1. Introduction
Pump-control of hydraulic actuators is a promising technology offering several advantages over traditional valve-controlled systems. By connecting a hydraulic pump directly to the actuator, its velocity may be controlled by varying either the speed of the prime mover, the displacement of the pump, or a combination of both [
1]. This eliminates the need for throttling of the hydraulic fluid, allowing energy efficiencies superior to that of conventional valve-controlled systems [
2,
3]. This also facilities the construction of compact electrohydraulic drives, combining the advantages of electrical actuation (e.g., energy efficiency, plug-and-play functionality and no external piping) with those of the hydraulic actuation (e.g., long service life, high force availability and good overload protection) [
2,
3,
4].
A common requirement in industrial applications is the use of single-rod cylinders. This results in different flows into, and out of, the cylinder, which must be handled for proper operation of the actuator. Several solutions exist, involving either, the use of multiple pumps or auxiliary valves [
5,
6,
7,
8]. Conceptually, the simplest solution involves a switching valve arrangement that connects one of the cylinder chambers to a hydraulic reservoir, displacing the differential flow to and from the reservoir as the actuator is operated. A simple and cost-efficient circuit enabling four-quadrant operation utilizing a shuttle valve to realize this function was introduced by Hewett [
9], followed by a circuit utilizing pilot operated check valves (POCVs) by Rahmfeld and Ivantysynova [
10]. In both cases, the differential flow is compensated by monitoring the pressures of the actuator and connecting the cylinder chamber with the lowest pressure to the reservoir, see
Figure 1 [
11]. These solutions have, however, shown to exhibit unstable behavior. Under certain operating conditions, the switching valve arrangement may oscillate, reversing its connections rapidly, even for a constant input (i.e., constant velocity of the electric motor, or displacement of the pump). This results in oscillations of the pressures and velocity of the actuator, which may lead to reduced performance and loss of control over the actuator [
8,
9,
10]. This phenomenon is commonly referred to as
mode switching, first described by Williamson and Ivantysynova [
12]. Alternative solutions, using multiple pumps to handle the differential flow, does not result in mode switching [
11]; however, a solution utilizing a single pump is more attractive with regards to compactness and system cost. For this reason, much research effort has been devoted to investigating the causes and potential solutions for mode switching in single-pump circuits, a review of which is presented in the following.
Williamson and Ivantysynova first reported mode switching while lowering light loads at high velocity [
12], then later for large inertia loads subjected to low external forces [
13]. Feedforward control of the actuator pressures, by means of a predictive observer was proposed, however later found to be an insufficient solution [
13].
A numerical analysis using a simplified nonlinear model was presented in [
13], studying inertia loads from 1 to 20 ton. Approximate stability thresholds were derived based on the study, and mode switching was shown to increase for increasing inertias and lower damping. The use of pressure feedback was proposed, and shown to be capable of stabilizing the actuator for the operating conditions considered. Michel and Weber demonstrated that mode switching may result from subjecting large inertia loads to high accelerations, and derived the limit for the maximum acceleration that may be safely applied [
11]. Pressure feedback was reported to be capable of increasing this limit [
11]. A mathematical analysis was presented in [
14], where it was shown that instability may occur at low load conditions.
The introduction of leakage to dampen mode switching oscillations by means of two auxiliary hydraulic valves was proposed in [
14], and shown to prevent mode switching for the operating conditions investigated using a load of 143 kg. A more detailed analysis was presented by Caliskan et al. by also including the dynamics of the switching valve arrangement, which had previously been treated as an ideal switching element. Using linearized analysis, the presence of unstable equilibrium points was demonstrated. The introduction of leakage without auxiliary valves was proposed using an underlapped shuttle valve and shown to provide stable operation up to certain retraction speeds [
15,
16]. The effects of friction and line losses were studied in [
17] and shown to alter the regions of stable and unstable operation. Stabilization of the actuator by means of throttling only during critical operating conditions (i.e., low load conditions) was studied in [
17,
18], and shown to improve performance while preserving high energy efficiency.
