Recent Advances in Design and Actuation of Continuum Robots for Medical Applications


Abstract
:1. Introduction
1.1. Background
1.2. Outline
2. Continuum Robots Inspiration and Design
2.1. Bio-Inspired Principles
2.2. Structural Design and Characteristics
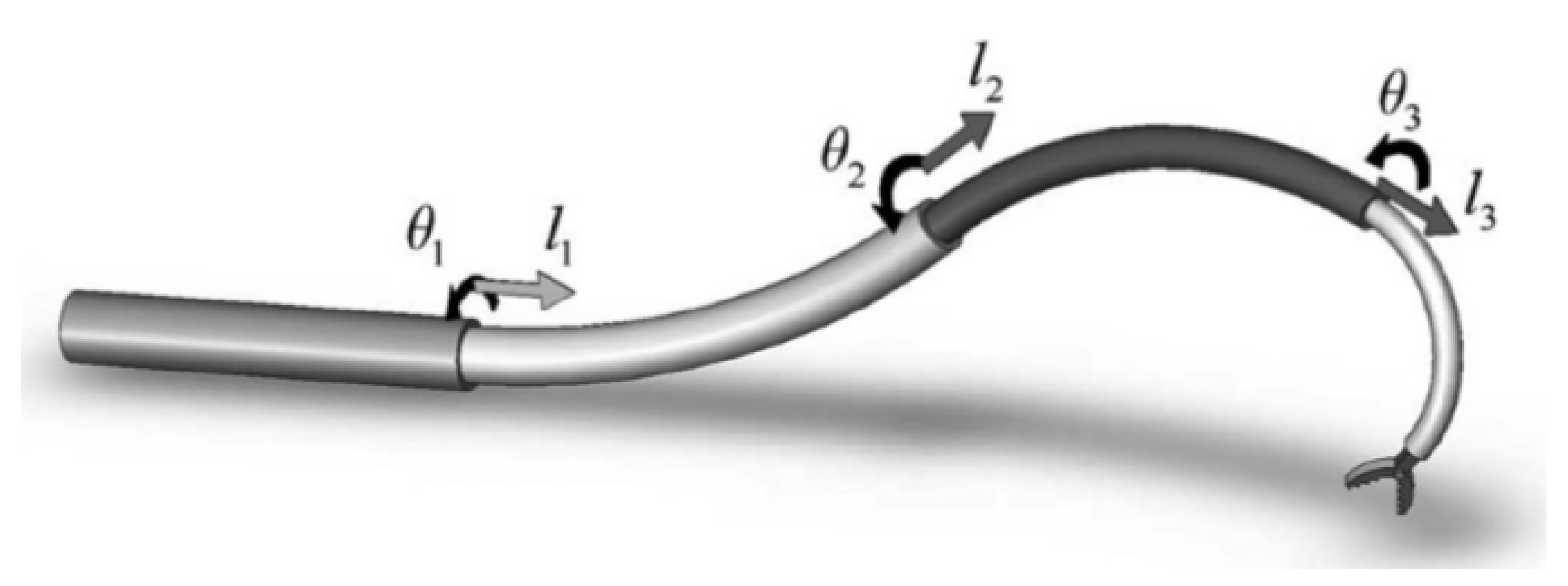
2.2.1. Concentric Tube Continuum Robots
2.2.2. Tendon/Cable Continuum Robots
2.2.3. Origami Continuum Robots
2.2.4. Magnetic Continuum Robots
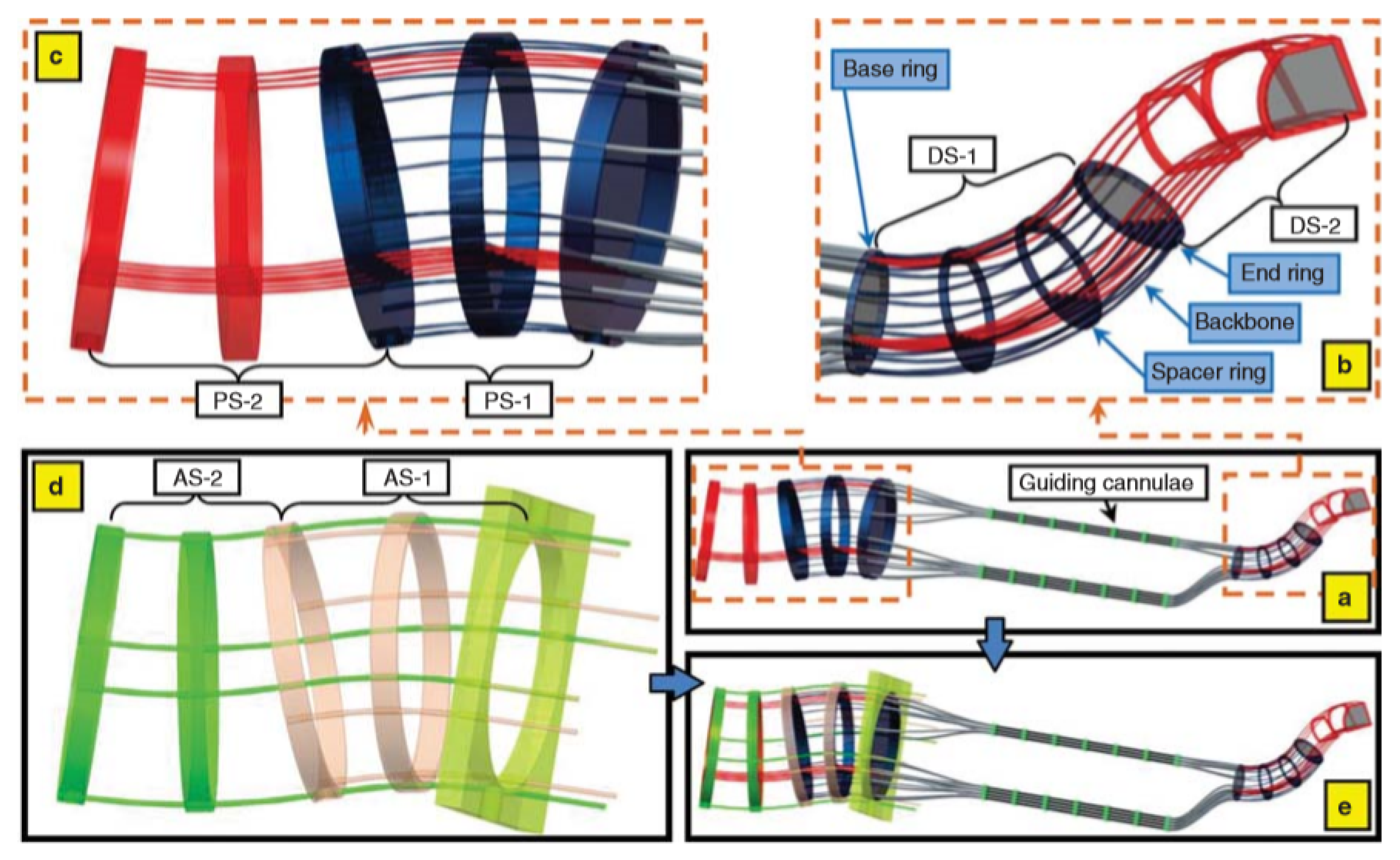
2.2.5. Dual Continuum Mechanism
2.2.6. Comparison of the Structures of Continuum Robots
2.3. Variable Stiffness Methods
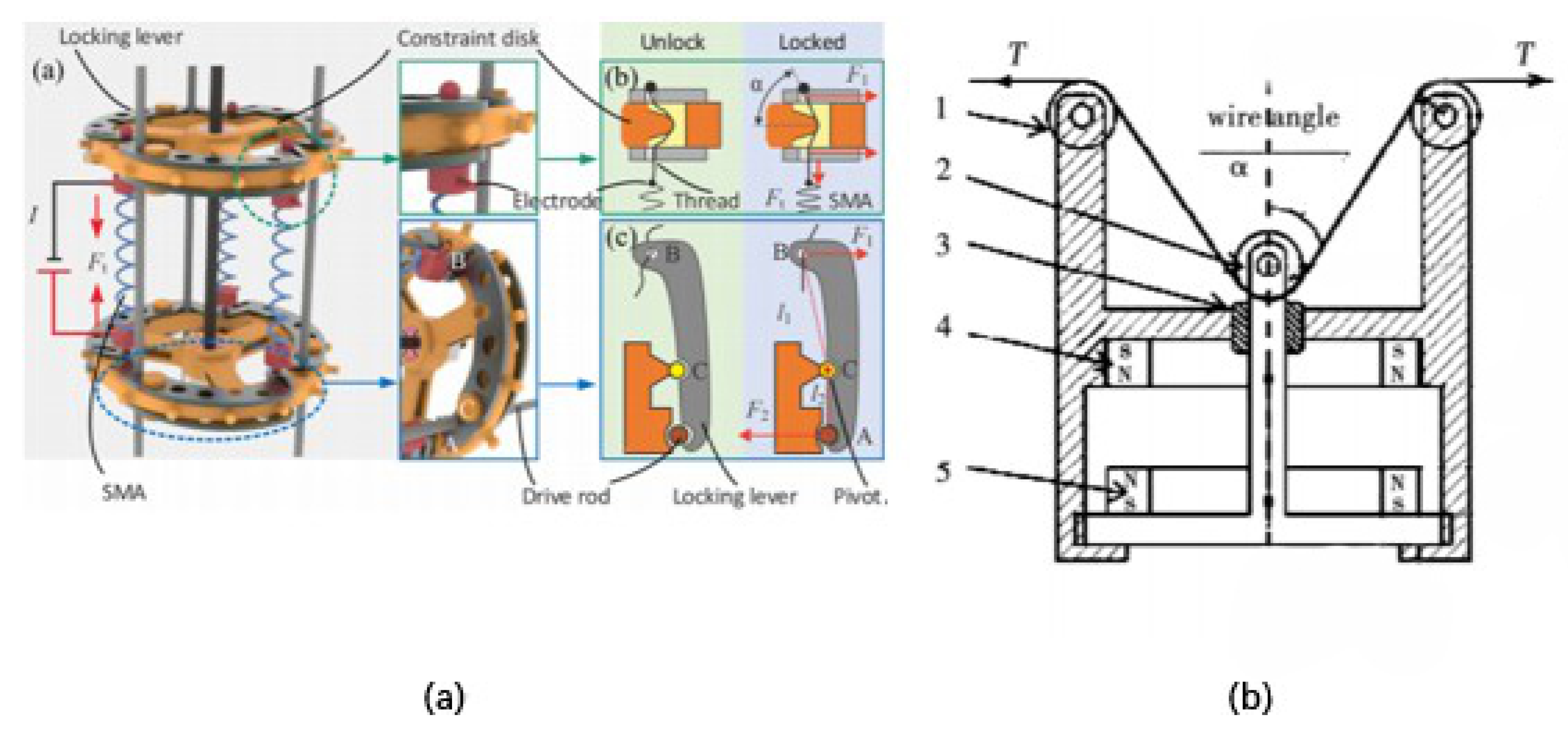
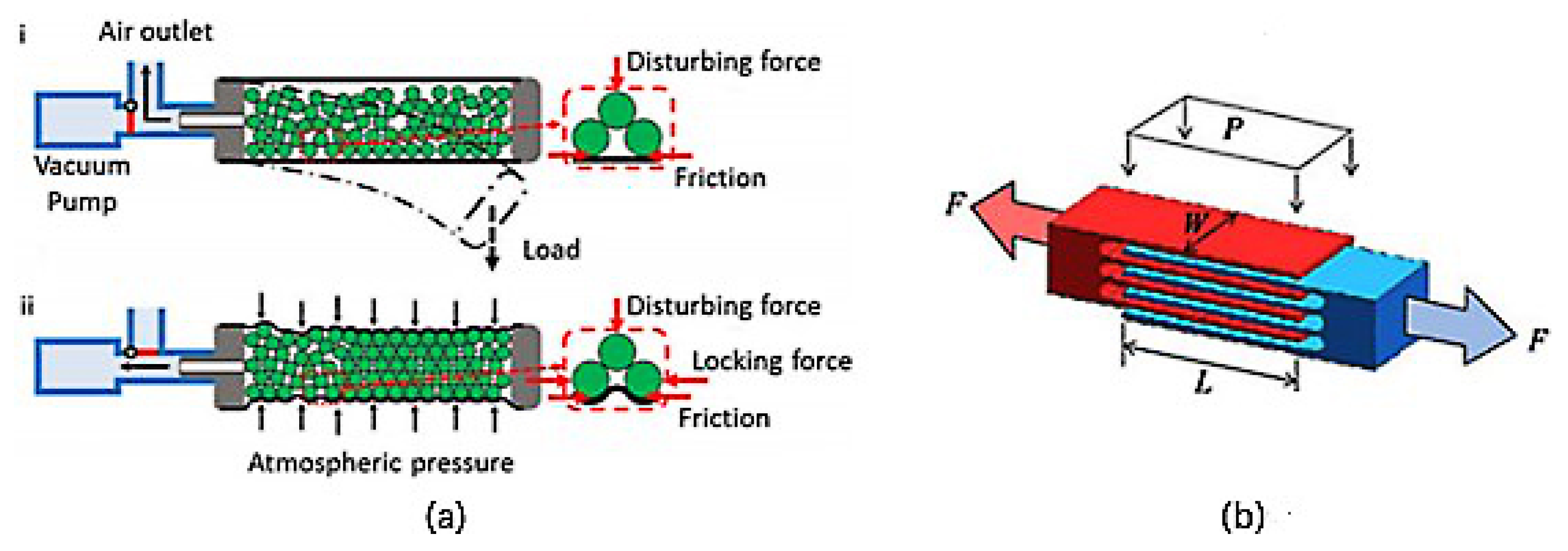
2.3.1. Mechanism-Based Variable Stiffness Methods
2.3.2. Materials-Based Variable Stiffness Methods
Glass/Phase Transition-Based Variable Stiffness Methods
Viscosity-Based Variable Stiffness Methods
Comparison of Materials-Based Variable Stiffness Methods
2.3.3. Acoustic-Based Variable Stiffness Method
2.3.4. Comparison of Variable Stiffness Methods
3. Actuation Methods for Continuum Robot
3.1. Concentric Tube Transmission
3.2. Tendon/Cable Driven
3.3. Pneumatic/Hydraulic
3.4. Smart Materials Driven
3.5. Magnetic Actuation
3.6. Comparison of the Actuation of Continuum Robots
4. Future Research Challenges and Conclusions
4.1. Robot Ethics
4.2. Miniaturization and Modularity
4.3. Variable Stiffness and Self-Adaptive
4.4. Biocompatible Design
4.5. Electric Drive
4.6. Living Cell Actuation
4.7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Siegfarth, M.; Li, Y.; Kong, W.; Tinavi Medical Technologies Co., Ltd. Precision Detection Method and Device for Surgical Robot Positioning System. U.S. Patent Application US20200163725A1, 28 May 2020. [Google Scholar]
