An Adaptive Fast Terminal Sliding Mode Controller of Exercise-Assisted Robotic Arm for Elbow Joint Rehabilitation Featuring Pneumatic Artificial Muscle Actuator

Abstract
:1. Introduction
2. Dynamic Model of Robotic Arm
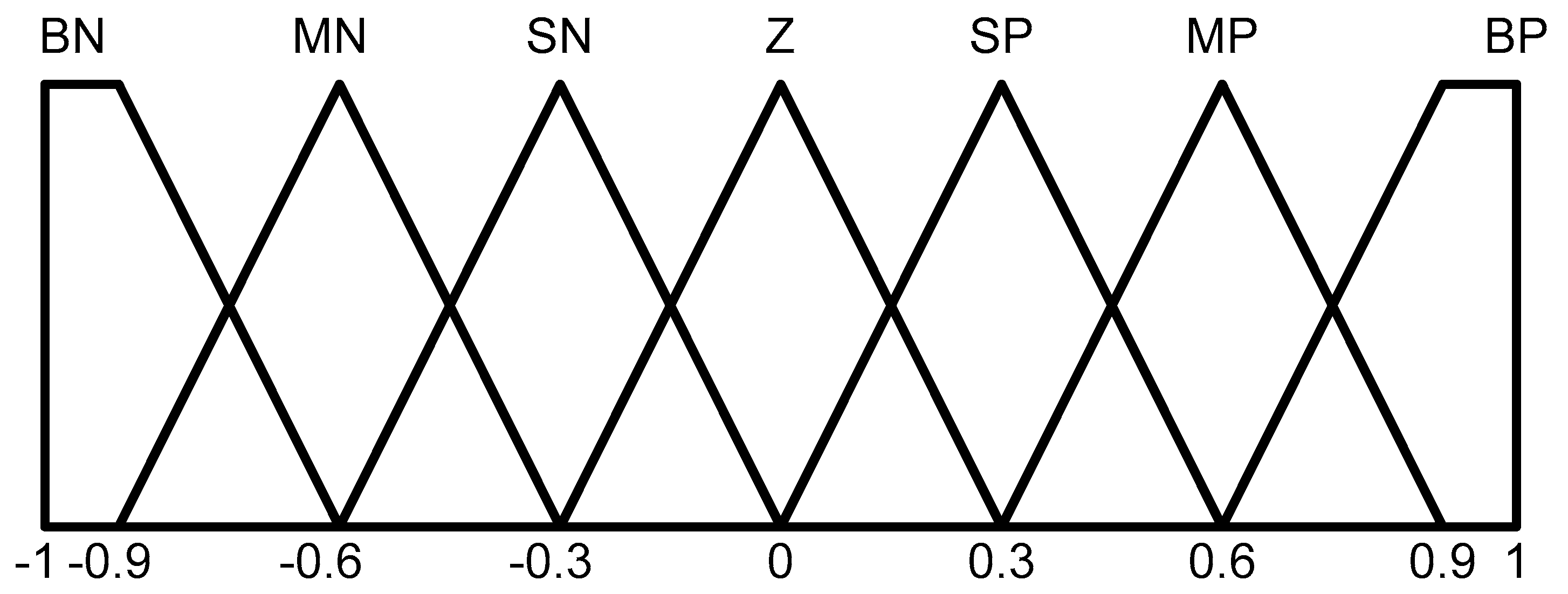
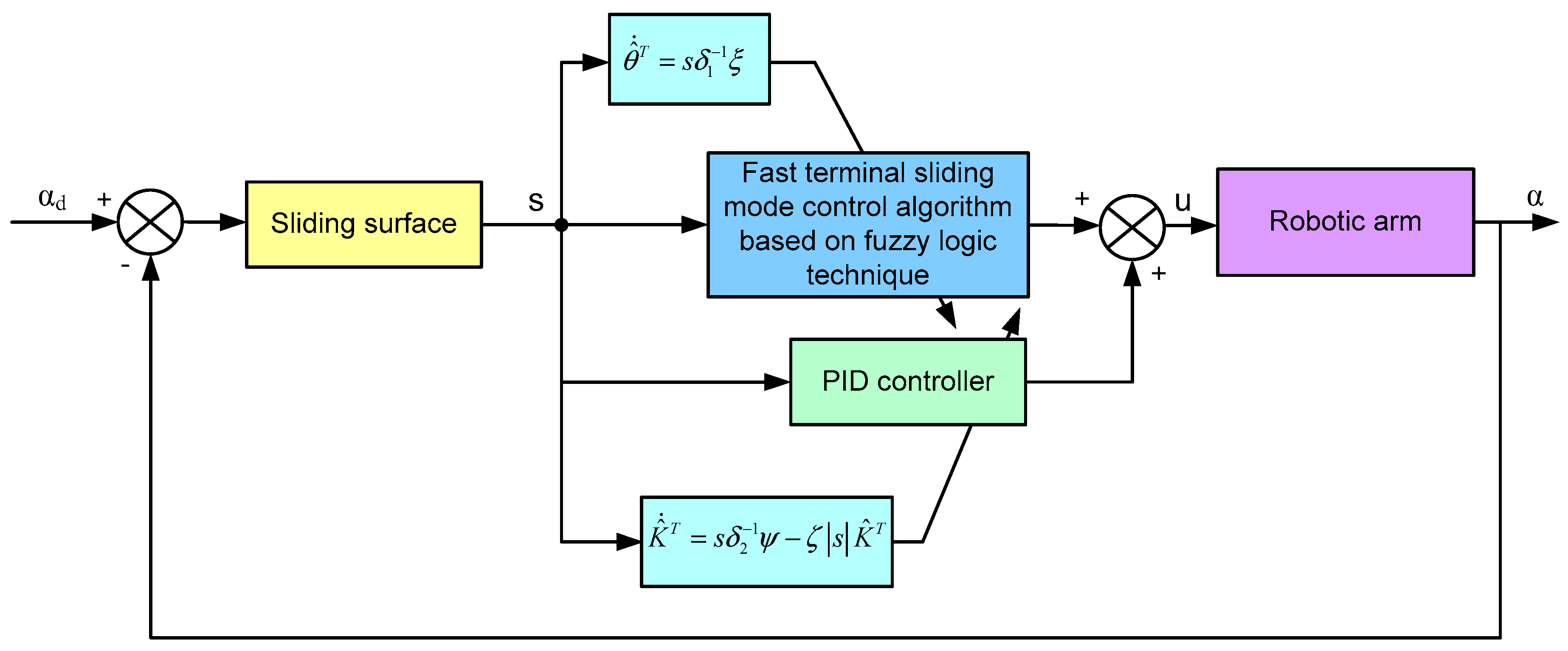
3. Controller Design
4. Experimental Evaluation
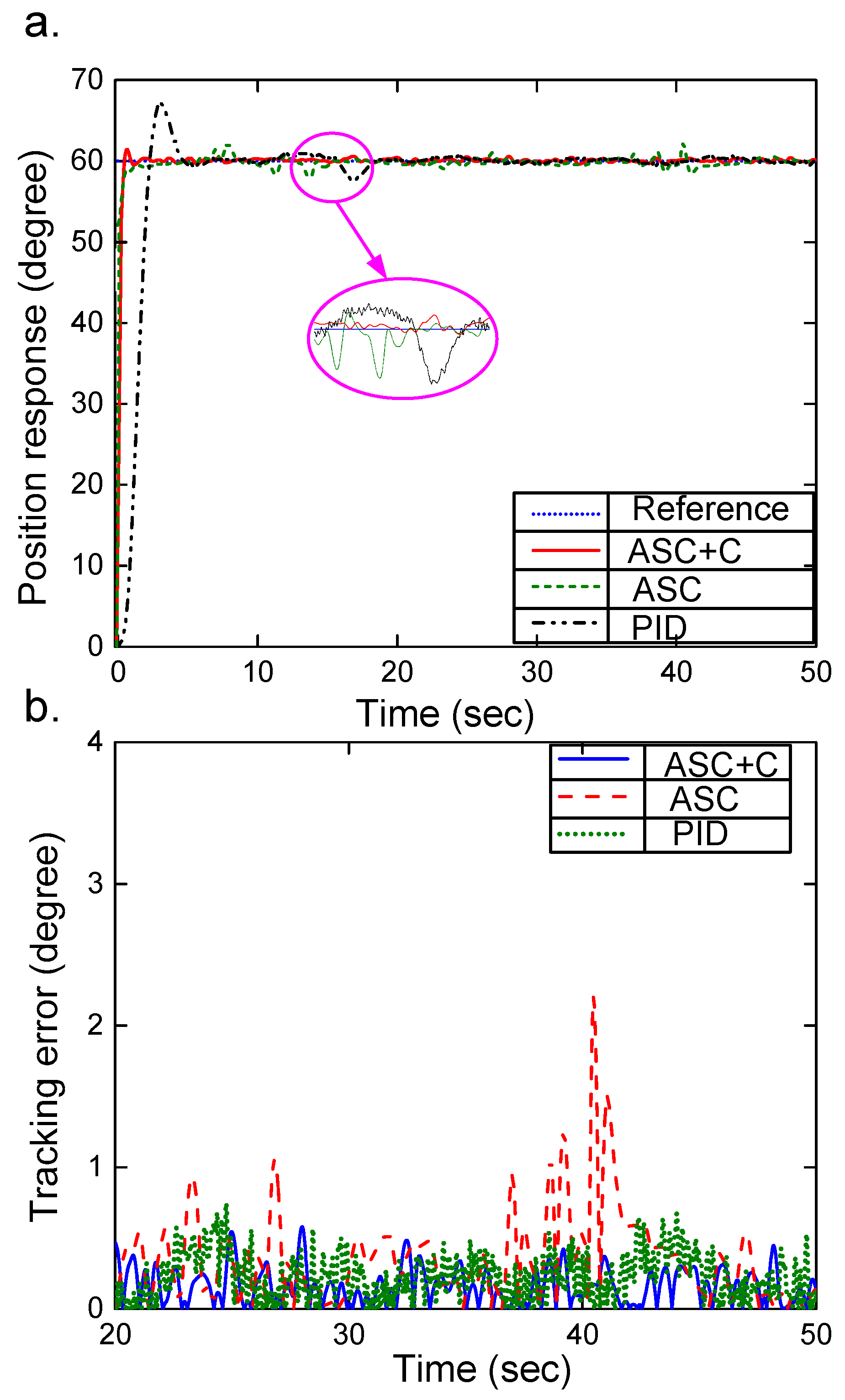
4.1. Results on the 60° Step Command
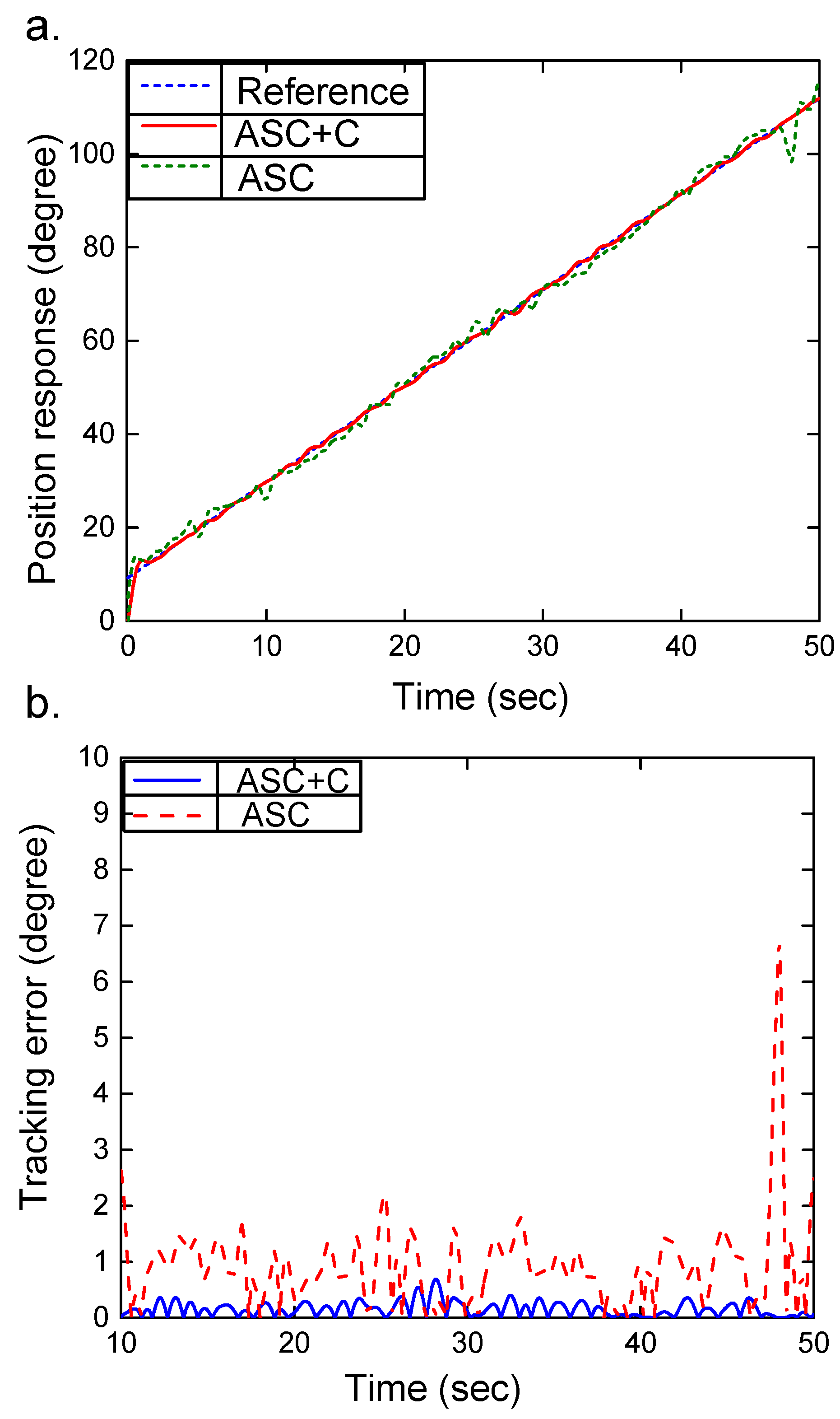
4.2. Results on Ramp Command
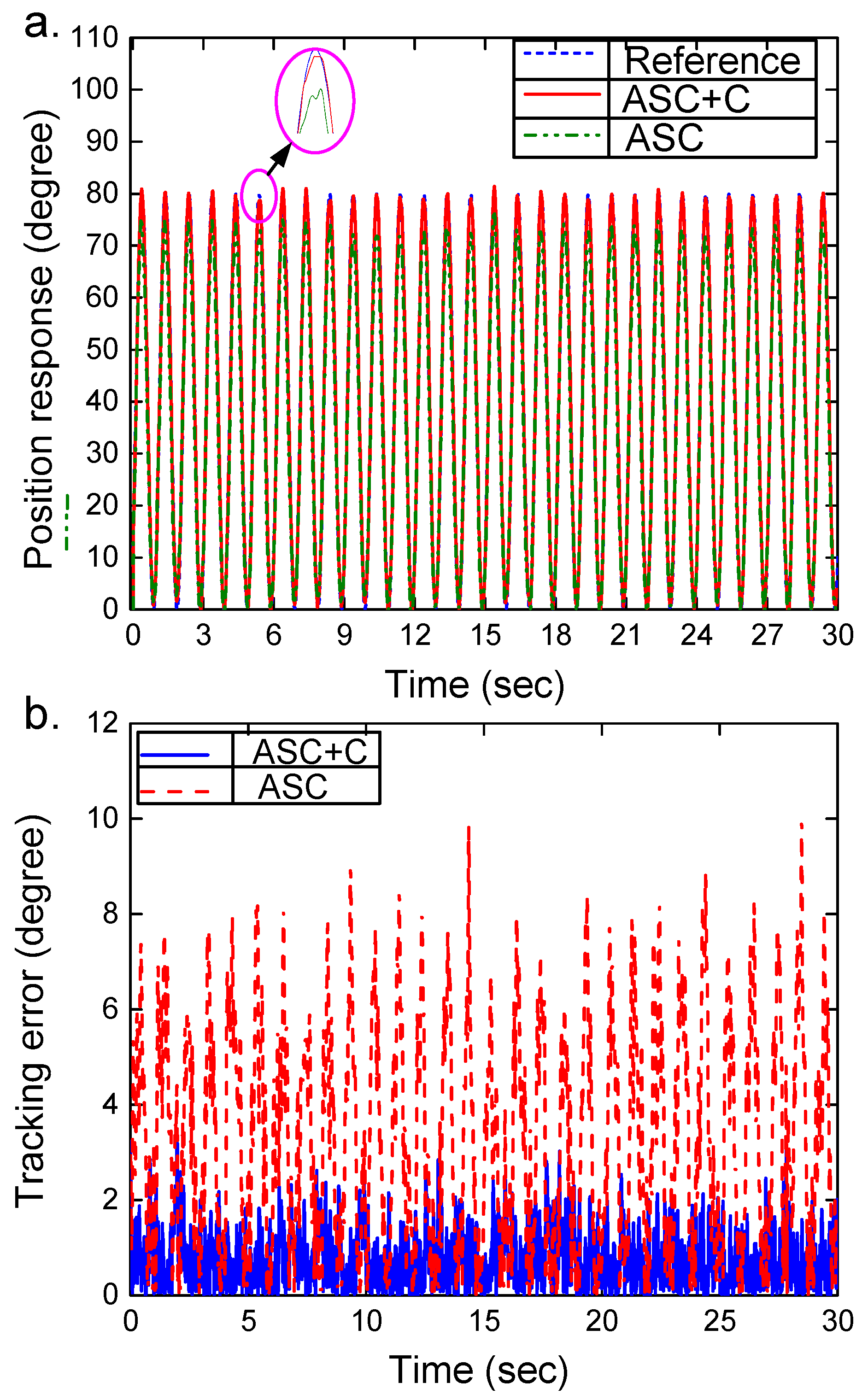
4.3. Results on Sinusoidal Command
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Medical, X. 2019. Available online: https://www.xiangyumedical.com (accessed on 22 November 2020).
- Kinetec. 2019. Available online: https://kinetecuk.com/ (accessed on 22 November 2020).
- Belforte, G.; Eula, G.; Ivanov, A.; Sirolli, S. Soft Pneumatic Actuators for Rehabilitation. Actuators 2014, 3, 84–106. [Google Scholar] [CrossRef] [Green Version]
- Tiboni, M.; Borboni, A.; Faglia, R.; Pellegrini, N. Robotic rehabilitation of the elbow based on surface electromyography signals. Adv. Mech. Eng. 2018, 10. [Google Scholar] [CrossRef]
- Nef, T.; Riener, R. Shoulder actuation mechanisms for arm rehabilitation exoskeletons. In Proceedings of the 2nd IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics, Scottsdale, AZ, USA, 19–22 October 2008. [Google Scholar]
