Fault Estimation and Fault-Tolerant Control for the Pump-Controlled Electrohydraulic System



Abstract
:1. Introduction
2. System Modeling and Problem Statement
2.1. Mechanical Dynamics
2.2. Hydraulic Dynamics
3. Fault-Observer-Based Tolerant Controller Design
3.1. Extended State Observer for Internal Leakage Fault Estimation
3.2. Disturbance Observer for External Force Estimation
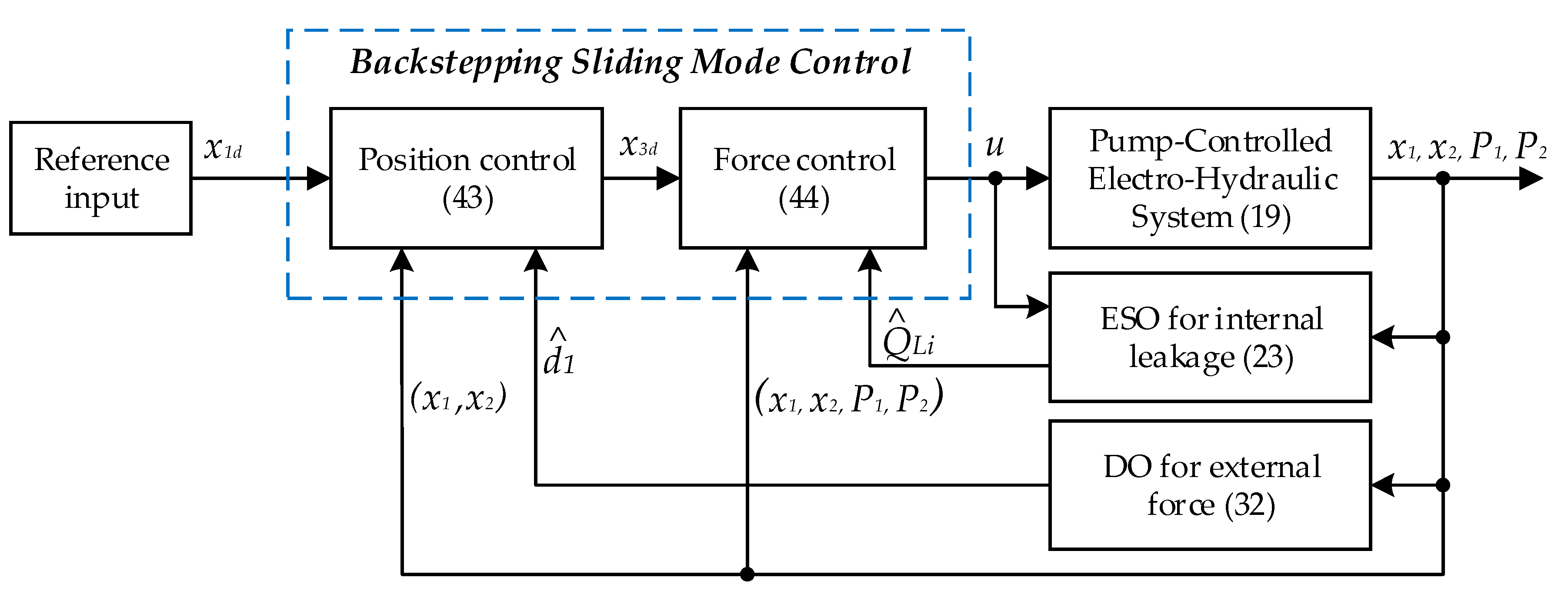
3.3. Backstepping Sliding Mode Controller Design
3.4. Stability Analysis
4. Simulation Results
4.1. Simulation Descriptions
4.2. Simulation Results
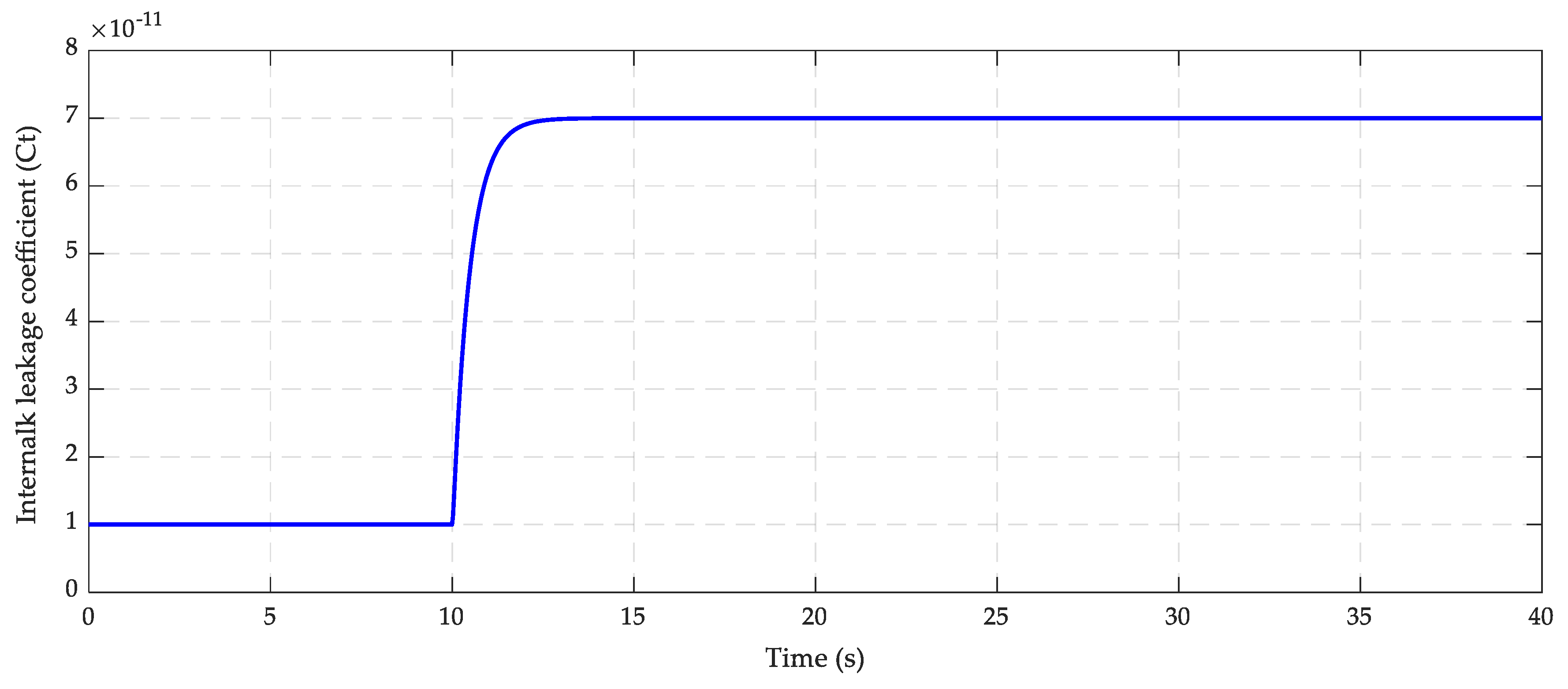
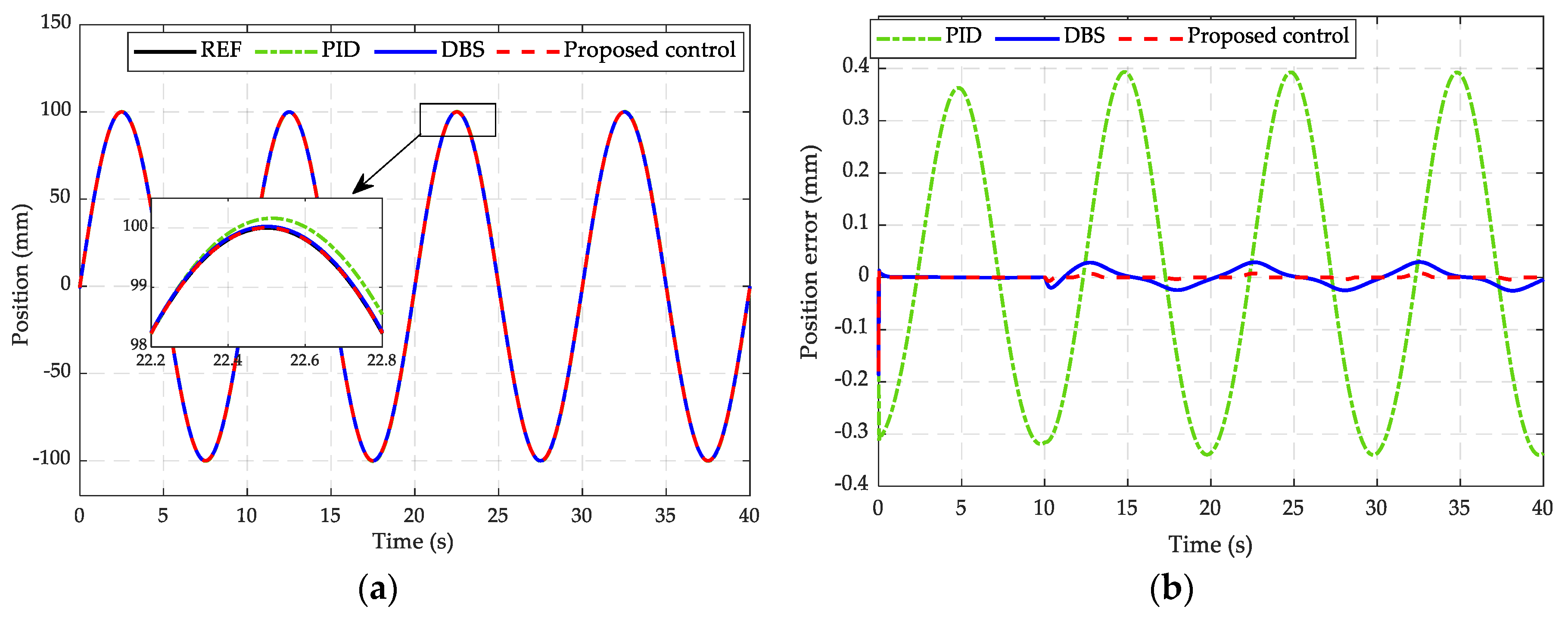
4.2.1. The First Simulation Case
4.2.2. The Second Simulations Case
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
Appendix B
References
- Alle, N.; Hiremath, S.S.; Makaram, S.; Subramaniam, K.; Talukdar, A. Review on electro hydrostatic actuator for flight control. Int. J. Fluid Power 2016, 17, 125–145. [Google Scholar] [CrossRef]
- Jelali, M.; Kroll, A. Hydraulic Servo-Systems: Modelling, Identification and Control; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2003. [Google Scholar]
- Koivumäki, J.; Mattila, J. High performance nonlinear motion/force controller design for redundant hydraulic construction crane automation. Autom. Constr. 2015, 51, 59–77. [Google Scholar] [CrossRef]
- Yao, J.; Jiao, Z.; Ma, D.; Yan, L. High-Accuracy Tracking Control of Hydraulic Rotary Actuators with Modeling Uncertainties. IEEE/ASME Trans. Mechatron. 2013, 19, 633–641. [Google Scholar] [CrossRef]
- Do, T.C.; Tran, D.T.; Dinh, T.Q.; Ahn, K.K. Tracking control for an Electro-hydraulic rotary actuator using fractional order fuzzy PID controller. Electronics 2020, 9, 926. [Google Scholar] [CrossRef]
- Tri, N.M.; Nam, D.N.C.; Park, H.G.; Ahn, K.K. Trajectory control of an electro hydraulic actuator using an iterative backstepping control scheme. Mechatronics 2015, 29, 96–102. [Google Scholar] [CrossRef]
