A Focus on Soft Actuation

1
Materials and Technology Center of Robotics, Empa‐ Swiss Federal Laboratories for Materials Science and
Technology, Überland Str. 129, 8600 Dübendorf, Switzerland
2
Aerial Robotics Lab, Imperial College London, South Kensington, London SW7 2AZ, UK
Actuators 2019, 8(4), 74; https://doi.org/10.3390/act8040074
Submission received: 9 October 2019
/
Accepted: 12 October 2019
/
Published: 23 October 2019
(This article belongs to the Special Issue New Materials and Designs for Soft Actuators)
Abstract
:The present editorial paper analyzes the hundred recent research works on soft actuation to understand the current main research focus in the light of the grand challenges in the field. Two characteristic paper types were obtained: one focuses on soft actuator design, manufacturing and demonstration, while another includes in addition the development of functional materials. Although vast majority of the works showcased soft actuation, evaluation of its robustness by multi-cyclic actuation was reported in less than 50% of the works, while only 10% described successful actuation for more than 1000 cycles. It is suggested that broadening the research focus to include investigation of mechanisms underlying the degradation of soft functional material performance in real cyclic actuation conditions, along with application of artificial intelligence methods for prediction of muscle behavior, may allow overcoming the reliability issues and developing robust soft-material actuators. The outcomes of the present work might be applicable to the entire soft robotics domain.
1. Introduction
Soft actuation remains one of the key challenges in the creation of nature-like soft, adaptive and collaborative robotics. Actuator materials and design play crucial role in development of soft actuation systems [1]. Functional materials may change their shape as a response to an external stimulus and thus exert (actuation) force, while proper designs may allow application of the force in desired directions, as well as maximizing the actuation strain. Special Issue on “New Materials and Designs for Soft Actuators” aimed at highlighting the latest research on materials and design “under the same roof” and facilitating the engineering of soft actuators with superior performance.
The research published in this Special Issue spans from theoretical [2,3,4,5,6,7] and applied [2,3,5,7,8,9] methods for actuator design to actuation materials [7] and showcasing of actuation systems [2,3,5,7,8,9]. For research contributions in the field, the main measure of success would be the new theoretical and practical knowledge allowing overcoming the challenges towards creation of robust, reliable soft actuation. To evaluate the impact of the current Special Issue and of the publications in the field in general, here I analyzed a hundred recent research papers on soft actuation. The main research focus areas and the contribution to actuation robustness were assessed for each analyzed work.
2. Results and Discussion
From the analysis of hundred recent research papers on soft actuation, the works’ contents may be classified into five main focus areas (see Table A1 in the Appendix A):
- Theory: theoretical work, including calculations, modelling and computer simulations;
- Materials: chemical synthesis and/or material development;
- Design: design of an actuator or actuation system;
- Manufacturing: fabrication/manufacturing of an actuator or an entire robot with an actuator;
- Demonstration: demonstration of an actuator prototype in one or several actuation scenarios and/or as a part of a robot.
An additional focus area, namely Artificial Intelligence (AI) and Computation, covering applications of AI techniques and advanced computational algorithms, is worth mentioning, despite the fact that only one paper [10] among the analyzed works on soft actuation has implemented AI. Using AI methods in soft actuation research will be discussed here in the further text.
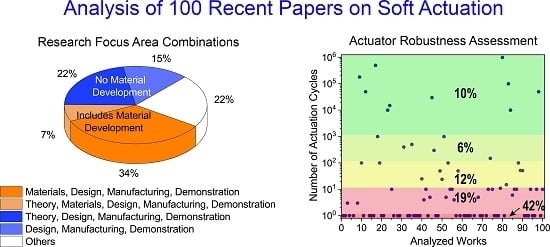
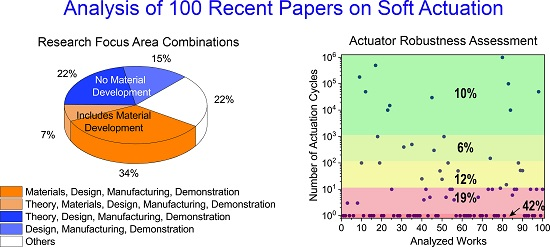
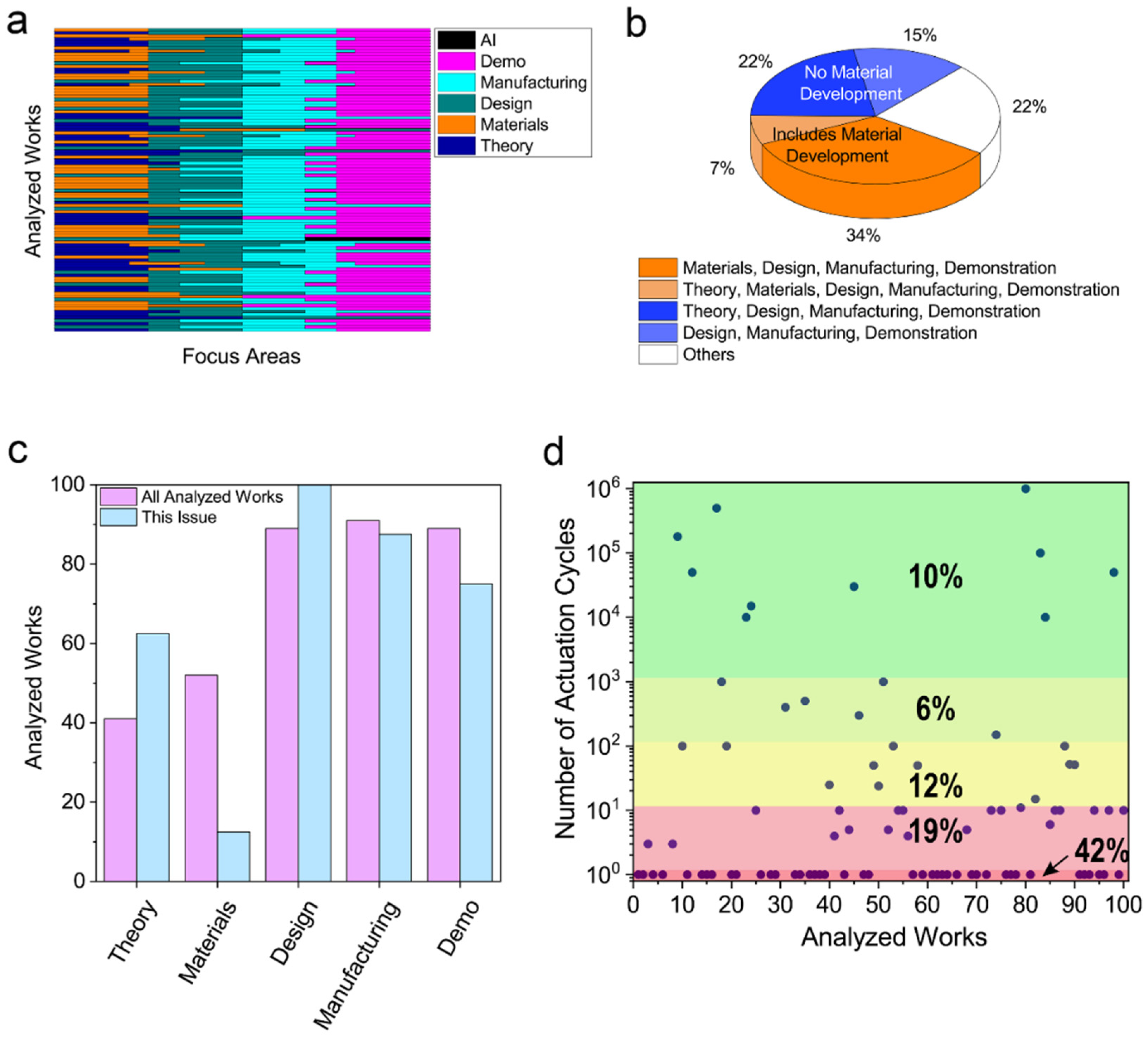
Figure 1a shows a color map of the analyzed works’ contents, reflecting combinations of multiple focus areas. It may be seen that all the works combine at least two focus areas. According to the combinations of focus areas (Figure 1b; Table A2 in the Appendix A), two typical paper structures were obtained. First deals with actuator design, its manufacturing and subsequent demonstration of an actuation scenario (37%; includes the following focus area combinations: Design, Manufacturing, Demonstration- 15%; Theory, Design, Manufacturing, Demonstration- 22%). The second type includes research on materials, covering the cycle from development of a functional material, through design and manufacturing of an actuator, to showcasing the actuation (41%; includes the following focus area combinations: Materials, Design, Manufacturing, Demonstration- 34%; Theory, Materials, Design, Manufacturing, Demonstration- 7%).