- Yue, Z.; Zhang, X.; Wang, J. Hand rehabilitation robotics on poststroke motor recovery. Behav. Neurol. 2017, 2017, 3908135. [Google Scholar] [CrossRef]
- Aggogeri, F.; Mikolajczyk, T.; O’Kane, J. Robotics for rehabilitation of hand movement in stroke survivors. Adv. Mech. Eng. 2019, 11. [Google Scholar] [CrossRef]
- Torrealba, R.R.; Udelman, S.B.; Rojas, E.D.F. Design of variable impedance actuator for knee joint of a portable human gait rehabilitation exoskeleton. Mech. Mach. Theory 2017, 116, 248–261. [Google Scholar] [CrossRef]
- Kirihara, K.; Saga, N.; Saito, N. Upper limb rehabilitation support device using a pneumatic cylinder. In Proceedings of the 34th Annual Conference of IEEE Industrial Electronics, Orlando, FL, USA, 10–13 November 2008. [Google Scholar]
- Duc, D.M.; Phuoc, P.D.; Tuy, T.X.; Tram, L.T.T. Study on the transient response of lower limb Rehabilitation actuator using the pneumatic cylinder. J. Mechatron. Electr. Power Veh. Technol. 2018, 9, 65–72. [Google Scholar]
- Balasubramanian, S.; Wei, R.; Perez, M.; Shepard, B.; Koeneman, E.; Koeneman, J.; He, J. An exoskeleton robot for assisting rehabilitation of arm functions. In Proceedings of the Virtual Rehabilitation 2008, Vancouver, BC, Canada, 25–27 August 2008. [Google Scholar]