All of the research reviewed so far concerns solution utilizing the valve switching strategy of connecting the lowest cylinder chamber pressure to the reservoir. Although improvements have been made, every proposed solution has suffered from performance issues and instability under some operating conditions [
19,
20]. These solutions have typically been analyzed based on a quadrant division plotting the velocity of the actuator on the vertical axis versus the external force on the horizontal axis. Recently, Costa and Sepehri analyzed the problem from a different perspective by introducing a new quadrant division. Rather than using the external force, the force due to the hydraulic pressures, referred to here as
the hydraulic force , was used on the horizontal axis [
19]:
where
and
are the piston- and rod-side pressures, and
and
are the piston- and rod-side areas. It was shown that previous quadrant divisions do not accurately describe the operating quadrants of the cylinder, and this was proposed as an explanation for why previous attempts of solving the problem of mode switching have failed. A new valve switching strategy, based on the direction of the hydraulic force, was proposed and implemented hydraulically by means of a pressure intensifier. Experimental results controlling a load of 367 kg were presented with stable four-quadrant operation demonstrated for the operating conditions investigated [
19,
20]. This is the most recently proposed control strategy for single-pump circuits and is referred to here as the
steady-state switching law (SSL).
This paper concerns the stability and control of simple-pump circuits utilizing switching strategies based on the new quadrant division of Costa and Sepehri. First, the stability of a pump-controlled single-rod cylinder using the SSL is investigated in detail. It is demonstrated theoretically and numerically that mode switching may still occur under some operating conditions using the SSL. A theoretical analysis is provided that explains the underlying mechanisms of this behavior. Based on the analysis, a novel switching strategy is proposed and investigated. A number of operating conditions are presented in which the use of the SSL leads to mode switching in varying degrees, with the most severe cases resulting in loss of control over the actuator. It is demonstrated that neither artificial damping nor filtering of the hydraulic force prevents mode switching using the SSL under these conditions. Operating conditions leading to mode switching are presented for both low and high load conditions, as well as low and high velocities, for a load of 2000 kg. The same simulations are then repeated using the proposed control strategy, with stable behavior free of mode switching demonstrated for all these operating conditions. Finally, stable behavior, free of mode switching, is demonstrated using the proposed strategy for a wide range of external loading.
The rest of the paper is organized as follows:
Section 2 describes the system under consideration and its mathematical model. In
Section 3, the possibility of mode switching using the SSL is demonstrated and analyzed. A novel control strategy is proposed in
Section 4, with numerical results presented in
Section 5.
Section 6 concludes the paper with a summary of the findings.
3. Theoretical Analysis
This section demonstrates the possibility of mode switching in pump-controlled single-rod cylinders when controlled using the SSL. For this purpose, consider the circuit of
Figure 2, with
and
positive (resistant load). Assuming steady-state conditions (constant
,
and
),
> 0, and therefore
is energized while
is closed. For the sake of clarity of presentation, friction is omitted for the remainder of the analysis. In steady-state,
and the cylinder pressures balance according to:
Next, consider an abrupt reversal of the external force. From Equations (1) and (8), a switch of the valves will be required. Under these conditions, for the proper operation free of mode switching, the valves must switch only once. If a second switch occurs, a third switch will also be required by necessity before reaching steady-state, meaning that mode switching will take place with a minimum of three switches. Thus, the occurrence of a second switch may be used to demonstrate the presence of mode switching, which is utilized in the following.
Assuming
before the switch,
must decrease to
after the valves switch, whereas
must increase to fulfill Equation (8). During this transition, from the SSL and the definition of the hydraulic force, the valves will switch a second time if
, with
defined as:
This switching condition may be illustrated graphically as in
Figure 3, where the pressure
is shown (solid line) along with the switching threshold
(dashed line). The valve switching process may be divided into four distinct stages, numbered one through four in
Figure 3.
During the first stage (
), the system is in steady-state with:
At
, the external force changes direction, which marks the onset of the second stage. As a result,
and thus also
will decrease, until
reaches
and the valves switch for the first time. The third stage (
) is a transient stage, where both
and
must approach their final steady-state values, given by:
During the fourth stage (
), the system is again in steady-state with
and
as described by Equations (12) and (13). Note that for
,
is negative, which is why
, as indicated in
Figure 3. The transient responses of
and
during the third stage determine whether or not a second switch, and thus mode switching, takes place. If
at any point after
, a second switch will take place and mode switching will occur with a minimum of three switches. The third switch occurs for
, after which several set of switches may occur again if the condition
becomes fulfilled before reaching steady-state. Referring to
Figure 3, this corresponds to an intersection between the curves of
and
.
