Aerodynamic Drag Reduction and Optimization of MIRA Model Based on Plasma Actuator


Abstract
:1. Introduction
2. Geometry and Simulation Method
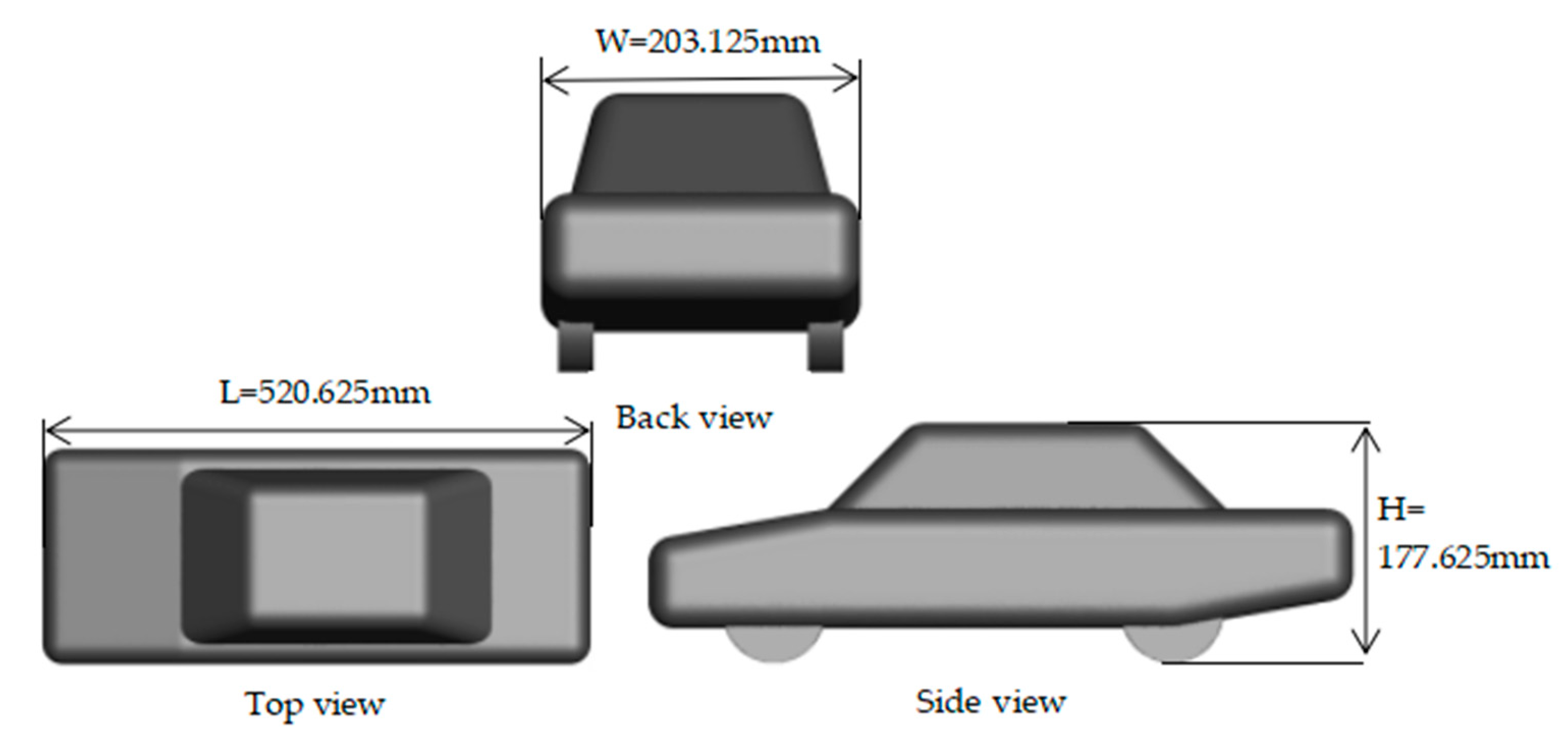
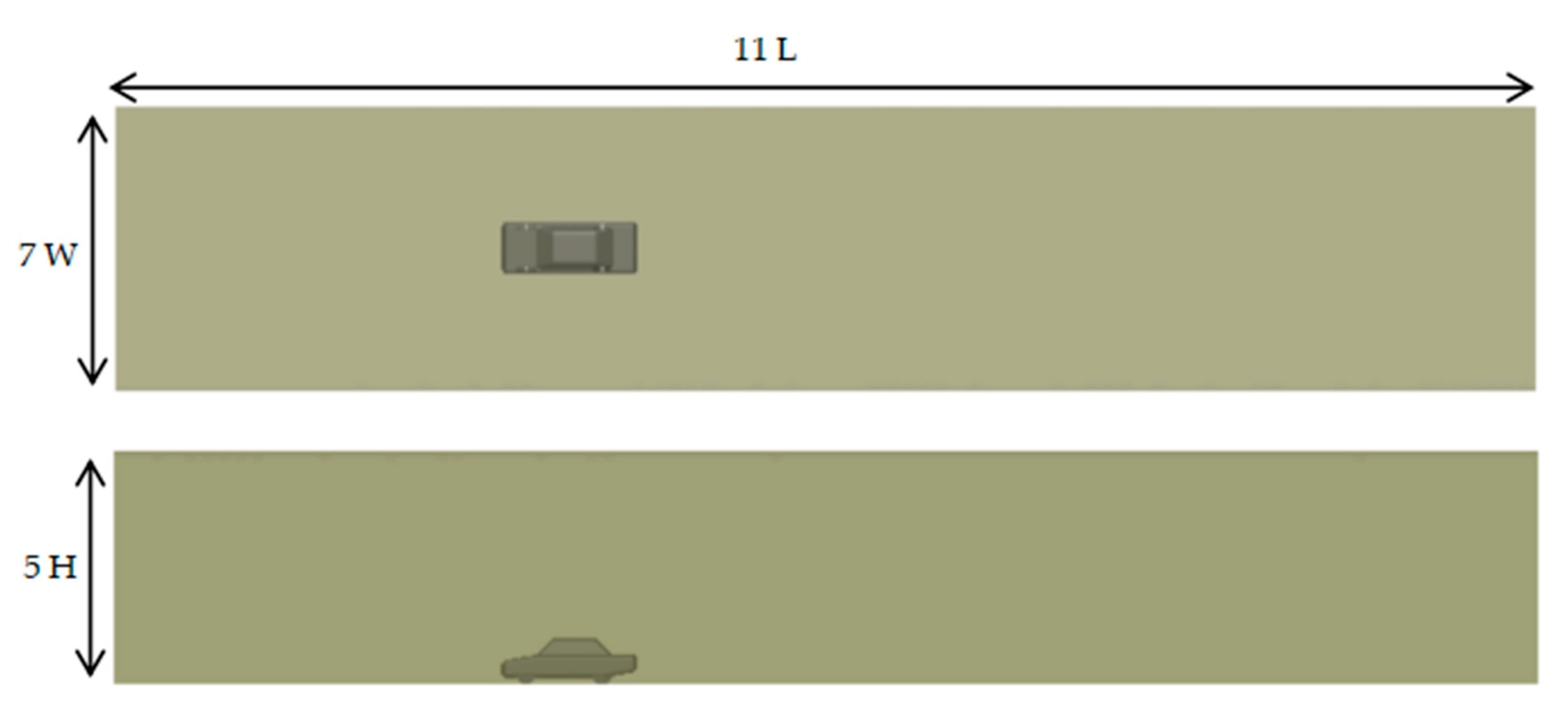
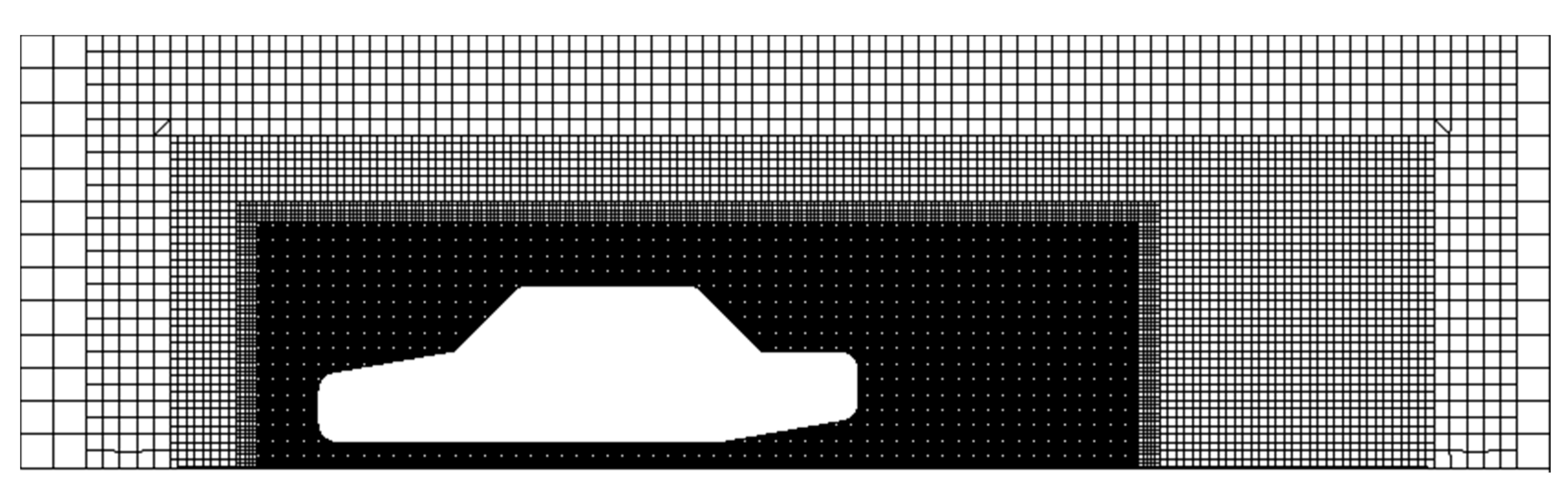
2.1. Research Model and Mesh Strategy
2.2. Boundary Condition and Solver Settings
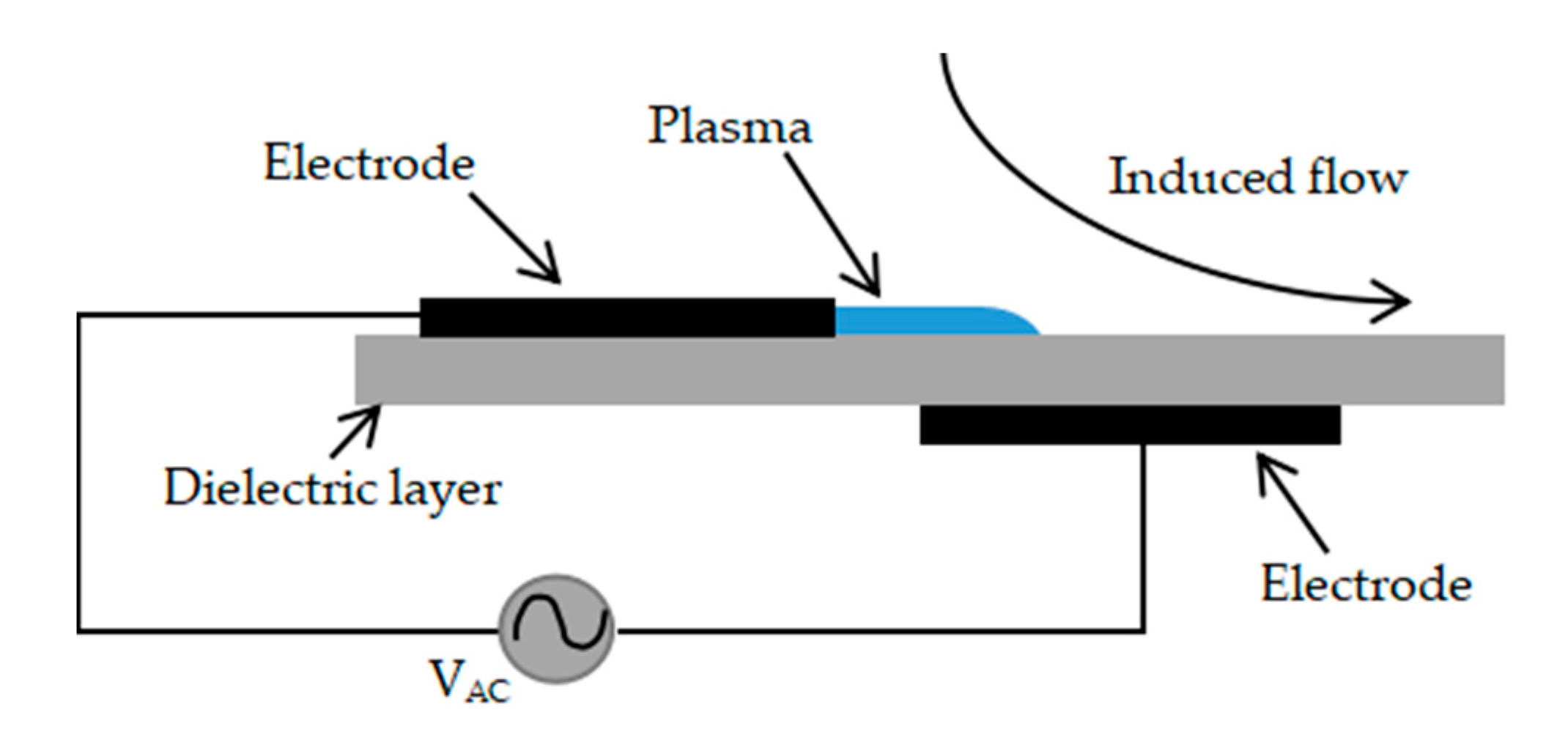
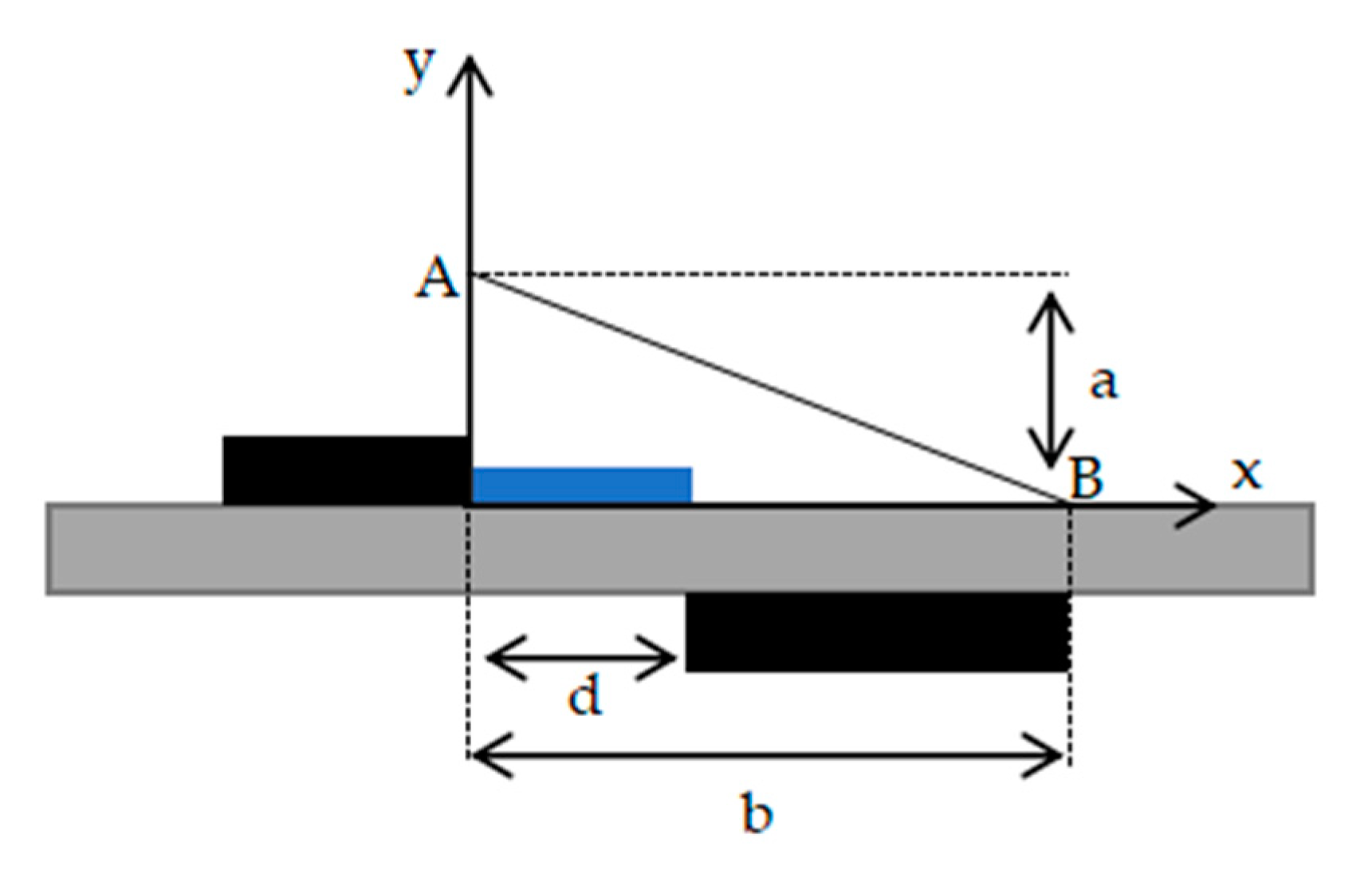
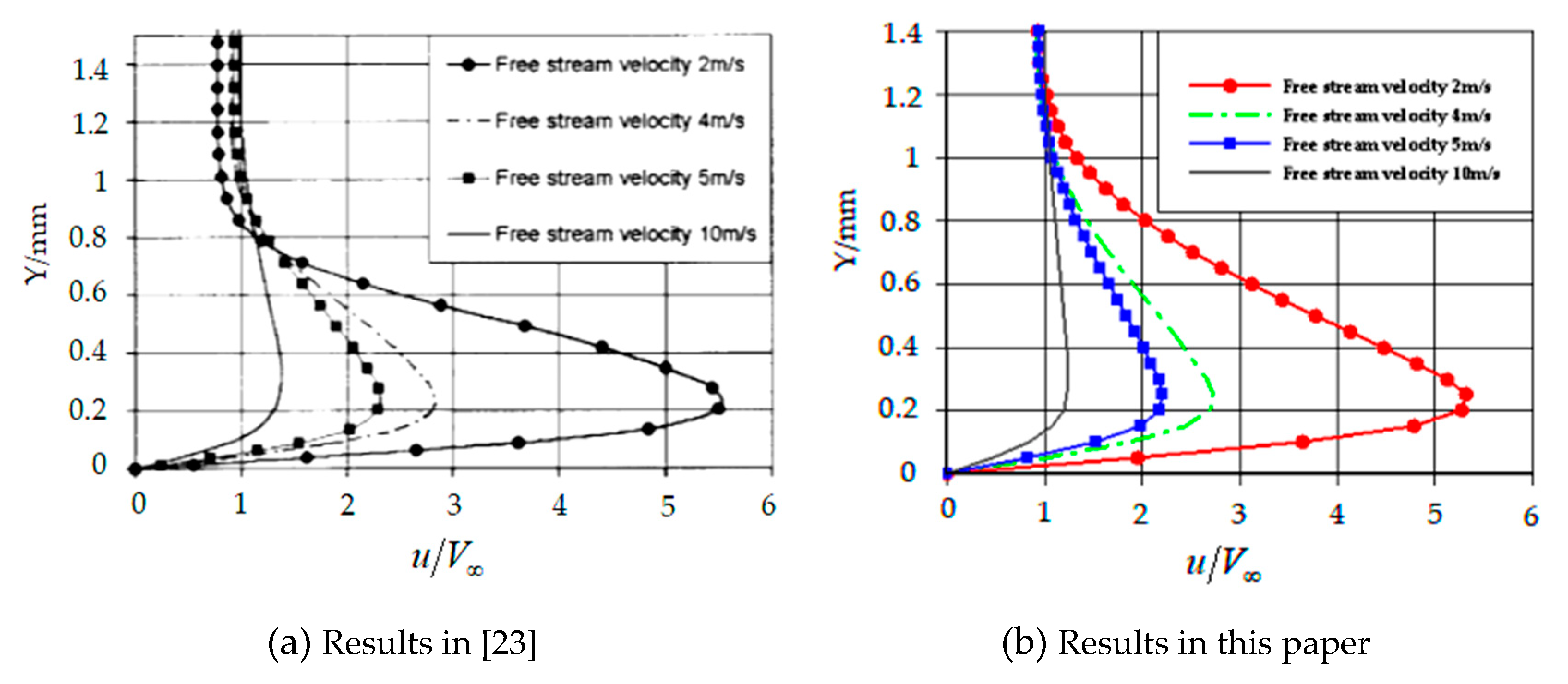
2.3. Plasma Body Force Model
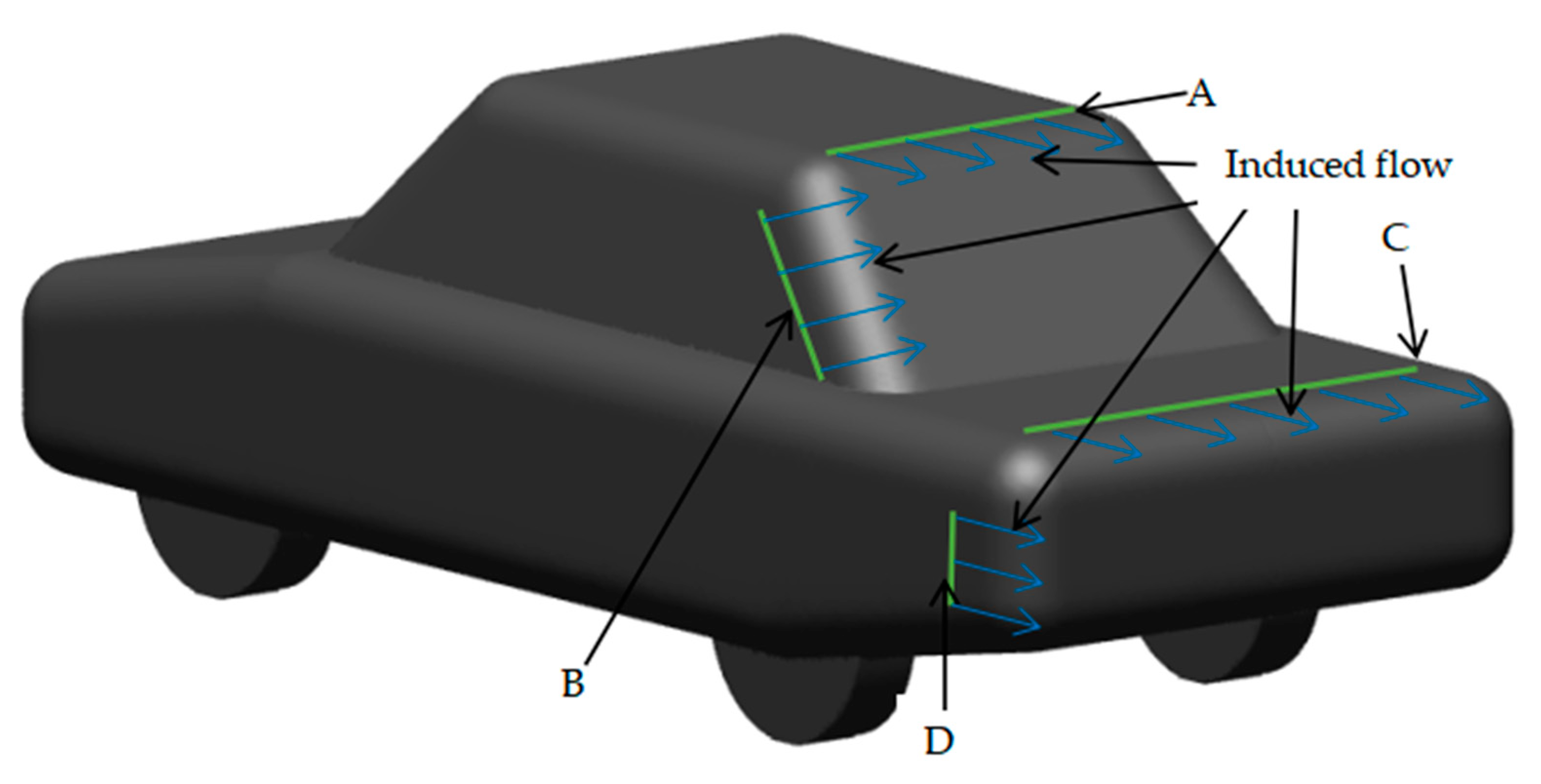
2.4. Location of Plasma Actuators
3. Optimization
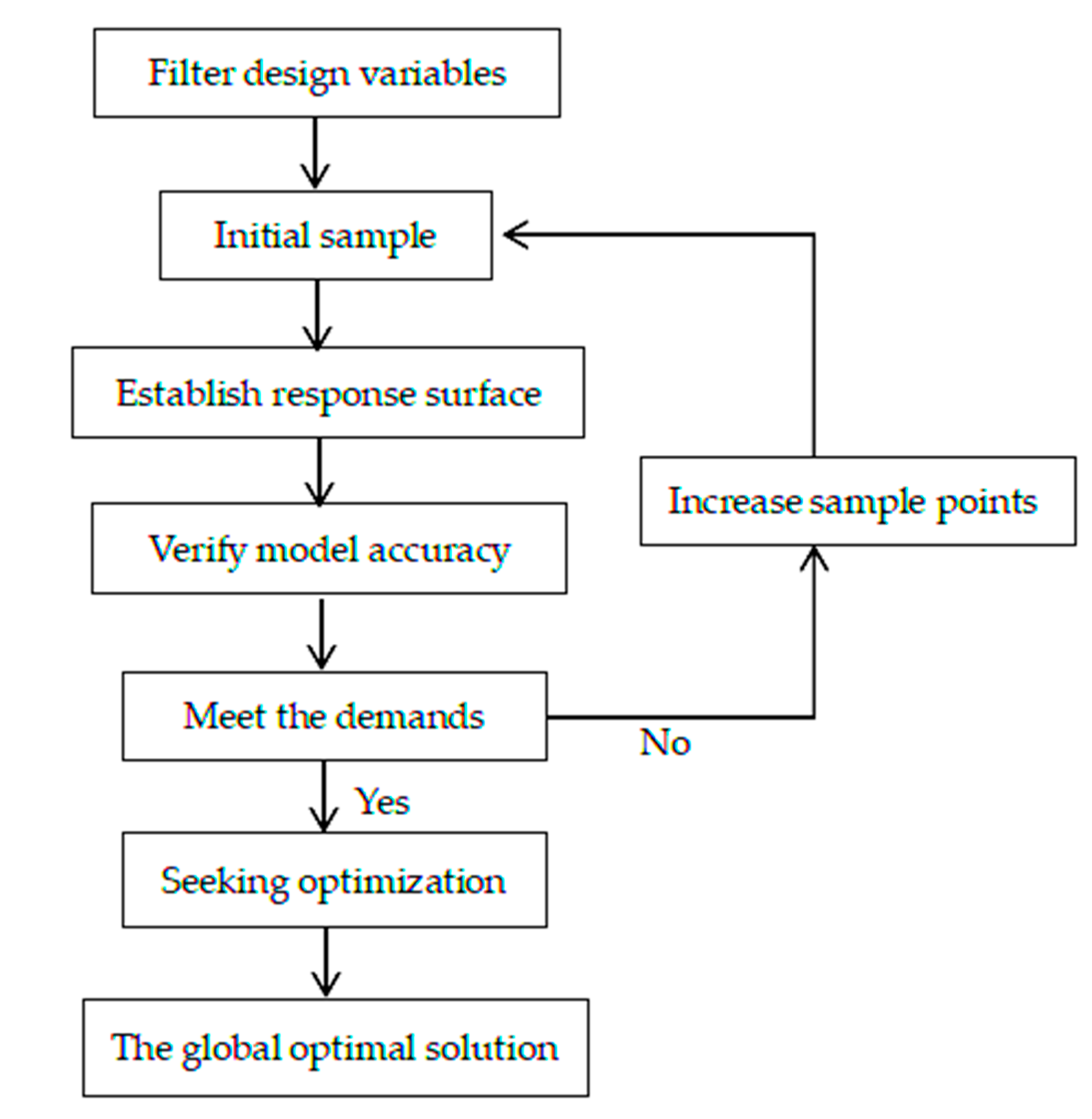
3.1. Optimization Algorithm
3.2. Variables and Optimization Objectives
4. Results and Discussion
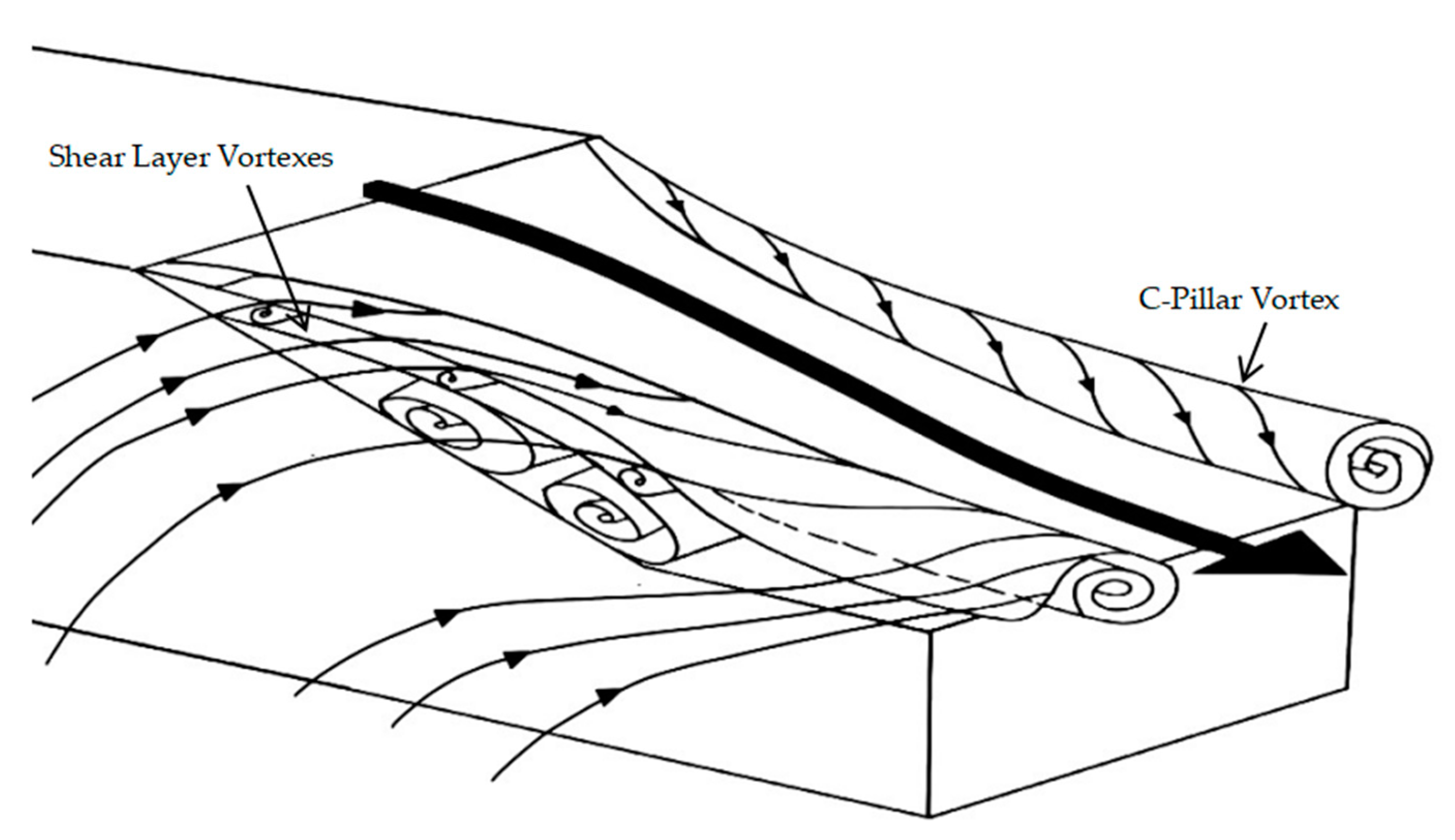
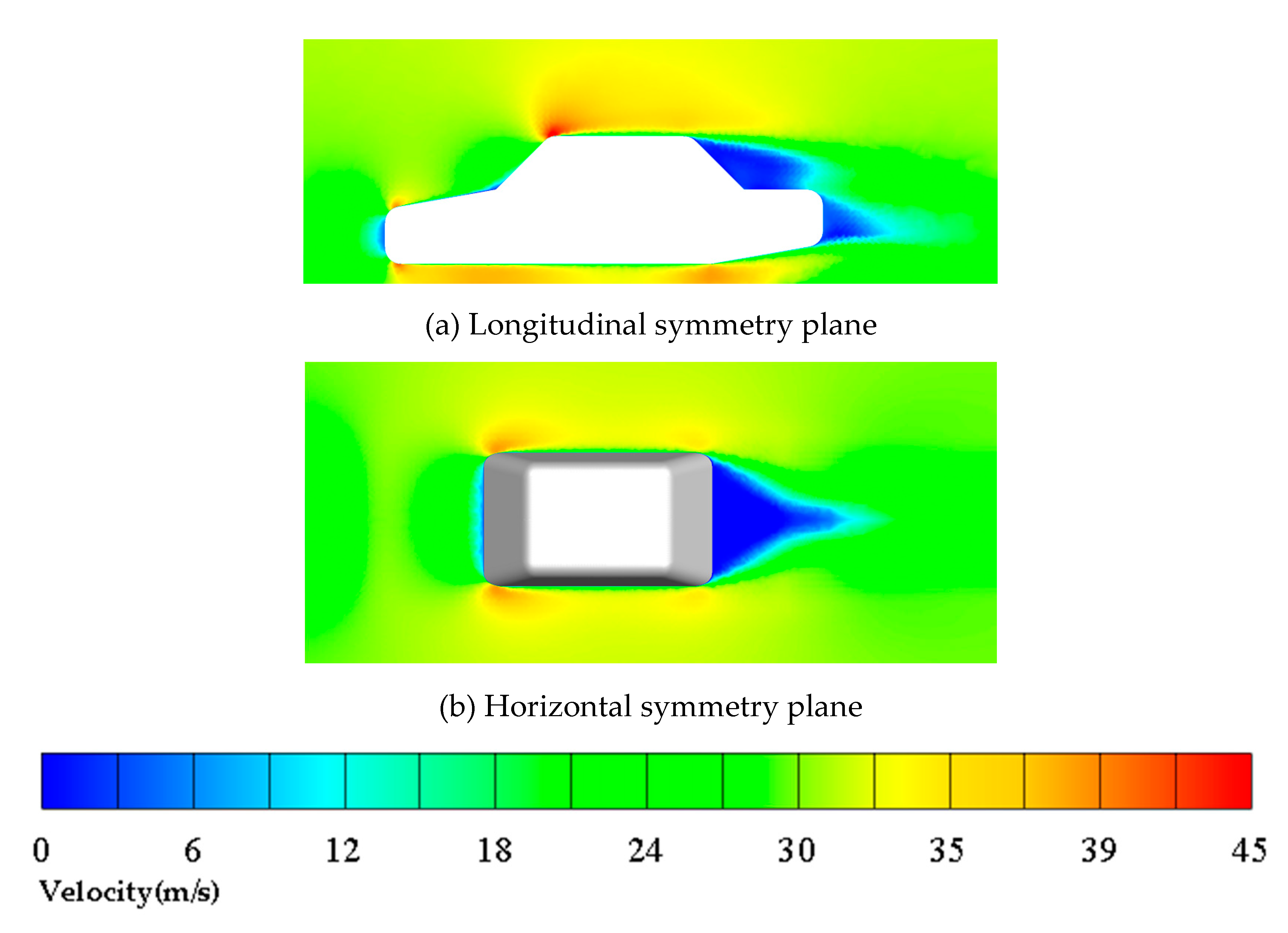
4.1. Original Model Flow Field Analysis
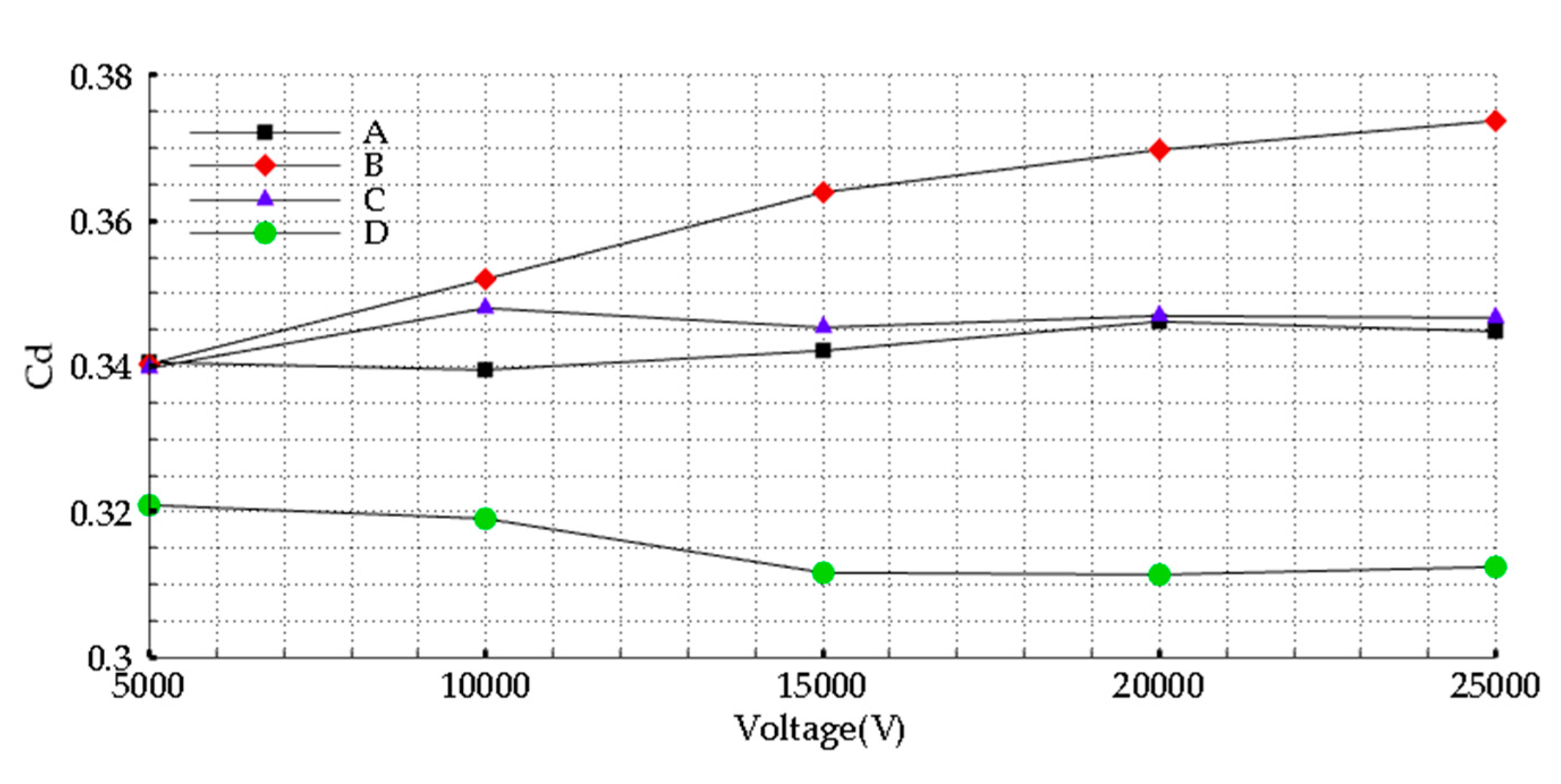
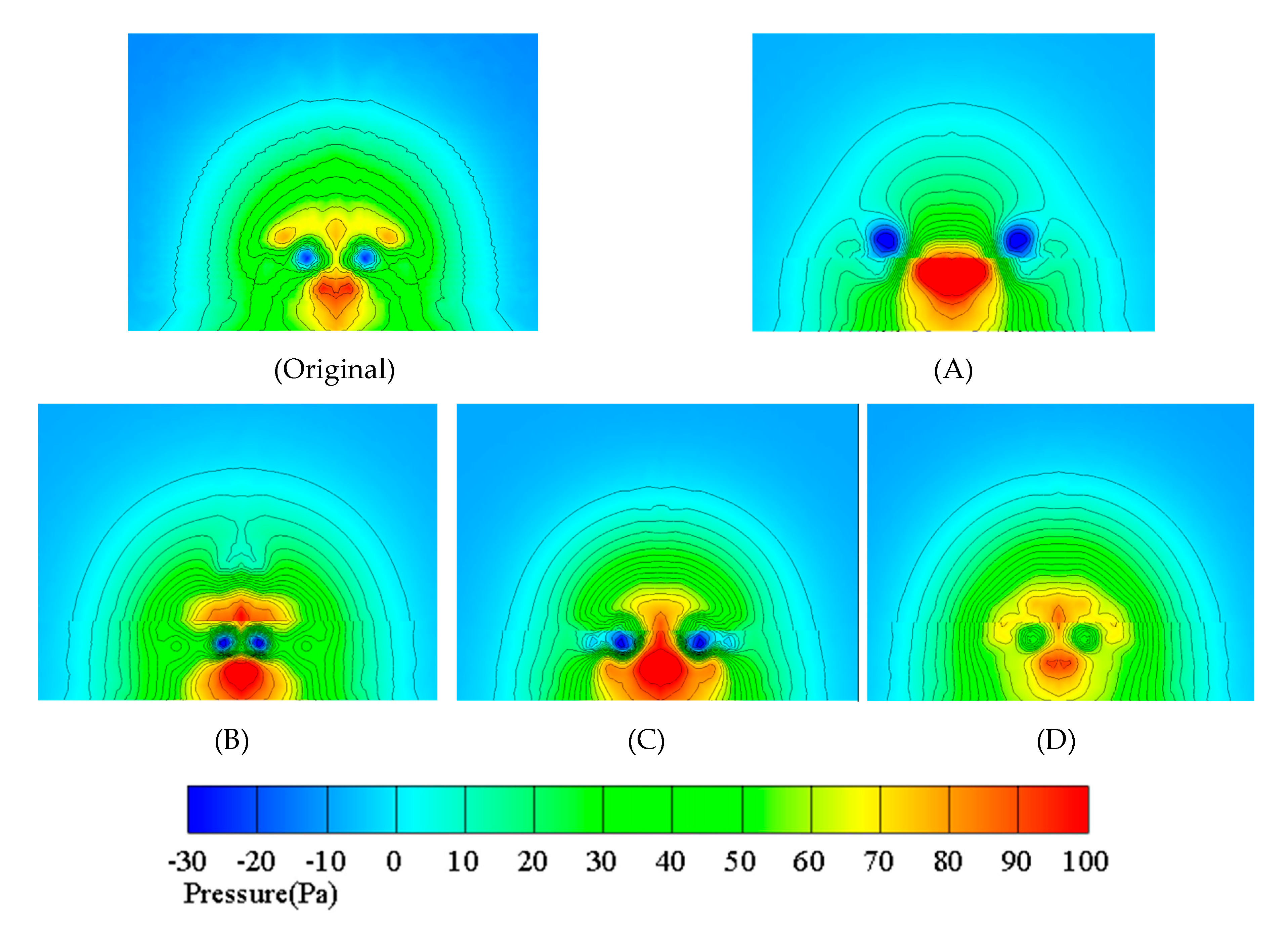
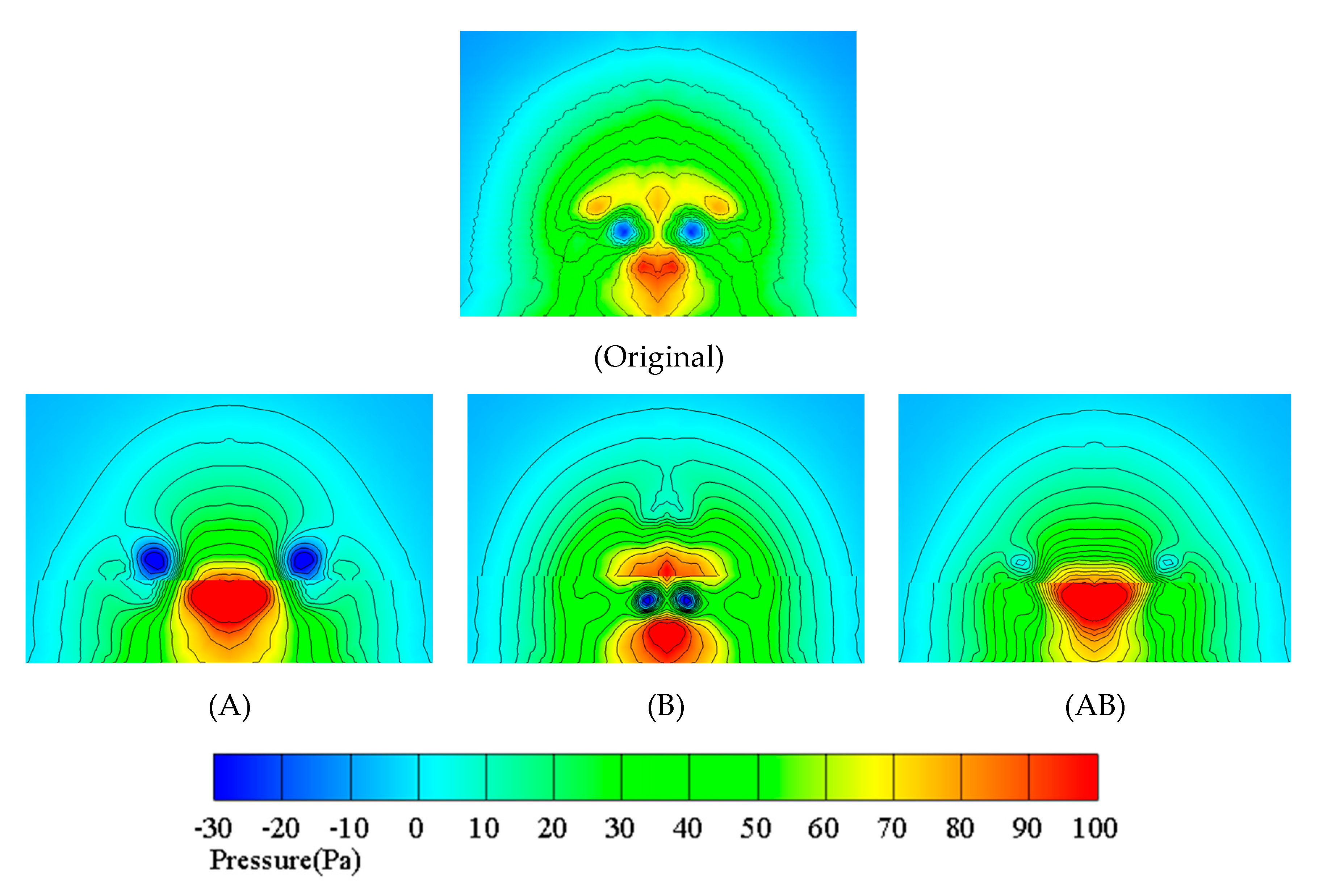
4.2. Single Plasma Actuation Results
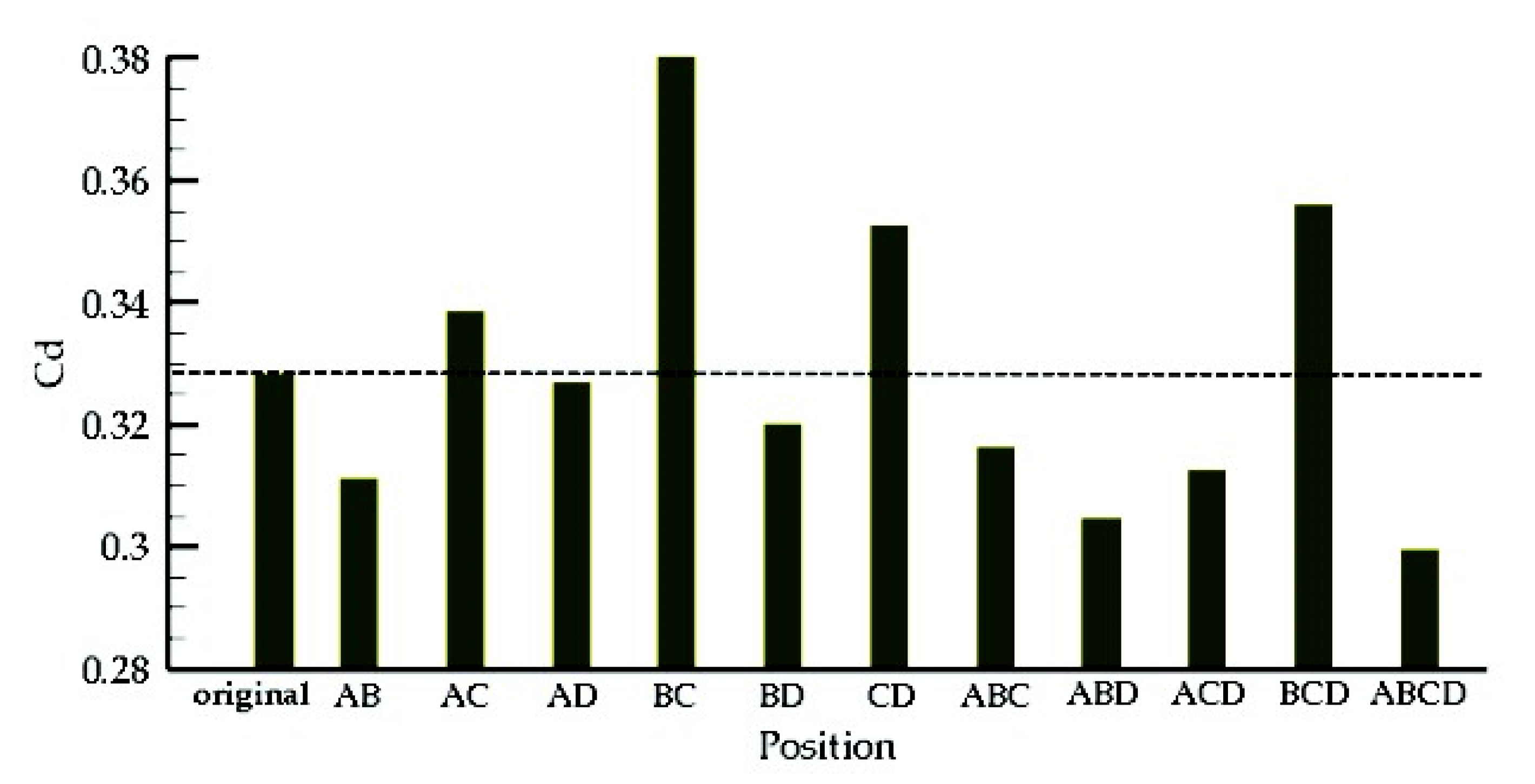
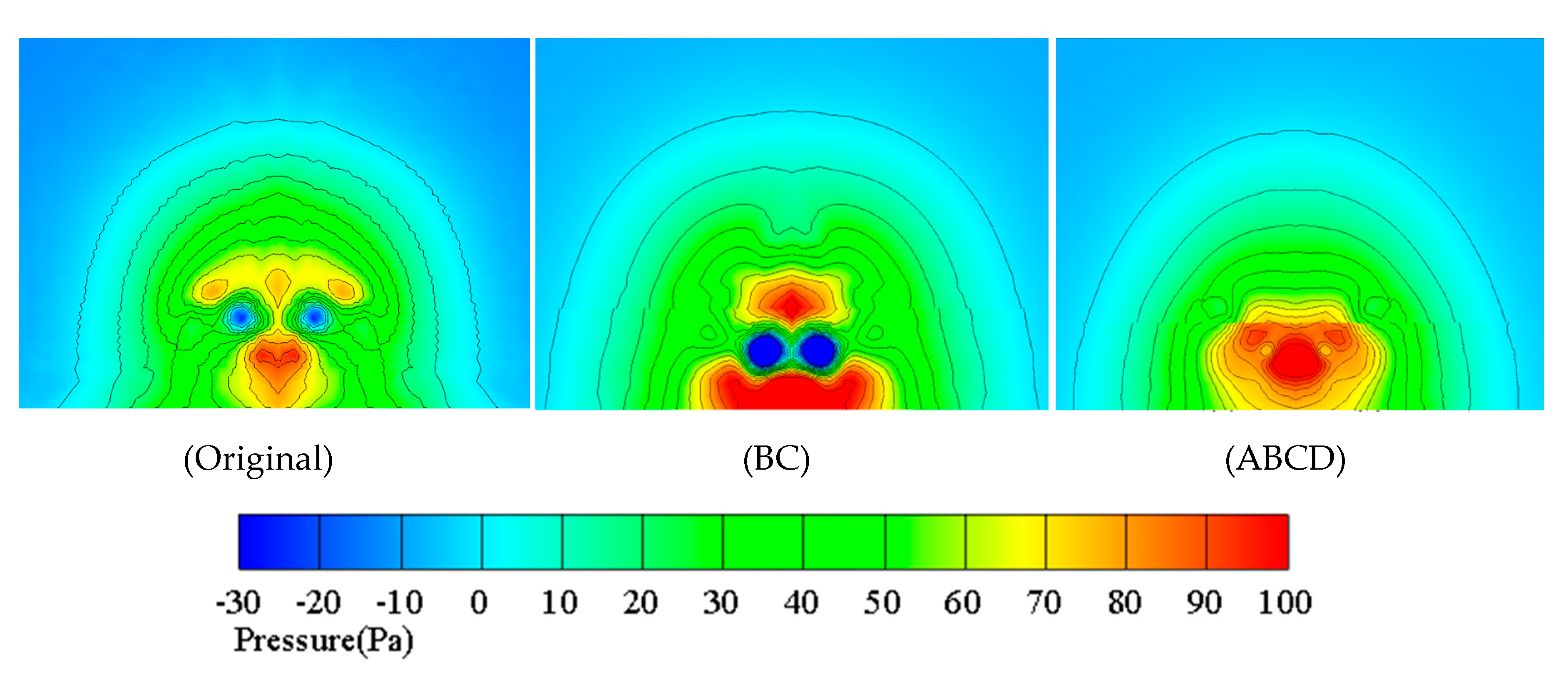
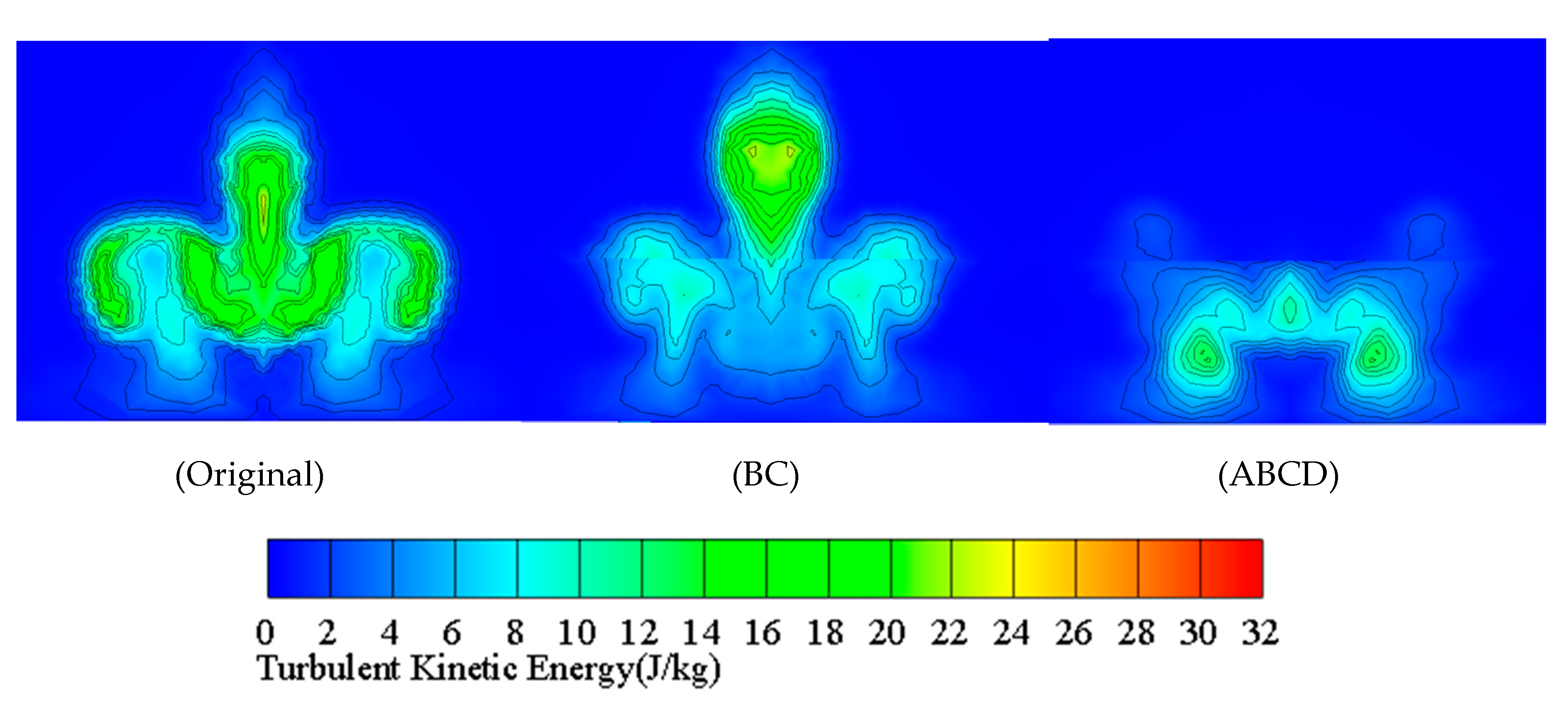
4.3. Multiple Plasma Actuation Results
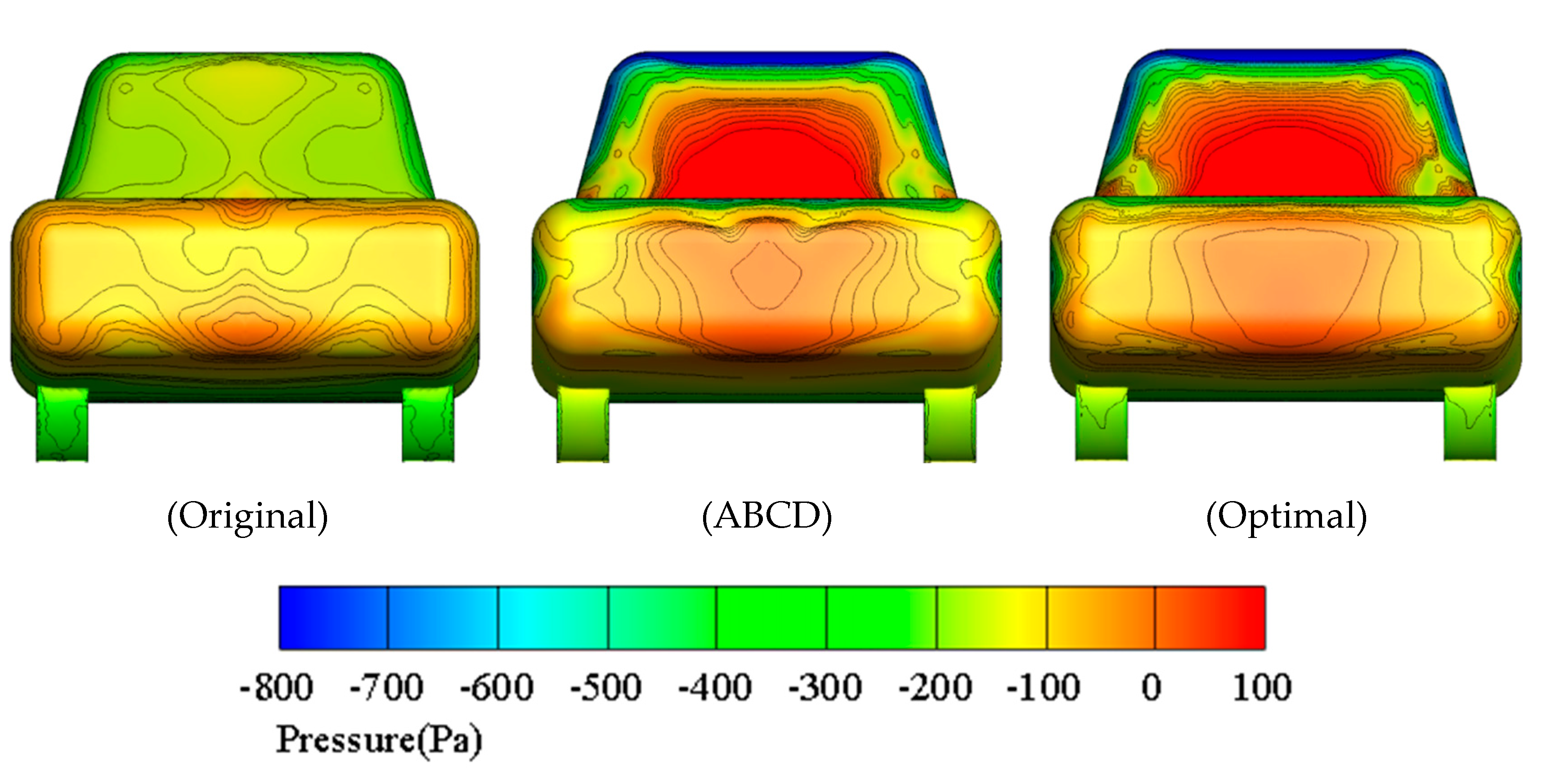
4.4. Optimization Results
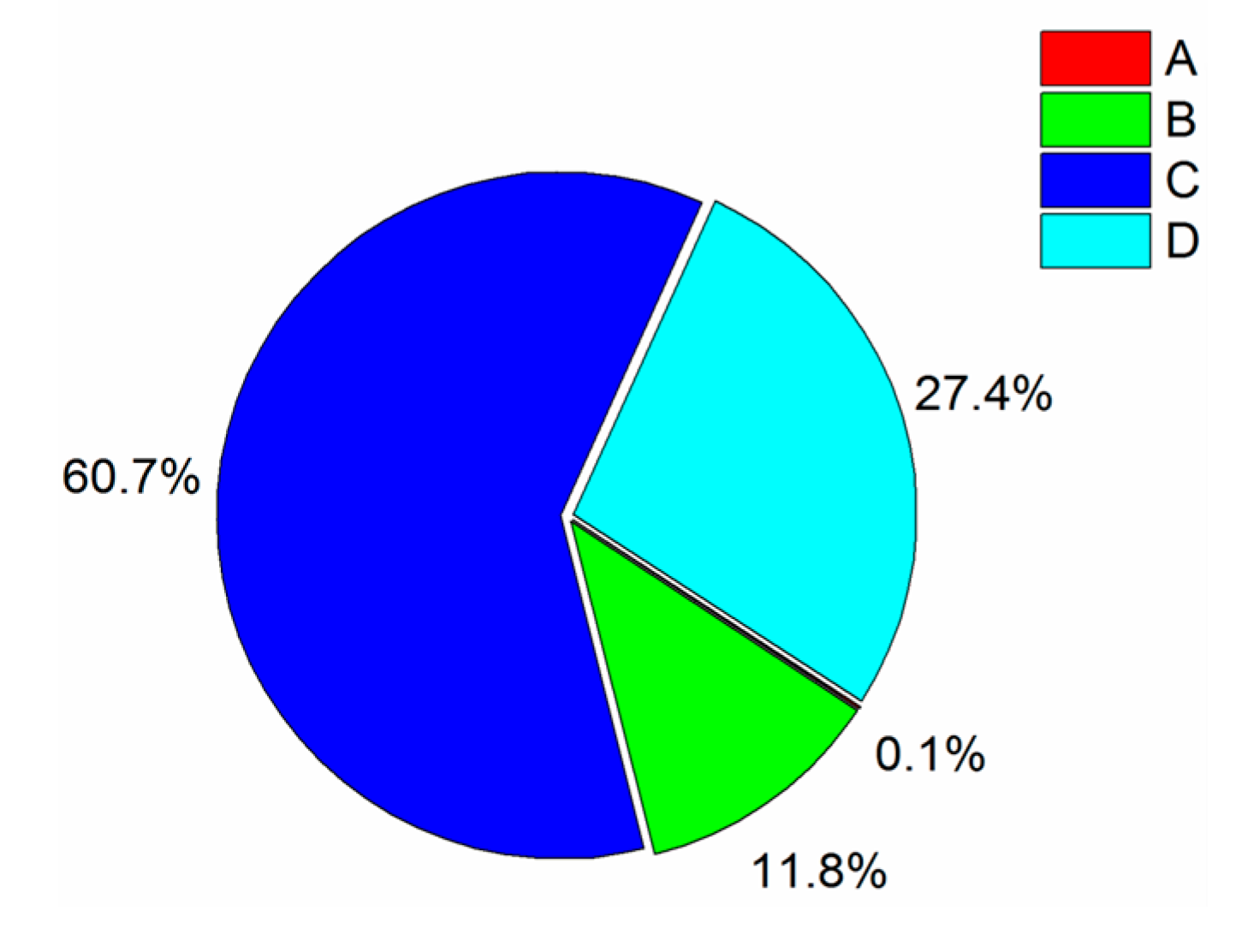
4.5. Data Mining
5. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| AC | Alternating current |
| CD | Coefficient drag |
| DC | Direct current |
| EI | Expected improvement |