- Nuchkrua, T.; Leephakpreeda, T.; Mekarporn, T. Development of robot hand with pneumatic artificial muscle for rehabilitation application. In Proceedings of the 7th IEEE International Conference on Nano/Molecular Medicine and Engineering, Phuket, Thailand, 10–13 November 2013. [Google Scholar]
- Prado, V.; Sanchez, G.C.; Miguel, B. Control strategy of a pneumatic artificial muscle for an exoskeleton application. IFAC Pap. OnLine 2019, 52, 281–286. [Google Scholar]
- Wang, L.; Peng, G.; Yao, W.; Biggar, S.; Hu, C.; Yin, X.; Fan, Y. Soft robotics for hand rehabilitation. In Intelligent Biomechatronics in Neurorehabilitation; Academic Press: Cambridge, MA, USA, 2020; pp. 167–176. [Google Scholar] [CrossRef]
- Zhong, J.; He, D.; Zhao, C.; Zhi, Y.; Zhang, Q. An rehabilitation robot driven by pneumatic artificial muscle. J. Mech. Med. Biol. 2020, 20, 2040008. [Google Scholar] [CrossRef]
- Horvath, M.A.; Hu, L.; Mueller, T.; Hochstein, J.; Rosalia, L.; Hubbert, K.A.; Hardin, C.C.; Roche, E.T. An organosynthetic soft robotic respiratory simulator. APL Bioeng. 2020, 4, 026108. [Google Scholar] [CrossRef]
- Mirvakili, S.M.; Sim, D.; Hunter, L.W.; Langer, R. Actuation of untethered pneumatic artificial muscles and soft robots using magnetically induced liquid-to-gas phase transition. Sci. Robot. 2020, 5, eaaz4239. [Google Scholar] [CrossRef]
- Miriyev, A.; Stack, K.; Lipson, H. Soft material for soft actuators. Nat. Commun. 2017, 8, 596. [Google Scholar] [CrossRef] [PubMed]
