Comparative Analysis among Single-Stage, Dual-Stage, and Triple-Stage Actuator Systems Applied to a Hard Disk Drive Servo System

Abstract
:1. Introduction
2. Plant Model
2.1. VCM Actuator
2.2. PZT Actuator
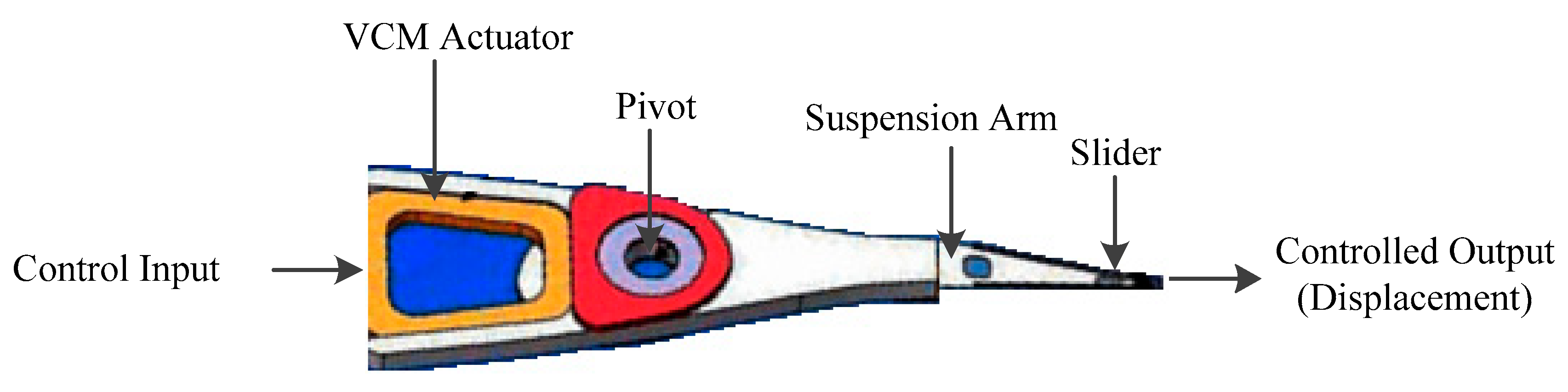
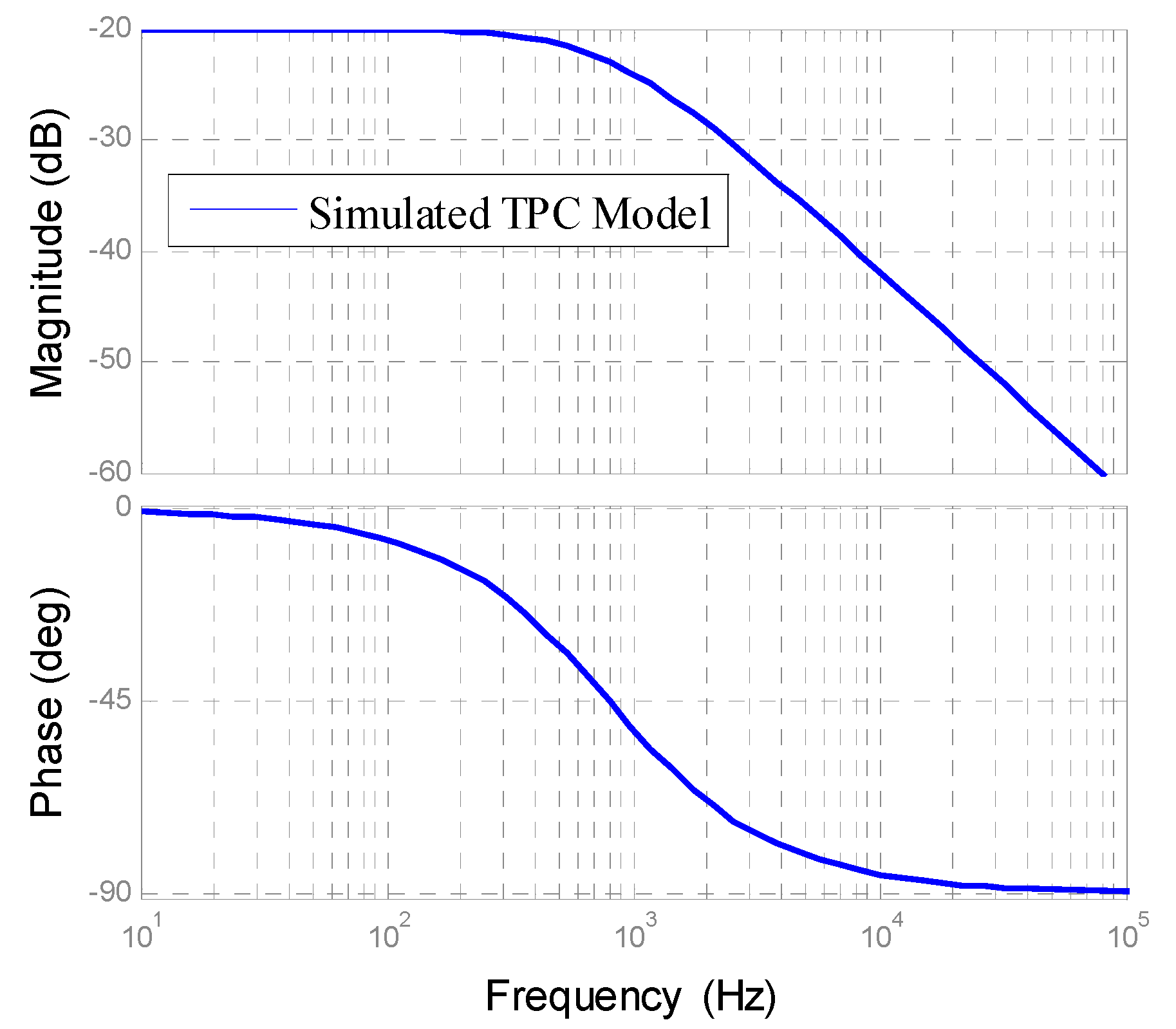
2.3. TPC Actuator
3. Control Architecture
4. Notch Filter
4.1. Notch Filter for VCM Actuator
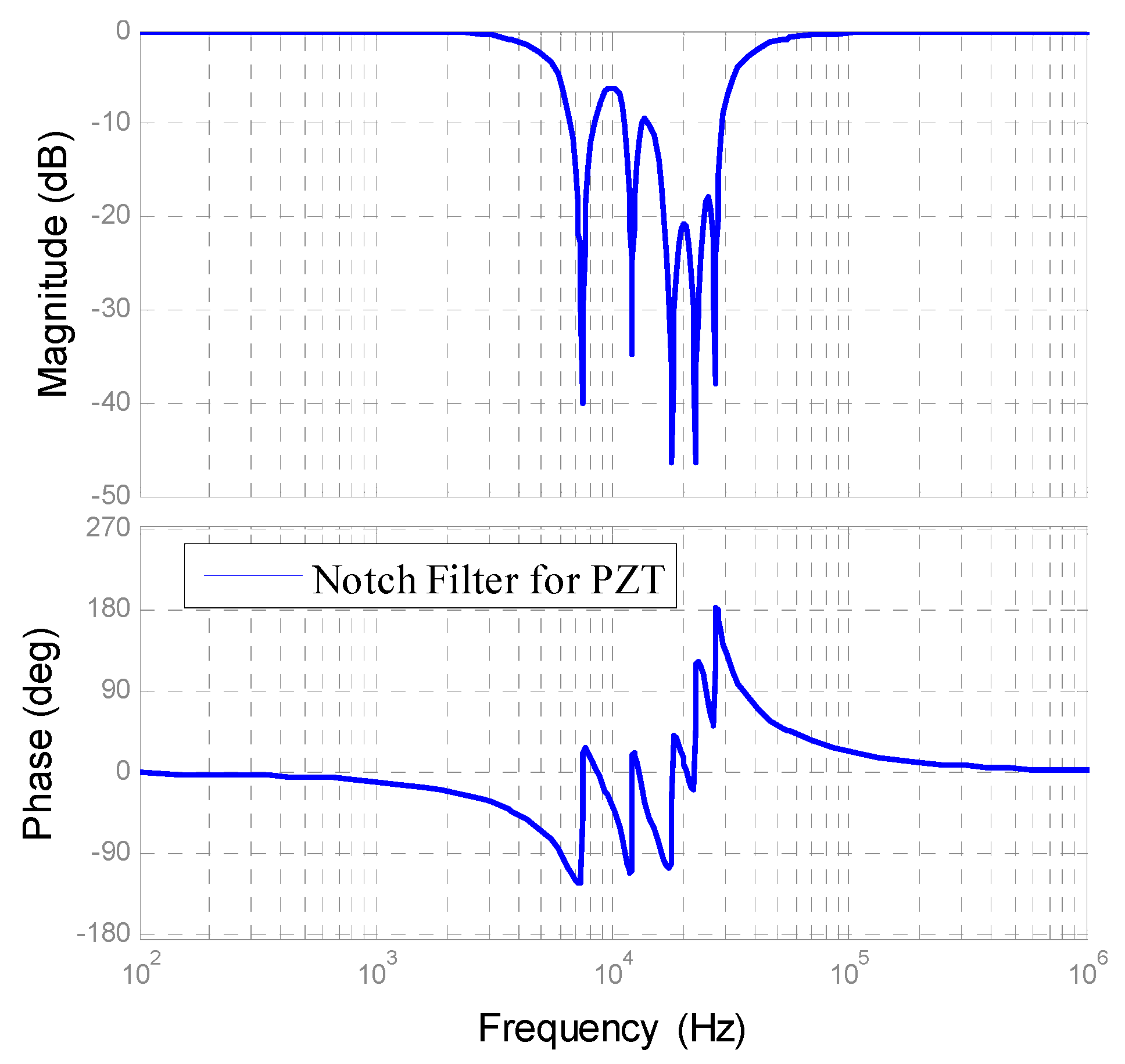
4.2. Notch Filter for PZT Actuator
5. Controller Design for Different Actuation System
5.1. PI Controller
5.2. PD Controller
5.3. PID Controller
5.4. Lag-Lead Compensator for VCM Loop
5.5. Lag Filter for PZT Loop
5.6. Inverse Lead Plus PI Controller for TPC Loop
6. Simulation Results
6.1. Simulation Results Using PID Controller
6.2. Simulation Results for Lag-Lead Controller as Primary and Lag Filter as Secondary Controller
6.3. Simulation Results for Inverse Lead Plus PI Controller as Tertiary Controller
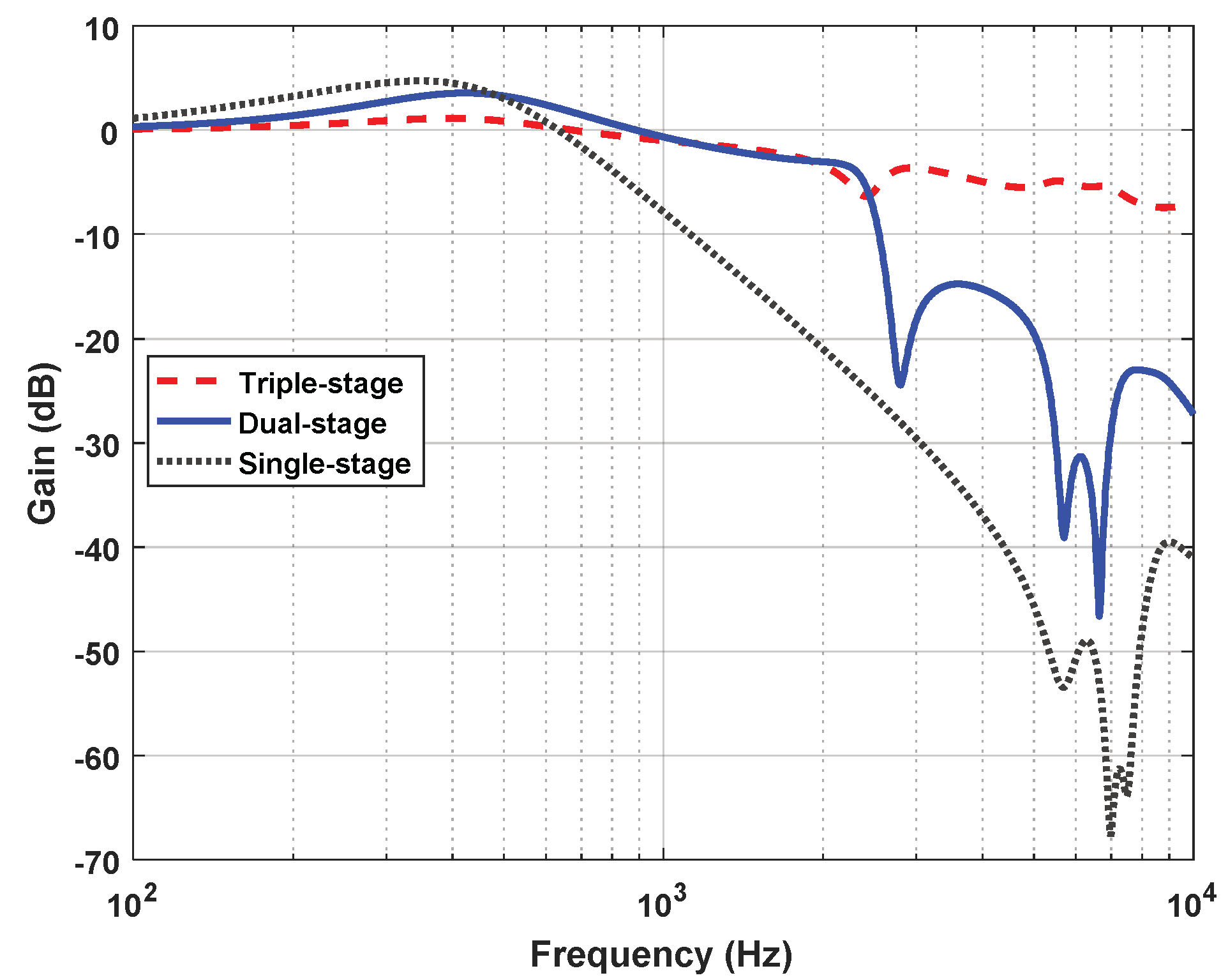
7. Comparison
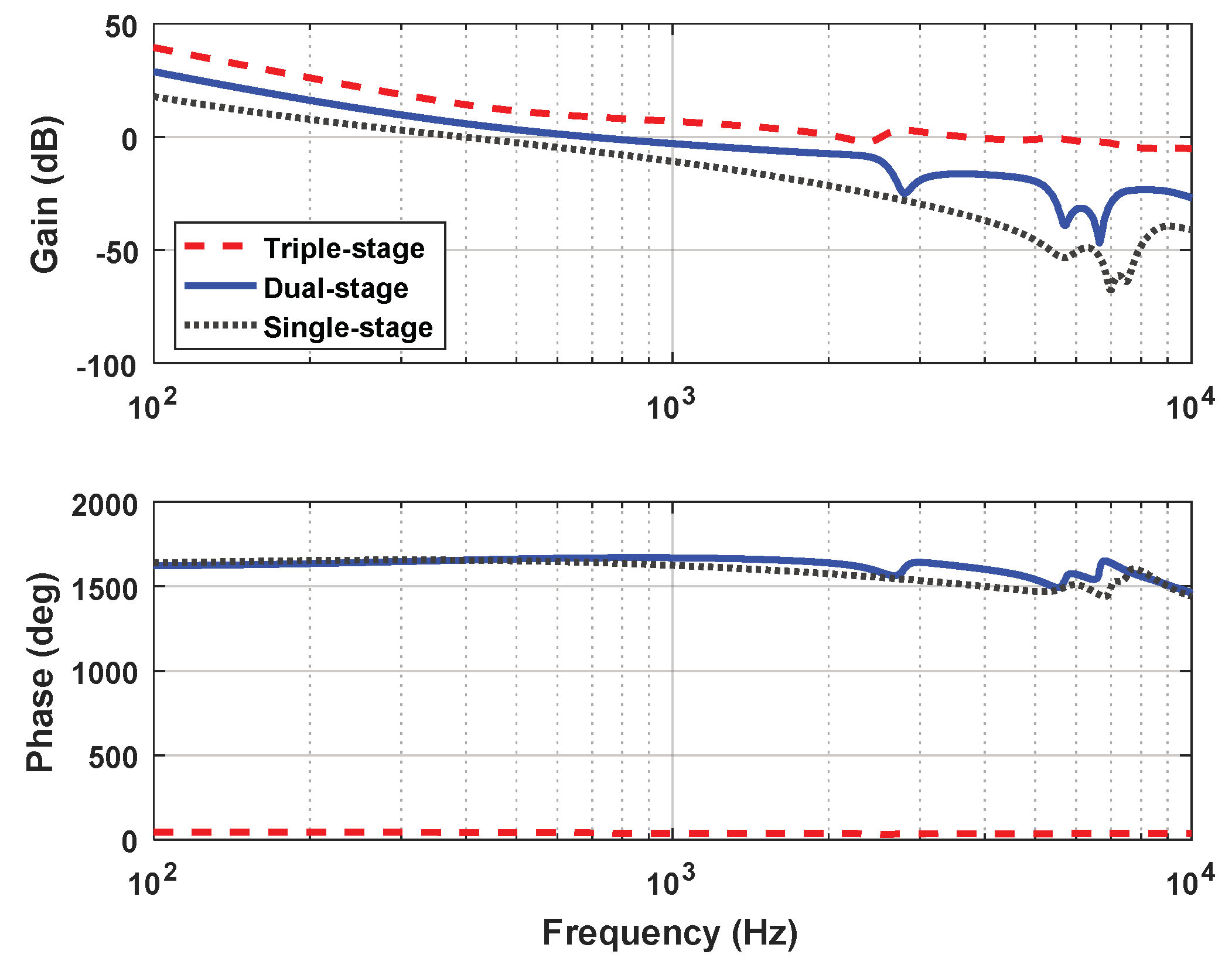
7.1. Sensitivity and Complimentary Sensitivity
- Sensitivity, ,
- and Complementary sensitivity,
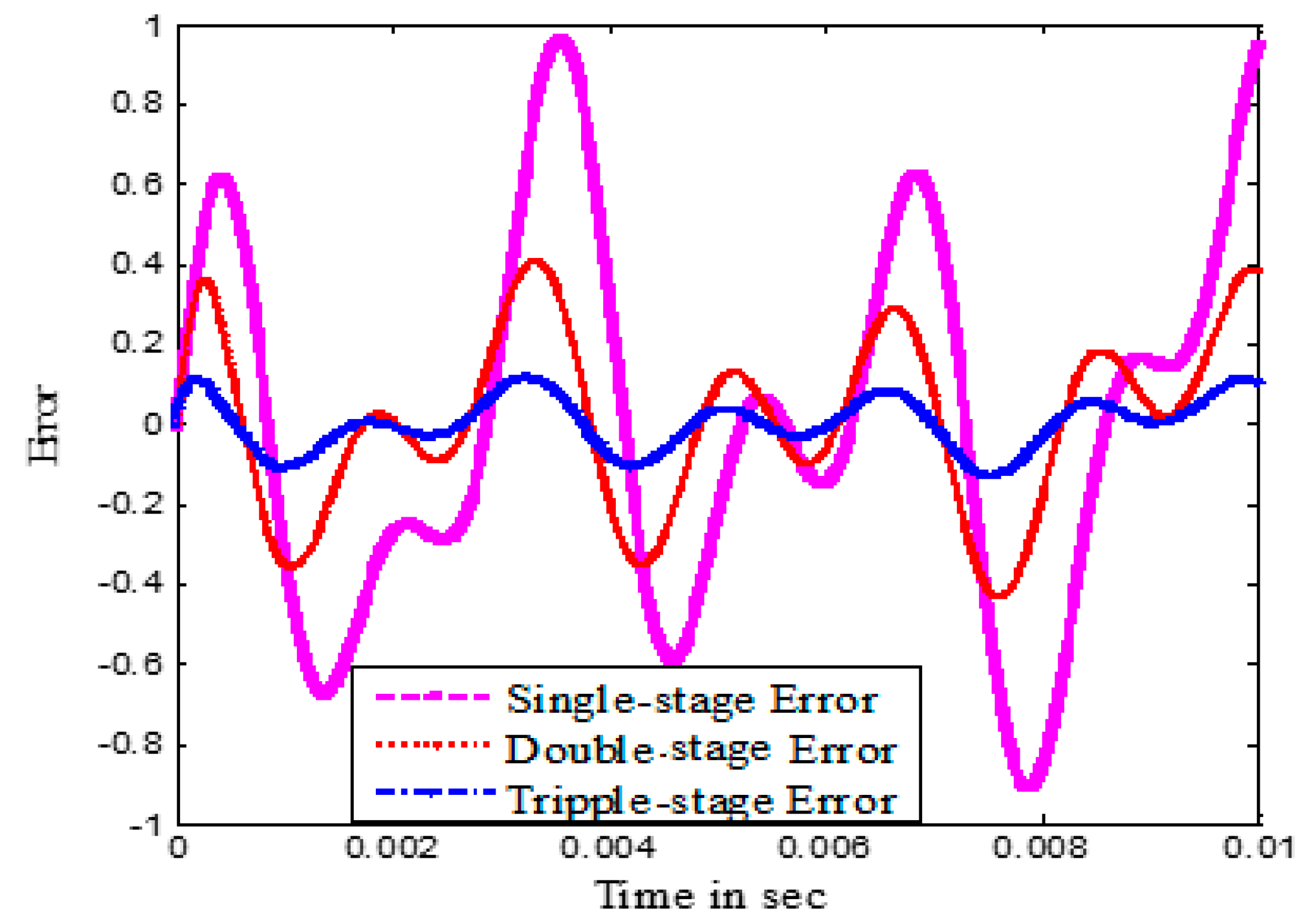
7.2. Error Signal and Bandwidth
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Hsia, Y.T. The ever shrinking hard disk drive and its components: What are the challenges? In Proceedings of the IEEE International Symposium on MicroNanoMechanical and Human Science, Nagoya, Japan, 5–8 November 2006; pp. 1–2. [Google Scholar]
- Li, Y.F. Dual-Stage Servo Control and Active Vibration Compensation in Magnetic Hard Disk Drives. Ph.D. Thesis, University of California, Berkeley, CA, USA, 2003. [Google Scholar]
