Development of Haptic Stylus for Manipulating Virtual Objects in Mobile Devices



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Design of A New Kinesthetic Stylus
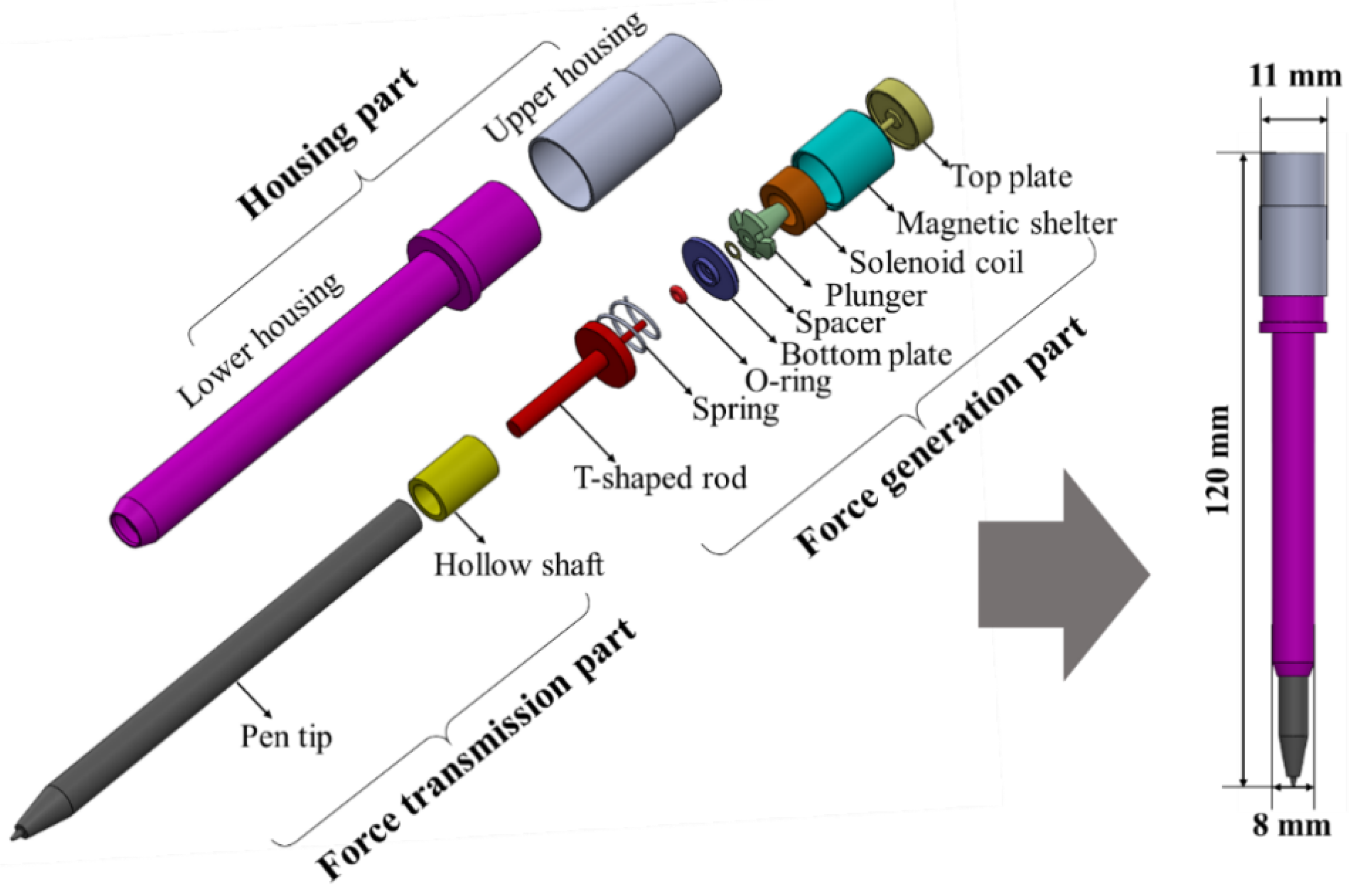
2.1. Overall Structure
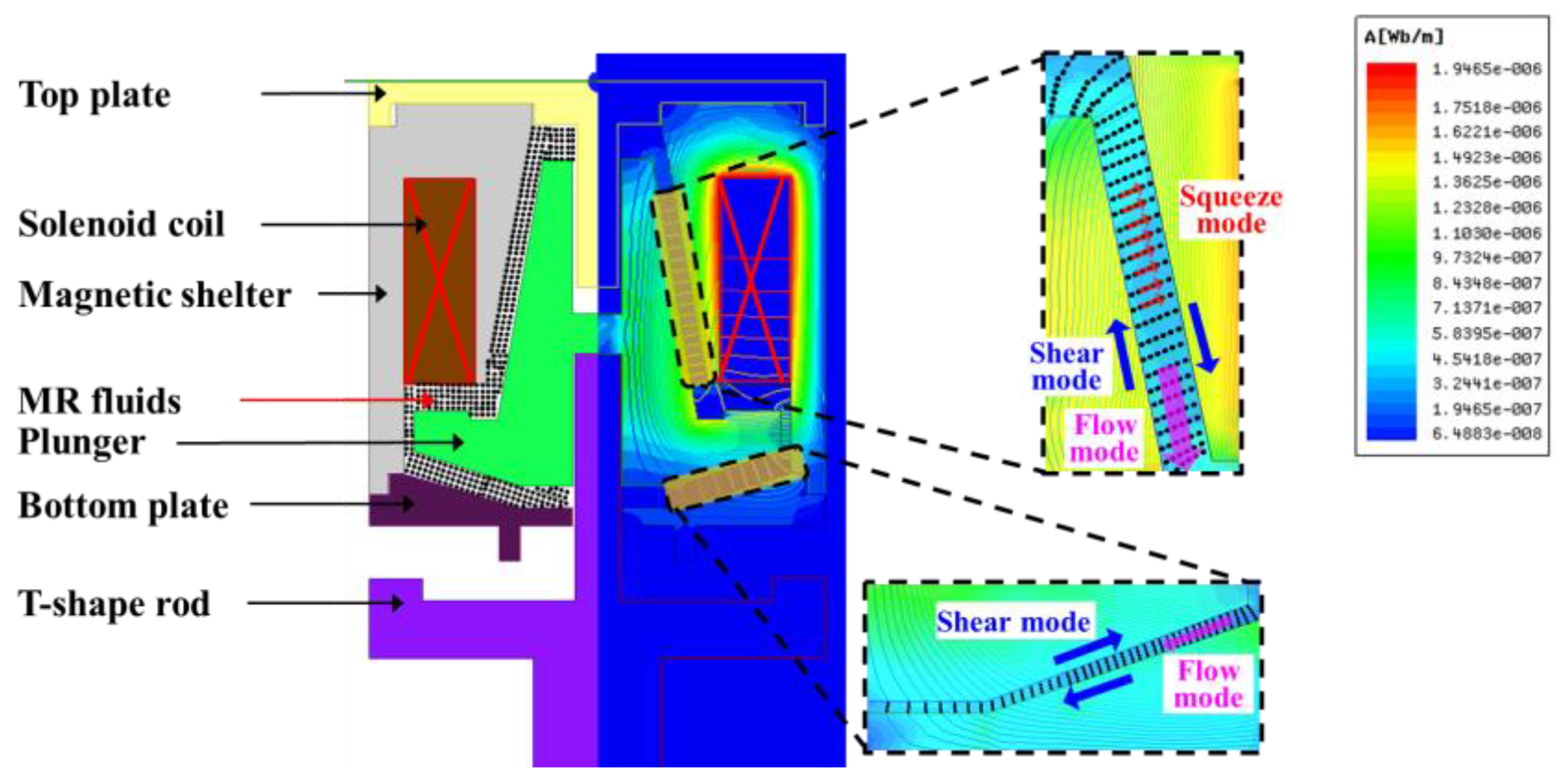
2.2. Operating Principle
2.3. Optimization of the Haptic Stylus
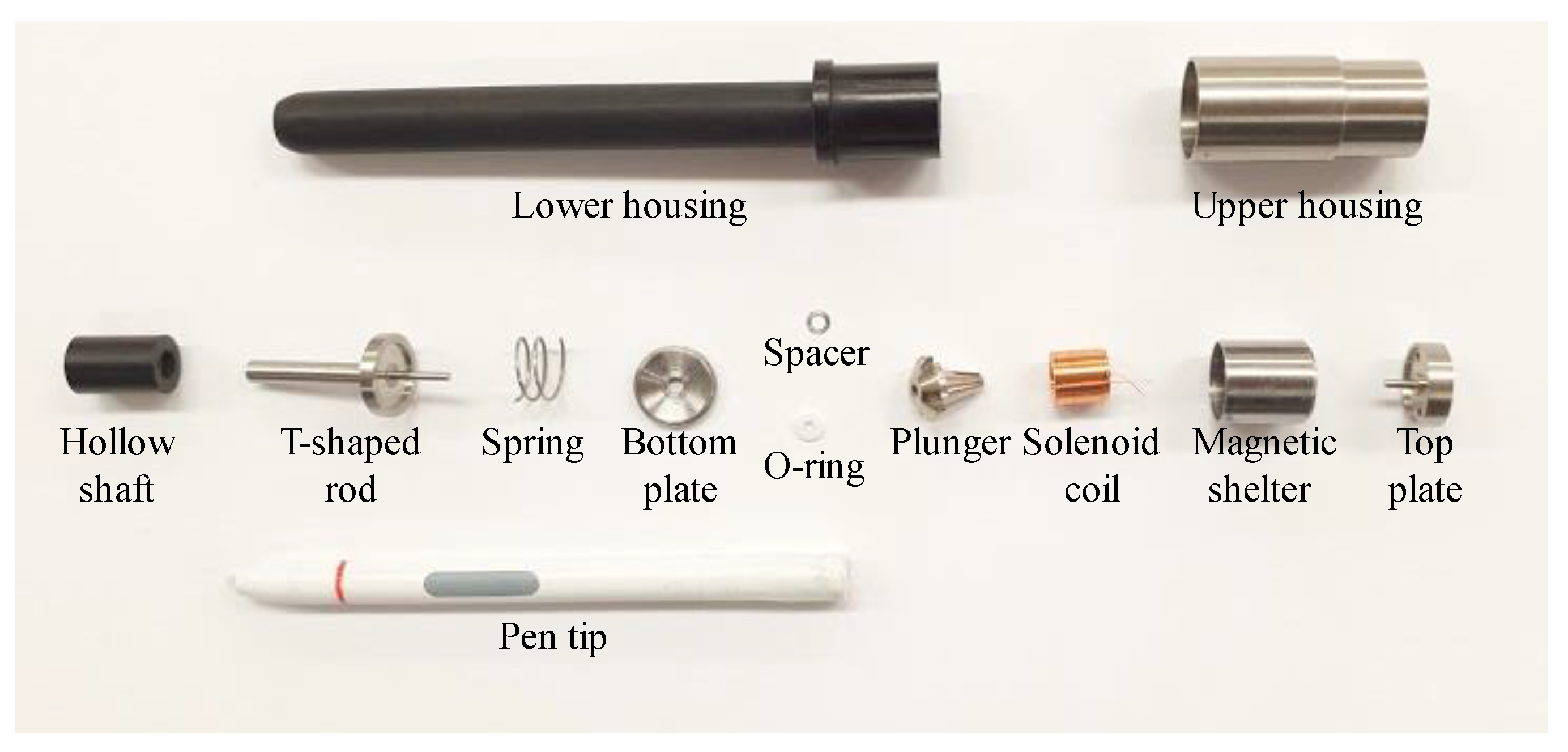
2.4. Fabrication of the Tiny Haptic Stylus
3. Experiment of the Tiny Haptic Stylus
3.1. Experimental Setup
3.2. Experimental Results
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lee, J.C.; Dietz, P.; Leigh, D.; Yerazunis, W.; Hudson, S.E. Haptic pen: A tactile feedback stylus for touch screens. In Proceedings of the ACM Symposium on User Interface Software and Technology (UIST) 2004, Santa Fe, NM, USA, 24–27 October 2004; pp. 291–294. [Google Scholar] [CrossRef]
- Kyung, K.; Lee, J.; Park, J. Ubi-Pen: Development of a compact tactile display module and its application to a haptic stylus. In Proceedings of the Second Joint EuroHaptics Conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems (WHC’07), Tsukaba, Japan, 22–24 March 2007; pp. 109–114. [Google Scholar] [CrossRef]