- Ahn, K.K.; Nam, D.N.C.; Jin, M. Adaptive backstepping control of an electrohydraulic actuator. IEEE/ASME Trans. Mechatron. 2014, 19, 987–995. [Google Scholar] [CrossRef]
- Tri, N.M.; Ba, D.X.; Ahn, K.K. A Gain-Adaptive Intelligent Nonlinear Control for an Electrohydraulic Rotary Actuator. Int. J. Precis. Eng. Manuf. 2018, 19, 665–673. [Google Scholar] [CrossRef]
- Tran, D.T.; Ba, D.X.; Ahn, K.K. Adaptive Backstepping Sliding Mode Control for Equilibrium Position Tracking of an Electrohydraulic Elastic Manipulator. IEEE Trans. Ind. Electron. 2020, 67, 3860–3869. [Google Scholar] [CrossRef]
- Guo, H.; Wei, T.; Ding, X.; Duan, C. Multi-Objective Optimal Design of Electro-Hydrostatic Actuator Driving Motors for Low Temperature Rise and High Power Weight Ratio. Energies 2018, 11, 1173. [Google Scholar] [CrossRef] [Green Version]
- Ali, A.; Farid, S.; Saeed, H. Adaptive reliable H∞ control of uncertain affine nonlinear systems. Int. J. Control. Autom. Syst. 2018, 16, 2665–2675. [Google Scholar] [CrossRef]
- Tran, D.-T.; Do, T.-C.; Ahn, K.K. Extended High Gain Observer-Based Sliding Mode Control for an Electro-hydraulic System with a Variant Payload. Int. J. Precis. Eng. Manuf. 2019, 20, 2089–2100. [Google Scholar] [CrossRef]
- Yao, J.; Jiao, Z.; Ma, D. Extended-State-Observer-Based Output Feedback Nonlinear Robust Control of Hydraulic Systems with Backstepping. IEEE Trans. Ind. Electron. 2014, 61, 6285–6293. [Google Scholar] [CrossRef]
- Won, D.; Kim, W.; Shin, D.; Chung, C.C. High-Gain Disturbance Observer-Based Backstepping Control with Output Tracking Error Constraint for Electro-Hydraulic Systems. IEEE Trans. Control. Syst. Technol. 2015, 23, 787–795. [Google Scholar] [CrossRef]
- Athanasatos; Koulocheris, D.; Costopoulos, T.; Raptis, K. Operational fault diagnosis in industrial hydraulic systems through modeling the internal leakage of its components. Am. J. Appl. Sci. 2013, 10, 1648–1659. [Google Scholar] [CrossRef] [Green Version]