Observe from (11) that
as
, and thus both
and
must increase by necessity after the valves switch the first time at
. If the gradient of
is less than
, and the response is well-damped, the situation will resemble that of
Figure 4a. In this case, the curves never intersect for
, and mode switching does not occur. However, if the gradient of
is greater than
, the curves will intersect and mode switching will occur with a minimum of three switches. If the gradient of
remains greater than
after the third switch, a series of switches may be initiated with the curves overlapping until
. The situation will then resemble that of
Figure 4b, where the curves overlap in the region indicated by the green circle. In this paper, this is referred to as
type 1 mode switching.
Even in the absence of type 1 mode switching, the curves may intersect at some point during if the response of is underdamped, or the mass oscillates (thus causing to oscillate as well). This type of behavior will be referred to here as type 2 mode switching.
These three possible scenarios are demonstrated numerically in the following using the model developed in the previous section. Starting at steady-state with
,
,
,
, ideal (infinitely fast) valves, and the remainder of the system parameters as presented in
Section 5, an abrupt change in
from
to
at
is simulated and plotted in
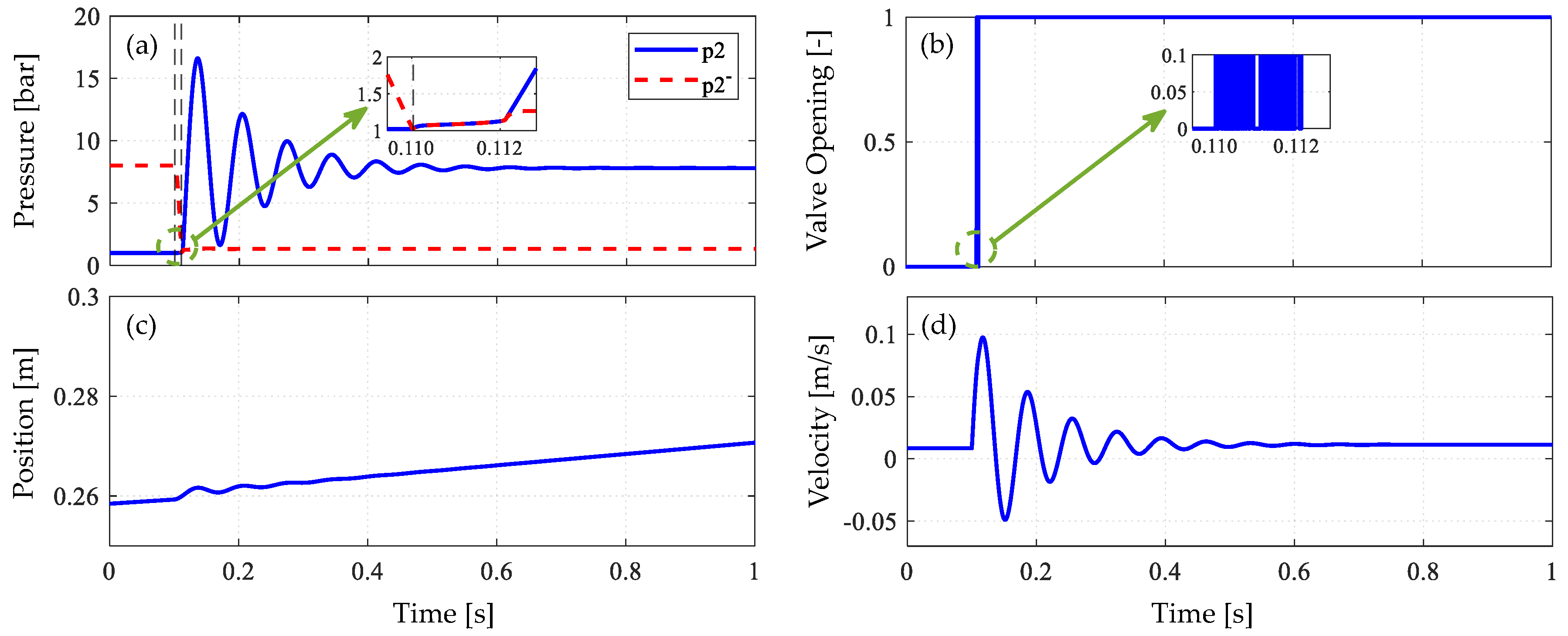
Figure 5.
