Applicability of Shape Memory Alloys in Aircraft Interiors


Abstract
:1. Introduction
2. Shape Memory Alloys
2.1. Basics of Shape Memory Alloys
2.2. Applications of SMA-Based Actuator Systems in Aircraft Engineering
3. Requirements for SMA-Based Actuator Systems in Aircraft Interiors
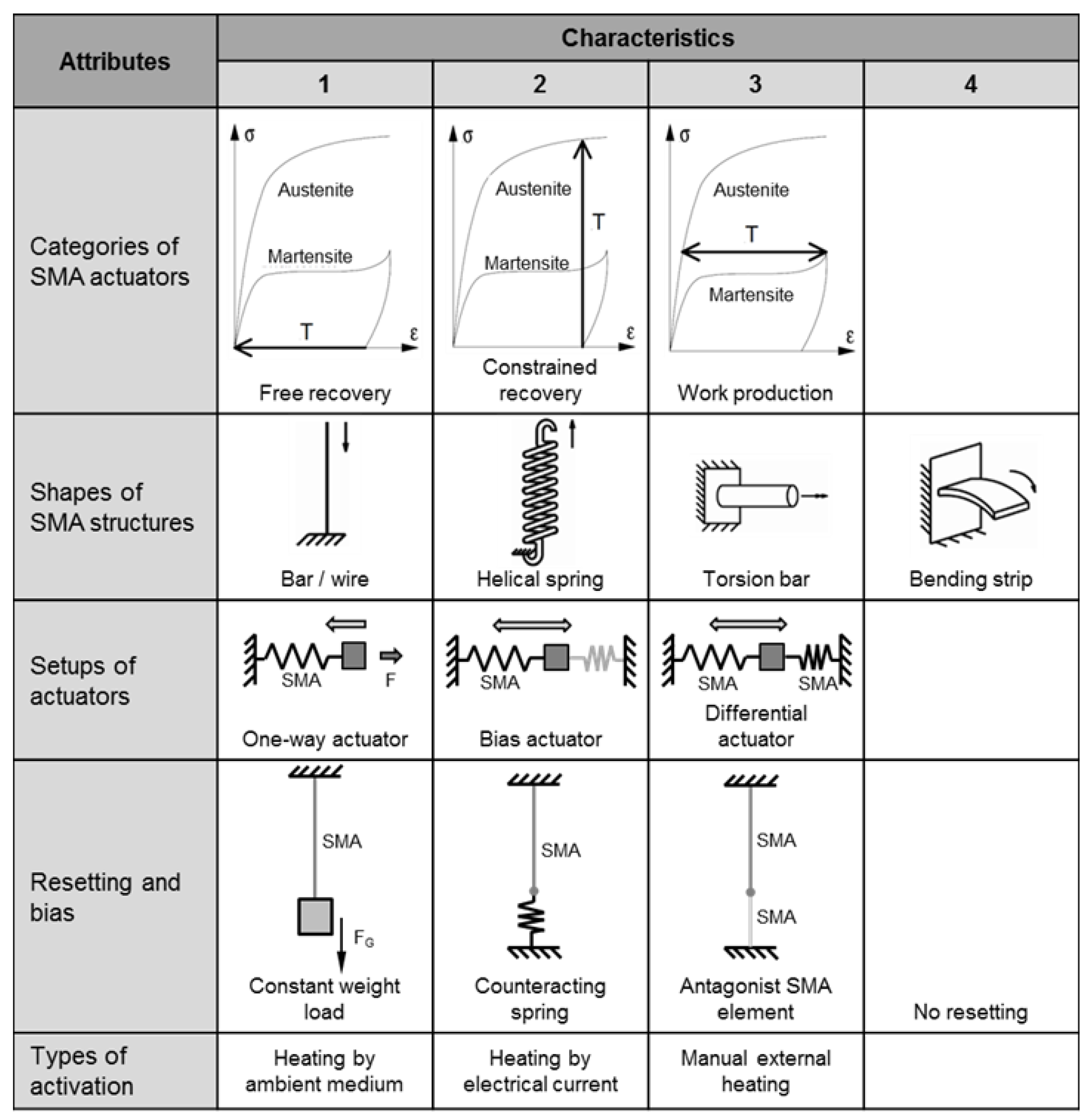
4. Conceptual Design of SMA-Based Actuator Systems
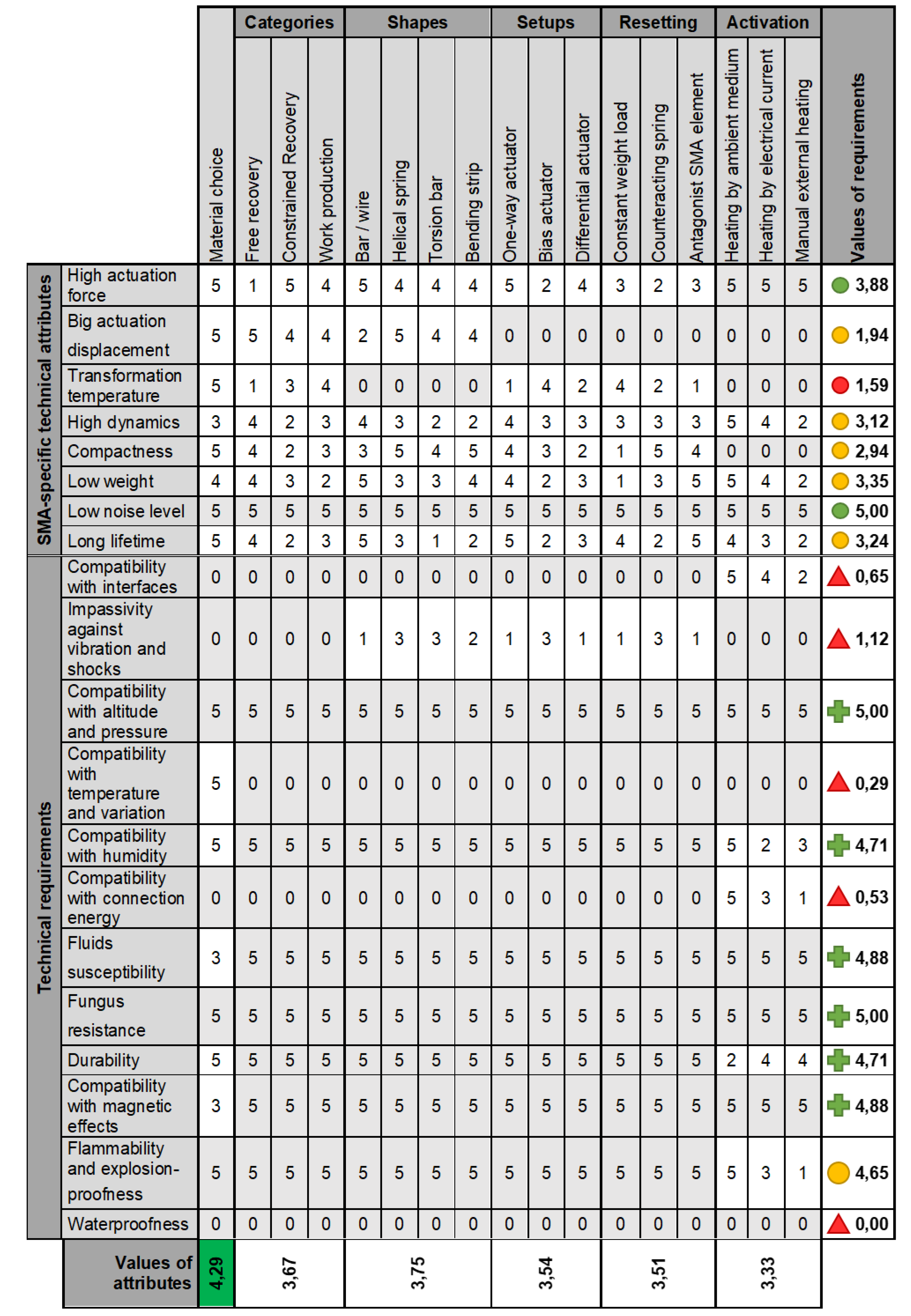
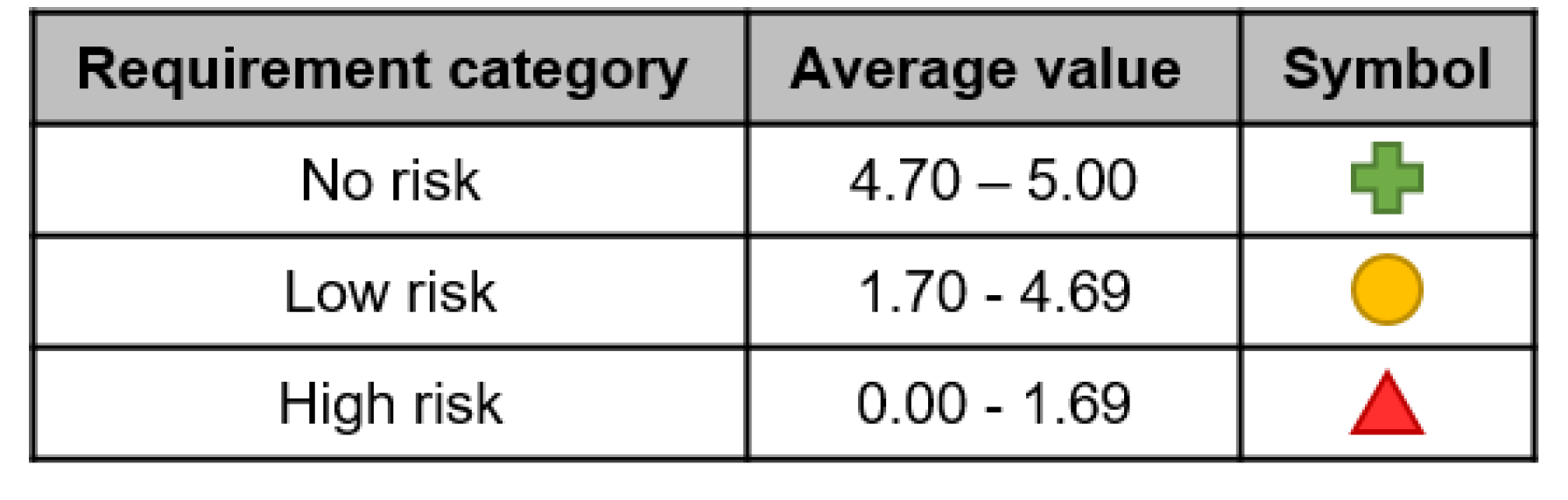