- Werlefors, M.; Medvedev, A. Observer-based leakage detection in hydraulic systems with position and velocity feedback. In Proceedings of the 17th IEEE International Conference on Control Applications, San Antonio, TX, USA, 3–5 September 2008; pp. 948–953. [Google Scholar]
- Liu, M.; Cao, X.; Shi, P. Fuzzy-Model-Based Fault-Tolerant Design for Nonlinear Stochastic Systems Against Simultaneous Sensor and Actuator Faults. IEEE Trans. Fuzzy Syst. 2013, 21, 789–799. [Google Scholar] [CrossRef]
- Xia, J.; Jiang, B.; Zhang, K. Robust Asymptotic Estimation of Sensor Faults for Continuous-time Interconnected Systems. Int. J. Control. Autom. Syst. 2019, 17, 3170–3178. [Google Scholar] [CrossRef]
- Luo, C.; Yao, J.; Gu, J. Extended-state-observer-based output feedback adaptive control of hydraulic system with continuous friction compensation. J. Frankl. Inst. 2019, 356, 8414–8437. [Google Scholar] [CrossRef]
- Gao, Z.; Cecati, C.; Ding, S.X. A Survey of Fault Diagnosis and Fault-Tolerant Techniques—Part I: Fault Diagnosis with Model-Based and Signal-Based Approaches. IEEE Trans. Ind. Electron. 2015, 62, 3757–3767. [Google Scholar] [CrossRef] [Green Version]
- Gao, Z.; Cecati, C.; Ding, S.X. A Survey of Fault Diagnosis and Fault-Tolerant Techniques Part II: Fault Diagnosis with Knowledge-Based and Hybrid/Active Approaches. IEEE Trans. Ind. Electron. 2015, 62, 1. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Syrmos, V.L. Fault detection, identification and estimation in the electro-hydraulic actuator system using EKF-based multiple-model estimation. In Proceedings of the 2008 16th Mediterranean Conference on Control and Automation; Institute of Electrical and Electronics Engineers (IEEE), Ajaccio, Corsica, France, 25–27 June 2008; pp. 1693–1698. [Google Scholar]
- Mahulkar, V.; Adams, D.E.; Derriso, M. Derivative free filtering in hydraulic systems for fault identification. Control. Eng. Pr. 2011, 19, 649–657. [Google Scholar] [CrossRef]