Figure 5a shows the response of
along with the switching threshold
, and
Figure 5b shows the state of the
valve, where 1 indicates an open valve and 0 indicates the valve being closed. The response of the second valve,
is identical in shape but reversed. The position and velocity of the actuator are given in
Figure 5c,d, respectively. In
Figure 5a, the external force changes direction at the time indicated by the first dashed horizontal line, whereas the second dashed horizontal line indicates the time when the valves switch for the first time. As seen in
Figure 5a, for these system parameters and operating conditions,
and
never intersect after the valves switch the first time, and thus mode switching does not take place.
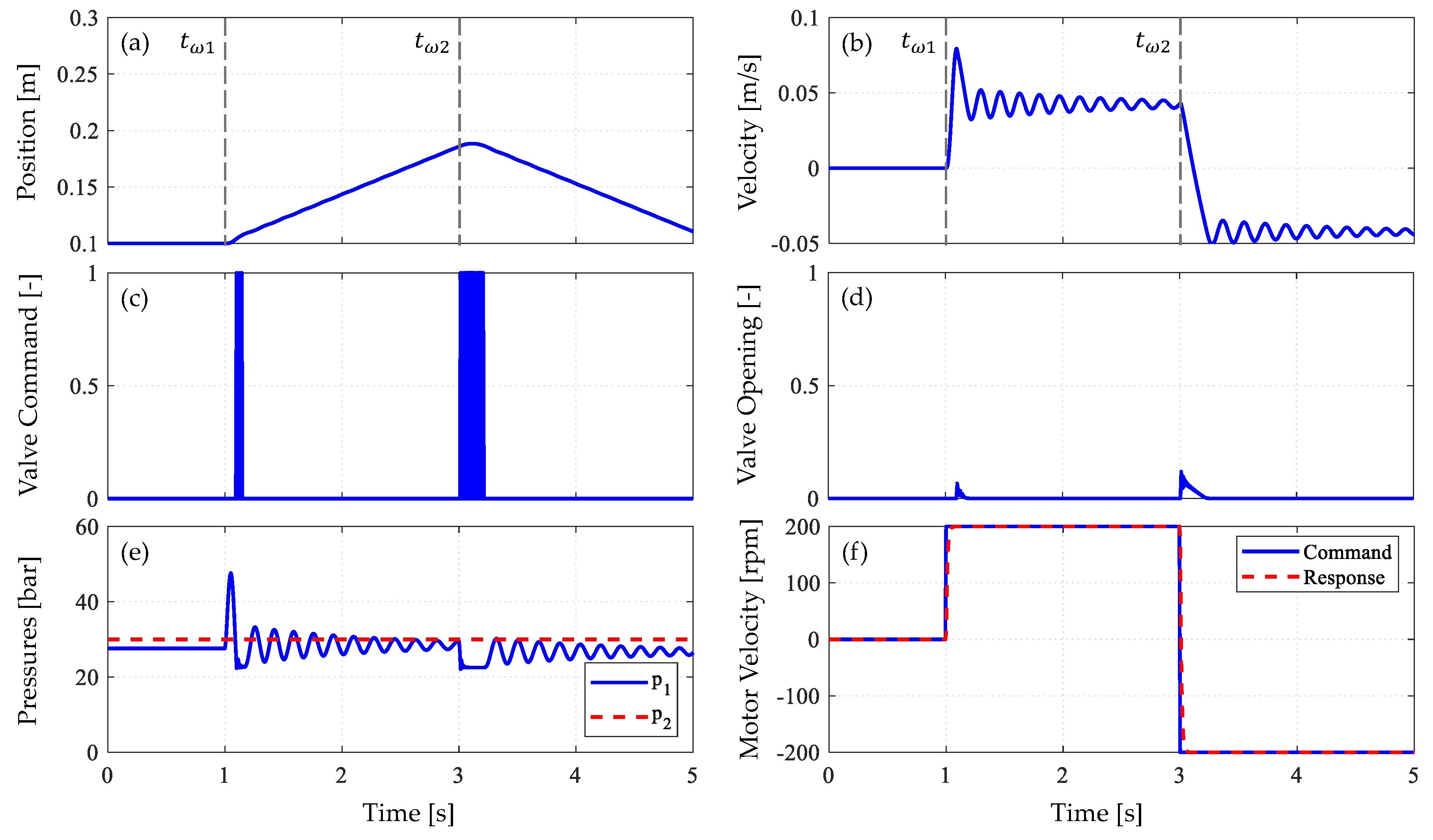
Next, the simulation is repeated with
. As seen in
Figure 6a, under these conditions the curves intersect continuously for a short period of time after the valves switch for the first time, leading to a series of switches, as seen in
Figure 6b, demonstrating type 1 mode switching. During this short time period, using ideal valves and a simulation step time of
, a total of 49 switches take place.