Compared to the general picture of research in the field, the works published in the current Special Issue on “New Materials and Designs for Soft Actuators” focus on actuator design rather than on material development (Figure 1c). As a result, the works did not focus on material testing or actuator performance characterization, and almost no robustness assessment by multi-cyclic actuation testing was performed. Multi-cyclic testing is one of the most important criterions in evaluation of soft actuators, showing their ability to retain the actuation behavior along multiple cycles and reflecting possible material degradation under real actuation conditions. However, the analysis of the recent research in the field shows that more than 50% of the published works show only up to one actuation cycle (11% did not demonstrate actuation, 42% showed one actuation cycle) (Figure 1d). It may be seen that about one fifth of the works demonstrated between two and ten actuation cycles (19%), 12% showed results in the range of 11 to 100 cycles, 6% included reports in the range of 101 to 1000 cycles, and only 10% of the works reported more than 1000 actuation cycles (see also Table A1 in the Appendix A).
Here it is suggested to broaden the research focus and include studies on robustness of functional materials for soft actuation in addition to development of new materials. Without any doubt, developing new stimuli-responsive materials is of a primary importance for the field. Simultaneously, improving the performance of existing promising material-actuators may lead to development of robust and highly reliable soft actuators, so lacking today. Although it may seem that improving the performance to meet specific requirements is a task of an industry, there is a broad number of related unanswered scientific questions, requiring the attention of the soft actuation community. It is necessary to understand the phenomena occurring during materials’ cyclic response to a stimulus, study the mechanisms of material degradation under continuous as well as interrupted actuation conditions, and explore the microstructure-synthesis-processing-composition-performance relations to overcome the limits of functional materials’ capacity and pave the way to durable and reliable soft actuation.
In addition, it is suggested to use computational methods, such as machine learning, for prediction of an actuator performance at any actuation cycle n. This method is expected to allow prediction of an actuator behavior without performing large number of complex and time-consuming multi-cycle actuation experiments. Instead, it will allow minimizing the amount of experiments to the amount required for training the computational algorithm. Determining the number of such experiments allowing successive prediction is one of the open research challenges.
Despite different target functionalities, main systems of the future soft intelligent robots, namely actuation, sensing and computation, will require similarity (or, at least, compatibility) of materials comprising them. Therefore, the challenges and suggested methods of their overcoming, mentioned above, are potentially applicable also for soft sensing and computation. Thus, the discussion and the outcomes of this paper might be relevant for the entire soft robotics domain.
3. Conclusions
Soft actuation research is strongly multidisciplinary and includes multiple focus areas. Focus area combinations form two main types of soft actuation research papers: the first includes the actuator design, its subsequent manufacturing and demonstration of actuation, while the second focuses on actuator material development (with subsequent actuator design, manufacturing and demonstration). Although the results showed large amount of works involving material development, the robustness and reliability of soft actuators remains one of the key challenges. Less than 50% of the analyzed works showed actuator robustness assessment using multi-cyclic actuation testing, while only 10% reported on actuators capable of working for more than a thousand actuation cycles. It was suggested that applying materials science expertise to understand and overcome the mechanisms of material degradation during multi-cyclic actuation in real conditions, as well as using artificial intelligence methods with minimal amount of multi-cyclic actuation experiments for prediction of the actuation performance might pave the way to development of reliable soft actuators.
4. Methods
An extensive bibliographic search was conducted to find recent published peer-reviewed journal papers on soft actuation (databases: Scopus, ScienceDirect, Web of Science, Google Scholar). The list of hundred allocated works, including the eight papers published in the special Actuators issue on “New Materials and Designs for Soft Actuators”, is provided in Appendix A. The works were analyzed by classification into focus areas and assessment of multi-cyclic actuation testing performance, including the number of the reported actuation cycles. It should be mentioned that the present communication might not include all the recent papers on soft actuation, as the performed bibliographic search could unintentionally miss them. Thus, the statistical data from this paper (such as percentage of works focusing on a specific area, a number of papers performing multi-cyclic tests, etc.) should not be taken as absolute quantitative results, but rather as a qualitative and/or semi-quantitative data allowing to describe the state of the art in the field.
Conflicts of Interest
The author declares no conflict of interest.
Appendix A

{kind=link}
{kind=link}
Table A1.
Focus areas in the analyzed works. The focus areas: Theory (theoretical work, including modelling and simulations), Materials (chemical synthesis and/or material development), Design, Manufacturing, Demonstration (of actuation), AI (artificial intelligence) and Computation. If the work focused on a specific area, the value for that focus area in the table will be “+”; if not- the cell in the table will remain empty. Additional rubric: “Number of actuation cycles” shows the number of actuation cycles reported in each analyzed work (peer-reviewed published journal papers).
Table A1.
Focus areas in the analyzed works. The focus areas: Theory (theoretical work, including modelling and simulations), Materials (chemical synthesis and/or material development), Design, Manufacturing, Demonstration (of actuation), AI (artificial intelligence) and Computation. If the work focused on a specific area, the value for that focus area in the table will be “+”; if not- the cell in the table will remain empty. Additional rubric: “Number of actuation cycles” shows the number of actuation cycles reported in each analyzed work (peer-reviewed published journal papers).