5. Evaluation of Requirements Feasibility
5.1. Rating the Applicability of SMA-Based Actuators in Aircraft Interiors
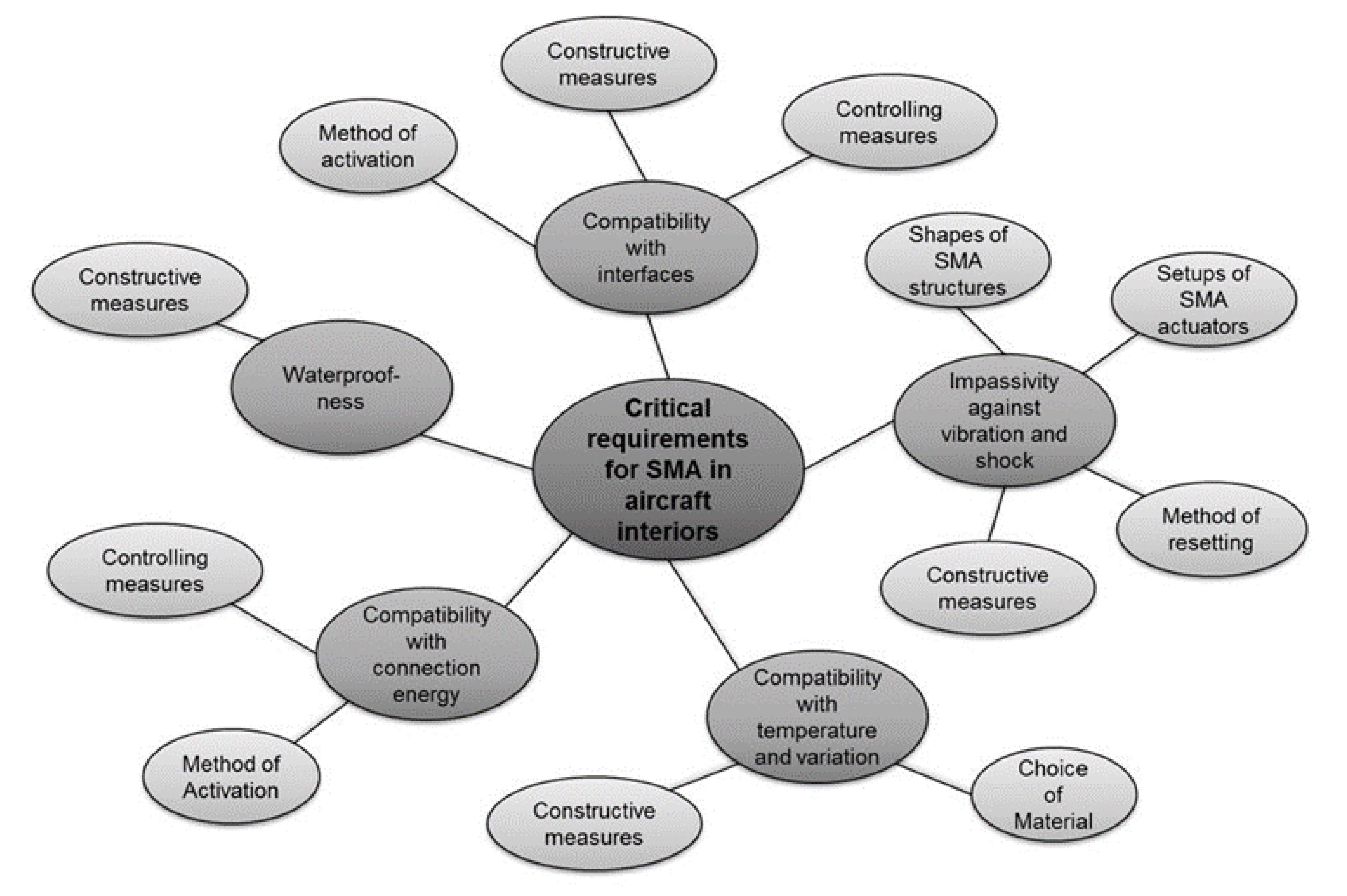
5.2. Cluster of Critical Requirements
- compatibility with humidity,
- durability,
- fluids susceptibility and
- compatibility with magnetic effects.
- waterproofness,
- compatibility with temperature and temperature variation,
- compatibility with connection energy,
- compatibility with interfaces, and
- impassivity against vibration and shock.
5.3. Realized SMA Actuators for Aircraft Interiors
6. Conclusions and Outlook
Author Contributions
Funding
Conflicts of Interest
References
- Bundesverband der Deutschen Luftverkehrswirtschaft e.V. Report on Energy Efficiency and Climate Protection in Air Traffic in Essential Ratios; Bundesverband e.V.: Berlin, Germany, 2015. [Google Scholar]
- Braun, N. How Can Aviation Become More Environmentally Friendly? Available online: http://www.airliners.de/wie-luftfahrt-antworten-cockpit-12/36398 (accessed on 10 July 2019). (In German).
- Bundesverband der Deutschen Fluggesellschaften e.V. Climate & Environment. Available online: http://www.bdf.aero/themen/klima-umwelt (accessed on 10 July 2019). (In German).
- Bundesverband der Deutschen Fluggesellschaften e.V. Technical Progress for Even Greater Energy Efficiency. Available online: http://www.bdf.aero/themen/klima-umwelt/technischer-fortschritt (accessed on 10 July 2019). (In German).