- Huang, X.; Nagamune, R.; Horowitz, R.; Li, Y. Design and analysis of a dual-stage disk drive servo system using an instrumented suspension. In Proceedings of the IEEE American Control Conference, Boston, MA, USA, 30 June–2 July 2004; Volume 1, pp. 535–540. [Google Scholar]
- Guo, L.; Martin, D.; Brunnett, D. Dual-stage actuator servo control for high density disk drives. In Proceedings of the IEEE on Advanced Intelligent Mechatronics, Atlanta, GA, USA, 19–23 September 1999; pp. 132–137. [Google Scholar]
- Semba, T.; Hirano, T.; Hong, J.; Fan, L.S. Dual-stage servo controller for HDD using MEMS actuator. In Proceedings of the IEEE International Magnetics Conference, Kyongju, Korea, 18–21 May 1999; pp. 2271–2273. [Google Scholar]
- Al Mamun, A.; Guo, G.; Bi, C. Hard Disk Drive Mechatronics and Control; CRC Press: Boca Raton, FL, USA, 2006; Volume 23. [Google Scholar]
- Rahman, M.A.; Al Mamun, A.; Yao, K. Analysis and modeling of hysteresis of piezoelectric micro-actuator used in high precision dual-stage servo system. Control Theory Technol. 2015, 13, 184–203. [Google Scholar] [CrossRef]
- Pang, C.K.; Guo, G.; Chen, B.M.; Lee, T.H. Self-sensing actuation for nano-positioning and active-mode damping in dual-stage HDDs. IEEE/ASME Trans. Mechatron. 2006, 11, 328–338. [Google Scholar] [CrossRef]
- Guo, G.; Qi, H.; Low, T.S. A dual-stage control design for high track per inch hard disk drives. IEEE Trans. Magn. 2001, 37, 860–865. [Google Scholar]
- Lee, S.; Kim, Y.; Chung, C.C. Dual-stage actuator disk drives for improved servo performance: Track follow, track seek, and settle. IEEE Trans. Magn. 2001, 37, 1887–1890. [Google Scholar]
