A Novel Low-Frequency Piezoelectric Motor Modulated by an Electromagnetic Field



Abstract
:1. Introduction
2. Motor Structure and Working Principle
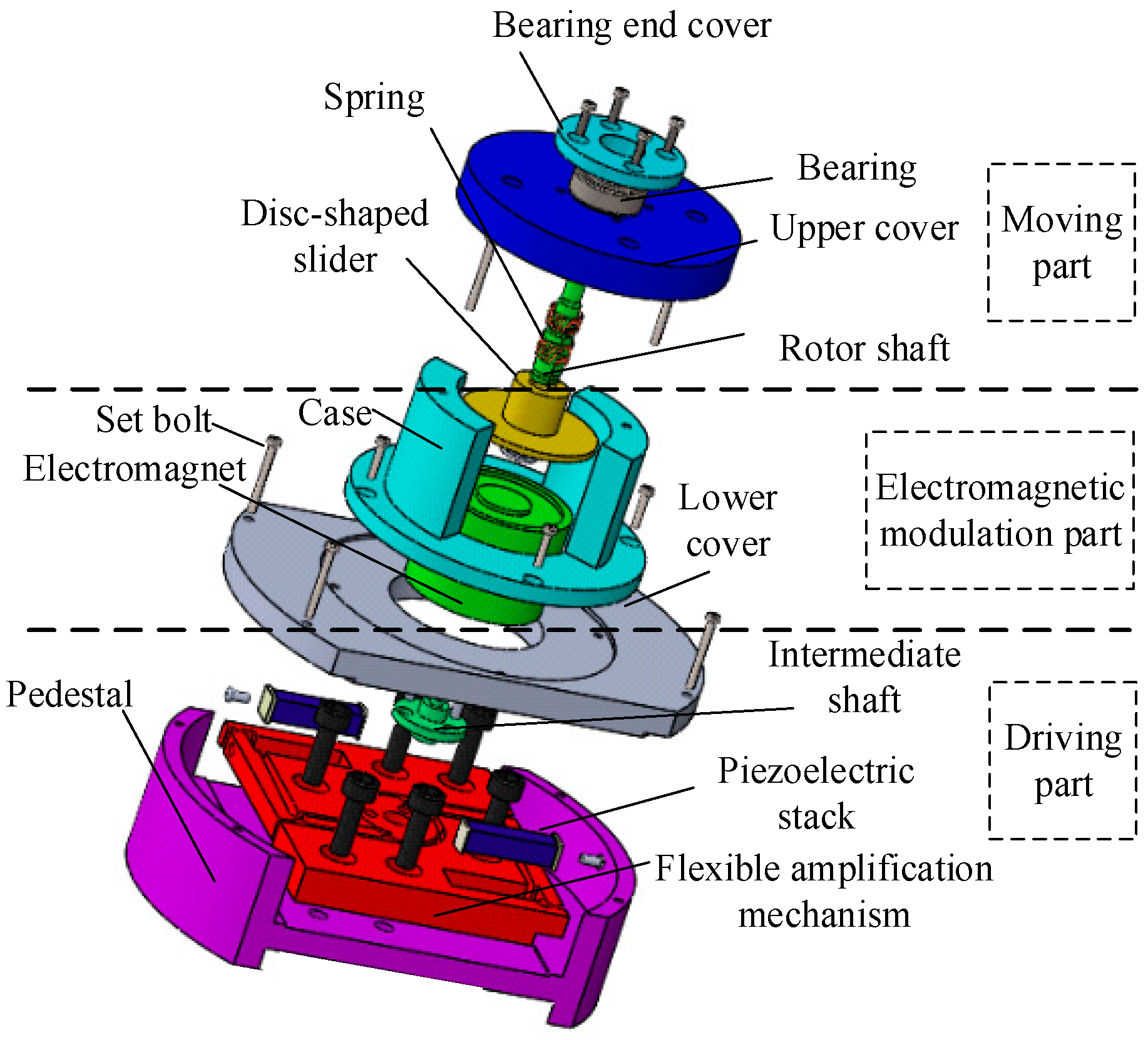
2.1. Motor Structure Composition
2.2. Working Principle
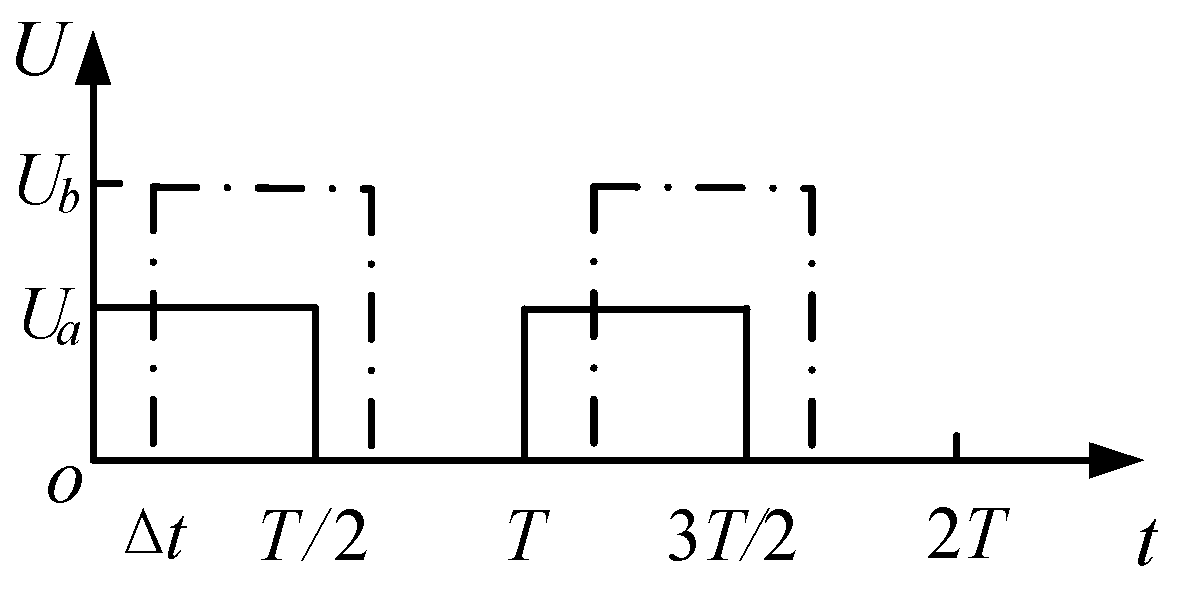
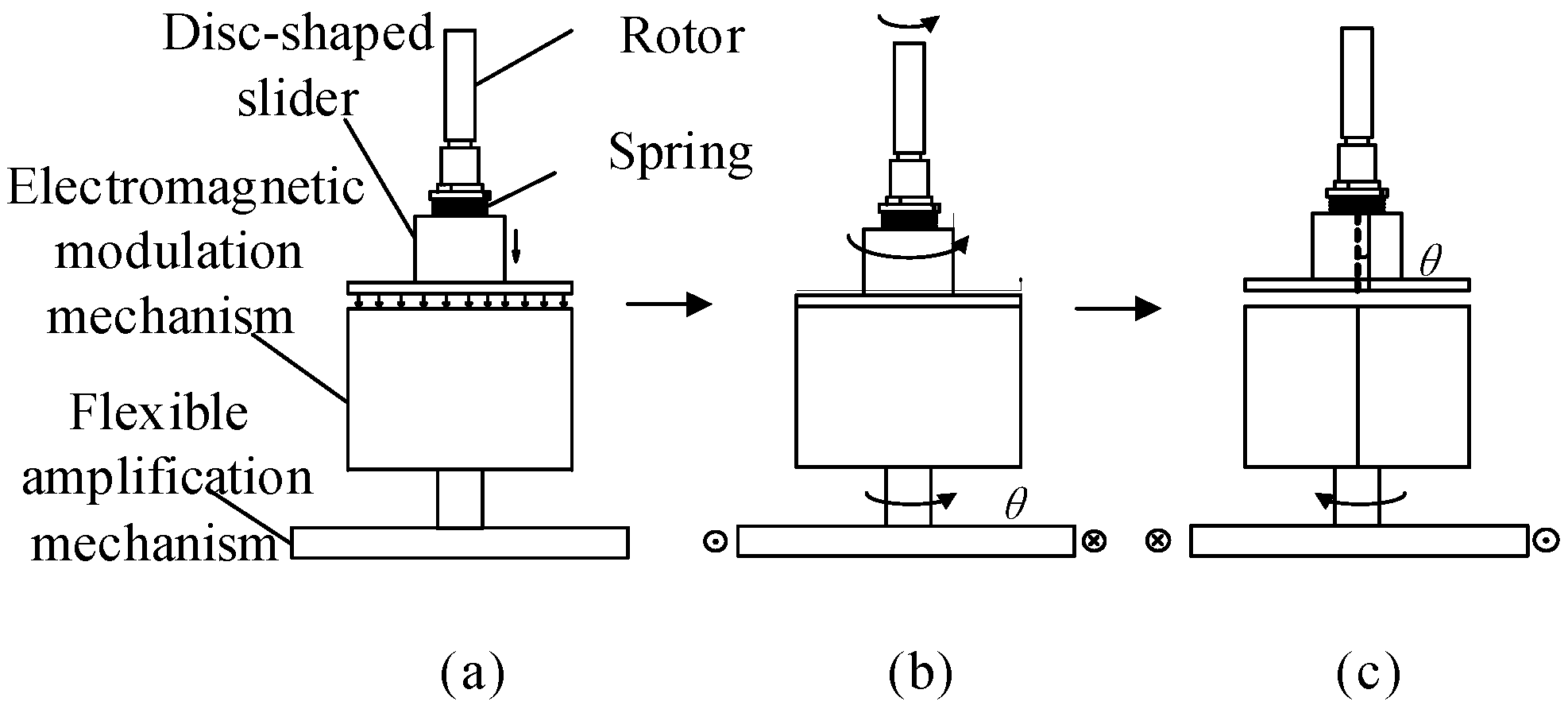
- A square wave signal with peak value Ua of voltage is supplied to the electromagnetic modulation mechanism. So, the disc-shaped slider is attracted under the action of the electromagnetic force and keeps in contact with the upper surface of the electromagnet, as shown in Figure 3a.
- After the time Δt, another square wave signal with peak value Ua of voltage, as shown in Figure 2, is applied to the piezoelectric stacks. Two piezoelectric stacks will produce elongation deformation, and then drive the electromagnetic modulation part and the rotor shaft rotation angle θ through the flexible amplification mechanism, as shown in Figure 3b.
- When the high level of the driving signal Ua disappears, as shown in Figure 2, the disc-shaped slider would be separated from the electromagnet under the action of the spring force. After another period of time Δt, the driving signal Ub of the piezoelectric stacks is at low level. Then, two piezoelectric stacks restore to their original length and the electromagnetic modulation part returns to its original position with the elastic restoring force of the flexible amplifying mechanism, so the rotor rotates an angle θ relative to the electromagnet, as shown in Figure 3c. The time different Δt of each cycle of two driving signals prevents that the rotor shaft reverses due to inertia when the disc-shaped slider is separated from the electromagnet. Repeating the above steps can achieve continuous step rotation of the motor.