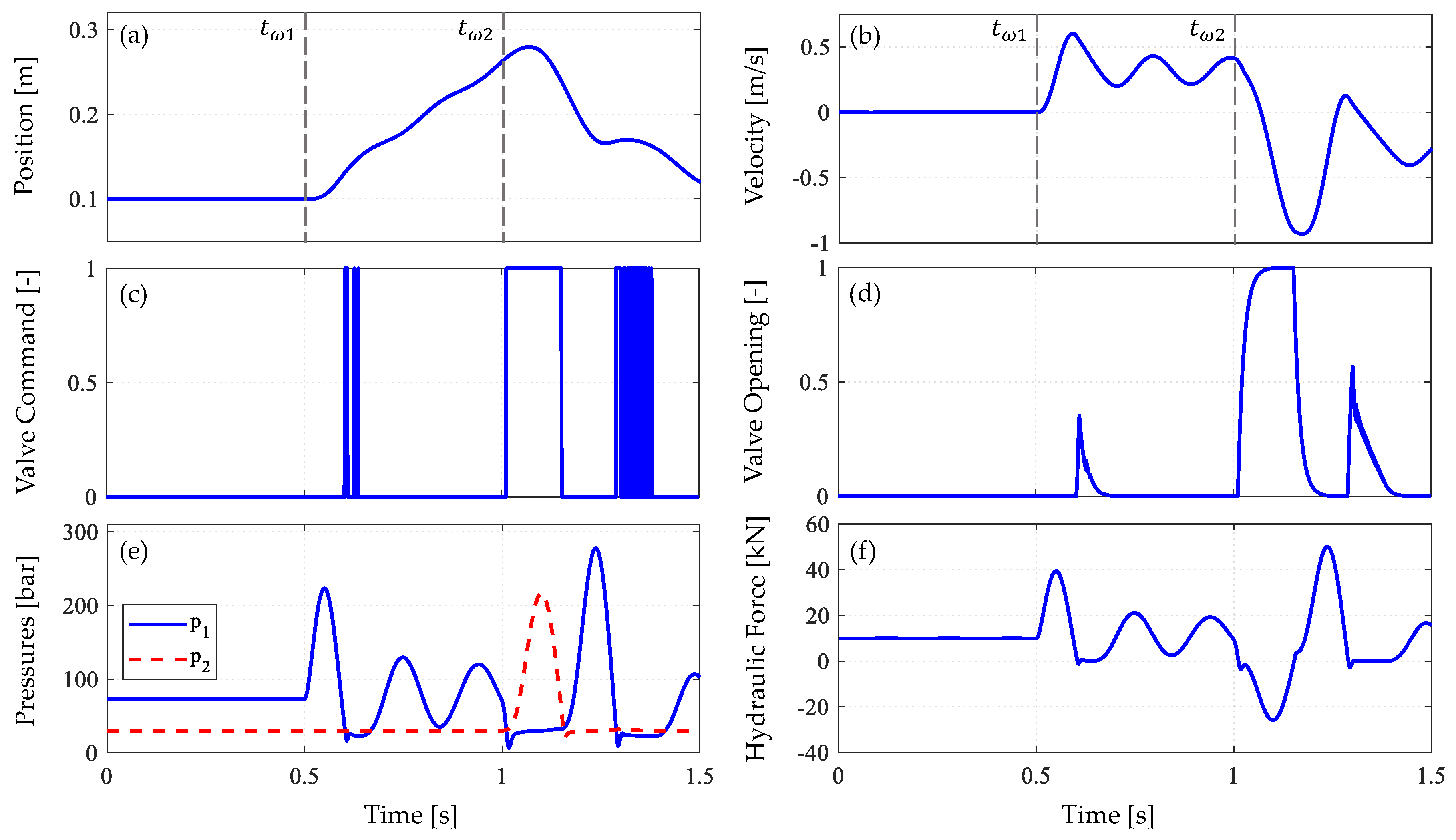
Repeating the simulation with a mass of
, the results plotted in
Figure 7a–d are obtained. Under these conditions type 1 mode switching occurs for a longer period of time after the initial valve switch, followed by a type 2 mode switch at approximately
. Type 1 and type 2 mode switching then occur consecutively for the remainder of the simulation with a total of 23479 switches taking place. The effect of this mode switching on the position and velocity of the actuator is clear from
Figure 7c,d, where both the position and velocity are observed to oscillate. Obviously, this is not an acceptable type of behavior.