- Kalita, B.; Dwivedy, S.K. Nonlinear dynamics of a parametrically excited pneumatic artificial muscle (PAM) actuator with simultaneous resonance condition. Mech. Mach. Theory 2019, 135, 281–297. [Google Scholar] [CrossRef]
- Capace, A.; Cosentino, C.; Amoto, F.; Merola, A. A Multistable friction model for the compensation of the asymmetric hysteresis in the mechanical response of pneumatic artificial muscle. Actuators 2019, 8, 49. [Google Scholar] [CrossRef] [Green Version]
- Tu, D.C.T.; Tran, T.P. Neural network control of pneumatic artificial muscle manipulation for knee rehabilitation. Sci. Technol. Dev. 2008, 11, 16–29. [Google Scholar]
- Ahn, K.K.; Ho, P.H.A. Design and implementation of an adaptive recurrent neural networks (ARNN) controller of the pneumatic artificial muscle (PAM). Mechatronics 2009, 19, 816–828. [Google Scholar] [CrossRef]
- Yu, R.; Cai, J.; Qian, F. Angle tracking adaptive backstepping control for a pneumatic artificial muscle. In Proceedings of the 2019 Chinese Automation Congress, Hangzhou, China, 22–24 November 2019. [Google Scholar] [CrossRef]
- Rodriguez, M.T.; Banks, S.P.; Salamci, M.U. Sliding mode control for nonlinear systems: An iterative approach. In Proceedings of the 45th IEEE Conference on Decision and Control, San Diego, CA, USA, 13–15 December 2006; pp. 4963–4968. [Google Scholar]
