotation around ;
A translation along ;
A rotation around ;
A translation along .
Formulation of direct kinematic is carried out merging DKKK parameters in the homogeneous matrix described in Equation (
1), which formulates transformations between
i-th and
-th joints. Moreover, the kinematic of a robot composed of
n joints is as presented in Equation (
2). As a result, the matrix
is a composition of the orientation of the end effector
, and the position vector
, as shown in Equation (
3).
Thereafter, the following three vectors linking joints are defined:
Vector between the MCP and PIP joints;
Vector between the PIP and DIP joints;
Vector between the DIP joint and fingertip.
These vectors are used to calculate rotation angles as
The first angle
is calculated with respect to a reference positive vertical unitary vector
—
Figure 15 shows the vectors
, the joints and fingertip position, and the location of
.
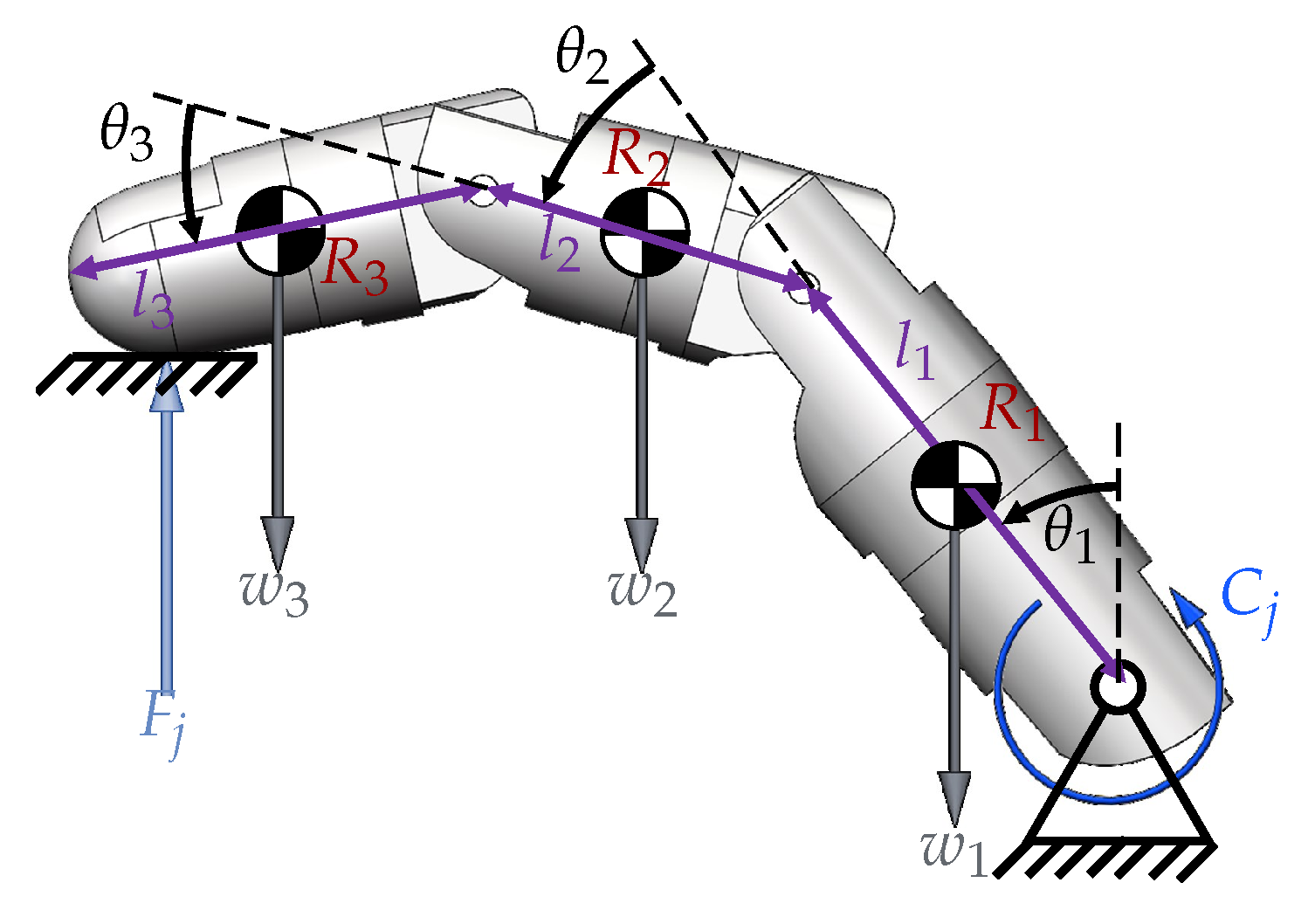
The proposed dynamic model uses the principle of virtual displacements and virtual work [
29]. The equivalent dynamic model of the finger is shown in
Figure 16, where
,
, and
are, respectively, the weights of the proximal, medial, and distal phalanges, and are placed at the coordinates of the centers of mass
,
, and
.