- Hua, X.; Darong, H.; Guo, S. Extended State Observer Based on ADRC of Linear System with Incipient Fault. Int. J. Control. Autom. Syst. 2019, 18, 1425–1434. [Google Scholar] [CrossRef]
- Tian, L.; Qian, L.; Li, M.; Fu, J.W. Faults Detection Using Sliding Mode Observer and Its Application on Elevating Servo Systems. J. Control. Sci. Eng. 2019, 2019, 1–13. [Google Scholar] [CrossRef]
- Yacun, G.; Lifan, L.; Lina, Y. Fault Diagnosis and Statistical Information Tracking Fault Tolerant Control for Non-Gaussian Non-linear Stochastic Systems. Int. J. Control. Autom. Syst. 2018, 16, 2303–2311. [Google Scholar] [CrossRef]
- Bahrami, M.; Naraghi, M.; Zareinejad, M. Adaptive super-twisting observer for fault reconstruction in electro-hydraulic systems. ISA Trans. 2018, 76, 235–245. [Google Scholar] [CrossRef] [Green Version]
- Haoshuang, C.; Dongsheng, D.; Dewen, Z.; Yan, Y. UIO-based Fault Estimation and Accommodation for Nonlinear Switched Systems. Int. J. Control. Autom. Syst. 2019, 17, 435–444. [Google Scholar] [CrossRef]
- Xu, Q.-N.; Lee, K.-M.; Zhou, H.; Yang, H.-Y. Model-Based Fault Detection and Isolation Scheme for a Rudder Servo System. IEEE Trans. Ind. Electron. 2015, 62, 2384–2396. [Google Scholar] [CrossRef]
- Chen, F.; Lu, D.; Li, X. Robust Observer Based Fault-tolerant Control for One-sided Lipschitz Markovian Jump Systems with General Uncertain Transition Rates. Int. J. Control. Autom. Syst. 2019, 17, 1614–1625. [Google Scholar] [CrossRef]
- Sim, H.Y.; Ramli, R.; Saifizul, A.; Soong, M.F. Detection and estimation of valve leakage losses in reciprocating compressor using acoustic emission technique. Measurment 2020, 152, 107315. [Google Scholar] [CrossRef]
- Jiang, J.; Yu, X. Fault-tolerant control systems: A comparative study between active and passive approaches. Annu. Rev. Control. 2012, 36, 60–72. [Google Scholar] [CrossRef]