3. Analysis for Free Vibration
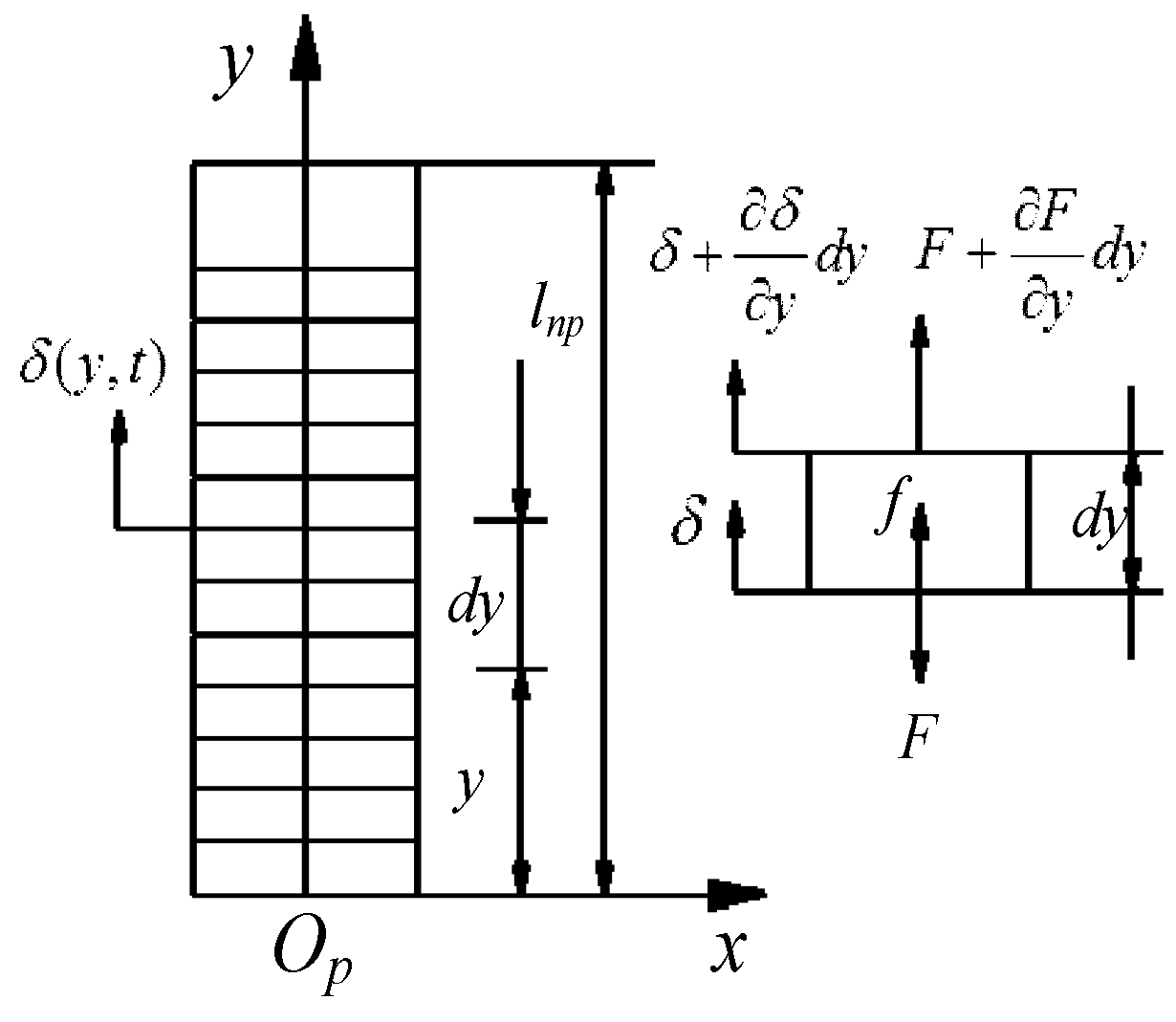
3.1. Free Vibration Modeling of a Piezoelectric Stack
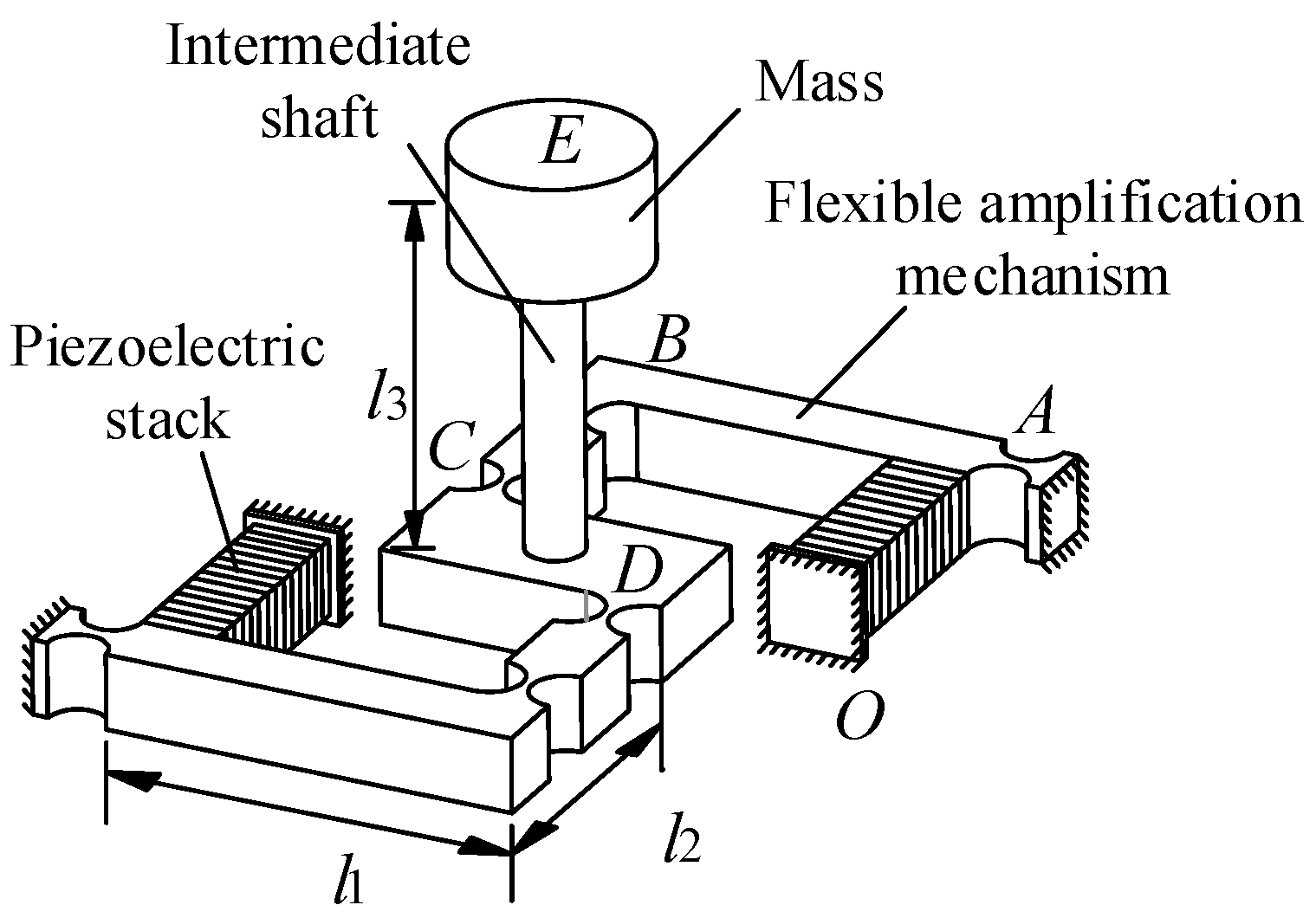
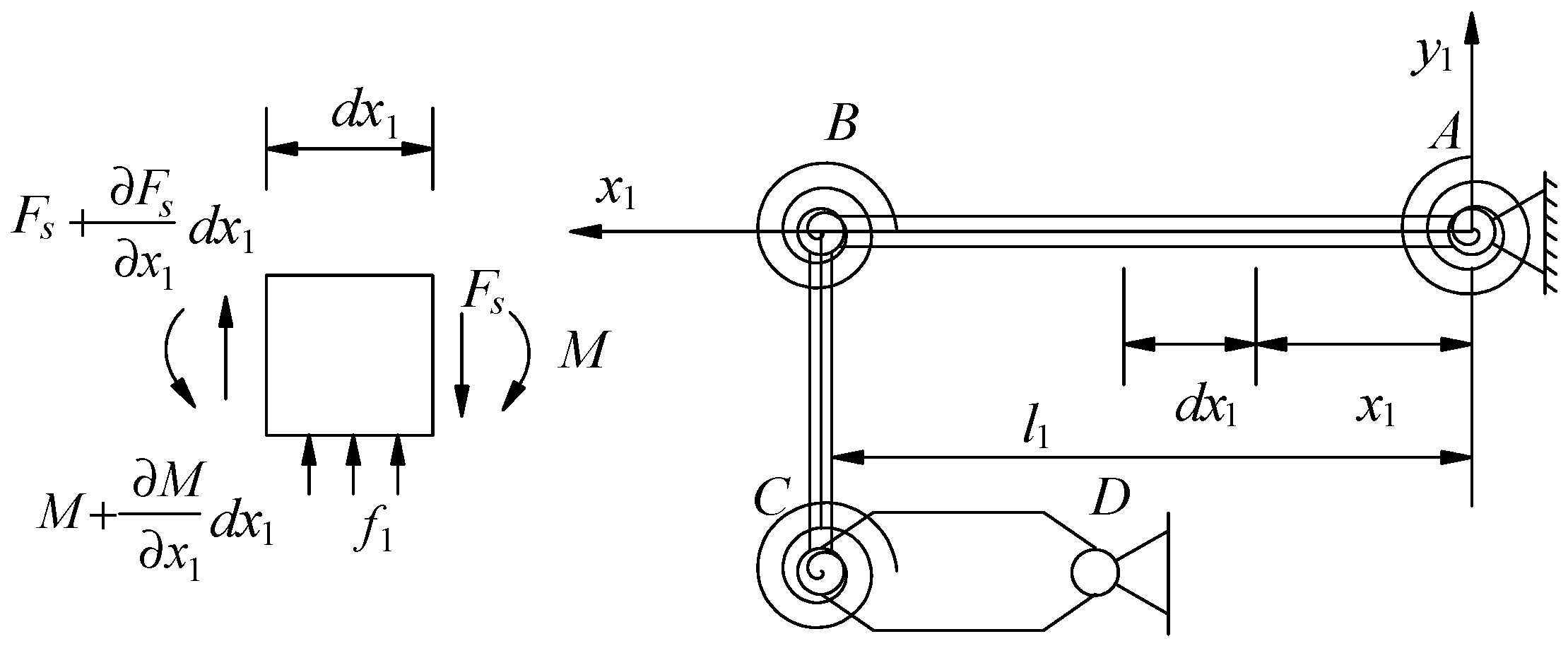
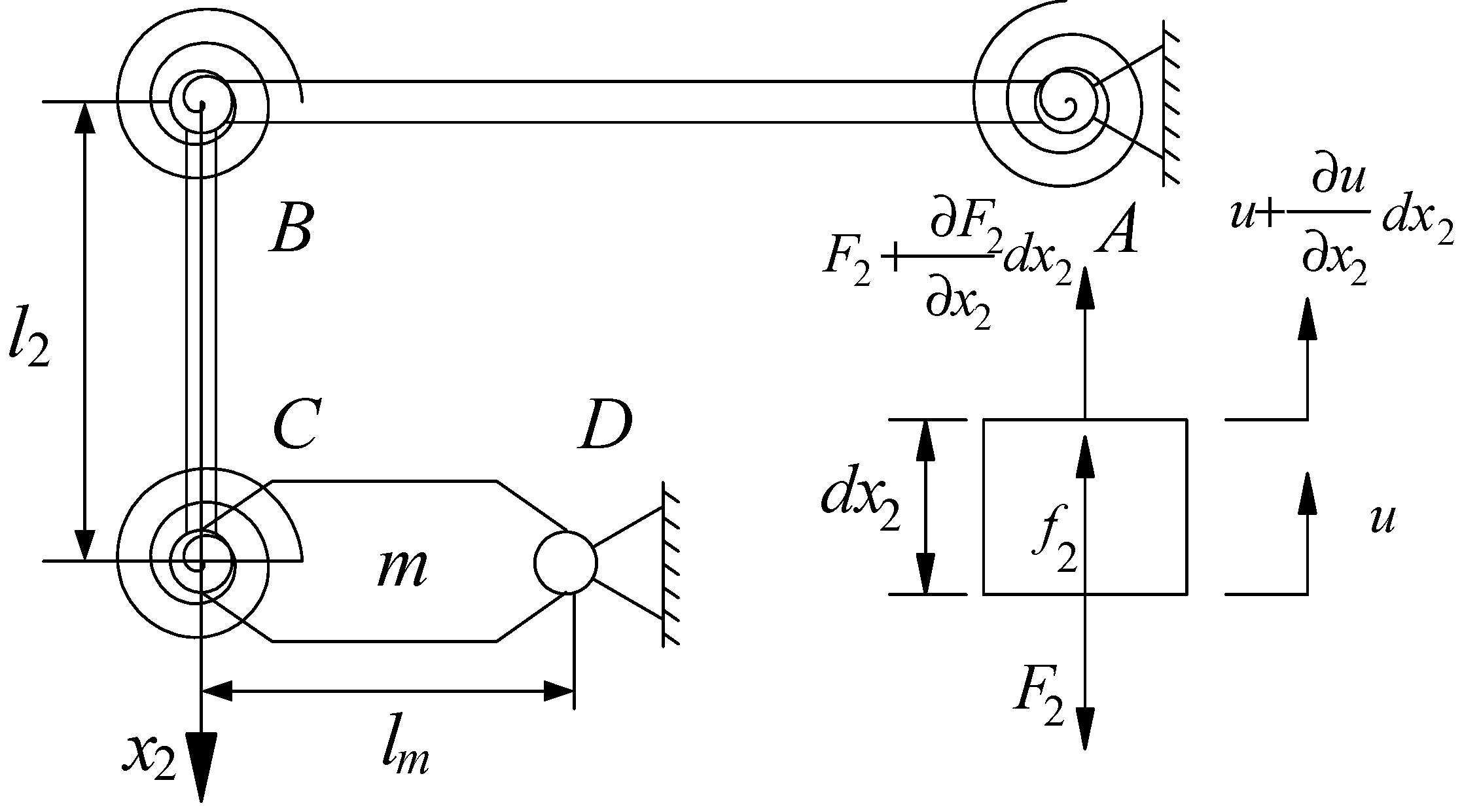
3.2. Free Vibration Modeling of Flexible Amplification Mechanism
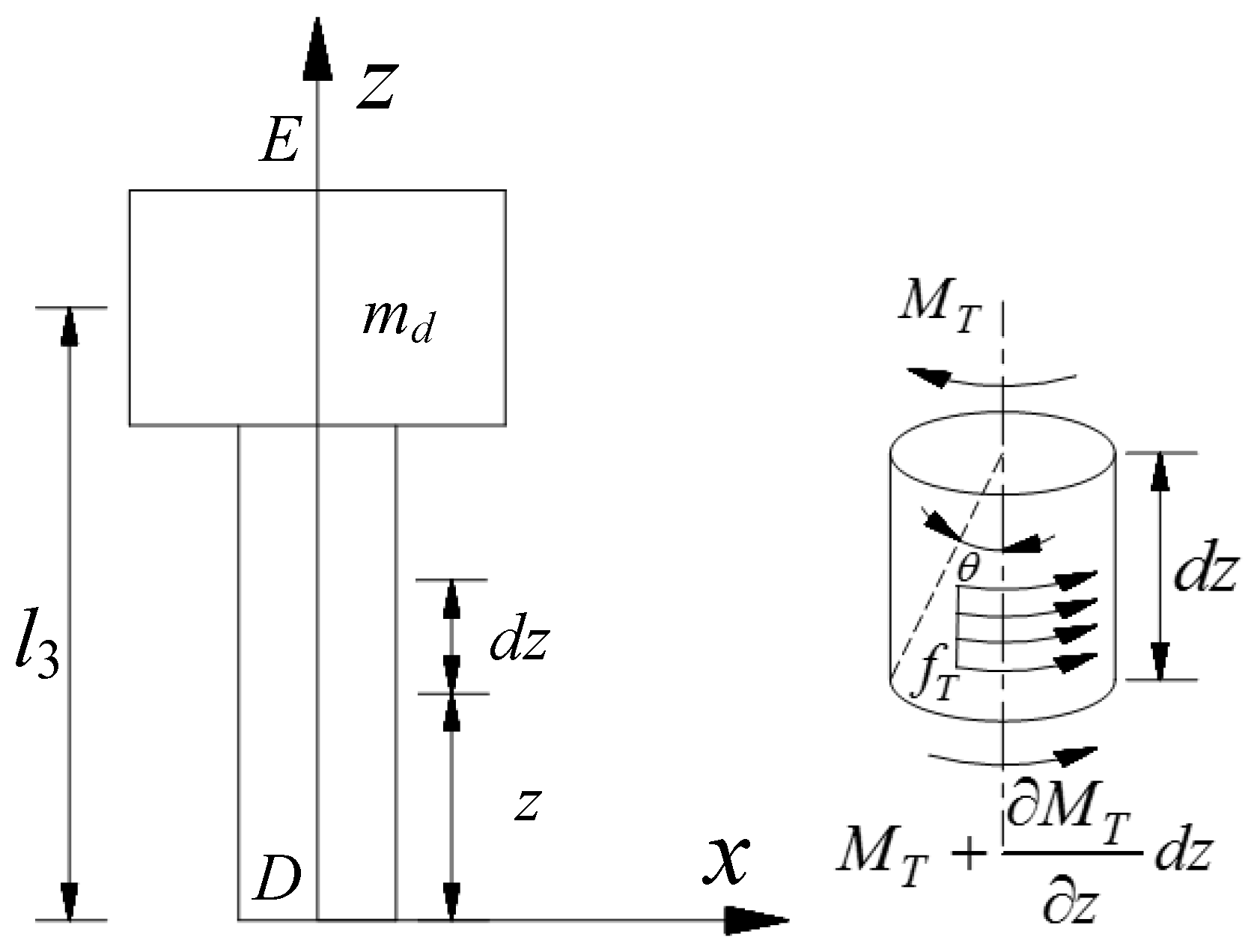
3.3. Free Vibration Modeling of the Intermediate Shaft
3.4. Boundary and Continuity Conditions
- The end Op of piezoelectric stack is the fixed, so the displacement is zero at x = 0. It can be expressed as:
- Regarding the beam AB, the displacement at point A of the driving beam AB is zero, and the bending moment is equal to the reverse moment of the coil spring, so:where k is the bending stiffness of the flexible hinge.