- Al-Mamun, A.; Mareels, I.; Lee, T.H.; Tay, A. Dual stage actuator control in hard disk drive-a review. In Proceedings of the 29th Annual Conference of the IEEE Industrial Electronics Society, Roanoke, VA, USA, 2–6 November 2003; pp. 2132–2137. [Google Scholar]
- Al-Mamun, A.; Suthasun, T.; Sri-Jayantha, S.M.; Lee, T.H. Multirate controller for dual actuated servomechanism in hard disk drive. Control Intell. Syst. 2007, 35, 32–43. [Google Scholar] [CrossRef]
- Nagel, W.S.; Clayton, G.M.; Leang, K.K. Master-slave control with hysteresis inversion for dual-stage nano-positioning systems. In Proceedings of the IEEE American Control Conference, Boston, MA, USA, 6–8 July 2016; pp. 655–660. [Google Scholar]
- Yu, S.; Li, Y.; Guo, L. Microactuator Servo Control During Self Writing of Servo Data. U.S. Patent 7,027,253, 11 April 2006. [Google Scholar]
- Rahman, M.A.; Al Mamun, A.; Yao, K.; Daud, Y. Discrete-time model predictive control for head-positioning servomechanism in a dual-stage hard disk drive. In Proceedings of the IEEE International Conference on Mechatronics and Automation, Tianjin, China, 3–6 August 2014; pp. 8–13. [Google Scholar]
- Wu, D.; Guo, I.G.; Chong, T.C. Analysis and comparison of resonance compensation in dual-stage actuation system of HDDs. In Proceedings of the IEEE American Control Conference, Arlington, VA, USA, 25–27 June 2001; pp. 3824–3829. [Google Scholar]
- Horsley, D.A.; Hernandez, D.; Horowitz, R.; Packard, A.K.; Pisano, A.P. Closed-loop control of a microfabricated actuator for dual-stage hard disk drive servo systems. In Proceedings of the IEEE American Control Conference, Philadelphia, PA, USA, 26 June 1998; pp. 3028–3032. [Google Scholar]