- Lagoudas, D.C. Shape Memory Alloys Modeling and Engineering Applications; Springer US: New York, NY, USA, 2008; ISBN 978-0-387-47684-1. [Google Scholar]
- Lygin, K. A Methodology for the Development of Environment-Activated FG Actuators with Low Thermal Hysteresis Using the Example of Heating and Air-Conditioning Technology. In German: Eine Methodik zur Entwicklung von umgebungsaktivierten FG-Aktoren mit geringer thermischer Hysterese am Beispiel der Heizungs- und Klimatechnik; Verlag Dr. Hut GmbH: München, Germany, 2014; ISBN 9783843916202. [Google Scholar]
- Liu, Y.; Kohl, M. Shape Memory Microvalves with High Energy Density, In German: Formgedächtnis-Mikroventile mit hoher Energiedichte. Master’s Thesis, Karlsruhe Institute of Technology (KIT), Karlsruhe, Germany, 2003. [Google Scholar]
- Jani, J.M.; Leary, M.; Gibson, M.A. A review of shape memory research, applications and opportunities. Mater. Des. 2014, 56, 1078–1113. [Google Scholar] [CrossRef]
- Treppmann, D. Thermomechanical Treatment of NiTi with Solutions for Quality Assurance and Standardization of Shape Memory Alloys. In German: Thermomechanische Behandlung von NiTi mit Lösungsansätzen für Qualitätssicherung und Normung von Formgedächtnislegierungen. Master’s Thesis, Ruhr-Universität Bochum, Bochum, Germany, 1996. [Google Scholar]
- Mavroidis, C.; Pfeiffer, C.; Mosley, M. Conventional Actuators, Shape memory alloys and Electrorheological fluids. In Automation, Miniature Robotics and Sensors for Non-Destructive Testing and Evaluation; ASNT: Columbus, OH, USA, 1999. [Google Scholar]
- Musolff, A. Experimental Investigation and Building of Adaptive Structures. Master’s Thesis, Ruhr-Universität Bochum, Bochum, Germany, 2005. [Google Scholar]
- Schiedeck, F.; Mojrzisch, S. Improvement of SMA Actuator Performance Using Self-Sensing. In Proceedings of the 11th International Conference on New Actuators, ACTUATOR 2008, Bremen, Germany, 9–11 June 2008; pp. 891–894. [Google Scholar]
- Janocha, H. Adaptronics and Smart Structures. Basics, Materials, Design, and Applications, 2nd ed.; Springer-Verlag: Berlin/Heidelberg, Germany, 2007; ISBN 3540719652. [Google Scholar]
- Ohkata, I.; Suzuki, Y. The design of SMA actuators and their applications. In Shape Memory Materials; Otsuka, K., Wayman, C.M., Eds.; Cambridge University Press: Cambridge, UK, 1998. [Google Scholar]
- Gümpel, P.; Gläser, S.; Jost, N.; Mertmann, M.; Seitz, N.; Strittmatter, J. Shape memory alloys Applications in mechanical engineering, medical technology and actuators. In German: Formgedächtnislegierungen Einsatzmöglichkeiten in Maschinenbau, Medizintechnik und Aktuatorik; Expert Verlag: Renningen, Germany, 2004; ISBN 3-81692293-7. [Google Scholar]
- Kristen, M. Investigation into the electrical control of shape memory drives in handling technology. In German: Untersuchung zur elektrischen Ansteuerung von Formgedächtnis-Antrieben in der Handhabungstechnik; Technische Universität Braunschweig: Braunschweig, Germany, 1994. [Google Scholar]
- Johnson Matthew Medical Components. Nitinol-Technical-Properties. Available online: http://jmmedical.com/resources/221/Nitinol-Technical-Properties.html (accessed on 10 July 2019).