| No | Reference | Title | Theory | Materials | Design | Manufacturing | Demonstration of Actuation | AI & Computation | Number of Actuation Cycles |
|---|---|---|---|---|---|---|---|---|---|
| 1 | [2] | Shape Memory Polymer Composite Actuator: Modeling Approach for Preliminary Design and Validation | + | + | + | + | 1 | ||
| 2 | [8] | A Soft Master-Slave Robot Mimicking Octopus Arm Structure Using Thin Artificial Muscles and Wire Encoders | + | + | + | 1 | |||
| 3 | [3] | Mechanical Simplification of Variable-Stiffness Actuators Using Dielectric Elastomer Transducers | + | + | + | + | 3 | ||
| 4 | [9] | A Vacuum Powered Soft Textile-Based Clutch | + | + | + | 1 | |||
| 5 | [4] | Design of Soft Origami Mechanisms with Targeted Symmetries | + | + | 0 | ||||
| 6 | [5] | Force-Amplified Soft Electromagnetic Actuators | + | + | + | + | 1 | ||
| 7 | [6] | Directional Stiffness Control Through Geometric Patterning and Localized Heating of Field’s Metal Lattice Embedded in Silicone | + | + | + | 0 | |||
| 8 | [7] | Conductive Fabric Heaters for Heat-Activated Soft Actuators | + | + | + | + | 3 | ||
| 9 | [11] | Synthesis of solvent-free processable and on-demand cross-linkable dielectric elastomers for actuators | + | + | 1.8·105 | ||||
| 10 | [12] | A variable-stiffness tendril-like soft robot based on reversible osmotic actuation | + | + | + | + | 102 | ||
| 11 | [13] | Fast-Response, Stiffness-Tunable Soft Actuator by Hybrid Multimaterial 3D Printing | + | + | + | 1 | |||
| 12 | [14] | Artificial Muscles: Dielectric Elastomers Responsive to Low Voltages | + | + | 5·104 | ||||
| 13 | [15] | Soft Haptic Actuator Based on Knitted PVC Gel Fabric | + | + | + | 0 | |||
| 14 | [16] | Fabrication and modeling of dielectric elastomer soft actuator with 3D printed thermoplastic frame | + | + | + | + | 1 | ||
| 15 | [17] | Multimaterial 3D Printed Soft Actuators Powered by Shape Memory Alloy Wires | + | + | + | + | 1 | ||
| 16 | [18] | Digital logic for soft devices | + | + | + | 1 | |||
| 17 | [19] | High-Performance Hierarchical Black-Phosphorous-Based Soft Electrochemical Actuators in Bioinspired Applications | + | + | + | + | 5·105 | ||
| 18 | [20] | Addressable, Stretchable Heating Silicone Sheets | + | + | + | + | 103 | ||
| 19 | [21] | Long Shape Memory Alloy Tendon-based Soft Robotic Actuators and Implementation as a Soft Gripper | + | + | + | + | 102 | ||
| 20 | [22] | Sensorized, Flat, Pneumatic Artificial Muscle Embedded with Biomimetic Microfluidic Sensors for Proprioceptive Feedback | + | + | + | 1 | |||
| 21 | [23] | Butterfly proboscis-inspired tight rolling tapered soft actuators | + | + | + | + | 1 | ||
| 22 | [24] | Kinematics and statics of eccentric soft bending actuators with external payloads | + | + | + | 0 | |||
| 23 | [25] | Photothermal Bimorph Actuators with In-Built Cooler for Light Mills, Frequency Switches, and Soft Robots | + | + | + | + | + | 104 | |
| 24 | [26] | A soft ring oscillator | + | + | + | + | 1.5·104 | ||
| 25 | [27] | Janus Soft Actuators with On–Off Switchable Behaviors for Controllable Manipulation Driven by Oil | + | + | + | + | 10 | ||
| 26 | [28] | Reconfigurable soft body trajectories using unidirectionally stretchable composite laminae | + | + | + | + | 1 | ||
| 27 | [29] | Automatic Design of Soft Dielectric Elastomer Actuators With Optimal Spatial Electric Fields | + | + | + | 0 | |||
| 28 | [30] | A general soft robot module driven by twisted and coiled actuators | + | + | + | + | 1 | ||
| 29 | [31] | Selectively aligned cellulose nanofibers towards high-performance soft actuators | + | + | + | + | + | 1 | |
| 30 | [32] | Controllable kinematics of soft polymer actuators induced by interfacial patterning | + | + | + | 0 | |||
| 31 | [10] | Soft robot perception using embedded soft sensors and recurrent neural networks | + | + | + | 4·102 | |||
| 32 | [33] | Ionic Liquid Cation Size-Dependent Electromechanical Response of Ionic Liquid/Poly(vinylidene fluoride)-Based Soft Actuators | + | + | + | 0 | |||
| 33 | [34] | 3D-Printed Silicone Soft Architectures with Programmed Magneto-Capillary Reconfiguration | + | + | + | + | 1 | ||
| 34 | [35] | Harnessing the Day–Night Rhythm of Humidity and Sunlight into Mechanical Work Using Recyclable and Reprogrammable Soft Actuators | + | + | + | + | 1 | ||
| 35 | [36] | Durable liquid-crystalline vitrimer actuators | + | + | + | 5·102 | |||
| 36 | [37] | Sew-free anisotropic textile composites for rapid design and manufacturing of soft wearable robots | + | + | + | + | 1 | ||
| 37 | [38] | Transparent Soft Robots for Effective Camouflage | + | + | + | + | 1 | ||
| 38 | [39] | Design of physical user–robot interactions for model identification of soft actuators on exoskeleton robots | + | + | 1 | ||||
| 39 | [40] | Ultra-programmable buckling-driven soft cellular mechanisms | + | + | + | + | 1 | ||
| 40 | [41] | Molecularly-Engineered, 4D-Printed Liquid Crystal Elastomer Actuators | + | + | + | + | 2.5·101 | ||
| 41 | [42] | Ultrastrong and High-Stroke Wireless Soft Actuators through Liquid-Gas Phase Change | + | + | + | 4 | |||
| 42 | [43] | Performance enhancement of cellulose-based biocomposite ionic actuator by doping with MWCNT | + | + | 10 | ||||
| 43 | [44] | Efficiency of Origami-Based Vacuum Pneumatic Artificial Muscle for Off-Grid Operation | + | + | + | + | 1 | ||
| 44 | [45] | Pneumatic actuator and flexible piezoelectric sensor for soft virtual reality glove system | + | + | + | 5 | |||
| 45 | [46] | Deformable Ionic Polymer Artificial Mechanotransducer with an Interpenetrating Nanofibrillar Network | + | + | + | + | 3·104 | ||
| 46 | [47] | A Triboelectric Nanogenerator as a Self-Powered Sensor for a Soft–Rigid Hybrid Actuator | + | + | + | + | 3·102 | ||
| 47 | [48] | Mobile Liquid Gating Membrane System for Smart Piston and Valve Applications | + | + | + | 1 | |||
| 48 | [49] | Anisotropic and self-healing hydrogels with multi-responsive actuating capability | + | + | + | + | 1 | ||
| 49 | [50] | Thermo- and Photoresponsive Actuators with Freestanding Carbon Nitride Films | + | + | + | + | 5·101 | ||
| 50 | [51] | Large-Magnitude Transformable Liquid-Metal Composites | + | + | + | + | 2.4·101 | ||
| 51 | [52] | Multifunctional Soft Actuators Based on Anisotropic Paper/Polymer Bilayer Toward Bioinspired Applications | + | + | + | + | 103 | ||