- At the thrust point of the piezoelectric stack, the displacement equals to the elongation of the piezoelectric stack, and the thrust at y = lnp and the shear force at x1 = lFp are equal, so:
- At endpoint B of beam AB, since the flexible hinge provides an elastic resilience, the shear force of point B equals the elastic force of the flexible hinge. It can be expressed as:
- Regarding the beam BC, when the flexible amplification mechanism is operating, beam BC exist a translational motion, and let the translational displacement be xp. Therefore, the displacement of the endpoint B of the beam AB is equal to the sum of the displacement of the endpoint C of the beam BC and the translational displacement xp. In addition, the shear force at x1=l1 and the thrust at x2 = 0 are equal, so:
- At the endpoint C of beam BC, the superposition of the torque generated by the translation of the beam BC and the end moment of the bending beam AB are equal to the reverse moment of the flexible hinge, so:
- For the junction of the intermediate shaft and mass m, the sum of the displacement at point C and the translational displacement xp is equal to the torsional angular displacement times the length lm. The torque at the endpoint E of the intermediate shaft is equal to the reverse torque of the mass md, so the boundary condition of the torsional intermediate shaft is:
4. Result Analysis
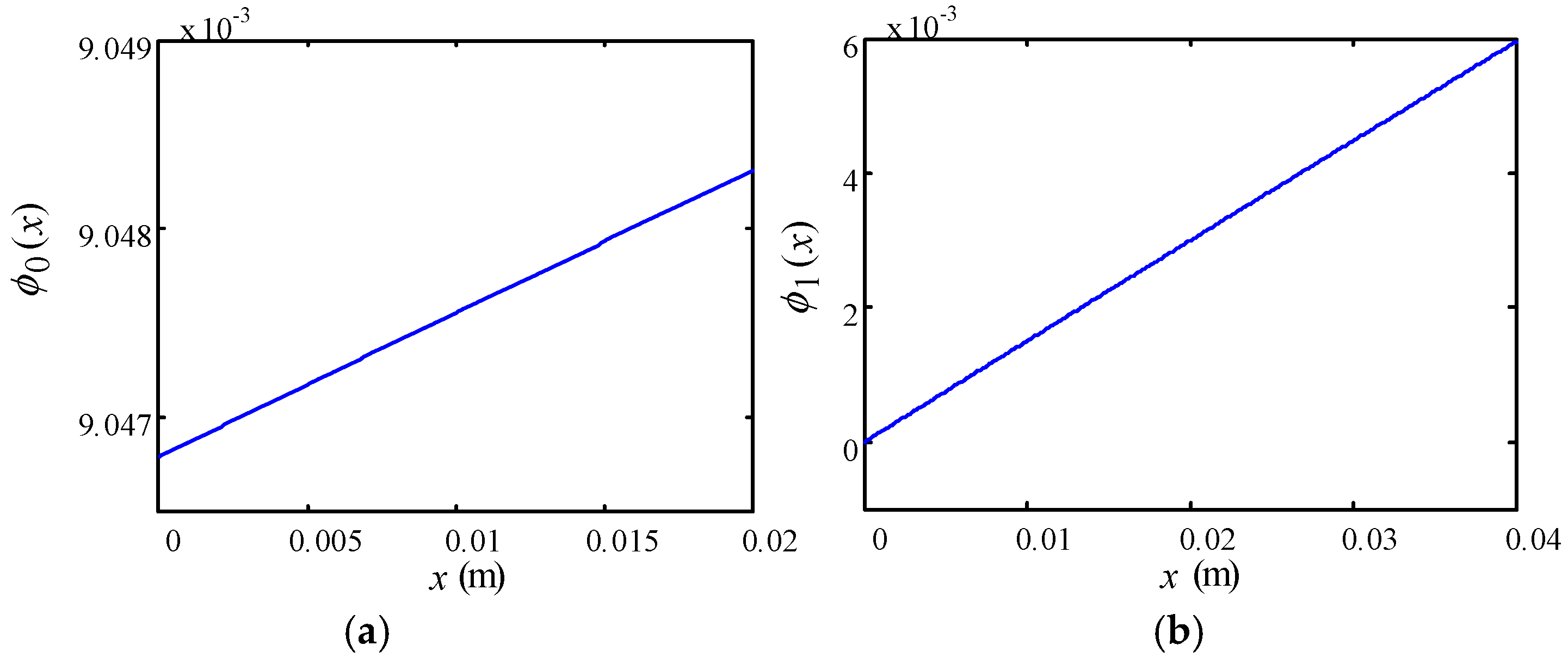
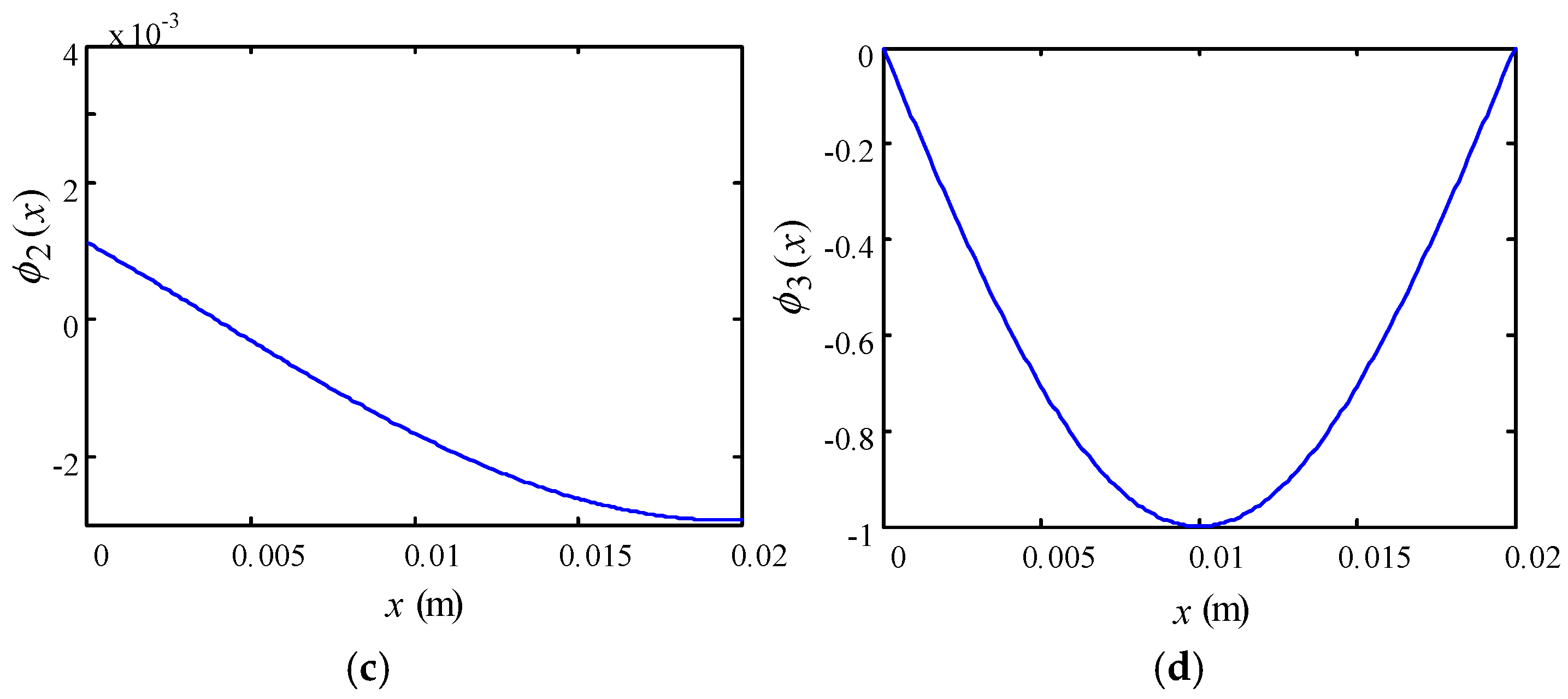
- The natural frequencies of the 2nd and 3rd orders are greatly increased comparing with the 1st order. This is because when the 1st order free vibration is excited, the deflection of the piezoelectric stack, beam AB, and intermediate shaft DE basically present a linear change, and the deformation of the flexible amplification mechanism mainly occurs at the