is the applied force, which is equivalent to the reaction force, and
is the input torque.
The virtual work is calculated for (1) the external forces (i.e., weight, applied force, and input torque) , where is the transposed external force vector and is the virtual displacement vector of the center of masses; and (2) the external forces contact point and the inertial forces (e.g., centrifugal forces) , where is the diagonal mass matrix composed of the masses and inertias , is the second derivative with respect to time of the coordinates vector representing the acceleration vector, and is the virtual displacement vector of the inertial frameworks.
The dynamic equilibrium is given by Equation (
5), but, as in our model, the rigid bodies have movement restrictions and the displacements in the points where forces are applied aren’t independent—so, to solve the equilibrium equation it is necessary to separate the coordinates into dependent and independent coordinates.
In order to solve the equilibrium equation, considering the movement restrictions, it is necessary to separate dependent and independent coordinates. The separation is performed using the transformation proposed as
where
is the Jacobian of dependent coordinates,
is the Jacobian of independent coordinates,
is the virtual displacement vector of the independent coordinates, and
is the identity matrix. The equilibrium is thus written as follows:
Solving Equation (
7), we obtain the input torque
as a function of the force
and the kinematic variables
. The resulting expression is:
where
;
;
;
;
;
;
;
;
.
4. Discussion
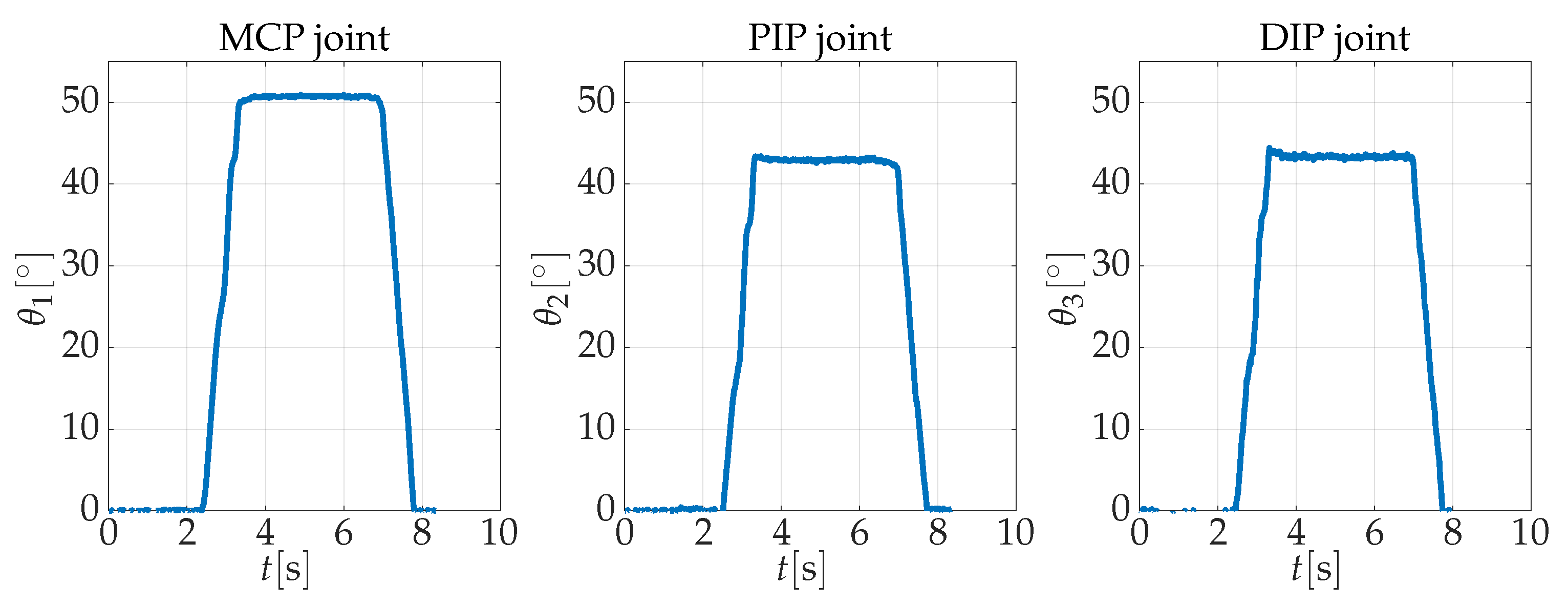