| 52 | [53] | Bio-Inspired Soft Proboscis Actuator Driven by Dielectric Elastomer Fluid Transducers | + | + | + | 5 | |||
| 53 | [54] | Graphene-Based Bimorph Actuators with Dual-Response and Large-Deformation by a Simple Method | + | + | + | + | 102 | ||
| 54 | [55] | Electrically induced soft actuators based on thermoplastic polyurethane and their actuation performances including tiny force measurement | + | + | + | 10 | |||
| 55 | [56] | Programmable soft robotics based on nano-textured thermo-responsive actuators | + | + | + | + | 10 | ||
| 56 | [57] | A computationally efficient dynamical model of fluidic soft actuators and its experimental verification | + | + | + | 4 | |||
| 57 | [58] | Robotic Glove with Soft-Elastic Composite Actuators for Assisting Activities of Daily Living | + | + | + | + | 1 | ||
| 58 | [59] | An Easy-to-Implement Toolkit to Create Versatile and High-Performance HASEL Actuators for Untethered Soft Robots | + | + | + | + | 50 | ||
| 59 | [60] | Reachability Improvement of a Climbing Robot Based on Large Deformations Induced by Tri-Tube Soft Actuators | + | + | + | 1 | |||
| 60 | [61] | Modeling soft machines driven by buckling actuators | + | + | 0 | ||||
| 61 | [62] | A Fully Multi-Material Three-Dimensional Printed Soft Gripper with Variable Stiffness for Robust Grasping | + | + | + | 1 | |||
| 62 | [63] | 3D-Architected Soft Machines with Topologically Encoded Motion | + | + | + | + | 1 | ||
| 63 | [64] | Ionic Hydrogels with Biomimetic 4D-Printed Mechanical Gradients: Models for Soft-Bodied Aquatic Organisms | + | + | + | + | 1 | ||
| 64 | [65] | Soft Actuators with Stiffness and Shape Modulation Using 3D-Printed Conductive Polylactic Acid Material | + | + | + | + | 1 | ||
| 65 | [66] | 3D printing of structural gradient soft actuators by variation of bioinspired architectures | + | + | + | + | + | 0 | |
| 66 | [67] | Handedness-controlled and solvent-driven actuators with twisted fibers | + | + | + | + | 1 | ||
| 67 | [68] | Motion Simulation of Ionic Liquid Gel Soft Actuators Based on CPG Control | + | + | + | 0 | |||
| 68 | [69] | Design and Characterization of a Soft Robotic Therapeutic Glove for Rheumatoid Arthritis | + | + | + | 5 | |||
| 69 | [70] | Dynamic Morphological Computation Through Damping Design of Soft Continuum Robots | + | + | + | + | 1 | ||
| 70 | [71] | Pleated Film-Based Soft Twisting Actuator | + | + | + | 1 | |||
| 71 | [72] | Elastohydrodynamics of a pre-stretched finite elastic sheet lubricated by a thin viscous film with application to microfluidic soft actuators | + | + | 0 | ||||
| 72 | [73] | Multiple Inputs-Single Accumulated Output Mechanism for Soft Linear Actuators | + | + | + | + | 1 | ||
| 73 | [74] | Tough and electro-responsive hydrogel actuators with bidirectional bending behavior | + | + | + | + | 10 | ||
| 74 | [75] | Highly Dynamic Shape Memory Alloy Actuator for Fast Moving Soft Robots | + | + | + | 1.5·102 | |||
| 75 | [76] | Selective Decrosslinking in Liquid Crystal Polymer Actuators for Optical Reconfiguration of Origami and Light-Fueled Locomotion | + | + | + | + | 10 | ||
| 76 | [77] | Additive Manufacturing of Silicone Composites for Soft Actuation | + | + | + | + | 1 | ||
| 77 | [78] | The effect of gold electrode thicknesses on electromechanical performance of Nafion-based Ionic Polymer Metal Composite actuators | + | + | + | 1 | |||
| 78 | [79] | An Untethered Magnetic- and Light-Responsive Rotary Gripper: Shedding Light on Photoresponsive Liquid Crystal Actuators | + | + | + | + | 1 | ||
| 79 | [80] | Soft Somatosensitive Actuators via Embedded 3D Printing | + | + | + | + | 1.1·101 | ||
| 80 | [81] | Hydraulically amplified self-healing electrostatic actuators with muscle-like performance | + | + | + | + | 106 | ||
| 81 | [82] | 4D Printed Actuators with Soft-Robotic Functions | + | + | + | + | 1 | ||
| 82 | [83] | 3D printing of robotic soft actuators with programmable bioinspired architectures | + | + | + | + | + | 1.5·101 | |
| 83 | [84] | A soft, bistable valve for autonomous control of soft actuators | + | + | + | 105 | |||
| 84 | [85] | Biomimetic Color Changing Anisotropic Soft Actuators with Integrated Metal Nanowire Percolation Network Transparent Heaters for Soft Robotics | + | + | + | + | 104 | ||
| 85 | [86] | Soft Ultrathin Electronics Innervated Adaptive Fully Soft Robots | + | + | + | + | 6 | ||
| 86 | [87] | Rejuvenation of soft material–actuator | + | + | + | + | + | 10 | |
| 87 | [88] | Translucent soft robots driven by frameless fluid electrode dielectric elastomer actuators | + | + | + | + | 10 | ||
| 88 | [89] | 3D Printing of Liquid Crystal Elastomeric Actuators with Spatially Programed Nematic Order | + | + | + | + | 102 | ||
| 89 | [90] | Untethered soft robot capable of stable locomotion using soft electrostatic actuators | + | + | + | 5·101 | |||
| 90 | [91] | Functional properties of silicone/ethanol soft-actuator composites | + | + | + | + | 5·101 | ||
| 91 | [92] | All-soft material system for strong soft actuators | + | + | + | + | 1 | ||
| 92 | [93] | Miniature Soft Electromagnetic Actuators for Robotic Applications | + | + | + | + | 1 | ||
| 93 | [94] | Printing ferromagnetic domains for untethered fast-transforming soft materials | + | + | + | + | + | 1 | |
| 94 | [95] | Bioinspired Anisotropic Hydrogel Actuators with On-Off Switchable and Color-Tunable Fluorescence Behaviors | + | + | + | + | 10 | ||
| 95 | [96] | Programmable design of soft pneu-net actuators with oblique chambers can generate coupled bending and twisting motions | + | + | + | + | 1 | ||
| 96 | [97] | A digital light processing 3D printer for fast and high-precision fabrication of soft pneumatic actuators | + | + | + | + | 1 | ||
| 97 | [98] | A digital light processing 3D printer for fast and high-precision fabrication of soft pneumatic actuators | + | + | + | + | + | 10 | |
| 98 | [99] | Dielectric elastomer actuators with increased dielectric permittivity and low leakage current capable of suppressing electromechanical instability | + | + | 5·104 | ||||
| 99 | [100] | Soft Biomimetic Fish Robot Made of Dielectric Elastomer Actuators | + | + | + | + | 1 | ||
| 100 | [101] | Stretchable composite monolayer electrodes for low voltage dielectric elastomer actuators | + | + | + | + | 10 |
Table A2.
Focus area combinations.