- Kyung, K.; Lee, J.; Park, J. Haptic stylus and empirical studies on braille, button, and texture display. J. Biomed. Biotechnol. 2008, 2008, 369651. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liao, C.; Guimbretière, F.; Loeckenhoff, C.E. Pen-top feedback for paper-based interfaces. In Proceedings of the ACM Symposium on User Interface Software and Technology (UIST), New York, NY, USA, 15–18 October 2006; pp. 201–210. [Google Scholar] [CrossRef] [Green Version]
- Cho, Y.; Bianchi, A.; Marquardt, N.; Bianchi-Berthouze, N. RealPen: Providing realism in handwriting tasks on touch surfaces using auditory-tactile feedback. In Proceedings of the ACM Symposium on User Interface Software and Technology (UIST), Tokyo, Japan, 16–19 October 2016; pp. 195–205. [Google Scholar] [CrossRef] [Green Version]
- Wang, Q.; Ren, X.; Sun, X. Enhancing pen-based interaction using electrovibration and vibration haptic feedback. In Proceedings of the ACM CHI Conference on Human Factors in Computing Systems, New York, NY, USA, 6–11 May 2017; pp. 3746–3750. [Google Scholar] [CrossRef]
- Arasan, A.; Basdogan, C.; Sezgin, T.M. Haptic stylus with inertial and vibro-tactile feedback. In Proceedings of the IEEE World Haptics Conference, Daejeon, Korea, 14–17 April 2013; pp. 425–430. [Google Scholar] [CrossRef] [Green Version]
- Kamuro, S.; Minamizawa, K.; Kawakami, N.; Tachi, S. Ungrounded kinesthetic pen for haptic interaction with virtual environments. In Proceedings of the IEEE International Symposium on Robot and Human Interactive Communication, Toyama, Japan, 27 September–2 October 2009; pp. 436–441. [Google Scholar] [CrossRef]