- Guo, W.; Weerasooriya, S.; Goh, G.B.; Li, Q.H.; Bi, C.; Chang, K.T.; Low, T.S. Dual stage actuators for high density rotating memory devices. IEEE Trans. Magn. 1998, 34, 450–455. [Google Scholar] [CrossRef]
- Hidehiko, N.; Tomizuka, M. Settling control and performance of a dual-actuator system for hard disk drives. IEEE/ASME Trans. Mechatron. 2003, 8, 431–438. [Google Scholar]
- Mike, S.; Miyake, K.; Kurita, M.; Tanaka, H.; Saegusa, S.; Robertson, N. Verification of thermally induced nanometer actuation of magnetic recording transducer to overcome mechanical and magnetic spacing challenges. IEEE Trans. Magn. 2005, 41, 4350–4352. [Google Scholar]
- Masayuki, K.; Xu, J.; Tokuyama, M.; Nakamoto, K.; Saegusa, S.; Maruyama, Y. Flying-height reduction of magnetic-head slider due to thermal protrusion. IEEE Trans. Magn. 2005, 41, 3007–3009. [Google Scholar]
- Song, S.; Wang, L.; Rudman, V.; Fang, D.; Stoev, K.; Wang, J.; Sun, B. Finite element analysis of alternating write-current-induced pole tip protrusion in magnetic recording heads. IEEE Trans. Magn. 2007, 43, 2217–2219. [Google Scholar] [CrossRef]
- Li, H.; Kurita, M.; Xu, J.; Yoshida, S. Iteration method for analysis of write-current-induced thermal protrusion. Microsyst. Technol. 2010, 16, 161. [Google Scholar] [CrossRef]
- Atsumi, T. Emerging technology for head-positioning system in HDDs. IEEJ J. Ind. Appl. 2016, 5, 117–122. [Google Scholar] [CrossRef]
- Atsumi, T. Flying-height and tracking-position controls with thermal-positioning actuator in hard disk drives. J. Adv. Mech. Des. Syst. Manuf. 2017, 11, JAMDSM0027. [Google Scholar] [CrossRef]