- Siegfarth, M.; Pusch, T.P.; Pfeil, A.; Renaud, P.; Stallkamp, J. Multi-material 3D printed hydraulic actuator for medical robots. Rapid Prototyp. J. 2020, 26. [Google Scholar] [CrossRef]
- Zhang, Y.; Lu, M. A review of recent advancements in soft and flexible robots for medical applications. Int. J. Med. Robot. Comput. Assist. Surg. 2020, 16, e2096. [Google Scholar]
- Bottger, S.; Callar, T.; Schweikard, A.; Ruckert, E. Medical robotics simulation framework for application-specific optimal kinematics. Curr. Dir. Biomed. Eng. 2019, 5, 145–148. [Google Scholar]
- Jiangran, Z.; Bo, F.; Min-Hua, Z.; Kai, X. Surgical robots for SPL and NOTES: A review. MITAT Off. J. Soc. Minim. Invasive Ther. 2015, 24, 8–17. [Google Scholar]
- Anderson, V.C.; Horn, R.C. Tensor arm manipulator design. Trans. ASME 1967, DE-57, 1–12. [Google Scholar]
- Robert, J.W. Design and Kinematic Modeling of Constant Curvature Continuum Robots: A Review. Int. J. Robot. Res. 2010, 29, 1661–1683. [Google Scholar]
- Kumar, S.P.; Krishna, C.M. Continuum Arm Robotic Manipulator: A Review. Univers. J. Mech. Eng. 2014, 2, 193–198. [Google Scholar]
- Manti, M.; Cacucciolo, V.; Cianchetti, M. Stiffening in Soft Robotics: A Review of the State of the Art. IEEE Robot. Autom. Mag. 2016, 23, 93–106. [Google Scholar]
- Yang, Y.; Li, Y.; Chen, Y. Principles and methods for stiffness modulation in soft robot design and development. Bio-Des. Manuf. 2018, 1, 14–25. [Google Scholar]
- Hannan, M.W.; Walker, I.D. Kinematics and the implementation of an elephant’s trunk manipulator and other continuum style robots. J. Robot. Syst. 2003, 20, 45–63. [Google Scholar]
- Smith, K.K.; Runks, W.M. Tongues, and tentacles-moving with skeletons of muscle. Am. Sci. 1989, 77, 28–35. [Google Scholar]