hinge, as shown in Figure 9. In addition, the modal stiffness of the flexure hinge is much smaller than the other beams, so the 1st order natural frequency is much lower than high order natural frequencies.
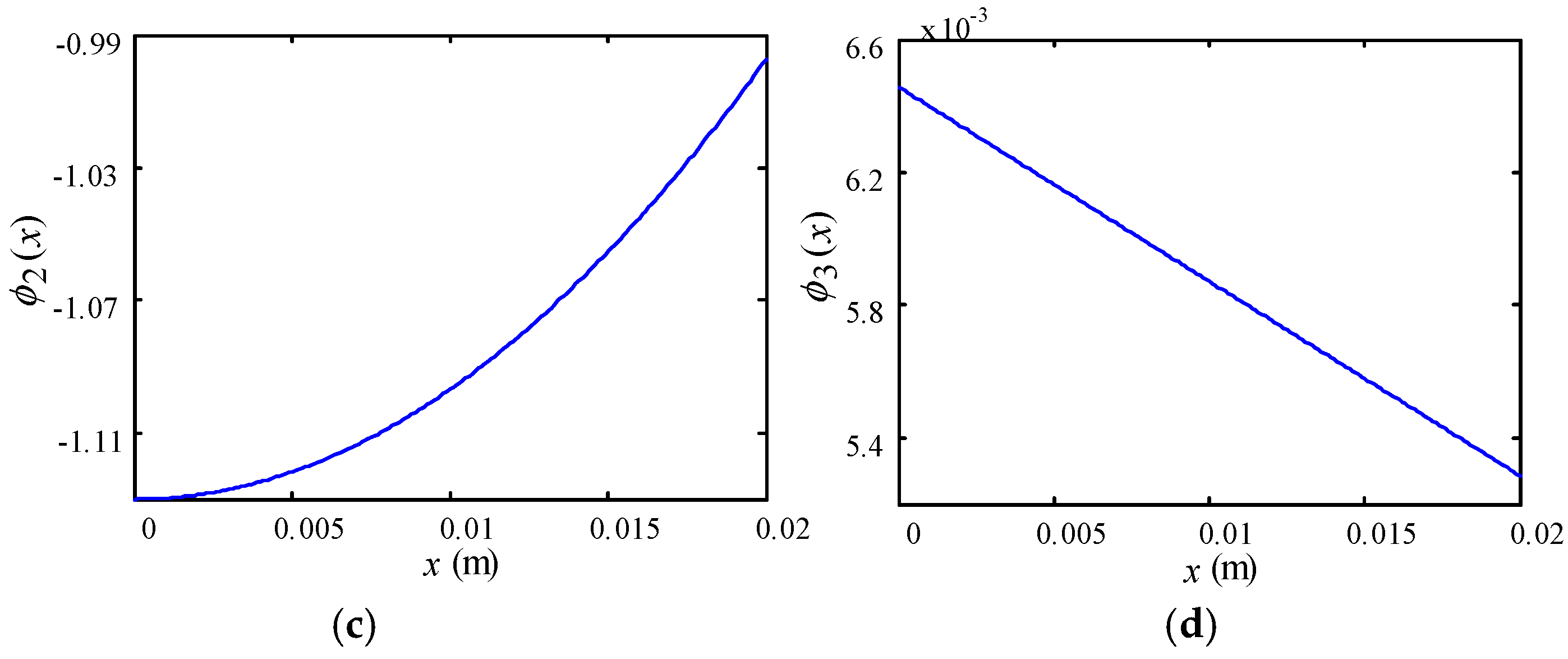
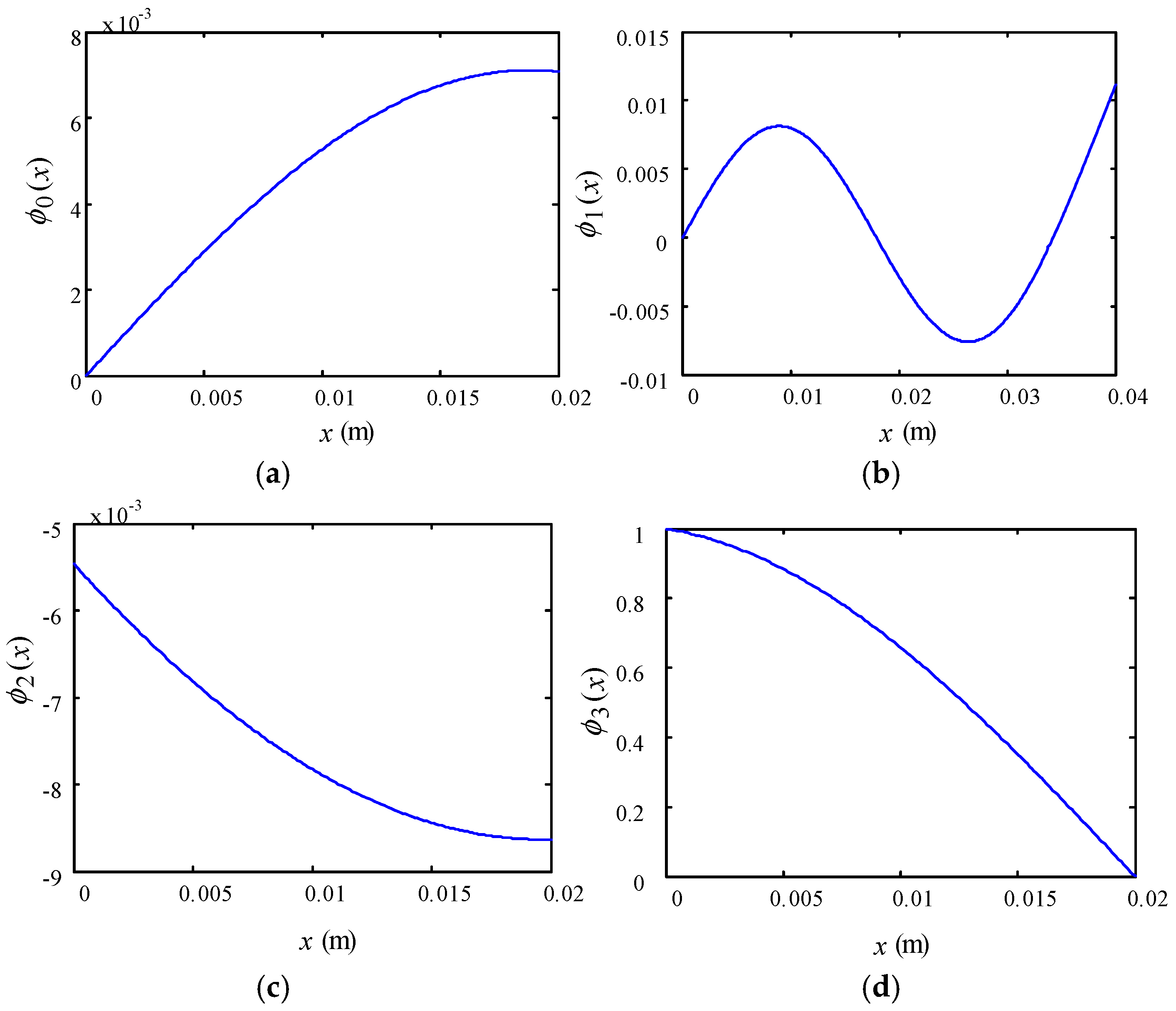
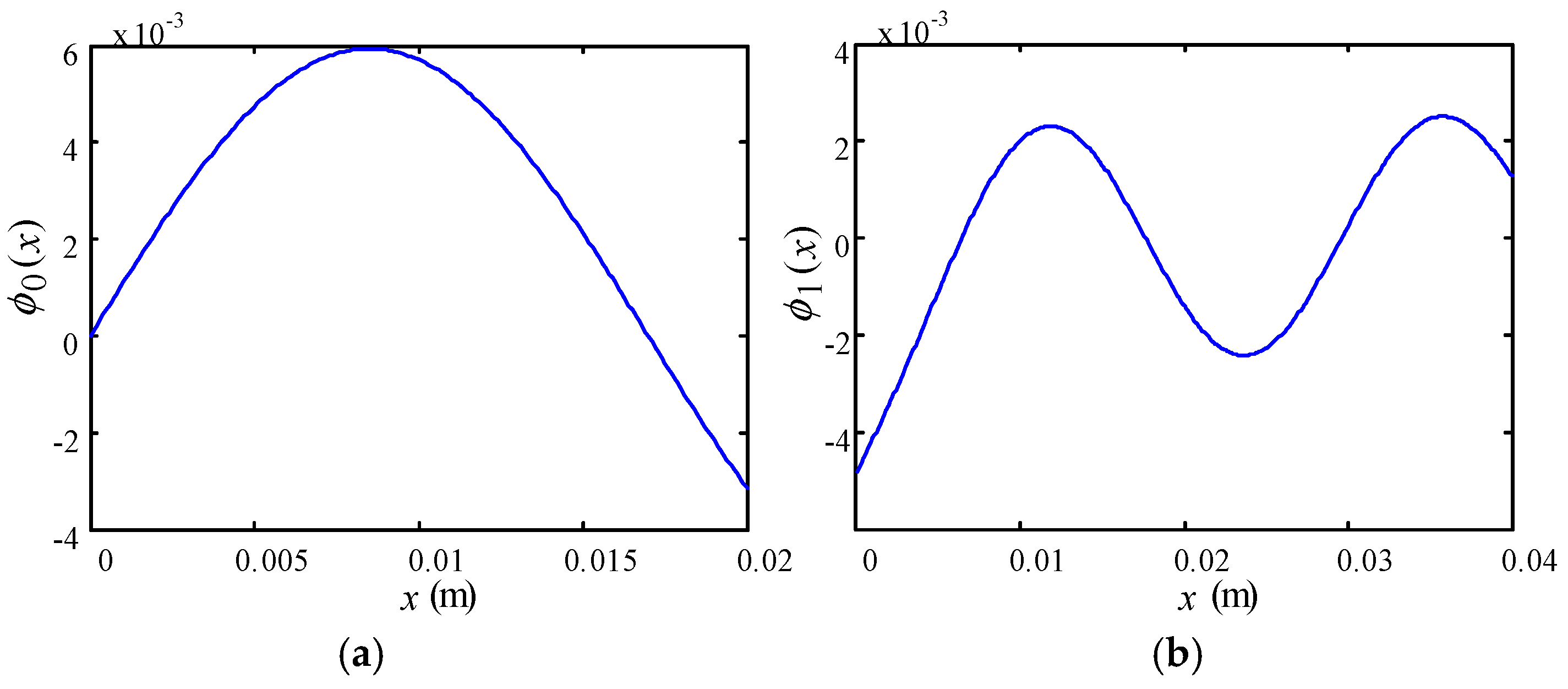
- With the increase of the order, the modal functions of each component begin to present bending deformation. In the 2nd order modal functions curve, the beam AB appears a peak near 0.01 m and a trough near 0.027 m. In the 3rd order modal function curve, the piezoelectric stack appears a peak near 0.008 m, the beam AB appears a trough near 0.023 m and two peaks near 0.012 m and 0.036 m, and the shaft DE appears a trough near 0.01 m. However the beam BC has basically no obvious peaks and troughs.