The analysis presented here was conducted using an abrupt change in the external force. This represents the worst-case scenario, and may also represent an abrupt acceleration or deceleration of the actuator, which is investigated in
Section 5.
The results of the analysis may be summarized as follows:
Although, the SSL provides the correct operating quadrant and steady-state behavior, mode switching may occur under certain operating conditions due to dynamic considerations. Additionally, two distinct types of mode switching have been identified, referred to here as type 1 and type 2.
The salient feature of type 1 mode switching is a continuous series of high-frequency valve switches, and its occurrence depends upon the gradients of the cylinder pressures. This type of mode switching may thus occur even if the pressures of the system are well damped.
If the pressures are not well-damped, any factor causing either cylinder chamber pressure to oscillate (such as oscillations of the mass ) may result in a series of low-frequency switches, which has been defined here as type 2 mode switching.
4. Novel Control Strategy
4.1. Conceptual Development
Referring to the summary of the previous section: regarding the third point, damping of the pressures or filtering of
is likely to be beneficial. The former may be achieved by introducing leakage or artificial damping (e.g., acceleration or pressure feedback), whereas the latter may be easily implemented in software when using an electrohydraulic valve implementation. Regarding the second point however, neither damping nor filtering are expected to resolve type 1 mode switching, and therefore an alternative solution is developed here. Both artificial damping and filtering of
will, however, be evaluated in
Section 5, along with the control strategy to be developed in this section.
From its definition, the hydraulic force is observed to be comprised of the following components, which in turn dictate whether or not a valve switch is commanded at any given time:
which are numbered here as one through five and defined as: (1)
: the external force, (2)
: forces from commanded accelerations by adjusting the velocity command sent to the electric motor, (3)
: frictional forces, (4)
: forces arising from transient pressure changes as a result of a previous valve switch, (5)
: forces due to oscillations of the mass
.
The analysis presented in the previous section indicates that reacting to the fourth and fifth components is not desirable as it may lead to type 1, and type 2 mode switching, respectively. With this in mind, the
modified hydraulic force is introduced and defined as:
The control strategy proposed here is to continuously calculate an estimate of the modified hydraulic force, denoted , by means of an observer, and command valve switches based on rather than . This should eliminate mode switching, however as a result the system may experience transiently a valve connection which is considered incorrect according to the SSL and its predecessor, in particular near . The effects of having such a connection, referred to here as a reverse connection, is therefore investigated in the following before concluding the development of the proposed strategy.
Referring to
Figure 2, assuming steady-state conditions and
positive,
should be energized with
deenergized according to the SSL. Reversing the connections,
while
is given by Equation (8) as:
From Equation (16) it is seen that as long as the following condition is fulfilled:
having a reverse connection will not lead to cavitation and thus control over the actuator is retained. From Equation (17) it is seen that by increasing the accumulator pressure
, the system remains controllable with a reverse connection for larger
. For the system under consideration with parameters as given in
Section 5 and an accumulator pressure of
, it is found by rearranging Equation (16) that the system can tolerate a reverse connection for up to
for positive
(
energized), and down to
for negative
(
energized). Increasing the accumulator pressure to
, these limits increase to
and
, respectively. The same deduction applies to
for transient behavior.