- Tian, L.; Song, A.; Chen, D. A novel haptic stylus for mobile terminal. In Proceedings of the EuroHaptics, London, UK, 4–7 July 2016; pp. 338–349. [Google Scholar] [CrossRef]
- Kianzad, S.; MacLean, K.E. Collaborating through magic pens: Grounded forces in large, overlappable workspaces. In Proceedings of the AsiaHaptics, Incheon, Korea, 14–16 November 2018; pp. 233–237. [Google Scholar] [CrossRef]
- Kara, O.C.; Patoglu, V. VnStylus: A haptic stylus with variable tip compliance. IEEE Trans. Haptics 2020. Early Access. [Google Scholar] [CrossRef] [PubMed]
- Chen, D.; Song, A.; Tian, L. A novel miniature multi-mode haptic pen for image interaction on mobile terminal. In Proceedings of the IEEE International Symposium on Interaction on Mobile Terminal Haptic, Audio and Visual Environments and Games (HAVE), Ottawa, ON, Canada, 11 October 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Chen, D.; Song, A.; Tian, L.; Yu, Y.; Zhu, L. MH-Pen: A pen-type multi-mode haptic interface for touch screens interaction. IEEE Trans. Haptics 2018, 11, 555–567. [Google Scholar] [CrossRef] [PubMed]
- Carlson, J.D.; Jolly, M.R. MR fluid, foam and elastomer devices. Mechatronics 2000, 10, 555–569. [Google Scholar] [CrossRef]