- Taking into account that the electromagnetic modulation mechanism is not suitable for working at high frequency, when the working frequency is selected to operate the motor, it should be less than the 1st order natural frequency.
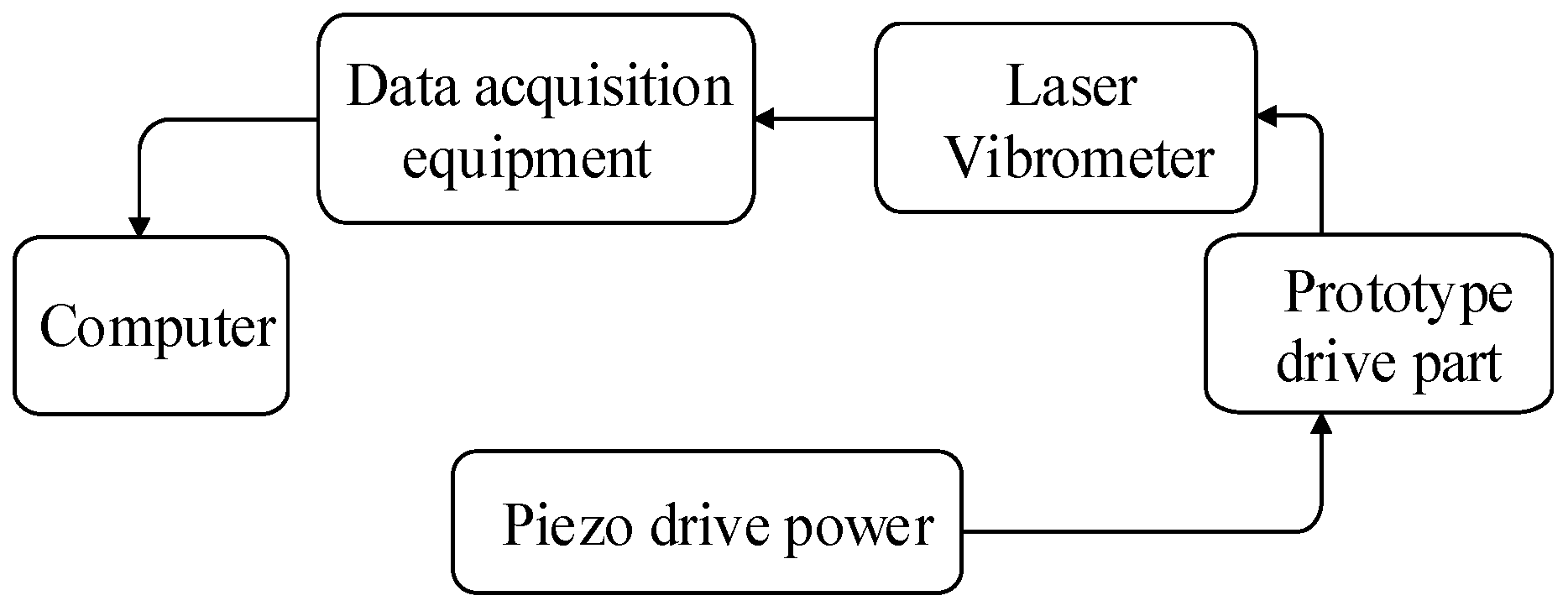
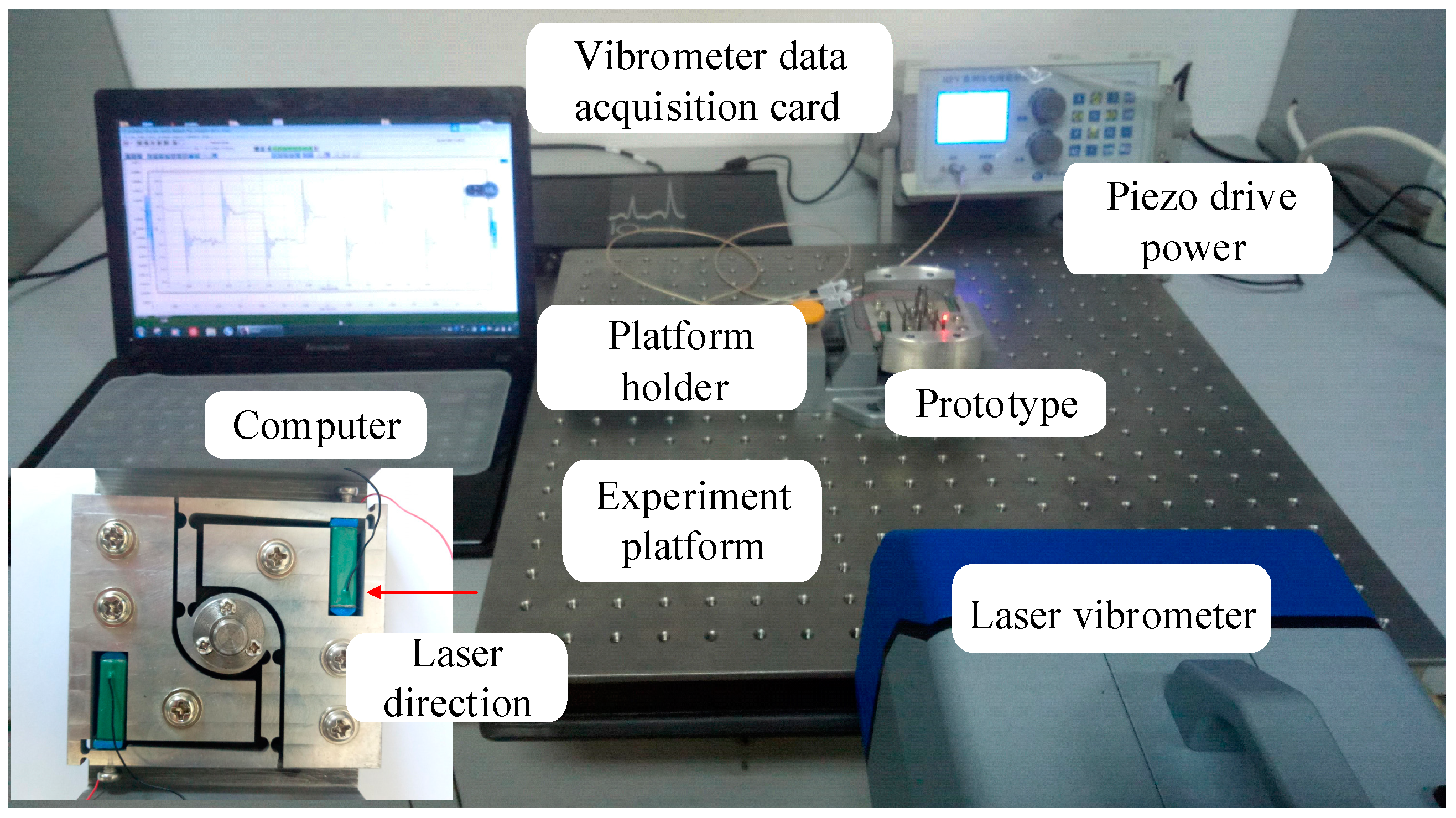
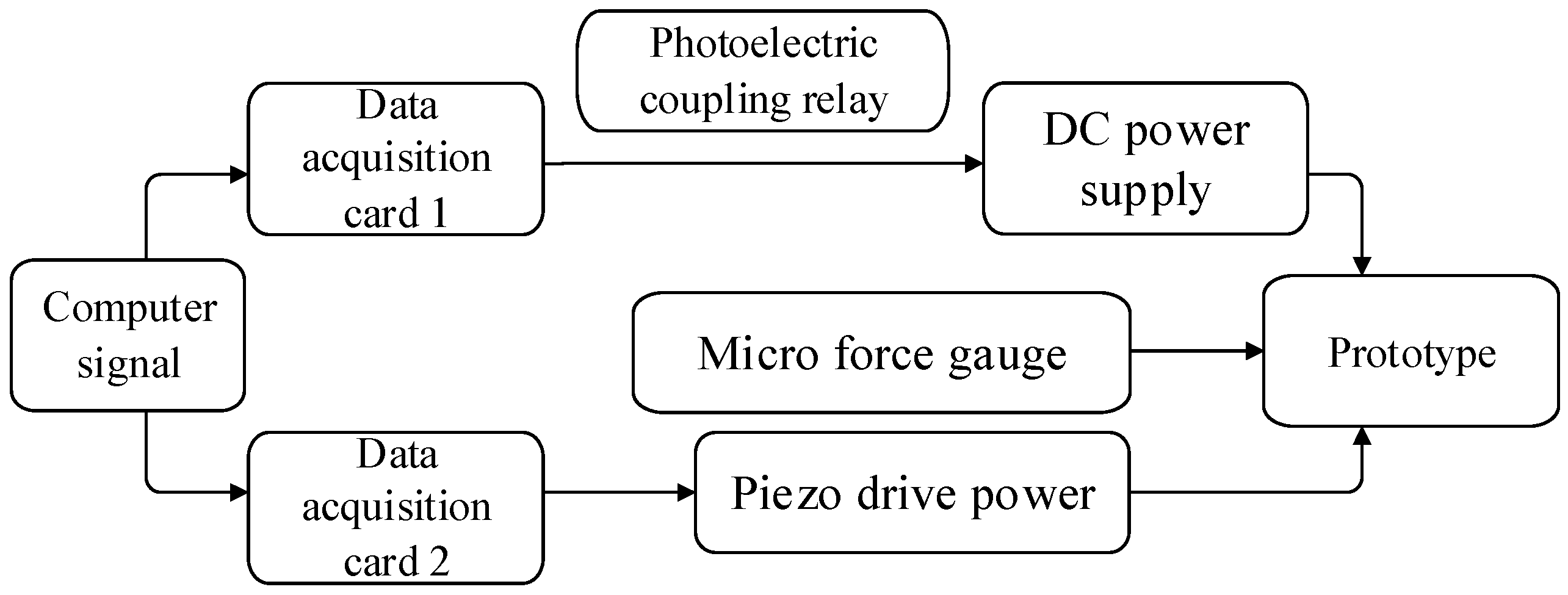
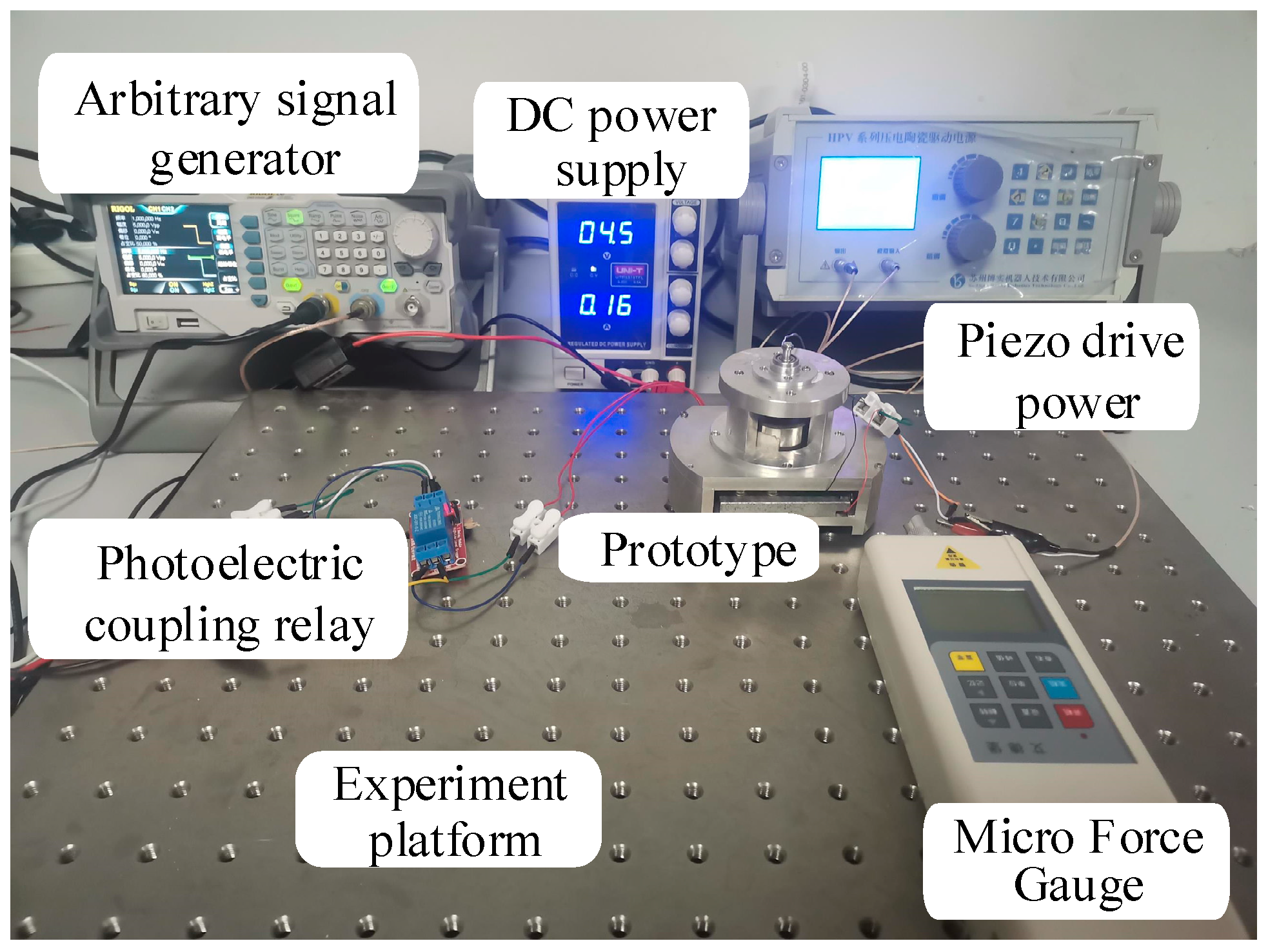
5. Experiment and Discussion
5.1. Test for Free Vibration
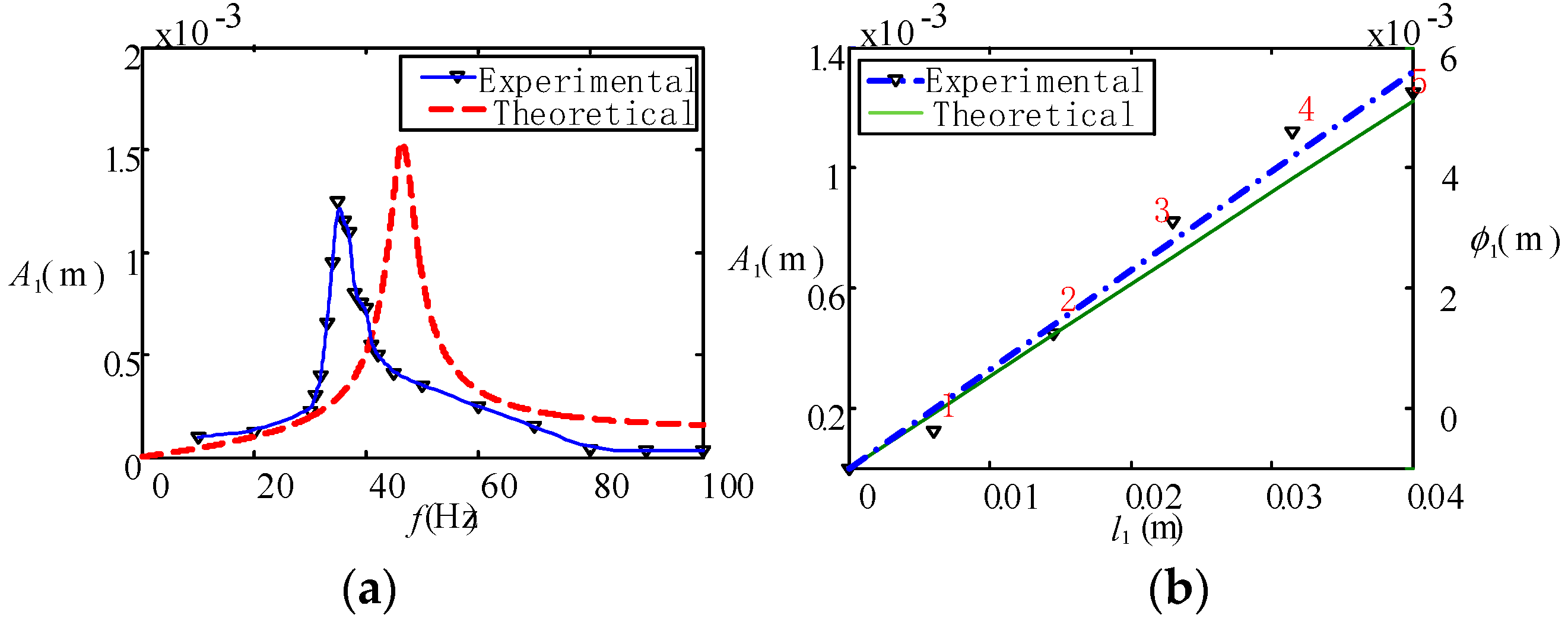
- As shown in Figure 15a, for the 1st order natural frequency, the measured value is 38.5 Hz which is slightly lower than the theoretical value of 46.3 Hz. For the resonance displacement response amplitude of the beam AB end, the measured value is 1.35 mm which also is slightly lower than the theoretical value of 1.55 mm. The errors are 16.3% of the 1st order natural frequency and 12.9% of the response displacement.