- Qiang, Z.; Yongheng, Y. Research status and prospects of bionic continuum robots. Mach. Des. 2009, 26, 1–6. [Google Scholar]
- Margheri, L.; Laschi, C.; Mazzolai, B. Soft robotic arm inspired by the octopus: I. From biological functions to artificial requirements. Bioinspir. Biomimetics 2012, 7, 025004. [Google Scholar]
- Mazzolai, B.; Margheri, L.; Dario, P.; Laschi, C. Measurements of octopus arm elongation: Evidence of differences by body size and gender. J. Exp. Mar. Biol. Ecol. 2013, 447, 160–164. [Google Scholar]
- Mazzolai, B.; Margheri, L.; Cianchetti, M.; Dario, P.; Laschi, C. Soft-robotic arm inspired by the octopus: II. From631 artificial requirements to innovative technological solutions. Bioinspir. Biomimetics 2012, 7, 025005. [Google Scholar]
- Jihong, Y.; Peipei, S.; Xinbin, Z.; Jie, Z. Summary of research and development on bionic mechanism, drive and modeling control of soft manipulator. Chin. J. Mech. Eng. 2018, 54, 1–14. [Google Scholar]
- Cianvchetti, M.; Arienti, A.; Follador, M.; Mazzolai, B.; Dario, P.; Laschi, C. Design concept and validation of a robotic arm inspired by the octopus. Mater. Sci. Eng. C 2011, 31, 1230–1239. [Google Scholar]
- Robinson, G.; Davies, J.B.C. Continuum robots-a state of the artC. In Proceedings of the IEEE International Conference on Robotics and Automation Michigan, Detroit, MI, USA, 10–15 May 1999. [Google Scholar]
- Burgner-Kahrs, J.; Rucker, D.C. Continuum Robots for Medical Applications: A Survey. IEEE Trans. Robot. 2015, 31, 1261–1280. [Google Scholar]
- Lining, S.; Haiyan, H.; Mantian, L. Summary of continuous robot research. Robot 2010, 32, 688–694. [Google Scholar]