- Wagner, M.F. Ein Beitrag zur Strukturellen und Funktionalen ERMÜDUNG von Drähten und Federn aus NiTi-Formgedächtnislegierungen. Master’s Thesis, Ruhr Universität Bochum, Bochum, Germany, 2005. [Google Scholar]
- Eggeler, G.; Hornbogen, E.; Yawny, A.; Heckmann, A.; Wagner, M. Structural and functional fatigue of NiTi shape memory alloys. Mater. Sci. Eng. A 2004, 378, 24–33. [Google Scholar] [CrossRef]
- Sofla, A.Y.N.; Elzey, D.M.; Wadley, H.N.G. Cyclic degradation of antagonistic shape memory actuated structures. Smart Mater. Struct. 2008, 17, 25014. [Google Scholar] [CrossRef]
- Erbstoeszer, B.; Armstrong, B.; Taya, M.; Inoue, K. Stabilization of the shape memory effect in NiTi: An experimental investigation. Scr. Mater. 2000, 42, 1145–1150. [Google Scholar] [CrossRef]
- Pathak, A. The Development of an Antagonistic SMA Actuation Technology for the Active Cancellation of Human Tremor. Ph.D. Thesis, University of Michigan, Ann Arbor, MI, USA, 2010. [Google Scholar]
- Prahlad, H.; Chopra, I. Design of a Variable Twist Tilt-Rotor Blade Using Shape Memory Alloy (SMA) Actuators. In Proceedings of the 8th Annual International Symposium on Smart Structures and Materials, Newport Beach, CA, USA, 4–8 March 2001; pp. 46–59. [Google Scholar]
- Huang, W. Shape Memory Alloys and their Application to Actuators for Deployable Structures. Ph.D. Thesis, University of Cambridge, Cambridge, UK, 1998. [Google Scholar]
- Landis, G.A.; Jenkins, P.P. Dust on Mars: Materials Adherence Experiment results from Mars Pathfinder. In Proceedings of the Photovoltaic Specialists Conference, Anaheim, CA, USA, 29 September—3 October 1997; pp. 865–869. [Google Scholar] [CrossRef]
- Peffer, A.; Denoyer, K.; Fosness, E.; Sciulli, D. Devlopment and Transition of Low-Shock Spacecraft Release Devices. In Proceedings of the Aerospace Conference, Big Sky, MT, USA, 25 March 2000; pp. 277–284. [Google Scholar]
- Kauffman, G.B.; Mayo, I. The Story of Nitinol: The Serendipitous Discovery of the Memory Metal and Its Applications. Science and technology abound with examples of serendipity. Chem. Educ. 1996, 2, 1–21. [Google Scholar] [CrossRef]
- Yamauchi, K.; Ohkata, I.; Tsuchiya, K.; Miyazaki, S. Shape Memory and Superelastic Alloys. Technologies and Application; Woodhead Publishing: Cambridge, UK, 2011; ISBN 978-1-84569-707-5. [Google Scholar]
- Bil, C.; Massey, K.; Abdullah, E.J. Wing morphing control with shape memory alloy actuators. J. Intell. Mater. Syst. Struct. 2013, 24, 879–898. [Google Scholar] [CrossRef]
- Sofla, A.Y.N.; Meguid, S.A.; Tan, K.T.; Yeo, W.K. Shape morphing of aircraft wing: Status and challenges. Mater. Des. 2010, 31, 1284–1292. [Google Scholar] [CrossRef]
- Kudva, J.N. Overview of the DARPA Smart Wing Project. J. Intell. Mater. Syst. Struct. 2004, 15, 261–267. [Google Scholar] [CrossRef]
- Hartl, D.J.; Lagoudas, D.C. Aerospace applications of shape memory alloys. J. Aerosp. Eng. 2007, 221, 535–552. [Google Scholar] [CrossRef] [Green Version]
- Pitt, D.; Dunne, J.; White, E.; Garci, E. SAMPSON Smart Inlet SMA Powered Adaptive Lip Design and Static Test. In Proceedings of the 42nd AIAA Structures, Structural Dynamics and Materials Conference, Seattle, WA, USA, 16 April 2001; pp. 1–11. [Google Scholar]
- Eppler, C. Entriegelung von Sauerstoffmasken mit Formgedächtnislegierungen. Available online: https://www.iwu.fraunhofer.de/content/dam/iwu/de/documents/Infoblatt/Infoblatt-Entriegelung-von-Sauerstoffmasken.pdf (accessed on 10 July 2019).
- Bokaie, M.D.; Busch, J.D.; Johnson, A.D.; Petty, B. Release Device for Retaining Pin. U.S. Patent 5,771,742, 30 June 1998. [Google Scholar]
- TZ Aero Asset Maintainability. New Mechanisms: Freedom to Design New Configurations. Available online: http://aam.tz.net/new-mechanisms (accessed on 22 February 2015).