- Atsumi, T.; Suzuki, K.; Nakamura, S.; Ohta, M. Vibration control with thin-film-coil actuator for head-positioning system in hard disk drives. J. Adv. Mech. Des. Syst. Manuf. 2015, 9, JAMDSM0010. [Google Scholar] [CrossRef]
- Wit, D.; Canudas, C.; Olsson, H.; Astrom, K.J.; Lischinsky, P. A new model for control of systems with friction. IEEE Trans. Autom. Control 1995, 40, 419–425. [Google Scholar]
- Wit, D.; Canudas, C.; Olsson, H.; Astrom, K.J.; Lischinsky, P. Dynamic friction models and control design. In Proceedings of the IEEE American Control Conference, San Francisco, CA, USA, 2–4 June 1993; pp. 1920–1926. [Google Scholar]
- Mori, K.; Munemoto, T.; Otsuki, H.; Yamaguchi, Y.; Akagi, K. A dual-stage magnetic disk drive actuator using a piezoelectric device for a high track density. IEEE Trans. Magn. 1991, 27, 5298–5300. [Google Scholar] [CrossRef]
- Evans, R.B.; Griesbach, J.S.; Messner, W.C. Piezoelectric microactuator for dual stage control. IEEE Trans. Magn. 1999, 35, 977–982. [Google Scholar] [CrossRef]
- Yoshikazu, S.; Ichikawa, S.; Tsuna, T.; Sato, Y.; Sato, I. Piezoelectric piggy-back microactuator for hard disk drive. IEEE Trans. Magn. 1999, 35, 983–987. [Google Scholar]
- Hae-Joong, L.; Jeong, M.C. Apparatus and Method for Providing Axial Control Outside Impact Resistance of a Hard Disk Drive to Maintain a Constant Flying Height of a Head by Control of a Suspension. U.S. Patent 6,351,341, 26 February 2002. [Google Scholar]
- Chen, T.; Yamashita, T.T.; Lee, K.H.; Sakane, Y. Hard Disk Drive System Having Virtual Contact Recording. U.S. Patent 5,673,156, 30 September 1997. [Google Scholar]