- Kolachalama, S.; Lakshmanan, S.; Wang, W. Continuum Robots for Manipulation Applications: A Survey. J. Robot. 2020, 2020, 4187048. [Google Scholar]
- Jones, B.A.; McMahan, W.; Walker, I. Design and analysis of a novel pneumatic manipulator. IFAC Proc. Vol. 2004, 37, 687–692. [Google Scholar] [CrossRef]
- Laschi, C.; Cianchetti, M.; Mazzolai, B.; Margheri, L.; Follador, M.; Dario, P. Soft robot arm inspired by the Octopus. Adv. Robot. 2012, 26, 709–727. [Google Scholar] [CrossRef]
- Xu, S.; Li, G.; Song, D.; Sun, L.; Liu, J. Real-time shape recognition of a deformable link by using a self-organizing map. In Proceedings of the IEEE 14th International Conference on Automation Science and Engineering (CASE), Munich, Germany, 20–24 August 2018; pp. 586–591. [Google Scholar]
- Shikari, A.; Asada, H. Triple scissor extender robot arm: A solution to the last one foot problem of manipulation. IEEE Robot. Autom. Lett. 2018, 3, 3975–3982. [Google Scholar] [CrossRef]
- Niu, G.; Wang, J.; Xu, K. Model analysis for a continuum aircraft fuel tank inspection robot based on the Rzeppa universaljoint. Adv. Mech. Eng. 2018, 10, 5. [Google Scholar] [CrossRef]
- Zheng, Z.; Wang, K.; Wu, X.; Zhang, Q.; Li, K. Dynamic analysis of elastic projecting robot inspired by chameleon tongue. In Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO), Zurich, Switzerland, 12–15 December 2018; pp. 2088–2094. [Google Scholar]
- Neumann, M.; Burgner-Kahrs, J. Considerations for follow-the-leader motion of extensible tendon-driven continuum robots. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 917–923. [Google Scholar]
- Georgilas, I.P.; Tourassis, V.D. Ermis-a novel biologically inspired flexible robotic mechanism for industrial applications. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Singapore, 14–17 July 2009; pp. 1504–1509. [Google Scholar]