| EGO | Efficient global optimization |
| LHS | Latin hyper-cube sampling |
| MIRA | Motor industry research association |
| SDBD | Surface dielectric barrier discharge |
| SMODE | Self-adaptive multi-objective differential evolution |
| UD | Uniform design |
| UDF | User define function |
References
- Gu, Z.Q. Automotive Aerodynamics; People’s Communications Press: Beijing, China, 2005. [Google Scholar]
- Nouzawa, T.; Hiasa, K.; Nakamura, T. Analysis of wake pattern for reducing aerodynamic drag of notch-back model. SAE Trans. 1990, 486–494. [Google Scholar]
- Gilhome, B.R.; Saunders, J.W.; Sheridan, J. Time averaged and unsteady near-wake analysis of cars. SAE Trans. 2001, 1179–1196. [Google Scholar]
- Wang, S. Wind Tunnel Test Research on the Aerodynamic Characteristics Model of Mira Model Group; Hunan University: Hunan, China, 2011. [Google Scholar]
- Yang, Y.; Liu, Z.; Gu, Z.Q. Optimization design method of non-smooth surface at the tail of Mira step back model. J. Chongqing Univ. 2015, 38, 10–17. [Google Scholar]
- Zheng, M.; Huang, J.F. Aerodynamic drag reduction method based on non-smooth surface and eddy current interference. J. Mech. Eng. 2016, 27, 982–988. [Google Scholar]
- Boeuf, J.P.; Lagmich, Y.; Unfer, T.; Callegari, T.; Pitchford, L.C. Electrohydrodynamic force in dielectric barrier discharge plasma actuators. J. Appl. Phys. D 2007, 40, 652–662. [Google Scholar] [CrossRef]