- Boelter, R.; Janocha, H. Design rules for MR fluid actuators in different working modes. In Proceedings of the Volume 3045, Smart Structures and Materials 1997: Passive Damping and Isolation, San Diego, CA, USA, 3–6 March 1997; pp. 148–159. [Google Scholar] [CrossRef]
- Yang, T.-H.; Koo, J.H.; Kim, S.-Y.; Kyung, K.-U.; Kwon, D.-S. A miniature magneto-rheological actuator with an impedance sensing mechanism for haptic applications. J. Intell. Mater. Syst. Struct. 2013, 25, 1054–1061. [Google Scholar] [CrossRef]
- Yang, T.-H.; Koo, J.H. Experimental evaluation of a miniature MR device for a wide range of human perceivable haptic sensations. Smart. Mater. Struct. 2017, 26, 125006. [Google Scholar] [CrossRef]
- Brigley, M.; Choi, Y.-T.; Wereley, N.M.; Choi, S.-B. Magnetorheological isolators using multiple fluid modes. J. Intell. Mater. Syst. Struct. 2007, 18, 1143–1148. [Google Scholar] [CrossRef]
- Grunwald, A.; Olabi, A.G. Design of magneto-rheological (MR) valve. Sens. Actuators A Phys. 2008, 148, 211–223. [Google Scholar] [CrossRef] [Green Version]
- Jones, L.A. Kinesthetic sensing. In Human and Machine Haptics; MIT Press: Cambridge, MA, USA, 2000. [Google Scholar]
- Immersion, UX Impacts of Haptic Latency in Automotive Interfaces. Available online: https://pdfs.semanticscholar.org/de7c/0c19188642cc925c256608f048163ea5973d.pdf (accessed on 28 August 2019).