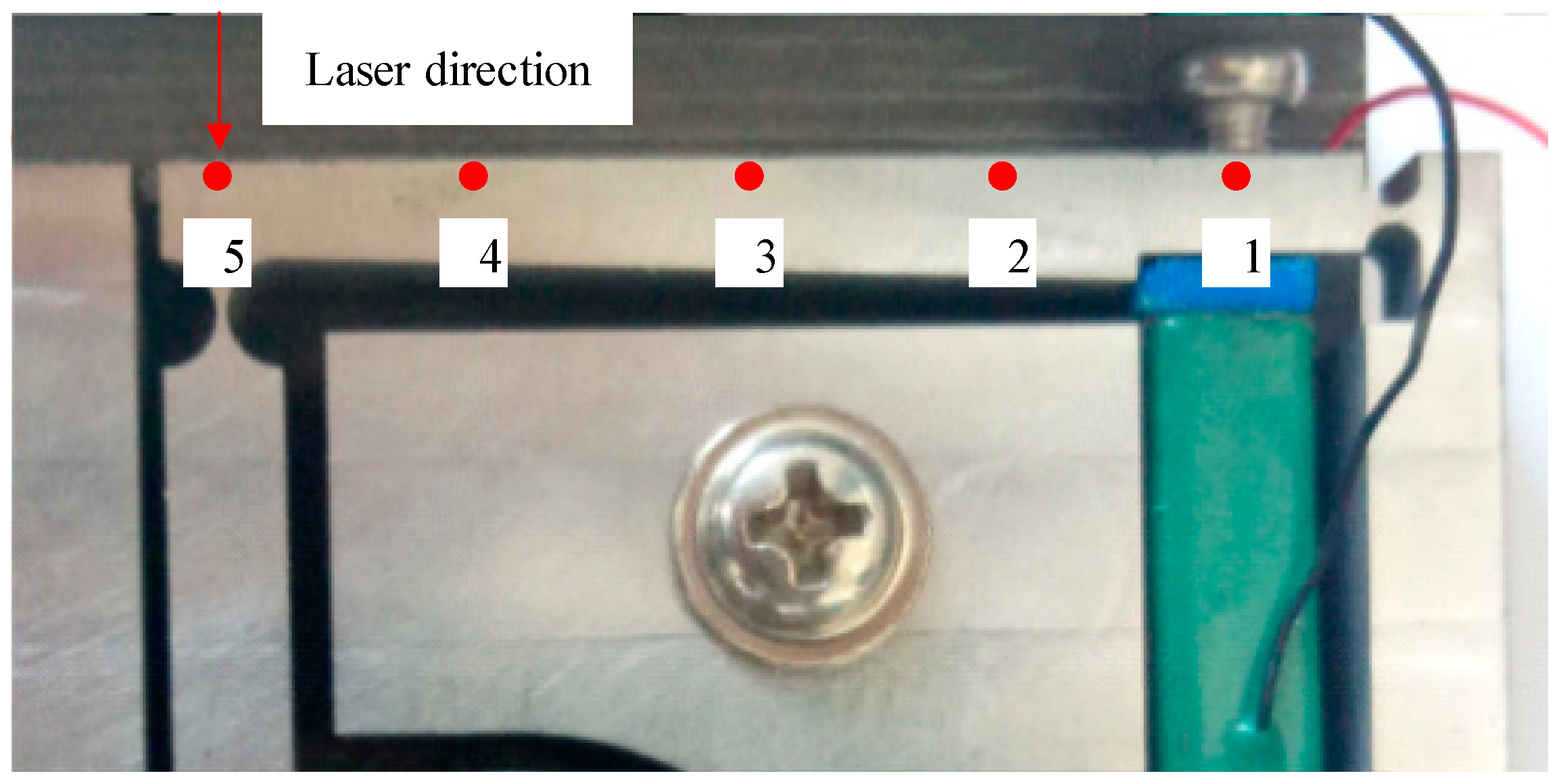
- As shown in Figure 15b, the displacement response of the 5 points marked on the beam AB conforms to the theoretically calculated 1st order free vibration. The resonance response displacement of 5th point is the largest, about 1.35 mm. The 1st point is located at the junction of the driving beam and the piezoelectric stack, and the resonance response displacement is the smallest, about 0.04 mm.
- For the aforementioned errors, two reasons are summarized. The first reason is there was an error in the simplified model. The second reason is there also will be errors in measurement and data processing of the experiment. In addition, a wear-resistant gasket was added between the piezoelectric stack and beam AB, which will affect the experimental results by changing the contact stiffness.
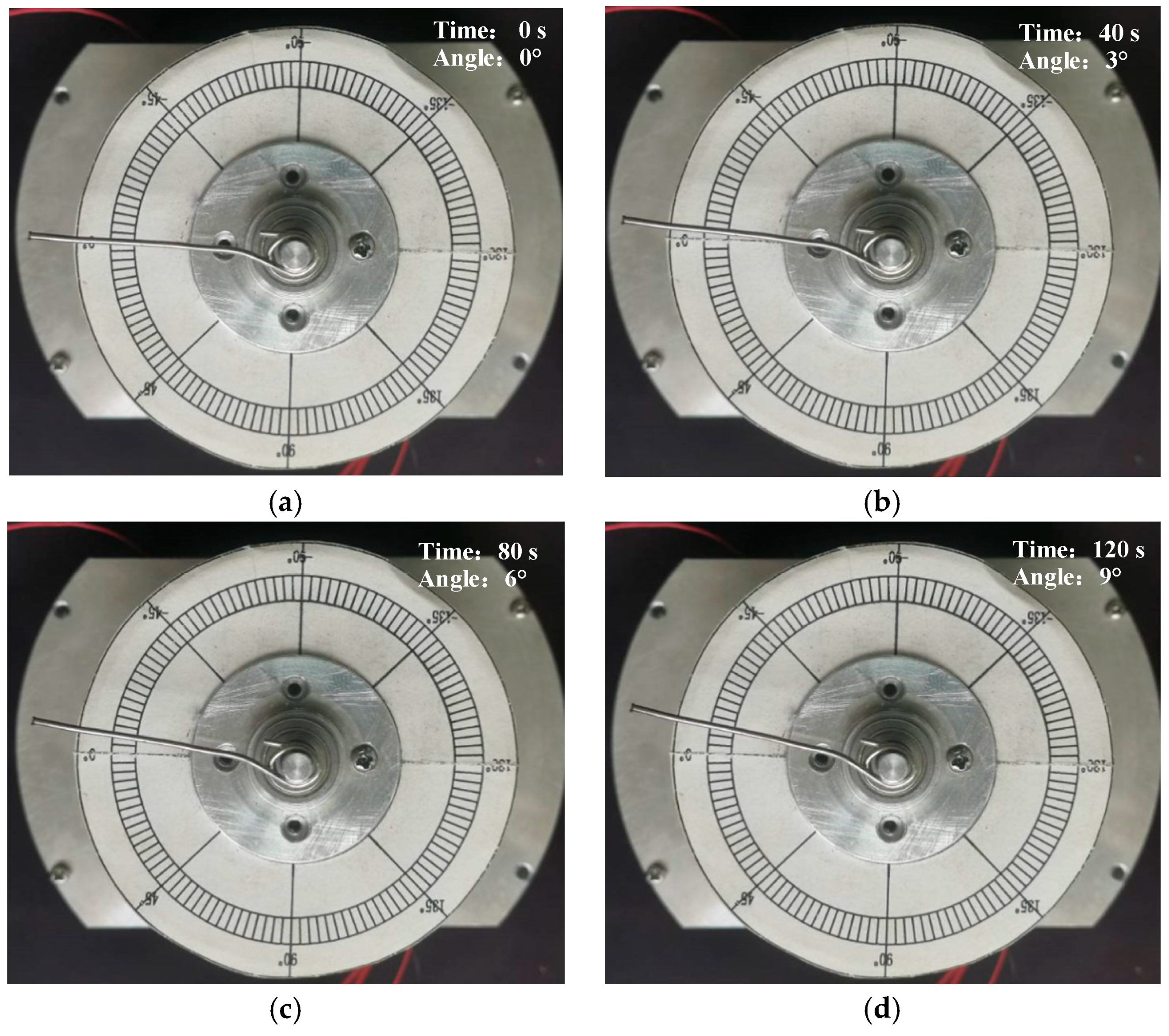
5.2. Test of Output Characteristics
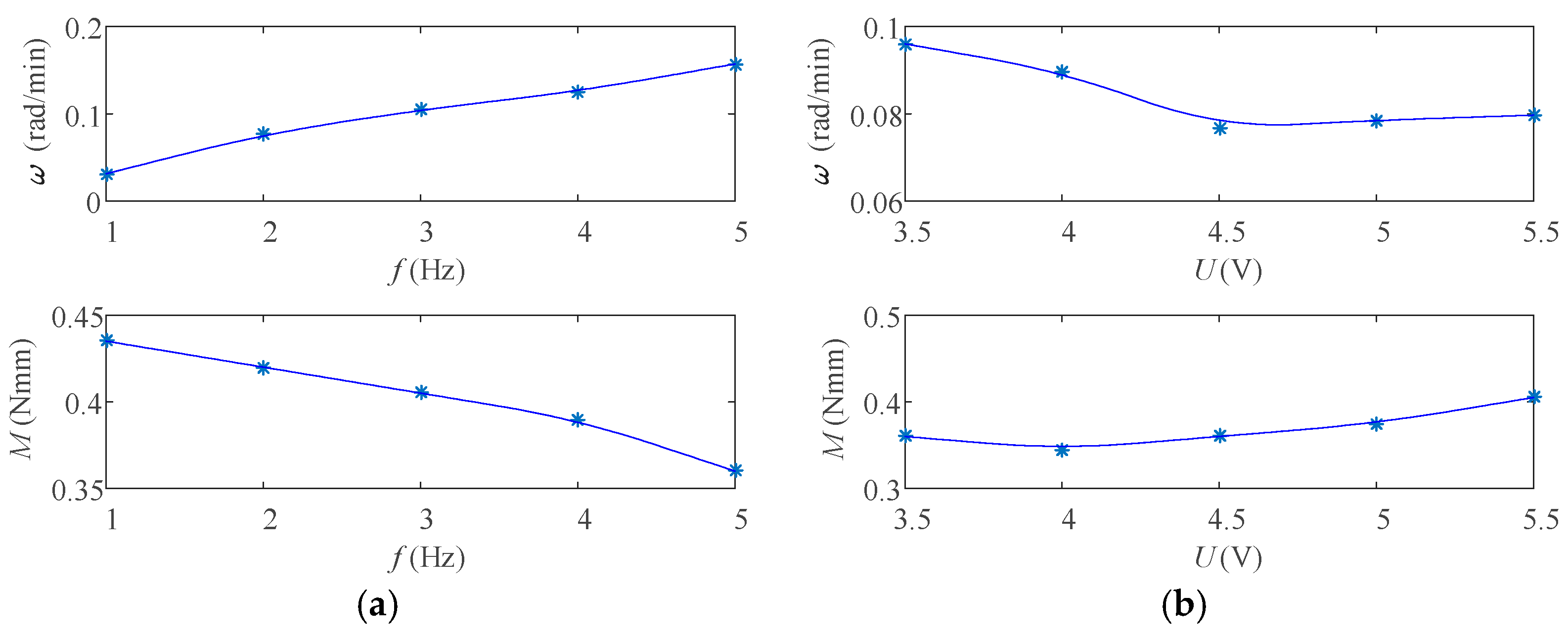
- When the frequency of the driving signal increases, the motor speed gradually increases and the torque gradually decreases. Since the electromagnetic modulation mechanism sensitivity is lower than piezoelectric stack, the driving signal frequency is not suitable as it is too high. In order to maintain the good output performance of the motor, here we take the driving signal frequency of 3 Hz. This not only ensures the normal speed of the motor, but also enables the motor to have a strong load capacity.