- Artana, G.; D’Adamo, J.; Leger, L.; Moreau, E.; Touchard, G. Flow control with electrohydrodynamic actuators AIAA 2001-0351. In Proceedings of the 39th Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 8 January 2001. [Google Scholar]
- Labergue, A.; Moreau, E.; Zou, N.; Touchard, G. Separation control using plasma actuators: Application to a free turbulent jet. J. Appl. Phys. D 2007, 40, 674–684. [Google Scholar] [CrossRef]
- Roth, J.R.; Sherman, D.M. Electrohydrodynamic flow control with a glow-discharge surface plasma. AIAA J. 2000, 38, 1166–1172. [Google Scholar] [CrossRef]
- Bychkov, V.; Kuzmin, G.; Minaev, I.; Rukhadze, A.; Timofeev, I. Sliding discharge application in aerodynamics AIAA 2003-530. In Proceedings of the 46th Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 7–10 January 2008. [Google Scholar]
- Roy, S.; Wang, C.C. Bulk flow modification with horseshoe and serpentine plasma actuators. J. Phys. D 2009, 42. [Google Scholar] [CrossRef]
- Wang, J.L.; Li, H.X.; Liu, F.; Luo, S. Forebody asymmetric load manipulated by a horseshoe-shaped plasma actuators AIAA 2009-904. In Proceedings of the 47th Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 5–8 January 2009. [Google Scholar]
- Rodrigues, F.; Mushyam, A.; Pascoa, J.; Trancossi, M. A new plasma actuator configuration for improved efficiency: The stair-shaped dielectric barrier discharge actuator. J. Phys. D 2019, 52. [Google Scholar] [CrossRef]
- Rodrigues, F.; Páscoa, J. Implementation of stair-shaped dielectric layers in micro and macro plasma actuators for increased efficiency and lifetime. J. Fluids Eng. 2020. [Google Scholar] [CrossRef]