The experiment carried out with the ProMain-I finger aims to compare the expected rotation relations fixed in the soft epicyclical mechanism and the measured ones to verify the behavior of the finger. We follow the same experimental protocol introduced in
Section 3. The calculated PIP and DIP joint angles, see
Figure 17, shows an under-damped behavior for the PIP and the DIP joints when the finger gets in contact with the platform. This under-damped behavior was expected, considering that the actuation and driving mechanism is not endowed with the damper element. To evaluate the mean absolute error of the PIP and DIP joint angles, we compare the angle value obtained from the kinematic measure with the calculated angle value issued from the relation
.
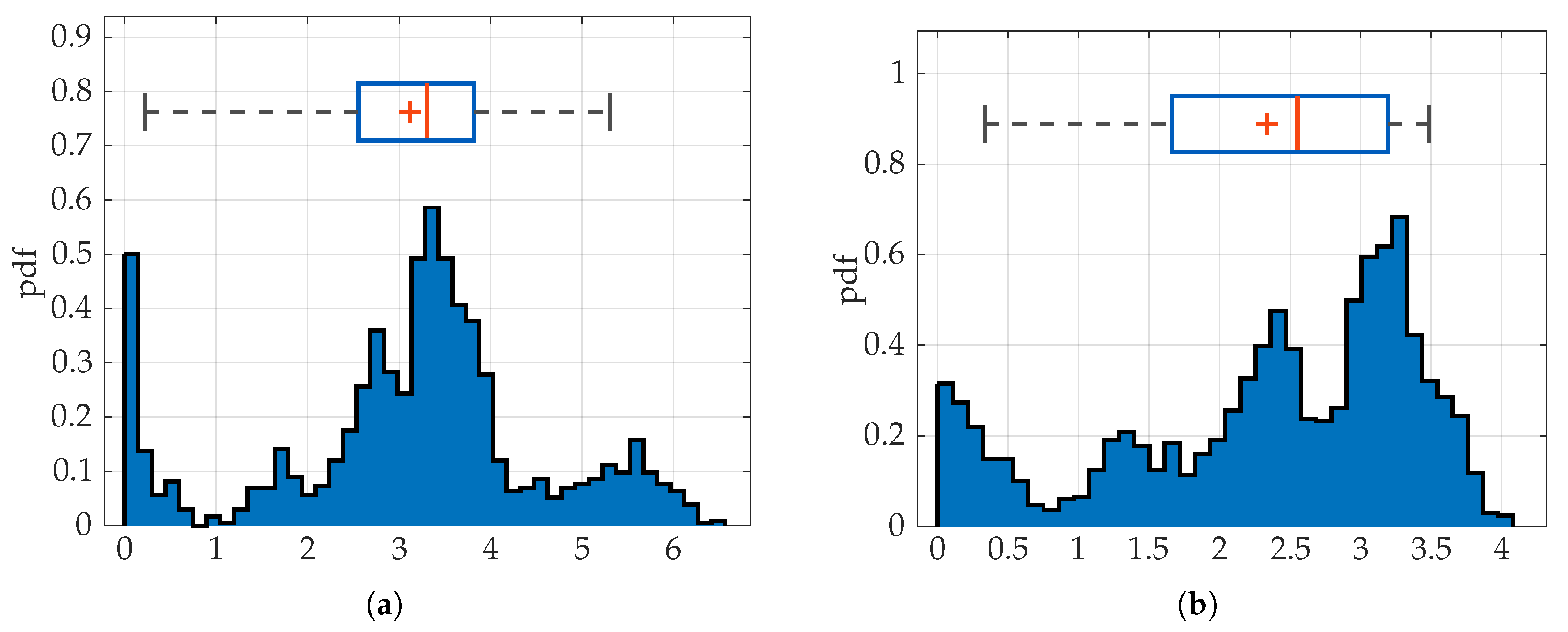
As a result, we find that the mean absolute error of the angle
is
, and the standard deviations is
. With respect to the angle
of the DIP joint, the mean absolute error is
, and the standard deviations is
. Moreover, the probability density function of PIP joint’s absolute error presents two peaks values—the first shows a concentration around zero degrees that corresponds to the error during free movement, and the second is the error when the finger gets in contact with the object. Likewise, the probability density function of DIP joint’s absolute error presents three peaks values, the first around zero degrees during free movement; and the two others during the contact phase. Both probability density functions are presented in