- Shi, G.L.; Shen, W. Hybrid control of a parallel platform based on pneumatic artificial muscles combining sliding mode controller and adaptive fuzzy CMAC. Control Eng. Pract. 2012, 21, 76–86. [Google Scholar] [CrossRef]
- Rezoung, A.; Tondu, B.; Mamerlain, M. Experimental study of nonsingular terminal sliding mode controller for robot arm actuated by pneumatic artificial muscles. IFAC Proc. Vol. 2014, 47, 10113–10118. [Google Scholar] [CrossRef]
- Lin, C.J.; Lin, C.R.; Yu, S.K.; Chen, C.T. Hysteresis modeling and tracking control for dual pneumatic artificial muscle system using Prandtl-Ishlinskii model. Mechatronics 2015, 28, 35–45. [Google Scholar] [CrossRef]
- Zhao, L.; Cheng, H.; Zhang, J.; Xia, Y. Adaptive control for a motion mechanism with pneumatic artificial muscles subject to dead-zones. Mech. Syst. Signal Process. 2021, 148, 107155. [Google Scholar] [CrossRef]
- Chandrapal, M.; Chen, X.Q.; Wang, W.; Hann, C. Nonparametric control algorithm for a pneumatic artificial muscle. Expert Syst. Appl. 2012, 39, 8636–8644. [Google Scholar] [CrossRef]
- Nuchkrua, T.; Leephakpreeda, T. Fuzzy self-turning PID control of Hydrogen driven pneumatic artificial muscle actuator. J. Bionic Eng. 2013, 10, 329–340. [Google Scholar] [CrossRef]
- Robinson, R.M.; Kothera, C.S.; Wereley, M.N. Control of a heavy-lift robotic manipulator with pneumatic artificial muscles. Actuators 2014, 3, 41–65. [Google Scholar] [CrossRef] [Green Version]