| Focus Area Combination | Amount of Works, % |
|---|---|
| Materials, Design, Manufacturing, Demonstration | 34 |
| Theory, Design, Manufacturing, Demonstration | 22 |
| Design, Manufacturing, Demonstration | 15 |
| Theory, Materials, Design, Manufacturing, Demonstration | 7 |
| Theory, Design, Demonstration | 4 |
| Materials, Manufacturing, Demonstration | 3 |
| Materials, Demonstration | 3 |
| Materials, Design, Manufacturing | 2 |
| Theory, Design | 2 |
| Materials, Manufacturing | 2 |
| Theory, Materials, Manufacturing, Demonstration | 1 |
| Theory, Design, Manufacturing | 1 |
| Theory, Manufacturing, Demonstration | 1 |
| Theory, Materials, Design | 1 |
| Theory, Manufacturing, AI | 1 |
| Theory, Demonstration | 1 |
References
- Miriyev, A.; Stack, K.; Lipson, H. Soft material for soft actuators. Nat. Commun. 2017, 8, 596. [Google Scholar] [CrossRef]
- Ameduri, S.; Ciminello, M.; Concilio, A.; Quadrini, F.; Santo, L.; Ameduri, S.; Ciminello, M.; Concilio, A.; Quadrini, F.; Santo, L. Shape Memory Polymer Composite Actuator: Modeling Approach for Preliminary Design and Validation. Actuators 2019, 8, 51. [Google Scholar] [CrossRef]
- Allen, D.P.; Bolívar, E.; Farmer, S.; Voit, W.; Gregg, R.D.; Allen, D.P.; Bolívar, E.; Farmer, S.; Voit, W.; Gregg, R.D. Mechanical Simplification of Variable-Stiffness Actuators Using Dielectric Elastomer Transducers. Actuators 2019, 8, 44. [Google Scholar] [CrossRef]
- Gillman, A.; Wilson, G.; Fuchi, K.; Hartl, D.; Pankonien, A.; Buskohl, P.; Gillman, A.; Wilson, G.; Fuchi, K.; Hartl, D.; et al. Design of Soft Origami Mechanisms with Targeted Symmetries. Actuators 2018, 8, 3. [Google Scholar] [CrossRef]
- Doerger, S.; Harnett, C. Force-Amplified Soft Electromagnetic Actuators. Actuators 2018, 7, 76. [Google Scholar] [CrossRef]
- Allen, E.; Swensen, J.; Allen, E.A.; Swensen, J.P. Directional Stiffness Control Through Geometric Patterning and Localized Heating of Field’s Metal Lattice Embedded in Silicone. Actuators 2018, 7, 80. [Google Scholar] [CrossRef]
- Cartolano, M.; Xia, B.; Miriyev, A.; Lipson, H. Conductive Fabric Heaters for Heat-Activated Soft Actuators. Actuators 2019, 8, 9. [Google Scholar] [CrossRef]
- Furukawa, S.; Wakimoto, S.; Kanda, T.; Hagihara, H.; Furukawa, S.; Wakimoto, S.; Kanda, T.; Hagihara, H. A Soft Master-Slave Robot Mimicking Octopus Arm Structure Using Thin Artificial Muscles and Wire Encoders. Actuators 2019, 8, 40. [Google Scholar] [CrossRef]
- Sadeghi, A.; Mondini, A.; Mazzolai, B.; Sadeghi, A.; Mondini, A.; Mazzolai, B. A Vacuum Powered Soft Textile-Based Clutch. Actuators 2019, 8, 47. [Google Scholar] [CrossRef]
- Thuruthel, T.G.; Shih, B.; Laschi, C.; Tolley, M.T. Soft robot perception using embedded soft sensors and recurrent neural networks. Sci. Robot. 2019, 4, eaav1488. [Google Scholar] [CrossRef]
- Caspari, P.; Nüesch, F.A.; Opris, D.M. Synthesis of solvent-free processable and on-demand cross-linkable dielectric elastomers for actuators. J. Mater. Chem. C 2019, 7, 12139–12150. [Google Scholar] [CrossRef]
- Must, I.; Sinibaldi, E.; Mazzolai, B. A variable-stiffness tendril-like soft robot based on reversible osmotic actuation. Nat. Commun. 2019, 10, 344. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Zhang, N.; Hingorani, H.; Ding, N.; Wang, D.; Yuan, C.; Zhang, B.; Gu, G.; Ge, Q. Fast-Response, Stiffness-Tunable Soft Actuator by Hybrid Multimaterial 3D Printing. Adv. Funct. Mater. 2019, 29, 1806698. [Google Scholar] [CrossRef]
- Sheima, Y.; Caspari, P.; Opris, D.M. Artificial Muscles: Dielectric Elastomers Responsive to Low Voltages. Macromol. Rapid Commun. 2019, 40, 1900205. [Google Scholar] [CrossRef]
- Park, W.-H.; Shin, E.-J.; Yoo, Y.; Choi, S.; Kim, S.-Y. Soft Haptic Actuator Based on Knitted PVC Gel Fabric. IEEE Trans. Ind. Electron. 2019, 67, 677–685. [Google Scholar] [CrossRef]
- Zhou, F.; Zhang, M.; Cao, X.; Zhang, Z.; Chen, X.; Xiao, Y.; Liang, Y.; Wong, T.-W.; Li, T.; Xu, Z. Fabrication and modeling of dielectric elastomer soft actuator with 3D printed thermoplastic frame. Sens. Actuators A Phys. 2019, 292, 112–120. [Google Scholar] [CrossRef]
- Akbari, S.; Sakhaei, A.H.; Panjwani, S.; Kowsari, K.; Serjouei, A.; Ge, Q. Multimaterial 3D Printed Soft Actuators Powered by Shape Memory Alloy Wires. Sens. Actuators A Phys. 2019, 290, 177–189. [Google Scholar] [CrossRef] [Green Version]
- Preston, D.J.; Rothemund, P.; Jiang, H.J.; Nemitz, M.P.; Rawson, J.; Suo, Z.; Whitesides, G.M. Digital logic for soft devices. Proc. Natl. Acad. Sci. USA 2019, 116, 7750–7759. [Google Scholar] [CrossRef] [Green Version]
- Wu, G.; Wu, X.; Xu, Y.; Cheng, H.; Meng, J.; Yu, Q.; Shi, X.; Zhang, K.; Chen, W.; Chen, S. High-Performance Hierarchical Black-Phosphorous-Based Soft Electrochemical Actuators in Bioinspired Applications. Adv. Mater. 2019, 31, 1806492. [Google Scholar] [CrossRef]
- Bilodeau, R.A.; Yuen, M.C.; Kramer-Bottiglio, R. Addressable, Stretchable Heating Silicone Sheets. Adv. Mater. Technol. 2019, 4, 1900276. [Google Scholar] [CrossRef]
- Lee, J.-H.; Chung, Y.S.; Rodrigue, H. Long Shape Memory Alloy Tendon-based Soft Robotic Actuators and Implementation as a Soft Gripper. Sci. Rep. 2019, 9, 11251. [Google Scholar] [CrossRef]
- Wirekoh, J.; Valle, L.; Pol, N.; Park, Y.-L. Sensorized, Flat, Pneumatic Artificial Muscle Embedded with Biomimetic Microfluidic Sensors for Proprioceptive Feedback. Soft Robot. 2019. [Google Scholar] [CrossRef]
- Sol, J.A.H.P.; Peeketi, A.R.; Vyas, N.; Schenning, A.P.H.J.; Annabattula, R.K.; Debije, M.G. Butterfly proboscis-inspired tight rolling tapered soft actuators. Chem. Commun. 2019, 55, 1726–1729. [Google Scholar] [CrossRef] [Green Version]
- Yang, C.; Kang, R.; Branson, D.T.; Chen, L.; Dai, J.S. Kinematics and statics of eccentric soft bending actuators with external payloads. Mech. Mach. Theory 2019, 139, 526–541. [Google Scholar] [CrossRef]
- Li, J.; Zhang, R.; Mou, L.; Jung de Andrade, M.; Hu, X.; Yu, K.; Sun, J.; Jia, T.; Dou, Y.; Chen, H.; et al. Photothermal Bimorph Actuators with In-Built Cooler for Light Mills, Frequency Switches, and Soft Robots. Adv. Funct. Mater. 2019, 29, 1808995. [Google Scholar] [CrossRef]