Figure 18a,b, in which red lines represent the median, cross is the mean, a blue box represents the 25% and 75% quartiles and whiskers bound 9% and 91%. Presented results correspond to the analysis of 1566 samples, captured during 31.32 s of records, in which the robotic finger performs five trials of flexion–extension movement.
This error, present in the articular joint values and , is the result of the self-adaptability of the finger to objects during contact. This effect is the result of the low stiffens of tendons used in the soft epicyclical mechanism.
The required force must be expressed in terms of the equivalent torque that acts on the input pulley. The way of converting the required fingertip force into the corresponding active torque is described in the following. To calculate the required torque using the proposed dynamic model, it is necessary to know the vector , which corresponds to the dependent and independent coordinates of the robotic finger. The values and correspond to the position of the center of masses , and are calculated during the experiment.
Finally, applying the dynamic and kinematic models, we calculate the required input torque for a force in the range N N, which corresponds to the target force interval. The input torque must be in the interval Nmm Nmm]. Taking into account that the ProMain-I finger radius is 7 mm, the required force of the actuator must be in the interval N N]. Consequently, tendons mus support a stress in the interval MPa MPa]. Due to the combination of the epicyclical mechanism with the serial servomotor, the actuation system can perform up to 2.028 cycles/s. Consequently, in this study, we are not focused on the required frequency interval, which is much lower than the capacity of the actuation system.