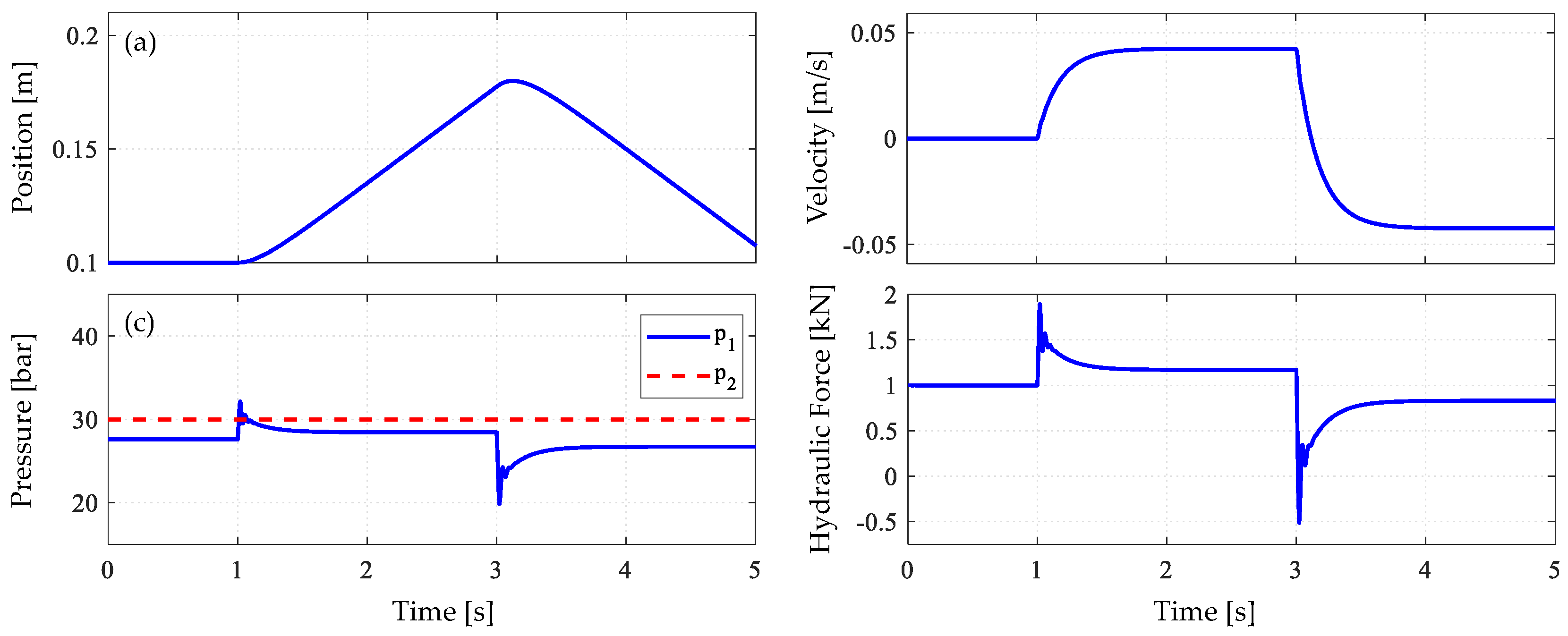
This is verified numerically in
Figure 8, where the system is simulated with
for
,
,
for
,
and an external force
.
Figure 8a–c show the position, velocity and pressures of the system with constant valve openings
and
for the entire duration of the simulation.
Figure 8d shows the hydraulic force, which is seen to be positive except for a short period of time during
.
Under these conditions, the system maintains a reverse connection for the entire simulation except for the short time period where
becomes negative. Despite the reverse connection, the system does not cavitate and remains both controllable and well behaved. The same simulation is repeated in
Figure 9, however with
and
, providing the system with a reverse connection only transiently near
. Although the position and velocity response of the actuator differ slightly from that of
Figure 8, the system remains controllable, well behaved and free of cavitation.
Continuing with the development, the proposed strategy involves ensuring a certain minimum pressure of the hydraulic reservoir, taken here as
, which may be realized using an appropriately sized hydraulic accumulator as the reservoir. For a compact cylinder drive, this is not common practice, where typically much lower accumulator pressures are used (e.g.,
) [
21]. As a result, some changes in the hydraulic topology are required. For variable-displacement drives however, the use of a low-pressure line with a pressure of e.g.,
is already common practice in order to supply the servo valve controlling the displacement of the hydraulic unit from the same line. Increasing the accumulator pressure also improves the stiffness of the actuator, leading to more favorable dynamics. However, the force capability of the actuator is also reduced, and thus, selecting the accumulator pressure level constitutes a tradeoff [
22].
Although maintaining a constant set of valve opening leads to an appropriate behavior free of mode switching under these conditions, as soon as goes outside the limits calculated from Equation (16) with inserted for , the system will cavitate and a switch of the valves is required to maintain control over the actuator. Switching the valves at points close to these limits is not a feasible control strategy as this would introduce large pressure shocks into the system. Switching of the valves should therefore, take place near close to (e.g., ). The proposed control strategy may then be summarized as follows: (1) Implement the system with an appropriate pressure . (2) Estimate the modified hydraulic force using an observer. (3). For , energize , for , energize
4.2. Implementation
The implementation of the proposed strategy is realized as follows:
In this manner, the fourth component (transient pressure behavior due to valve switches) of Equation (14) no longer affects the switching of the valves. The effects of the fifth component (mass oscillations) are then eliminated by introducing a strong acceleration feedback with a feedback gain in the virtual system.