- Wang, T.; Chen, X.; Qin, W. A novel adaptive control for reaching movements of an anthropomorphic arm driven by pneumatic artificial muscles. Appl. Soft Comput. 2019, 83, 105623. [Google Scholar] [CrossRef]
- Wu, Y.C.; Chen, F.W.; Liao, T.T.; Chen, C.T. Force reflection in a pneumatic artificial muscle actuated haptic system. Mechatronics 2019, 61, 37–48. [Google Scholar] [CrossRef]
- Chou, C.P.; Hannaford, B. Measurement and modeling of McKibben pneumatic artificial muscles. IEEE Trans. Robot. Autom. 2016, 12, 90–102. [Google Scholar] [CrossRef] [Green Version]
- Beater, P. Pneumatic Drives; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Le, T.D.; Ahn, K.K. Active pneumatic vibration isolation system using negative stiffness structure for vehicle seat. J. Sound Vib. 2014, 333, 1245–1268. [Google Scholar]
- Narendra, K.; Annaswamy, A. A new adaptive law for robust adaptation without persistent excitation. IEEE Trans. Autom. Control 1987, 32, 134–145. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device | Specifications |
|---|---|
| Pneumatic artificial muscle | Maximum pressure: 6 bar; maximum tension: 300 N |
| Spring | Stiffness: 500N/m |
| Proportional pneumatic valve | Voltage: 0–10 V, flow rate: 700 L/min |
| NI card 6221 | Input range: ± 10V, small signal bandwidth: 700 KHz, sample rate: 250KS/s. |
| Encoder | Resolution = 0.1° |