- Boccolato, G.; Manta, F.; Dumitru, S.; Cojocaru, D. 3D control for a tentacle robot. In Proceedings of the 3rd International Conference on Applied Mathematics, Simulation, Modelling (ASM’09), Stevens Point, WI, USA, 16 December 2009; pp. 29–31. [Google Scholar]
- Cheng, C.; Cheng, J.; Huang, W. Design and development of a novel SMA actuated multi-DOF soft robot. IEEE Access 2019, 7, 75073–75080. [Google Scholar] [CrossRef]
- Li, Z.; Du, R. Design and implementation of a biomimetic wire-driven underactuated serpentine manipulator. Trans. Control Mech. Syst. 2012, 1, 250–258. [Google Scholar]
- Edei, M.; Knoll, M.K.A.; Riesner, S. Continuum worm-like robotic mechanism with decentral control architecture. In Proceedings of the 2014 IEEE International Conference on Automation Science and Engineering (CASE), Taipei, Taiwan, 18–22 August 2014; pp. 866–871. [Google Scholar]
- Giorelli, M.; Renda, F.; Calisti, M.; Arienti, A.; Ferri, G.; Laschi, C. Neural network and jacobian method for solving the inverse statics of a cable-driven soft arm with nonconstant curvature. IEEE Trans. Robot. 2015, 31, 823–834. [Google Scholar] [CrossRef]
- Sanan, S.; Moidel, J.; Atkeson, C.G. A continuum approach to safe robots for physical human interaction. In Proceedings of the International Symposium on Quality of Life Technology (isQoLT), Toronto, ON, Canada, 27–29 June 2011. [Google Scholar]
- Marchese, A.D.; Katzschmann, R.K.; Rus, D. Whole arm planning for a soft and highly compliant 2d robotic manipulator. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 554–560. [Google Scholar]
- Dupont, P.E.; Member, S.; Lock, J.; Itkowitz, B.; Butler, E.; Member, S. Design and Control of Concentric-Tube Robots. IEEE Trans. Robot. 2010, 26, 209–225. [Google Scholar] [CrossRef] [Green Version]