- Preston, D.J.; Jiang, H.J.; Sanchez, V.; Rothemund, P.; Rawson, J.; Nemitz, M.P.; Lee, W.-K.; Suo, Z.; Walsh, C.J.; Whitesides, G.M. A soft ring oscillator. Sci. Robot. 2019, 4, eaaw5496. [Google Scholar] [CrossRef]
- Song, Y.; Liu, Y.; Jiang, H.; Xue, J.; Yu, Z.; Li, S.; Han, Z.; Ren, L. Janus Soft Actuators with On–Off Switchable Behaviors for Controllable Manipulation Driven by Oil. ACS Appl. Mater. Interfaces 2019, 11, 13742–13751. [Google Scholar] [CrossRef]
- Kim, S.Y.; Baines, R.; Booth, J.; Vasios, N.; Bertoldi, K.; Kramer-Bottiglio, R. Reconfigurable soft body trajectories using unidirectionally stretchable composite laminae. Nat. Commun. 2019, 10, 3464. [Google Scholar] [CrossRef]
- Chen, F.; Liu, K.; Wang, Y.; Zou, J.; Gu, G.; Zhu, X. Automatic Design of Soft Dielectric Elastomer Actuators With Optimal Spatial Electric Fields. IEEE Trans. Robot. 2019, 35, 1150–1165. [Google Scholar] [CrossRef]
- Tang, X.; Li, K.; Liu, Y.; Zhou, D.; Zhao, J. A general soft robot module driven by twisted and coiled actuators. Smart Mater. Struct. 2019, 28, 035019. [Google Scholar] [CrossRef]
- Kuang, Y.; Chen, C.; Cheng, J.; Pastel, G.; Li, T.; Song, J.; Jiang, F.; Li, Y.; Zhang, Y.; Jang, S.-H.; et al. Selectively aligned cellulose nanofibers towards high-performance soft actuators. Extrem. Mech. Lett. 2019, 29, 100463. [Google Scholar] [CrossRef]
- Tan, H.; Liang, S.; Yu, X.; Song, X.; Huang, W.; Zhang, L. Controllable kinematics of soft polymer actuators induced by interfacial patterning. J. Mater. Chem. C 2019, 7, 5410–5417. [Google Scholar] [CrossRef]
- Correia, D.M.; Barbosa, J.C.; Costa, C.M.; Reis, P.M.; Esperança, J.M.S.S.; De Zea Bermudez, V.; Lanceros-Méndez, S. Ionic Liquid Cation Size-Dependent Electromechanical Response of Ionic Liquid/Poly(vinylidene fluoride)-Based Soft Actuators. J. Phys. Chem. C 2019, 123, 12744–12752. [Google Scholar] [CrossRef]
- Roh, S.; Okello, L.B.; Golbasi, N.; Hankwitz, J.P.; Liu, J.A.-C.; Tracy, J.B.; Velev, O.D. 3D-Printed Silicone Soft Architectures with Programmed Magneto-Capillary Reconfiguration. Adv. Mater. Technol. 2019, 4, 1800528. [Google Scholar] [CrossRef]
- Chen, Q.; Qian, X.; Xu, Y.; Yang, Y.; Wei, Y.; Ji, Y. Harnessing the Day–Night Rhythm of Humidity and Sunlight into Mechanical Work Using Recyclable and Reprogrammable Soft Actuators. ACS Appl. Mater. Interfaces 2019, 11, 29290–29297. [Google Scholar] [CrossRef]
- Chen, Q.; Li, Y.; Yang, Y.; Xu, Y.; Qian, X.; Wei, Y.; Ji, Y. Durable liquid-crystalline vitrimer actuators. Chem. Sci. 2019, 10, 3025–3030. [Google Scholar] [CrossRef] [Green Version]
- Connolly, F.; Wagner, D.A.; Walsh, C.J.; Bertoldi, K. Sew-free anisotropic textile composites for rapid design and manufacturing of soft wearable robots. Extrem. Mech. Lett. 2019, 27, 52–58. [Google Scholar] [CrossRef]
- Li, P.; Wang, Y.; Gupta, U.; Liu, J.; Zhang, L.; Du, D.; Foo, C.C.; Ouyang, J.; Zhu, J. Transparent Soft Robots for Effective Camouflage. Adv. Funct. Mater. 2019, 29, 1901908. [Google Scholar] [CrossRef]
- Hamaya, M.; Matsubara, T.; Teramae, T.; Noda, T.; Morimoto, J. Design of physical user–robot interactions for model identification of soft actuators on exoskeleton robots. Int. J. Robot. Res. 2019. [Google Scholar] [CrossRef]
- Janbaz, S.; Bobbert, F.S.L.; Mirzaali, M.J.; Zadpoor, A.A. Ultra-programmable buckling-driven soft cellular mechanisms. Mater. Horizons 2019, 6, 1138–1147. [Google Scholar] [CrossRef] [Green Version]
- Saed, M.O.; Ambulo, C.P.; Kim, H.; De, R.; Raval, V.; Searles, K.; Siddiqui, D.A.; Cue, J.M.O.; Stefan, M.C.; Shankar, M.R.; et al. Molecularly-Engineered, 4D-Printed Liquid Crystal Elastomer Actuators. Adv. Funct. Mater. 2019, 29, 1806412. [Google Scholar] [CrossRef]
- Boyvat, M.; Vogt, D.M.; Wood, R.J. Ultrastrong and High-Stroke Wireless Soft Actuators through Liquid-Gas Phase Change. Adv. Mater. Technol. 2019, 4, 1800381. [Google Scholar] [CrossRef]
- Yang, L.; Sun, Z.; Li, F.; Du, S.; Song, W. Performance enhancement of cellulose-based biocomposite ionic actuator by doping with MWCNT. Appl. Phys. A 2019, 125, 547. [Google Scholar] [CrossRef]
- Lee, J.-G.; Rodrigue, H. Efficiency of Origami-Based Vacuum Pneumatic Artificial Muscle for Off-Grid Operation. Int. J. Precis. Eng. Manuf. Technol. 2019, 6, 789–797. [Google Scholar] [CrossRef]
- Song, K.; Kim, S.H.; Jin, S.; Kim, S.; Lee, S.; Kim, J.-S.; Park, J.-M.; Cha, Y. Pneumatic actuator and flexible piezoelectric sensor for soft virtual reality glove system. Sci. Rep. 2019, 9, 8988. [Google Scholar] [CrossRef]
- Kim, S.Y.; Kim, Y.; Cho, C.; Choi, H.; Park, H.W.; Lee, D.; Heo, E.; Park, S.; Lee, H.; Kim, D.H. Deformable Ionic Polymer Artificial Mechanotransducer with an Interpenetrating Nanofibrillar Network. ACS Appl. Mater. Interfaces 2019, 11, 29350–29359. [Google Scholar] [CrossRef]
- Chen, J.; Chen, B.; Han, K.; Tang, W.; Wang, Z.L. A Triboelectric Nanogenerator as a Self-Powered Sensor for a Soft–Rigid Hybrid Actuator. Adv. Mater. Technol. 2019, 4, 1900337. [Google Scholar] [CrossRef]
- Liu, W.; Wang, M.; Sheng, Z.; Zhang, Y.; Wang, S.; Qiao, L.; Hou, Y.; Zhang, M.; Chen, X.; Hou, X. Mobile Liquid Gating Membrane System for Smart Piston and Valve Applications. Ind. Eng. Chem. Res. 2019, 58, 11976–11984. [Google Scholar] [CrossRef]
- Qin, H.; Zhang, T.; Li, N.; Cong, H.-P.; Yu, S.-H. Anisotropic and self-healing hydrogels with multi-responsive actuating capability. Nat. Commun. 2019, 10, 2202. [Google Scholar] [CrossRef]
- Cai, Z.; Song, Z.; Guo, L. Thermo- and Photoresponsive Actuators with Freestanding Carbon Nitride Films. ACS Appl. Mater. Interfaces 2019, 11, 12770–12776. [Google Scholar] [CrossRef]
- Wang, H.; Yao, Y.; Wang, X.; Sheng, L.; Yang, X.-H.; Cui, Y.; Zhang, P.; Rao, W.; Guo, R.; Liang, S.; et al. Large-Magnitude Transformable Liquid-Metal Composites. ACS Omega 2019, 4, 2311–2319. [Google Scholar] [CrossRef]
- Hu, Y.; Xu, A.; Liu, J.; Yang, L.; Chang, L.; Huang, M.; Gu, W.; Wu, G.; Lu, P.; Chen, W.; et al. Multifunctional Soft Actuators Based on Anisotropic Paper/Polymer Bilayer Toward Bioinspired Applications. Adv. Mater. Technol. 2019, 4, 1800674. [Google Scholar] [CrossRef]