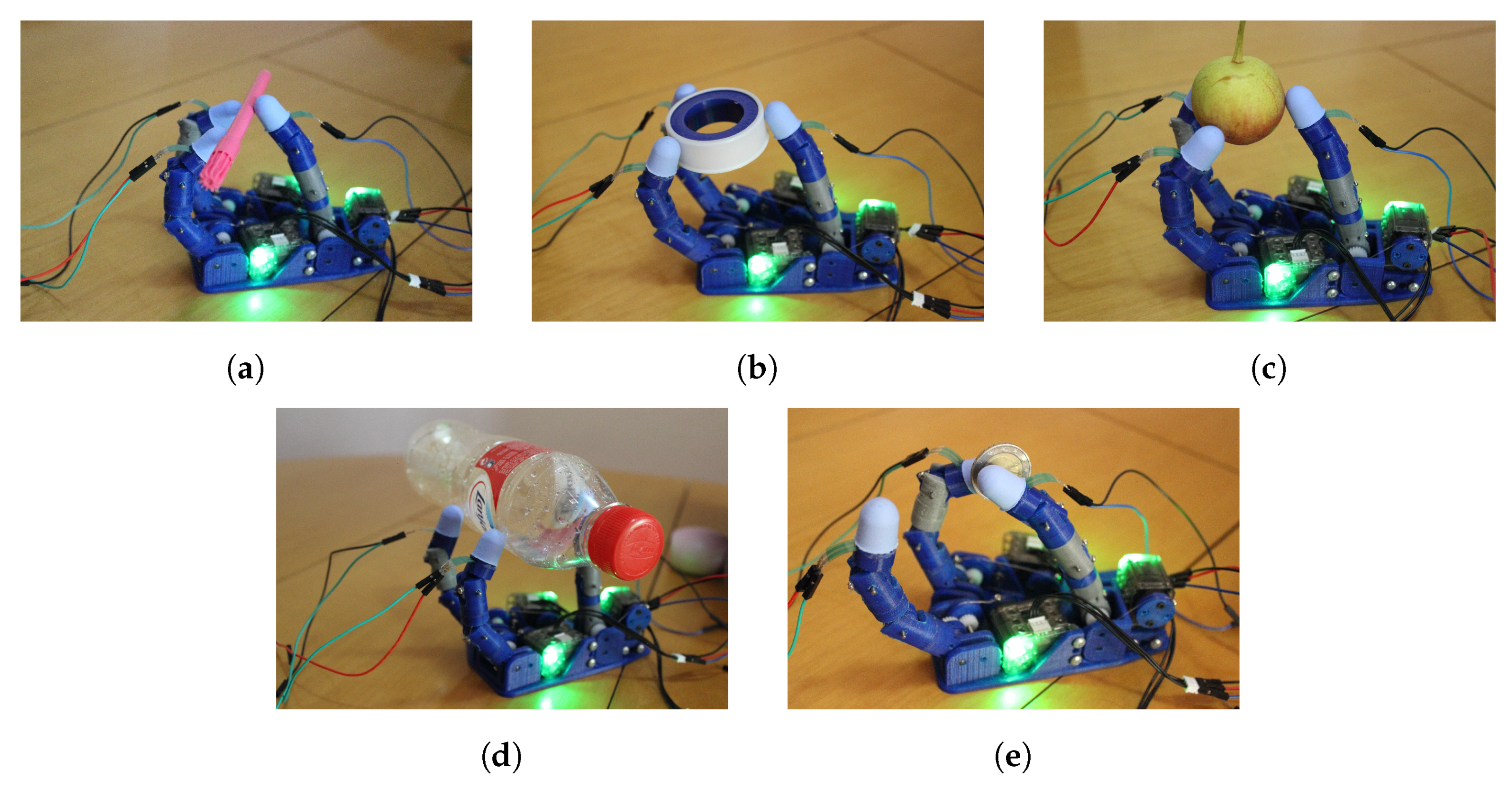
Regarding finger capabilities for grasping, we have carried out several tests using the prototype in a platform, which places the fingers in opposition, guaranteeing the possibility to grasp different objects.
Figure 19 shows exemplary grasping of: a pen, a tape, an apple, a bottle, and a coin.