- Lee, T.L. Thermal Compensated Head Positioner Servo for Disk Drive. U.S. Patent 5,128,813, 7 July 1992. [Google Scholar]
- Masaki, O.; Atsumi, T.; Otsuki, H.; Arisaka, T. Head-positioning control system using thermal actuator in hard disk drives. Microsyst. Technol. 2013, 19, 1483–1494. [Google Scholar]
- Gupta, B.K.; Young, K.; Chilamakuri, S.K.; Menon, A.K. On the thermal behavior of giant magnetoresistance heads. Trans. Am. Soc. Mech. Eng. J. Tribol. 2001, 123, 380–387. [Google Scholar] [CrossRef]
- Juang, J.Y.; Bogy, D.B. Air-bearing effects on actuated thermal pole-tip protrusion for hard disk drives. J. Tribol. 2007, 129, 570–578. [Google Scholar] [CrossRef]
- Masayuki, K.; Shiramatsu, T.; Miyake, K.; Kato, A.; Soga, M.; Tanaka, H.; Saegusa, S.; Suk, M. Active flying-height control slider using MEMS thermal actuator. Microsyst. Technol. 2006, 12, 369–375. [Google Scholar]
- Toshiya, S.; Kurita, M.; Miyake, K.; Suk, M.; Ohki, S.; Tanaka, H.; Saegusa, S. Drive integration of active flying-height control slider with micro thermal actuator. IEEE Trans. Magn. 2006, 42, 2513–2515. [Google Scholar]
- Hiroshi, F.; Hori, Y.; Kawamura, A. Perfect tracking control based on multirate feedforward control with generalized sampling periods. IEEE Trans. Ind. Electron. 2001, 48, 636–644. [Google Scholar]
- Chen, Y.Q.; Moore, K.L.; Yu, J.; Zhang, T. Iterative learning control and repetitive control in hard disk drive industry-a tutorial. In Proceedings of the IEEE Conference on Decision and Control, San Diego, CA, USA, 13–15 December 2006; pp. 2338–2351. [Google Scholar]