- Roupassov, D.V.; Zavyalov, I.N.; Starikovskii, A.Y. Boundary layer separation plasma control using low-temperature non-equilibrium plasma of gas discharge AIAA 2006-373. In Proceedings of the 44th Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 9–12 January 2006. [Google Scholar]
- Correale, G.; Popov, I.B.; Rakitin, A.; Starikovskii, A.; Hulshoff, S.; Veldhuis, L. Flow separation control on airfoil with pulsed nanosecond discharge actuator AIAA 2011-1079. In Proceedings of the 49th Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 4–7 January 2011. [Google Scholar]
- Gaitonde, D.V.; McCrink, M.H. A semi-empirical model of a nanosecond pulsed plasma actuator for flow control simulation with LES AIAA 2012-0184. In Proceedings of the 50th Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Nashville, TN, USA, 9–12 January 2012. [Google Scholar]
- Leonov, S.B.; Yarantsev, D.A.; Gromov, V.G.; Kuriachy, A. Mec-hanisms of flow control by near-surface electrical discharge generation AIAA 2005-780. In Proceedings of the 43rd Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 10–13 January 2005. [Google Scholar]
- Shang, J.S.; Surzhikov, S.T.; Kimmel, R.; Gaitonde, D.; Menart, J.; Hayes, J. Mechnisms of plasma actuators for hyper-sonic flow control. Prog. Aerosp. Sci. 2005, 41, 642–668. [Google Scholar] [CrossRef]