- Lin, P.-W.; Liu, C.-H.; Lin, P.-W.; Liu, C.-H. Bio-Inspired Soft Proboscis Actuator Driven by Dielectric Elastomer Fluid Transducers. Polymers 2019, 11, 142. [Google Scholar] [CrossRef]
- Chang, L.; Huang, M.; Qi, K.; Jing, Z.; Yang, L.; Lu, P.; Hu, Y.; Wu, Y. Graphene-Based Bimorph Actuators with Dual-Response and Large-Deformation by a Simple Method. Macromol. Mater. Eng. 2019, 304, 1800688. [Google Scholar] [CrossRef]
- Li, C.; Xia, H.; Yao, J.; Ni, Q.-Q. Electrically induced soft actuators based on thermoplastic polyurethane and their actuation performances including tiny force measurement. Polymer 2019, 180, 121678. [Google Scholar] [CrossRef]
- Kang, D.J.; An, S.; Yarin, A.L.; Anand, S. Programmable soft robotics based on nano-textured thermo-responsive actuators. Nanoscale 2019, 11, 2065–2070. [Google Scholar] [CrossRef]
- Wang, T.; Zhang, Y.; Zhu, Y.; Zhu, S. A computationally efficient dynamical model of fluidic soft actuators and its experimental verification. Mechatronics 2019, 58, 1–8. [Google Scholar] [CrossRef]
- Heung, K.H.L.; Tong, R.K.Y.; Lau, A.T.H.; Li, Z. Robotic Glove with Soft-Elastic Composite Actuators for Assisting Activities of Daily Living. Soft Robot. 2019, 6, 289–304. [Google Scholar] [CrossRef]
- Mitchell, S.K.; Wang, X.; Acome, E.; Martin, T.; Ly, K.; Kellaris, N.; Venkata, V.G.; Keplinger, C. An Easy-to-Implement Toolkit to Create Versatile and High-Performance HASEL Actuators for Untethered Soft Robots. Adv. Sci. 2019, 6, 1900178. [Google Scholar] [CrossRef]
- Kanada, A.; Giardina, F.; Howison, T.; Mashimo, T.; Iida, F. Reachability Improvement of a Climbing Robot Based on Large Deformations Induced by Tri-Tube Soft Actuators. Soft Robot. 2019, 6, 483–494. [Google Scholar] [CrossRef]
- Wang, G.; Li, M.; Zhou, J. Modeling soft machines driven by buckling actuators. Int. J. Mech. Sci. 2019, 157–158, 662–667. [Google Scholar] [CrossRef]
- Zhu, M.; Mori, Y.; Wakayama, T.; Wada, A.; Kawamura, S. A Fully Multi-Material Three-Dimensional Printed Soft Gripper with Variable Stiffness for Robust Grasping. Soft Robot. 2019, 6, 507–519. [Google Scholar] [CrossRef]
- Goswami, D.; Liu, S.; Pal, A.; Silva, L.G.; Martinez, R.V. 3D-Architected Soft Machines with Topologically Encoded Motion. Adv. Funct. Mater. 2019, 29, 1808713. [Google Scholar] [CrossRef]
- McCracken, J.M.; Rauzan, B.M.; Kjellman, J.C.E.; Su, H.; Rogers, S.A.; Nuzzo, R.G. Ionic Hydrogels with Biomimetic 4D-Printed Mechanical Gradients: Models for Soft-Bodied Aquatic Organisms. Adv. Funct. Mater. 2019, 29, 1806723. [Google Scholar] [CrossRef]
- Al-Rubaiai, M.; Pinto, T.; Qian, C.; Tan, X. Soft Actuators with Stiffness and Shape Modulation Using 3D-Printed Conductive Polylactic Acid Material. Soft Robot. 2019, 6, 318–332. [Google Scholar] [CrossRef]
- Ren, L.; Li, B.; Song, Z.; Liu, Q.; Ren, L.; Zhou, X. 3D printing of structural gradient soft actuators by variation of bioinspired architectures. J. Mater. Sci. 2019, 54, 6542–6551. [Google Scholar] [CrossRef]
- Fang, B.; Xiao, Y.; Xu, Z.; Chang, D.; Wang, B.; Gao, W.; Gao, C. Handedness-controlled and solvent-driven actuators with twisted fibers. Mater. Horizons 2019, 6, 1207–1214. [Google Scholar] [CrossRef]
- Zhang, C.; He, B.; Ding, A.; Xu, S.; Wang, Z.; Zhou, Y. Motion Simulation of Ionic Liquid Gel Soft Actuators Based on CPG Control. Comput. Intell. Neurosci. 2019, 2019, 8256723. [Google Scholar] [CrossRef]
- Chua, M.C.H.; Lim, J.H.; Yeow, R.C.H. Design and Characterization of a Soft Robotic Therapeutic Glove for Rheumatoid Arthritis. Assist. Technol. 2019, 31, 44–52. [Google Scholar] [CrossRef]
- Di Lallo, A.; Catalano, M.G.; Garabini, M.; Grioli, G.; Gabiccini, M.; Bicchi, A. Dynamic Morphological Computation Through Damping Design of Soft Continuum Robots. Front. Robot. AI 2019, 6, 23. [Google Scholar] [CrossRef]
- Ahn, C.H.; Wang, W.; Jung, J.; Rodrigue, H. Pleated Film-Based Soft Twisting Actuator. Int. J. Precis. Eng. Manuf. 2019, 20, 1149–1158. [Google Scholar] [CrossRef]
- Boyko, E.; Eshel, R.; Gommed, K.; Gat, A.D.; Bercovici, M. Elastohydrodynamics of a pre-stretched finite elastic sheet lubricated by a thin viscous film with application to microfluidic soft actuators. J. Fluid Mech. 2019, 862, 732–752. [Google Scholar] [CrossRef] [Green Version]
- Cho, K.H.; Kim, H.M.; Kim, Y.; Yang, S.Y.; Choi, H.R. Multiple Inputs-Single Accumulated Output Mechanism for Soft Linear Actuators. J. Mech. Robot. 2018, 11, 011007. [Google Scholar] [CrossRef]
- Jiang, H.; Fan, L.; Yan, S.; Li, F.; Li, H.; Tang, J. Tough and electro-responsive hydrogel actuators with bidirectional bending behavior. Nanoscale 2019, 11, 2231–2237. [Google Scholar] [CrossRef]
- Huang, X.; Kumar, K.; Jawed, M.K.; Mohammadi Nasab, A.; Ye, Z.; Shan, W.; Majidi, C. Highly Dynamic Shape Memory Alloy Actuator for Fast Moving Soft Robots. Adv. Mater. Technol. 2019, 4, 1800540. [Google Scholar] [CrossRef]
- Jiang, Z.-C.; Xiao, Y.-Y.; Tong, X.; Zhao, Y. Selective Decrosslinking in Liquid Crystal Polymer Actuators for Optical Reconfiguration of Origami and Light-Fueled Locomotion. Angew. Chem. Int. Ed. 2019, 58, 5332–5337. [Google Scholar] [CrossRef]
- Miriyev, A.; Xia, B.; Joseph, J.C.; Lipson, H. Additive Manufacturing of Silicone Composites for Soft Actuation. 3D Print Addit. Manuf. 2019, in press. [Google Scholar]
- Yilmaz, O.C.; Sen, I.; Gurses, B.O.; Ozdemir, O.; Cetin, L.; Sarıkanat, M.; Seki, Y.; Sever, K.; Altinkaya, E. The effect of gold electrode thicknesses on electromechanical performance of Nafion-based Ionic Polymer Metal Composite actuators. Compos. Part B Eng. 2019, 165, 747–753. [Google Scholar] [CrossRef]
- Pilz da Cunha, M.; Foelen, Y.; Raak, R.J.H.; Murphy, J.N.; Engels, T.A.P.; Debije, M.G.; Schenning, A.P.H.J. An Untethered Magnetic- and Light-Responsive Rotary Gripper: Shedding Light on Photoresponsive Liquid Crystal Actuators. Adv. Opt. Mater. 2019, 7, 1801643. [Google Scholar] [CrossRef]
- Truby, R.L.; Wehner, M.; Grosskopf, A.K.; Vogt, D.M.; Uzel, S.G.M.; Wood, R.J.; Lewis, J.A. Soft Somatosensitive Actuators via Embedded 3D Printing. Adv. Mater. 2018, 30, 1706383. [Google Scholar] [CrossRef]