- Doh, T.Y.; Ryoo, J.R.; Chung, M.J. Design of a repetitive controller: An application to the track-following servo system of optical disk drives. IEE Proc. Control Theory Appl. 2006, 153, 323–330. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Controller | Rise Time (µs) | Settling Time (µs) | % Overshoot | Bandwidth (kHz) | Gain Margin (dB) | Phase Margin (Degree) |
|---|---|---|---|---|---|---|
| PI-PD-PID | 0.3592 | 1.732 | 18.4 | 699 | 202.9 | 60.4 |
| PD-PD-PID | ||||||
| PID-PD-PID |
| Open-Loop Cross-Over Freq. (fv) | Open-Loop Cross-Over Freq. (fm) | Rise Time (µs) | Settling Time (µs) | % Overshoot | Open-Loop Freq. (Hz) | Gain Margin (dB) | Phase Margin (Degree) |
|---|---|---|---|---|---|---|---|
| 1600 | 160.3 | 1700 | 12.3 | 1572 | 32.89 | 435.0 | |
| 400 | 1800 | 146.4 | 1727 | 11.1 | 1653 | 31.85 | 436.6 |
| 2000 | 137.0 | 1754 | 10.2 | 1915 | 30.92 | 435.7 | |
| 500 | 1600 | 146.8 | 1305 | 15.7 | 1572 | 32.89 | 429.1 |
| 1800 | 137.7 | 1325 | 14.1 | 1703 | 31.85 | 430.8 | |
| 2000 | 130.5 | 1344 | 12.9 | 1915 | 30.92 | 431.1 |
| fv (VCM) | fv (PZT) | fv (TPC) | Rise Time (µS) | Settling Time (µS) | % Overshoot | Open-Loop Bandwidth f0 (kHz) | Phase Margin (Degree) | Gain Margin (dB) |
|---|---|---|---|---|---|---|---|---|
| 400 | 1600 | 3000 | 89.69 | 1312 | 4.7 | 3671 | 79.90 | ∞ |
| 4000 | 81.22 | 1275 | 4.4 | 4136 | 82.77 | ∞ | ||
| 1800 | 3000 | 83.22 | 1332 | 6.0 | 3852 | 76.40 | ∞ | |
| 4000 | 75.88 | 1272 | 5.8 | 4290 | 78.90 | ∞ | ||
| 2000 | 3000 | 78.14 | 1341 | 7.2 | 4015 | 73.20 | ∞ | |
| 4000 | 71.69 | 1281 | 7.0 | 4356 | 75.20 | ∞ | ||
| 500 | 1600 | 3000 | 86.72 | 1026 | 6.8 | 3671 | 79.40 | ∞ |
| 4000 | 79.00 | 1001 | 6.5 | 4015 | 82.61 | ∞ | ||
| 1800 | 3000 | 81.09 | 1028 | 8.2 | 3852 | 76.00 | ∞ | |