- Ahrens, G. Das Erfassen und Handhaben von Produktanforderungen: Methodische Voraussetzungen und Anwendungen in der Praxis. Ph.D. Thesis, Technische Universität Berlin, Berlin, Germany, 2000. [Google Scholar]
- Benafan, O.; Brown, J.; Calkins, F.T.; Kumar, P.; Stebner, A.P.; Turner, T.L.; Vaidyanathan, R.; Webster, J.; Young, M.L. Shape memory alloy actuator design: CASMART collaborative best practices and case studies. Int. J. Mech. Mater. Des. 2014, 10, 1–42. [Google Scholar] [CrossRef]
- Verein Deutscher Ingenieure. Produktentwicklung mit Formgedächtnislegierungen (FGL). Werkstoffauswahl und Nomenklatur; The Verein Deutscher Ingenieure (VDI): Düsseldorf, Germany, 2017; ICS 77.100, 77.120.99 (VDI 2248 Blatt 2). [Google Scholar]
- Kohl, M. Development of Microactors from Shape Memory Alloys. In German: Entwicklung von Mikroaktoren aus Formgedächtnislegierungen; Institute of Microstructure Technology IMT: Eggenstein-Leopoldshafen, Germany, 2002. [Google Scholar]
- Langbein, S. Local Configuration and Partial Activation of Shape Memory Effect to Create Smart Part Structures. In German: Lokale Konfiguration und partielle Aktivierung des Formgedächtniseffektes zur Erzeugung smarter Bauteilstrukturen. Ph.D. Thesis, Ruhr Universität Bochum, Bochum, Germany, 2009. [Google Scholar]
- Huang, W. On the selection of shape memory alloys for actuators. Mater. Des. 2002, 23, 11–19. [Google Scholar] [CrossRef]
- Langbein, S.; Czechowicz, A. Design Practice Shape Memory Technology Potentials—Design—Examples. In German: Konstruktionspraxis Formgedächtnistechnik Potentiale—Auslegung–Beispiele; Springer Vieweg: Wiesbaden, Germany, 2013; ISBN 978-3-8348-1957-4. [Google Scholar]
- Schiedeck, F. Entwicklung eines Modells für Formgedächtnisaktoren im geregelten dynamischen Betrieb; PZH Produktionstechn; Zentrum: Garbsen, Germany, 2009. [Google Scholar]
- Verein Deutscher Ingenieure. Produktentwicklung mit Formgedächtnislegierungen (FGL). Entwicklungsmethodik; The Verein Deutscher Ingenieure (VDI): Düsseldorf, Germany, 2017; ICS 77.100, 77.120.99 (VDI 2248 Blatt 5). [Google Scholar]
- Benafan, O.; Brown, J.; Calkins, F.T.; Kumar, P.; Stebner, A.; Turner, T.; Vaidyanathan, R.; Webster, J.; Young, M.L. Shape Memory Alloy Actuator Design: CASMART Collaborative Best Practices. In Proceedings of the ASME 2011, Baltimore, MD, USA, 17–21 July 2011. [Google Scholar]
- Motzki, P. Advanced Design and Control Concepts for Actuators Based on Shape Memory Alloy Wires. Ph.D. Thesis, Universität des Saarlandes, Saarbrücken, Germany, 2018. [Google Scholar]
- Ditman, J.B.; Bergman, L.A.; Tsao, T.-C. The Design of Extended Bandwidth Shape Memory Alloy Actuators. J. Intell. Mater. Syst. Struct. 1996, 7, 635–645. [Google Scholar] [CrossRef]
- Rathmann, C.; Fleczok, B.; Kreimeier, D. An investigation using self-sensing to estimate the lifetime of shape memory actuators. In Proceedings of the International Conference on Applied Science and Engineering, Seoul, Korea, 27–29 June 2015. [Google Scholar]
- Kreimeier, D.; Otibar, D.; Weirich, A. Vorhaben: FLAAI—Formgedächtnis-Leichtbauaktoren für Anwendungen im Aircraft-Interiorbereich, Schlussbericht zum BMWi Projekt im Rahmen des LuFo V-1 Förderlinie “Ökoeffizientes Fliegen; Ruhr Universität Bochum: Bochum, Germany, 30 September 2017. [Google Scholar]
- Otibar, D.; Weirich, A.; Kortenjann, M.; Kuhlenkötter, B. A Preliminary Investigation of Temperature Dependency of a Shape Memory Actuator with Time-Based Control in Aircraft Interiors. IOP Conf. Ser. Mater. Sci. Eng. 2017, 216, 12009. [Google Scholar] [CrossRef] [Green Version]