- GNOME. GNOME Human Interface Guidelines 2.2.3/ Feedback. Available online: https://developer.gnome.org/hig-book/unstable/feedback-response-times.html.en (accessed on 28 August 2019).
- Nielsen Norman Group. Response Times: The 3 Important Limits. Available online: https://www.nngroup.com/articles/response-times-3-important-limits/ (accessed on 28 August 2019).










© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Choi, D.-S.; Yun, I.-H.; Kim, T.-H.; Byeon, S.; Kim, S.-Y. Development of Haptic Stylus for Manipulating Virtual Objects in Mobile Devices. Actuators 2020, 9, 30. https://doi.org/10.3390/act9020030
Choi D-S, Yun I-H, Kim T-H, Byeon S, Kim S-Y. Development of Haptic Stylus for Manipulating Virtual Objects in Mobile Devices. Actuators. 2020; 9(2):30. https://doi.org/10.3390/act9020030
Chicago/Turabian StyleChoi, Dong-Soo, In-Ho Yun, Tae-Hoon Kim, SangKyu Byeon, and Sang-Youn Kim. 2020. "Development of Haptic Stylus for Manipulating Virtual Objects in Mobile Devices" Actuators 9, no. 2: 30. https://doi.org/10.3390/act9020030
APA StyleChoi, D. -S., Yun, I. -H., Kim, T. -H., Byeon, S., & Kim, S. -Y. (2020). Development of Haptic Stylus for Manipulating Virtual Objects in Mobile Devices. Actuators, 9(2), 30. https://doi.org/10.3390/act9020030