- Blanke, M.; Kinnaert, M.; Lunze, J.; Staroswiecki, M. Diagnosis and Fault-Tolerant Control; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Chen, G.; Song, Y.-D. Robust fault-tolerant cooperative control of multi-agent systems: A constructive design method. J. Frankl. Inst. 2015, 352, 4045–4066. [Google Scholar] [CrossRef]
- Choux, M. Nonlinear, Adaptive and Fault-tolerant Control for Electro-hydraulic Servo Systems. Ph.D. Thesis, Technical University of Denmark, Lyngby, Denmark, 2011. [Google Scholar]
- Leuschen, M.L.; Walker, I.D.; Cavallaro, J.R. Nonlinear Fault Detection for Hydraulic Systems. In Fault Diagnosis and Fault Tolerance for Mechatronic Systems; Springer: Berlin/Heidelberg, Germany, 2007; Volume 1, pp. 169–191. [Google Scholar]
- Li, T.; Yang, T.; Cao, Y.; Xie, R.; Wang, X. Disturbance-Estimation Based Adaptive Backstepping Fault-Tolerant Synchronization Control for a Dual Redundant Hydraulic Actuation System With Internal Leakage Faults. IEEE Access 2019, 7, 73106–73119. [Google Scholar] [CrossRef]
- Guo, Q.; Zhang, Y.; Celler, B.; Su, S. Backstepping Control of Electro-Hydraulic System Based on Extended-State-Observer with Plant Dynamics Largely Unknown. IEEE Trans. Ind. Electron. 2016, 63, 6909–6920. [Google Scholar] [CrossRef]
- Yao, J.; Deng, W. Active Disturbance Rejection Adaptive Control of Hydraulic Servo Systems. IEEE Trans. Ind. Electron. 2017, 64, 8023–8032. [Google Scholar] [CrossRef]
- Wang, C.; Zhang, Z.; Wang, H.; Zhao, B.; Quan, L. Disturbance observer-based output feedback control of hydraulic servo system considering mismatched uncertainties and internal pressure dynamics stability. IET Control. Theory Appl. 2020, 14, 1046–1056. [Google Scholar] [CrossRef]
- Tran, D.T.; Jin, M.; Ahn, K.K. Nonlinear Extended State Observer Based on Output Feedback Control for a Manipulator with Time-Varying Output Constraints and External Disturbance. IEEE Access 2019, 7, 156860–156870. [Google Scholar] [CrossRef]