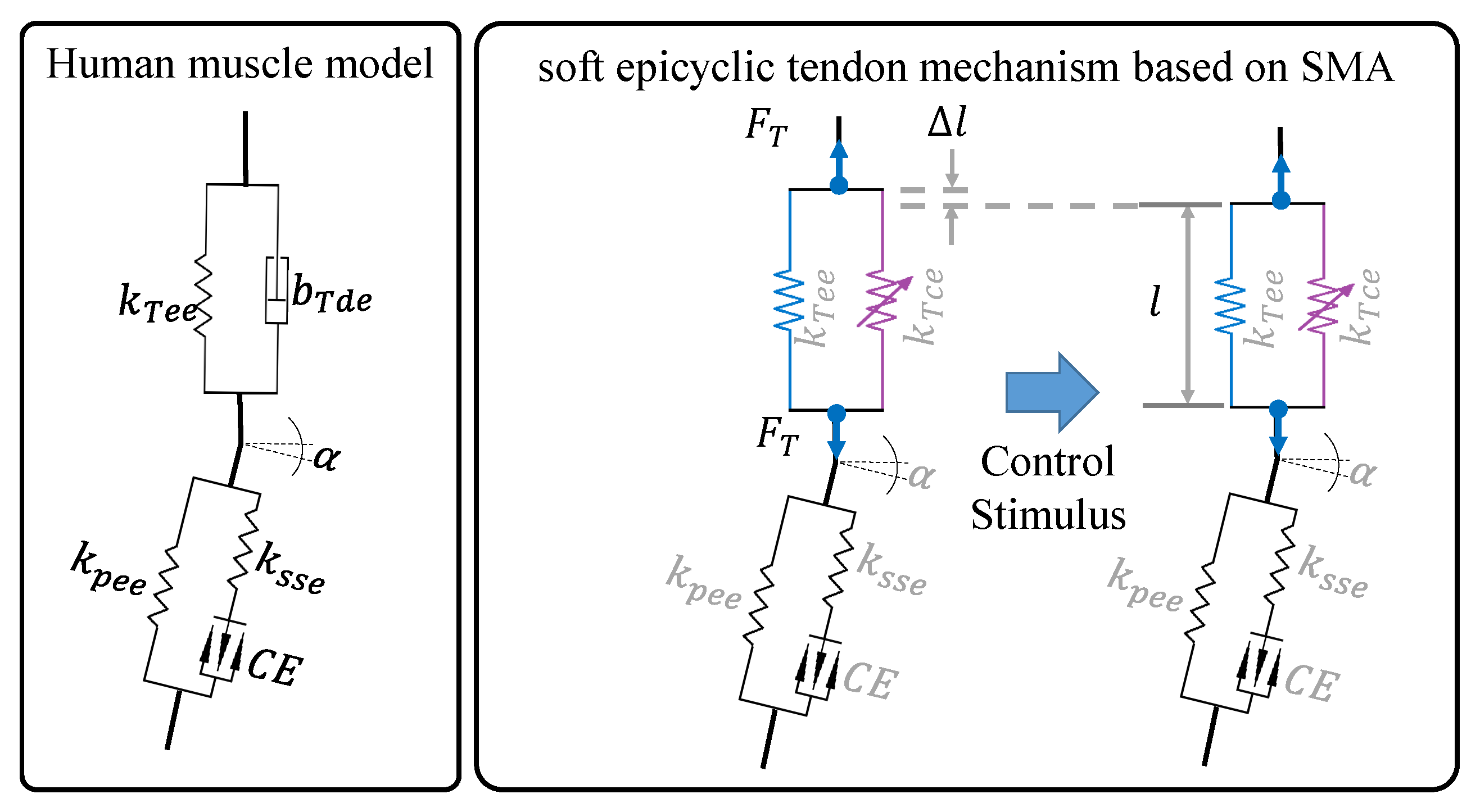
Furthermore, under some particular conditions, the flexibility of the tendons requires being adapted to grasp objects in a more steady way. Taking into account that the addition of damper element in the tendon adds extra constraints to the soft behavior of the epicyclical mechanism, and considering the advantages of smart materials, we modify the driving mechanism by adding a Shape Memory Alloy (SMA) wire in parallel to flexible tendons to control joint stiffness during grasping. As a result, a new soft epicyclical tendon-driven actuation system based on SMA is proposed.
The soft epicyclical tendon-driven actuation system is also based on the proposed Hill’s muscle model, but the damper is substituted by an SMA wire in order to control the mechanism’s stiffness. As can be seen in
Figure 20, the SMA wire
is placed in parallel to the elastic tendon
. During the operation, when the tendon is under a tension
, a control stimulus (temperature increment) shifts the SMA wire to austenite phase, increasing the stiffness to recover the produced strain.