Additionally, in order to ensure that the virtual system closely follows the desired velocity of the true system, a velocity feedback with a feedback gain of
is introduced in the virtual system. The set point of this velocity feedback is calculated by estimating the desired velocity of the true system based on a filtered version of the velocity command sent to the electric motor,
, as:
where
is the velocity reference, and the average values of the cylinder areas have been used as the velocity gain of the true system is a function of
with
is energized, while a function of
when
is energized. For filtering of the velocity command, a first-order filter with a time constant of
is utilized. Lastly, in order to prevent valve switches from minor fluctuations in
when
remains close to zero, a fixed valve configuration (
and
= 0) is maintained whenever
enters a certain threshold value
, which is deactivated again when
. To avoid oscillation between these two modes of operation, referred to here as
fixed behavior, and
virtual behavior, respectively,
is selected as
.
An overview of the virtual system is shown in
Figure 10, where
is the mathematical model of the valveless system containing the asymmetrical pump. The pressures of
are then used to estimate the hydraulic force to control the valves of the true system. Although the virtual system contains both a velocity and an acceleration feedback, the true system may be controlled in an open-loop manner from input to output velocity, with or without acceleration feedback.
These parameters (i.e., , , , and ) may then be tuned and optimized until the desired system behavior is achieved. With the proposed control strategy, referred to here as the virtual system switching law (VSL), the desired system behavior is for the valves to switch based on the factors contained in the modified hydraulic force of Equation (15), i.e., the external force, force components, due to commanded accelerations and frictional forces. Regarding frictional forces, only viscous friction is considered here. Note that although, the virtual system uses both velocity and acceleration feedback, the true system may be controlled in either open-loop or in a closed-loop manner.
6. Conclusions
The results of the paper may be summarized as follows:
Mode switching using the steady-state switching law (SSL) recently proposed by Costa and Sepehri has been investigated.
It was shown that, as with its predecessor (switching based on ), mode switching may occur under certain operating conditions, resulting in degraded performance or loss of control over the actuator.
A theoretical analysis was conducted and two underlying mechanisms were identified for this type of behavior, each leading to a distinct type of mode switching. For this reason, the classification of type 1 and type 2 mode switching was introduced.
It was shown that, although the SSL results in the correct operating quadrant and proper behavior steady-state, both type 1 and type 2 mode switching may occur due to dynamic considerations. Using the SSL, type 1 mode switching could not be eliminated by filtering of the hydraulic force nor by the introduction of artificial damping.
A novel control strategy consisting of a more sophisticated algorithm, based on the new quadrant division recently introduced by Costa and Sepehri, was proposed and investigated.
Numerical results demonstrated proper behavior, and the absence of both type 1 and type 2 mode switching, using the proposed strategy for a wide range of operating conditions, including situations under which use of the SSL, leads to improper operation and loss of control over the actuator.
To the best of the authors’ knowledge, this is the first paper reporting mode switching using the SSL. Experimental validations are therefore called for. An experimental system suitable for this purpose is currently being constructed. Unlike previous works on mode switching, the results presented here are based on the novel quadrant division of Costa and Sepehri. The validity of this quadrant division is neither questioned nor disputed here. In fact, as with the SSL, the proposed strategy is based on this quadrant division.
It has, however, been shown that improper operation may result even with strategies based on this new quadrant division, and further investigations of such phenomena, are therefore, warranted. As with the early works on mode switching using the previous quadrant division, the analysis presented here involves certain simplifying assumptions (e.g., the absence of nonlinear friction, line losses and varying bulk moduli). This has been done with a view of first studying the problem at its core to establish a fundamental understanding. Future works should include investigations of how breaking these assumptions affects performance and regions of stable operation.
The strategy, presented here, has so far shown great promise for the elimination of mode switching, and could possibly be a final decisive solution, or provide the motivation for a new research direction within the field of mode switching in pump-controlled single-rod cylinders, focusing on sophisticated control algorithms implemented in software.





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}