- Jun, G.H.; Ahn, K.K. Extended-State-Observer-Based Nonlinear Servo Control of An Electro-Hydrostatic Actuator. J. Drive Control 2017, 14, 61–70. [Google Scholar]
- Tran, D.T.; Dao, H.V.; Dinh, T.Q.; Ahn, K.K. Output Feedback Control via Linear Extended State Observer for an Uncertain Manipulator with Output Constraints and Input Dead-Zone. Electronics 2020, 9, 1355. [Google Scholar] [CrossRef]
- Truong, D.Q.; Ahn, K.K. Force control for hydraulic load simulator using self-tuning grey predictor - fuzzy PID. Mechatronics 2009, 19, 233–246. [Google Scholar] [CrossRef]
- Truong, D.Q.; Ahn, K.K. Force control for press machines using an online smart tuning fuzzy PID based on a robust extended Kalman filter. Expert Syst. Appl. 2011, 38, 5879–5894. [Google Scholar] [CrossRef]
- Kim, W.; Shin, D.; Won, D.; Chung, C.C. Disturbance-Observer-Based Position Tracking Controller in the Presence of Biased Sinusoidal Disturbance for Electrohydraulic Actuators. IEEE Trans. Control. Syst. Technol. 2013, 21, 2290–2298. [Google Scholar] [CrossRef]
- Sun, C.; Fang, J.; Wei, J.; Hu, B. Nonlinear Motion Control of a Hydraulic Press Based on an Extended Disturbance Observer. IEEE Access 2018, 6, 18502–18510. [Google Scholar] [CrossRef]
- Has, Z.; Rahmat, M.F.; Husain, A.R.; Ahmad, M.N. Robust Precision Control for a Class of Electro-Hydraulic Actuator System based on Disturbance Observer. Int. J. Precis. Eng. Manuf. 2015, 16, 1753–1760. [Google Scholar] [CrossRef]
- Ba, D.X.; Dinh, T.Q.; Bae, J.; Ahn, K.K. An Effective Disturbance-Observer-Based Nonlinear Controller for a Pump-Controlled Hydraulic System. IEEE/ASME Trans. Mechatron. 2019, 25, 32–43. [Google Scholar] [CrossRef]
- Zheng, Q.; Gaol, L.Q.; Gao, Z. On stability analysis of active disturbance rejection control for nonlinear time-varying plants with unknown dynamics. In Proceedings of the 46th IEEE Conference on Decision and Control; Institute of Electrical and Electronics Engineers (IEEE), New Orleans, LA, USA, 12–14 December 2007; pp. 3501–3506. [Google Scholar]