- Enloe, C.L.; McLaughlin, T.E.; VanDyken, R.D.; Kachner, K.D.; Jumper, E.J.; Corke, T.C. Mechanisms and responses of a single dielectric barrier plasma actuator: Plasma morphology. AIAA J. 2004, 42, 589–594. [Google Scholar] [CrossRef]
- Roupassov, D.V.; Nikipelov, A.A.; Nudnova, M.M.; Starikovskii, A.Y. Flow separation control by plasma actuator with nanosecond pulsed-periodic discharge. AIAA J. 2009, 47, 168–185. [Google Scholar] [CrossRef]
- Shyy, W.; Jayaraman, B.; Anderson, A. Modeling of glow discharge-induced fluid dynamics. J. Appl. Phys. 2002, 92, 6434–6443. [Google Scholar] [CrossRef]
- Suzen, Y.B.; Huang, P.G.; Jacob, J.D. Numerical simulations of plasma based flow control applications AIAA 2005-4633. In Proceedings of the 35th Fluid Dynamics Conference and Exhibit, Toronto, ON, Canada, 6–9 June 2005. [Google Scholar]
- Johnson, G.A.; Scott, S.J. Plasma aerodynamic boundary layer interaction studies AIAA 2001-3052. In Proceedings of the 32nd Plasma-dynamics and Lasers Conference and 4th Weakly Ionized Gases Workshop, Anaheim, CA, USA, 11–14 June 2001. [Google Scholar]
- Mao, M.L.; Deng, X.G.; Xiang, D.P. Mechanisms of flow control in boundary layer by glow discharge plasma. J. Aerodyn. 2006, 24, 269–274. [Google Scholar]
- Gaitonde, D.V.; Visbal, M.R.; Roy, S. Control of flow past a wing section with plasma based body forces AIAA 2005-5302. In Proceedings of the Plasma-dynamics and Lasers Conference, Toronto, ON, Canada, 6–9 June 2005. [Google Scholar]
- Moreau, E. Airflow control by non-thermal plasma actuators. J. Phys. D 2007, 40, 605–636. [Google Scholar] [CrossRef]