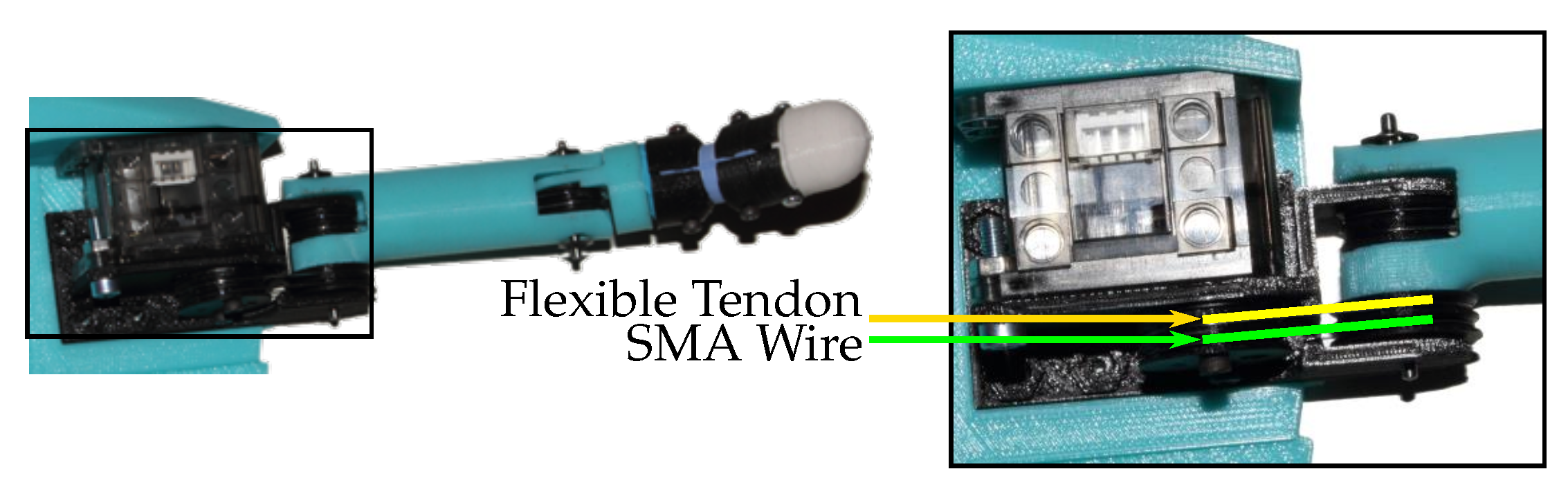
Consequently, the soft epicyclical tendon-driven actuation system based on SMA has been implemented, placing a wire of SMA in parallel with a Nylon wire. The used shape memory alloy wire is a FLEXINOL
© actuator—which is a trade name for nickel–titanium SMA wires—with 0.38 mm diameter, bought at Dynallow Inc. [
34].
Figure 21 shows the implementation in the new robotic finger.
Preliminary tests have shown that the substitution of the damper element by an SMA wire can reduce or eliminate the overshoot of dependent joint angles. Analytically, it can be seen that a variable stiffness element, in parallel with an elastic element, can handle global stiffness of the mechanism and render it adaptable to several grasping situations. On the other hand, the transient state of the system can be changed from a critically-damped to an over-damped behavior. In the following, our research aims to test and validate this theory, through the implementation of a test platform, following the same architecture described in this paper. We expect that the variable stiffness can fulfill damping requirements, helping to mimic the behavior of human muscles.
The retained identification of the SMA Young’s Modulus during full austenite and martensite phases was proposed by Ramirez Arias [
22], who performed an experiment using a test machine. Seven specimens of SMA wires were tested in uniaxial tension: (1) The wires are tested with thermal stimulus to measure the Young’s modulus in full austenite phase; (2) then, a thermal stimuli is removed to measure the Young’s modulus in full martensite phase.
Ramirez Arias [
22] generated the thermal stimuli using a DC source, in which voltage and current are controlled, then the temperature was measured and when it exceeded the reported max temperature of
C [
34], the measure of the Young’s Modulus in full austenite phase was performed. The identified Young’s modulus in martensite and austenite phases is presented in
Table 2.
As a result, we obtain a soft epicyclical mechanism based on SMA, which can control the stiffness of joints. This mechanism can help to mimic human muscles behavior accurately. Moreover, the possibility of variable stiffness in joints led to the increment in the performance of steady grasping.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}