- Weirich, A.; Otibar, D.; Theren, B.; Kuhlenkötter, B. Integration einer Zustandsüberwachung in eine antagonistische form-gedächtnisbasierte Verriegelung. Integration of a Condition Monitoring System into an Antagonistic Shape Memory Based Locking Device. In Proceedings of Fachtagung Mechatronik 2019, Paderborn, Germany, 27–28 March 2019; pp. 73–78. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristics | NiTi | |
|---|---|---|
| Transformation properties | Temperature hysteresis | ~30 [K] |
| Transformation temperature | −100…+100 [°C] | |
| Specific energy density | 3000 [J/kg] | |
| Max. attainable strain (one-way effect) | 8 [%] | |
| Max. attainable strain (two-way effect) | 4–6 [%] | |
| Max. attainable strain (pseudoelastic effect) | 7 [%] | |
| Typical number of cycles | 100,000 | |
| Mechanical properties | Admissible stress for actuator cycling | 150–50 [MPa] |
| Young’s modulus | 35–70 [GPa] | |
| Yield strength | 70–690 [MPa] | |
| Tensile strength | 800–1000 [MPa] | |
| Elongation to Failure | 40–50 [%] | |
| Physical properties | Density | 6.45 [g/cm³] |
| Thermal conductivity | 6.6–10 [10−6 K−4] | |
| Electrical resistivity | 0.5–1.1 [10−6 Ωm] | |
| Corrosion resistance | Very good | |
| Biological compatibility | Very good | |
| Other | Processing | Difficult |
| Price | Expensive | |
| Sensor function | intrinsic |
| Identified Customer Requirements | |
|---|---|
| Substitute | The product must fulfill all functions the previous product has offered. |
| It must not be bigger/require more space. | |
| It must be at least as light as the previous product. | |
| The manufacturing costs need to be as high as the previous costs or lower. | |
| The product must be compatible with the connected systems. | |
| The power consumption should not be higher than before. | |
| Advanced product | Overall, an advanced product must fulfill all requirements for substitutes, plus: |
| The product must offer new functions. | |
| The manufacturing costs should be lower than the previous costs, except for the case the additional functions legitimate higher costs. | |
| The power consumption should not be higher than before, except for the case the additional functions legitimate higher power consumption. | |
| New product | The product must offer new functions that are only possible with the use of SMA. |
| The benefit of the new product must legitimate additional work and expense. | |
| Universal requirements | The product must be certified to the standards of RTCA 160, ISO 2669, MIL 810 and MIL 202. |
| The standards of relevant aircraft manufacturers must be respected. | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Weirich, A.; Kuhlenkötter, B. Applicability of Shape Memory Alloys in Aircraft Interiors. Actuators 2019, 8, 61. https://doi.org/10.3390/act8030061
Weirich A, Kuhlenkötter B. Applicability of Shape Memory Alloys in Aircraft Interiors. Actuators. 2019; 8(3):61. https://doi.org/10.3390/act8030061
Chicago/Turabian StyleWeirich, Antonia, and Bernd Kuhlenkötter. 2019. "Applicability of Shape Memory Alloys in Aircraft Interiors" Actuators 8, no. 3: 61. https://doi.org/10.3390/act8030061
APA StyleWeirich, A., & Kuhlenkötter, B. (2019). Applicability of Shape Memory Alloys in Aircraft Interiors. Actuators, 8(3), 61. https://doi.org/10.3390/act8030061