| Parameter | Value |
|---|---|
| 1000 | |
| Positive constant λ1, λ2, λ3, λ4, ξ | 1.53; 2.82; 1.56; 0.82; 0.05 |
| Initial value of state vector θ | [0.0975 0.2785 0.5469 0.9575 0.9649 0.1576 0.9706] |
| Initial value of state vector | [0.957 0.485 0.053] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, H.T.; Trinh, V.C.; Le, T.D. An Adaptive Fast Terminal Sliding Mode Controller of Exercise-Assisted Robotic Arm for Elbow Joint Rehabilitation Featuring Pneumatic Artificial Muscle Actuator. Actuators 2020, 9, 118. https://doi.org/10.3390/act9040118
Nguyen HT, Trinh VC, Le TD. An Adaptive Fast Terminal Sliding Mode Controller of Exercise-Assisted Robotic Arm for Elbow Joint Rehabilitation Featuring Pneumatic Artificial Muscle Actuator. Actuators. 2020; 9(4):118. https://doi.org/10.3390/act9040118
Chicago/Turabian StyleNguyen, Huu Tho, Van Chon Trinh, and Thanh Danh Le. 2020. "An Adaptive Fast Terminal Sliding Mode Controller of Exercise-Assisted Robotic Arm for Elbow Joint Rehabilitation Featuring Pneumatic Artificial Muscle Actuator" Actuators 9, no. 4: 118. https://doi.org/10.3390/act9040118
APA StyleNguyen, H. T., Trinh, V. C., & Le, T. D. (2020). An Adaptive Fast Terminal Sliding Mode Controller of Exercise-Assisted Robotic Arm for Elbow Joint Rehabilitation Featuring Pneumatic Artificial Muscle Actuator. Actuators, 9(4), 118. https://doi.org/10.3390/act9040118