- Acome, E.; Mitchell, S.K.; Morrissey, T.G.; Emmett, M.B.; Benjamin, C.; King, M.; Radakovitz, M.; Keplinger, C. Hydraulically amplified self-healing electrostatic actuators with muscle-like performance. Science 2018, 359, 61–65. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- López-Valdeolivas, M.; Liu, D.; Broer, D.J.; Sánchez-Somolinos, C. 4D Printed Actuators with Soft-Robotic Functions. Macromol. Rapid Commun. 2018, 39, 1700710. [Google Scholar] [CrossRef] [PubMed]
- Schaffner, M.; Faber, J.A.; Pianegonda, L.; Rühs, P.A.; Coulter, F.; Studart, A.R. 3D printing of robotic soft actuators with programmable bioinspired architectures. Nat. Commun. 2018, 9, 878. [Google Scholar] [CrossRef] [PubMed]
- Rothemund, P.; Ainla, A.; Belding, L.; Preston, D.J.; Kurihara, S.; Suo, Z.; Whitesides, G.M. A soft, bistable valve for autonomous control of soft actuators. Sci. Robot. 2018, 3, eaar7986. [Google Scholar] [CrossRef]
- Kim, H.; Lee, H.; Ha, I.; Jung, J.; Won, P.; Cho, H.; Yeo, J.; Hong, S.; Han, S.; Kwon, J.; et al. Biomimetic Color Changing Anisotropic Soft Actuators with Integrated Metal Nanowire Percolation Network Transparent Heaters for Soft Robotics. Adv. Funct. Mater. 2018, 28, 1801847. [Google Scholar] [CrossRef]
- Wang, C.; Sim, K.; Chen, J.; Kim, H.; Rao, Z.; Li, Y.; Chen, W.; Song, J.; Verduzco, R.; Yu, C. Soft Ultrathin Electronics Innervated Adaptive Fully Soft Robots. Adv. Mater. 2018, 30, 1706695. [Google Scholar] [CrossRef]
- Miriyev, A.; Trujillo, C.; Caires, G.; Lipson, H. Rejuvenation of soft material—Actuator. MRS Commun. 2018, 8, 556–561. [Google Scholar] [CrossRef]
- Christianson, C.; Goldberg, N.N.; Deheyn, D.D.; Cai, S.; Tolley, M.T. Translucent soft robots driven by frameless fluid electrode dielectric elastomer actuators. Sci. Robot. 2018, 3, eaat1893. [Google Scholar] [CrossRef] [Green Version]
- Kotikian, A.; Truby, R.L.; Boley, J.W.; White, T.J.; Lewis, J.A. 3D Printing of Liquid Crystal Elastomeric Actuators with Spatially Programed Nematic Order. Adv. Mater. 2018, 30, 1706164. [Google Scholar] [CrossRef]
- Cao, J.; Qin, L.; Liu, J.; Ren, Q.; Foo, C.C.; Wang, H.; Lee, H.P.; Zhu, J. Untethered soft robot capable of stable locomotion using soft electrostatic actuators. Extrem. Mech. Lett. 2018, 21, 9–16. [Google Scholar] [CrossRef]
- Miriyev, A.; Caires, G.; Lipson, H. Functional properties of silicone/ethanol soft-actuator composites. Mater. Des. 2018, 145, 232–242. [Google Scholar] [CrossRef]
- Bilodeau, R.A.; Miriyev, A.; Lipson, H.; Kramer-Bottiglio, R. All-soft material system for strong soft actuators. In Proceedings of the 2018 IEEE International Conference on Soft Robotics (RoboSoft), Livorno, Italy, 24–28 April 2018; pp. 288–294. [Google Scholar]
- Do, T.N.; Phan, H.; Nguyen, T.-Q.; Visell, Y. Miniature Soft Electromagnetic Actuators for Robotic Applications. Adv. Funct. Mater. 2018, 28, 1800244. [Google Scholar] [CrossRef]
- Kim, Y.; Yuk, H.; Zhao, R.; Chester, S.A.; Zhao, X. Printing ferromagnetic domains for untethered fast-transforming soft materials. Nature 2018, 558, 274–279. [Google Scholar] [CrossRef] [PubMed]
- Ma, C.; Lu, W.; Yang, X.; He, J.; Le, X.; Wang, L.; Zhang, J.; Serpe, M.J.; Huang, Y.; Chen, T. Bioinspired Anisotropic Hydrogel Actuators with On-Off Switchable and Color-Tunable Fluorescence Behaviors. Adv. Funct. Mater. 2018, 28, 1704568. [Google Scholar] [CrossRef]
- Wang, T.; Ge, L.; Gu, G. Programmable design of soft pneu-net actuators with oblique chambers can generate coupled bending and twisting motions. Sens. Actuators A Phys. 2018, 271, 131–138. [Google Scholar] [CrossRef]
- Ge, L.; Dong, L.; Wang, D.; Ge, Q.; Gu, G. A digital light processing 3D printer for fast and high-precision fabrication of soft pneumatic actuators. Sens. Actuators A Phys. 2018, 273, 285–292. [Google Scholar] [CrossRef]
- Haghiashtiani, G.; Habtour, E.; Park, S.-H.; Gardea, F.; McAlpine, M.C. 3D printed electrically-driven soft actuators. Extrem. Mech. Lett. 2018, 21, 1–8. [Google Scholar] [CrossRef]
- Caspari, P.; Dünki, S.J.; Nüesch, F.A.; Opris, D.M. Dielectric elastomer actuators with increased dielectric permittivity and low leakage current capable of suppressing electromechanical instability. J. Mater. Chem. C 2018, 6, 2043–2053. [Google Scholar] [CrossRef]
- Shintake, J.; Cacucciolo, V.; Shea, H.; Floreano, D. Soft Biomimetic Fish Robot Made of Dielectric Elastomer Actuators. Soft Robot. 2018, 5, 466–474. [Google Scholar] [CrossRef] [Green Version]
- Ji, X.; El Haitami, A.; Sorba, F.; Rosset, S.; Nguyen, G.T.M.; Plesse, C.; Vidal, F.; Shea, H.R.; Cantin, S. Stretchable composite monolayer electrodes for low voltage dielectric elastomer actuators. Sens. Actuators B Chem. 2018, 261, 135–143. [Google Scholar] [CrossRef]
Figure 1.
Analysis of hundred recent research works on Soft Actuation: (a) Main focus areas for each work- a color map; (b) Main focus area combinations, forming two main research paper types: one focuses on design, manufacturing and demonstration, while another includes also materials development; (c) Amount of works focusing on a specific area; for the Special issue and for all the analyzed works; (d) Number of reported actuation cycles for each work.
Figure 1.
Analysis of hundred recent research works on Soft Actuation: (a) Main focus areas for each work- a color map; (b) Main focus area combinations, forming two main research paper types: one focuses on design, manufacturing and demonstration, while another includes also materials development; (c) Amount of works focusing on a specific area; for the Special issue and for all the analyzed works; (d) Number of reported actuation cycles for each work.

© 2019 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Miriyev, A. A Focus on Soft Actuation. Actuators 2019, 8, 74. https://doi.org/10.3390/act8040074
AMA Style
Miriyev A. A Focus on Soft Actuation. Actuators. 2019; 8(4):74. https://doi.org/10.3390/act8040074
Chicago/Turabian StyleMiriyev, Aslan. 2019. "A Focus on Soft Actuation" Actuators 8, no. 4: 74. https://doi.org/10.3390/act8040074
APA StyleMiriyev, A. (2019). A Focus on Soft Actuation. Actuators, 8(4), 74. https://doi.org/10.3390/act8040074
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.