- Ba, D.X.; Ahn, K.K.; Truong, D.Q.; Park, H.G. Integrated model-based backstepping control for an electro-hydraulic system. Int. J. Precis. Eng. Manuf. 2016, 17, 565–577. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
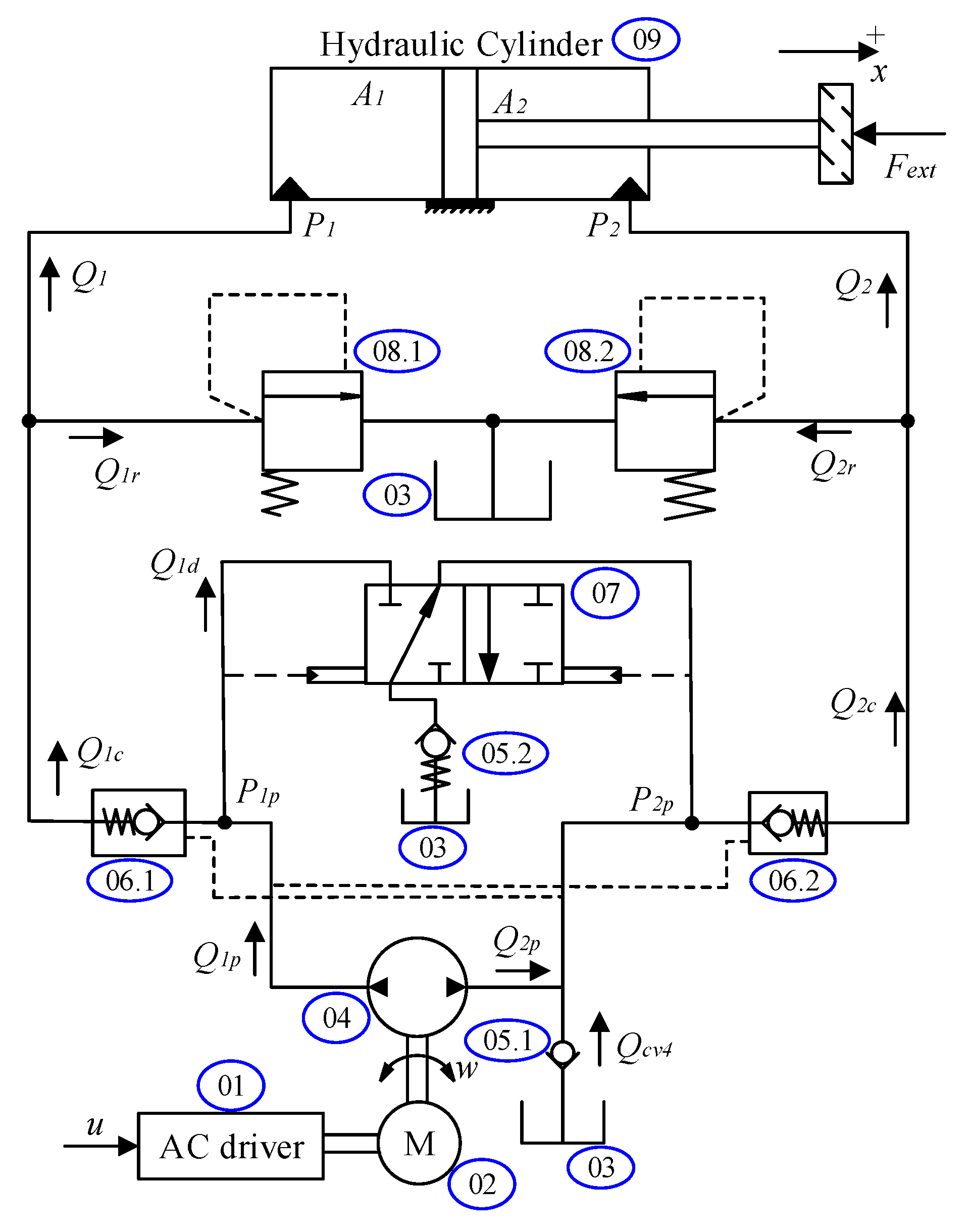
| Symbol | Component | Symbol | Component |
|---|---|---|---|
| 01 | AC driver | 06.1, 06.2 | Pilot check valves |
| 02 | AC motor | 07 | Directional valve |
| 03 | Reservoirs | 08.1, 08.2 | Relief valves |
| 04 | Hydraulic gear pump | 09 | Hydraulic cylinder |
| 05.1, 05.2 | Check valves |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| m | 9.32 kg | m2 | |
| 258 Ns/m | m2 | ||
| 532 N | m3 | ||
| 10π rad/(sV) | m3 | ||
| 15 | Pa | ||
| 10 | m3/rad |
| Controllers | Parameters |
|---|---|
| PID | |
| DBS | |
| Proposed control |
| Symbols | Value | Symbols | Value |
|---|---|---|---|
| 3 | 25 | ||
| 6 | 220,828 | ||
| 0.001 | 98,398 | ||
| 305.5 | 380,844 | ||
| 0.8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Trinh, H.A.; Truong, H.V.A.; Ahn, K.K. Fault Estimation and Fault-Tolerant Control for the Pump-Controlled Electrohydraulic System. Actuators 2020, 9, 132. https://doi.org/10.3390/act9040132
Trinh HA, Truong HVA, Ahn KK. Fault Estimation and Fault-Tolerant Control for the Pump-Controlled Electrohydraulic System. Actuators. 2020; 9(4):132. https://doi.org/10.3390/act9040132
Chicago/Turabian StyleTrinh, Hoai An, Hoai Vu Anh Truong, and Kyoung Kwan Ahn. 2020. "Fault Estimation and Fault-Tolerant Control for the Pump-Controlled Electrohydraulic System" Actuators 9, no. 4: 132. https://doi.org/10.3390/act9040132
APA StyleTrinh, H. A., Truong, H. V. A., & Ahn, K. K. (2020). Fault Estimation and Fault-Tolerant Control for the Pump-Controlled Electrohydraulic System. Actuators, 9(4), 132. https://doi.org/10.3390/act9040132