| 4000 | 74.32 | 990.7 | 7.8 | 4225 | 79.30 | ∞ | ||
| 2000 | 3000 | 76.69 | 1024 | 9.4 | 4015 | 73.20 | ∞ | |
| 4000 | 70.61 | 988 | 8.9 | 4356 | 75.40 | ∞ |
| Controller Stage | Rise Time (µs) | Settling Time (µs) | Percentage Overshoot (%) | Bandwidth (kHz) | Phase Margin (Degree) | Gain Margin (dB) |
|---|---|---|---|---|---|---|
| Dual (using PID) | 0.3588 | 1.729 | 18.4 | 697 | 60.4 | 202.9 |
| Dual II (using others) | 130–160 | 1344–1700 | 12.3–12.9 | 1.572–1.915 | 431.1–435 | 30.92–32.89 |
| Triple I (using PID) | 0.3592 | 1.732 | 18.4 | 699 | 60.4 | 202.9 |
| Triple II (using others) | 71.69–89.69 | 1281–1312 | 4.7–7.0 | 3.671–4.356 | 75.2–79.9 | ∞ |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hossain, A.; Rahman, M.A. Comparative Analysis among Single-Stage, Dual-Stage, and Triple-Stage Actuator Systems Applied to a Hard Disk Drive Servo System. Actuators 2019, 8, 65. https://doi.org/10.3390/act8030065
Hossain A, Rahman MA. Comparative Analysis among Single-Stage, Dual-Stage, and Triple-Stage Actuator Systems Applied to a Hard Disk Drive Servo System. Actuators. 2019; 8(3):65. https://doi.org/10.3390/act8030065
Chicago/Turabian StyleHossain, Alamgir, and Md. Arifur Rahman. 2019. "Comparative Analysis among Single-Stage, Dual-Stage, and Triple-Stage Actuator Systems Applied to a Hard Disk Drive Servo System" Actuators 8, no. 3: 65. https://doi.org/10.3390/act8030065
APA StyleHossain, A., & Rahman, M. A. (2019). Comparative Analysis among Single-Stage, Dual-Stage, and Triple-Stage Actuator Systems Applied to a Hard Disk Drive Servo System. Actuators, 8(3), 65. https://doi.org/10.3390/act8030065