- List, J.; Byerley, A.R.; McLaughlin, T.E.; Van Dyken, R.D. Using a plasma actuator to control laminar separation on a linear cascade turbine blade AIAA 2003-1026. In Proceedings of the 41st Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 6–9 January 2003. [Google Scholar]
- Kopiev, V.; Ostrikov, N.; Zaitsev, M.; Kopiev, V.; Belyaev, I.; Bityurin, V.; Klimov, A.; Moralev, I.; Godin, S. Jet noise control by nozzle surface HF DBD actuators AIAA 2011-911. In Proceedings of the 49th Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 4–7 January 2011. [Google Scholar]
- Shimizu, K.; Nakashima, T.; Sekimoto, S.; Fujii, K.; Hiraoka, T.; Nakamura, Y.; Nouzawa, T.; Ikeda, J.; Tsubokura, M. Aerodynamic drag reduction of a simplified vehicle model by promoting flow separation using plasma actuator. Mech. Eng. Lett. 2019, 5. [Google Scholar] [CrossRef]
- Michelis, T.; Kotsonis, M. Flow control on a transport truck side mirror using plasma actuators. J. Fluids Eng. 2015, 137. [Google Scholar] [CrossRef]
- Roy, S.; Zhao, P.; DasGupta, A.; Soni, J. Dielectric barrier discharge actuator for vehicle drag reduction at highway speeds. AIP Adv. 2016, 6, 025233. [Google Scholar] [CrossRef] [Green Version]
- Boucinha, V.; Weber, R.; Kourta, A. Drag reduction of a 3D bluff body using plasma actuators. Int. J. Aerodyn. 2011, 1, 262–281. [Google Scholar] [CrossRef]