- With the increase of the voltage of the electromagnetic driving signal, the motor speed decreases first and then tends to be stable. The overall torque shows a trend of slowly increasing. Since the electromagnetic voltage increases, the disc-shaped slider would be magnetized, which causes it to be unable to separate from electromagnet in time. Therefore, the electromagnetic driving voltage cannot easily exceed 4.5 V.
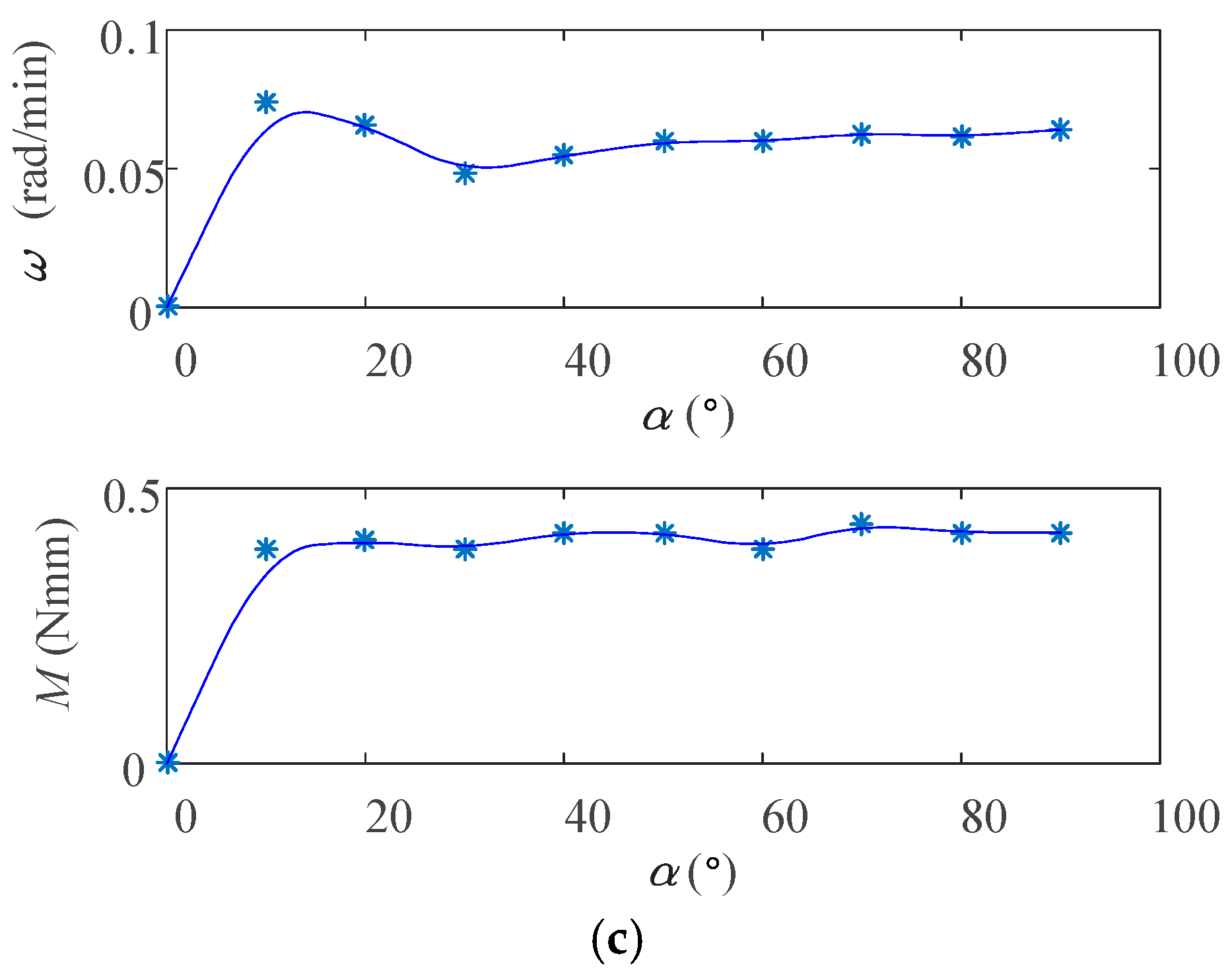
- When increasing the phase difference α between the two drive signals, the motor speed increases first and then tends to be stable, and the change law of the torque is similar to the speed. In order to ensure the normal operation of the motor, the drive signal needs to keep a phase difference. In this way, it can avoid the electromagnet and the disc-shaped slider being unable to separate in time during operation. It explains why there is a time difference Δt between the two excitation signals in the driving principle.
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Tian, X.; Liu, Y.; Deng, J.; Wang, L.; Chen, W. A review on piezoelectric ultrasonic motors for the past decade: Classification, operating principle, performance, and future work perspectives. Sens. Actuators A Phys. 2020, 306, 111971. [Google Scholar] [CrossRef]
- Tsai, X.-H.; Tao, Y.K.; Potsaid, B.M.; Jayaraman, V.; Kraus, M.; Heim, P.J.S.; Hornegger, J.; Mashimo, H.; Cable, A.E. Ultrahigh speed endoscopic optical coherence tomography using micro-motor imaging catheter and VCSEL technology. Biomed. Opt. Express 2013, 4, 1119–1132. [Google Scholar]
- Lee, W.-H.; Kang, C.-Y.; Paik, D.-S.; Ju, B.-K.; Yoon, S.-J. Butterfly-shaped ultra slim piezoelectric ultrasonic linear motor. Sens. Actuators A Phys. 2011, 168, 127–130. [Google Scholar] [CrossRef]
- Erturk, A.; Inman, D. Piezoelectric Energy Harvesting. Bull. Sci. Technol. Soc. 2011, 28, 496–509. [Google Scholar]
- Li, J.; Huang, H.; Morita, T. Stepping piezoelectric actuators with large working stroke for nano-positioning systems: A review. Sens. Actuators A Phys. 2019, 292, 39–51. [Google Scholar] [CrossRef]
- Kuhne, M.; Rochin, R.G.; Cos, R.S.; Rubio-Astorga, G.; Peer, A.; Santiesteban, R. Modeling and Two-Input Sliding Mode Control of Rotary Traveling Wave Ultrasonic Motors. IEEE Trans. Ind. Electron. 2018, 65, 7149–7159. [Google Scholar] [CrossRef] [Green Version]
- Chen, W.-S.; Liu, Y.; Yang, X.; Liu, J. Ring-type traveling wave ultrasonic motor using a radial bending mode [Correspondence]. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2014, 61, 197–202. [Google Scholar] [CrossRef] [PubMed]
- Izuhara, S.; Mashimo, T. Linear piezoelectric motor using a hollow rectangular stator. Sens. Actuators A Phys. 2020, 309, 112002. [Google Scholar] [CrossRef]
- Tahmasebipour, M.; Sangchap, M. A novel high performance integrated two-axis inchworm piezoelectric motor. Smart Mater. Struct. 2019, 29, 015034. [Google Scholar] [CrossRef]
- Xing, J.; Zhang, N.; Li, C. Free vibration analysis of driving mechanisms of a rotary inchworm piezoelectric motor. China Mech. Eng. 2016, 27, 1996–2002. [Google Scholar]
- Dong, H.; Li, T.; Wang, Z.; Ning, Y. Design and experiment of a piezoelectric actuator based on inchworm working principle. Sens. Actuators A Phys. 2020, 306, 111950. [Google Scholar] [CrossRef]
- Andrius, C.; Dalius, M. An inertial piezoelectric plate type rotary motor. Sens. Actuators A Phys. 2017, 263, 131–139. [Google Scholar]
- Wang, L.; Hou, Y.; Zhao, K.; Shen, H.; Wang, Z.; Zhao, C.; Lu, X. A novel piezoelectric inertial rotary motor for actuating micro underwater vehicles. Sens. Actuators A Phys. 2019, 295, 428–438. [Google Scholar] [CrossRef]
- Mazeika, D.; Vasiljev, P.; Bareikis, R.; Borodinas, S. 3DOF High Resolution Inertial Piezoelectric Motor. In Proceedings of the 2019 IEEE International Ultrasonics Symposium (IUS), Glasgow, UK, 6–9 October 2019; Institute of Electrical and Electronics Engineers (IEEE): Glasgow, UK, 2019; pp. 1773–1776. [Google Scholar]
- Ueha, S.; Hashimoto, Y.; Koike, Y. Non-contact transportation using near-field acoustic levitation. Ultrasonics 2000, 38, 26–32. [Google Scholar] [CrossRef]
- Arabaci, T.; Çiçek, Y.; Dilsiz, A.; Erdogan, I.; Köse, Ö.; Kizildag, A. Influence of tip wear of piezoelectric ultrasonic scalers on root surface roughness at different working parameters. A profilometric and atomic force microscopy study. Int. J. Dent. Hyg. 2012, 11, 69–74. [Google Scholar] [PubMed]
- Xing, J.; Cao, C.; Qin, Y.; Ren, W. Tests of a Noncontact Piezoelectric Motor Modulated by an Electromagnetic Field. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2020, 67, 124–130. [Google Scholar] [CrossRef] [PubMed]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ρp (g/cm3) | ρq (g/cm3) | Iq (cm4) | md (kg) | S1 (mm2) |
| 7.5 | 2.81 | 52.08 | 3.58 × 10−3 | 25 |
| S2 (mm2) | ρz (g/cm3) | Lm (mm) | G (Gpa) | J (kg/m2) |
| 20 | 7.85 | 10.77 | 80.7 | 2.11 × 10−3 |
| d33 (C/N) | c33 (Gpa) | lnp (mm) | Ap (mm2) | b (mm) |
| 635 × 10−12 | 55.6 | 20 | 25 | 5 |
| lFp (mm) | l1 (mm) | l2 (mm) | l3 (mm) | E (Gpa) |
| 6 | 40.64 | 19.73 | 20 | 72 |
| Order | Natural Angular Frequency (rad/s) | Natural Frequency (Hz) |
|---|---|---|
| 1 | 291 | 46 |
| 2 | 227,207 | 36,179 |
| 3 | 503,641 | 80,198 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xing, J.; Qin, Y. A Novel Low-Frequency Piezoelectric Motor Modulated by an Electromagnetic Field. Actuators 2020, 9, 85. https://doi.org/10.3390/act9030085
Xing J, Qin Y. A Novel Low-Frequency Piezoelectric Motor Modulated by an Electromagnetic Field. Actuators. 2020; 9(3):85. https://doi.org/10.3390/act9030085
Chicago/Turabian StyleXing, Jichun, and Yong Qin. 2020. "A Novel Low-Frequency Piezoelectric Motor Modulated by an Electromagnetic Field" Actuators 9, no. 3: 85. https://doi.org/10.3390/act9030085
APA StyleXing, J., & Qin, Y. (2020). A Novel Low-Frequency Piezoelectric Motor Modulated by an Electromagnetic Field. Actuators, 9(3), 85. https://doi.org/10.3390/act9030085