- Shadmani, S.; Mojtaba, M.; Mousavi Nainiyan, S.; Mirzaei, M.; Ghasemiasl, R.; Pouryoussefi, S.G. Experimental investigation of flow control over an Ahmed body using DBD plasma actuator. J. Appl. Fluid Mech. 2018, 11, 1267–1276. [Google Scholar] [CrossRef]
- Hui, Z.; Hu, X.; Guo, P.; Wang, Z.; Wang, J. Separation flow control of a generic ground vehicle using an SDBD plasma actuator. Energies 2019, 12, 3805. [Google Scholar] [CrossRef] [Green Version]
- Zheng, Y.; Wang, L.; Li, A.; Tao, P. Performance evaluation by computational fluid dynamics modelling of the heavy gas dispersion with a low Froude number in a built environment. Indoor Built Environ. 2020, 29, 656–670. [Google Scholar] [CrossRef]
- Li, G. Research on Plasma Flow Control Mechanism and Its Application; Chinese Academy of Sciences: Beijing, China, 2008. [Google Scholar]
- Jones, D.R. A taxonomy of global optimization methods based on response surfaces. J. Glob. Optim. 2001, 21, 345–383. [Google Scholar] [CrossRef]
- Mckay, M.D.; Beckman, R.J.; Conover, W.J. A comparison of three methods for selecting values of input variables in the analysis of output from a computer code technometrics. Technometrics 1979, 21, 239–245. [Google Scholar]
- Fang, K.T.; Winker, P.; Zhang, Y. Uniform design: Theory and application. Technometrics 2000, 42, 237–248. [Google Scholar] [CrossRef]
- Song, L.; Luo, C.; Li, J.; Feng, Z. Automated multi-objective and multidisciplinary design optimization of a transonic turbine stage. Proc. Inst. Mech. Eng. Part A 2012, 226, 262–276. [Google Scholar] [CrossRef]
- Abuomar, O.; Nouranian, S.; King, R.; Bouvard, J.L.; Toghiani, H.; Lacy, T.E.; Pittman, C.U., Jr. Data mining and knowledge discovery in materials science and engineering: A polymer nanocomposites case study. Adv. Eng. Inf. 2013, 27, 615–624. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiment [4] | Simulation | Error (%) | |
|---|---|---|---|
| Cd | 0.3242 | 0.3289 | 1.4 |
| Model | A (V) | B (V) | C (V) | D (V) | Prediction Cd | Simulation Cd | Error (%) |
|---|---|---|---|---|---|---|---|
| Optimal | 12,802 | 20,517 | 11,210 | 12,101 | 0.2887 | 0.2856 | 1.09 |
| Original | 0.3289 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lai, C.; Fu, H.; Hu, B.; Ling, Z.; Jiang, L. Aerodynamic Drag Reduction and Optimization of MIRA Model Based on Plasma Actuator. Actuators 2020, 9, 64. https://doi.org/10.3390/act9030064
Lai C, Fu H, Hu B, Ling Z, Jiang L. Aerodynamic Drag Reduction and Optimization of MIRA Model Based on Plasma Actuator. Actuators. 2020; 9(3):64. https://doi.org/10.3390/act9030064
Chicago/Turabian StyleLai, Chenguang, Hang Fu, Bo Hu, Zhiwei Ling, and Li Jiang. 2020. "Aerodynamic Drag Reduction and Optimization of MIRA Model Based on Plasma Actuator" Actuators 9, no. 3: 64. https://doi.org/10.3390/act9030064
APA StyleLai, C., Fu, H., Hu, B., Ling, Z., & Jiang, L. (2020). Aerodynamic Drag Reduction and Optimization of MIRA Model Based on Plasma Actuator. Actuators, 9(3), 64. https://doi.org/10.3390/act9030064