- Yang, X.; Song, S.; Liu, L.; Yan, T.; Meng, M. Design and Optimization of Concentric Tube Robots Based on Surgical Tasks, Anatomical Constraints and Follow-the-Leader Deployment. IEEE Access 2019, 7, 173612–173625. [Google Scholar] [CrossRef]
- Zhou, Y.Y.; Li, J.H.; Guo, M.Q.; Wang, Z.D.; Liu, H. Modeling and Optimization Analysis of a Continuum Robot for Single-Port Surgery. Robot 2020, 42, 316–324. [Google Scholar]
- Anzhu, L.R.; Ning, G.; Yang, S.G.; Ros-freixedes, L. Design optimization of a contact-aided continuum robot for endobronchial interventions based on anatomical constraints. Int. J. Comput. Assist. Radiol. Surg. 2019, 14, 1137–1146. [Google Scholar]
- Zhao, L.; Zhao, Z.Y.; Zhu, D.Y.; Liu, C.; Li, Y. Design and simulation of line-driven continuum surgical robot for minimally invasive surgery. J. Mech. Electr. Eng. 2020, 37, 451–455. [Google Scholar]
- Gao, Y.; Takagi, K.; Kato, T.; Shono, N.; Hata, N. Continuum Robot with Follow-the-Leader Motion for Endoscopic Third Ventriculostomy and Tumor Biopsy. IEEE Trans. Biomed. Eng. 2020, 67, 379–390. [Google Scholar] [CrossRef]
- Wang, H.; Wang, X.; Yang, W.; Du, Z. Design and Kinematic Modeling of a Notch Continuum Manipulator for Laryngeal Surgery. Int. J. Control. Autom. Syst. 2020, 18, 1–8. [Google Scholar] [CrossRef]
- Camarillo, D.B.; Milne, C.F.; Carlson, C.R.; Zinn, M.R.; Salisbury, J.K. Mechanics modeling of tendon-driven continuum manipulators. IEEE Trans. Robot. 2008, 24, 1262–1273. [Google Scholar] [CrossRef]
- Junius, S.; Onal, C.D. An Origami Continuum Robot Capable of Precise Motion Through872 Torsionally Stiff Body and Smooth Inverse Kinematics. Soft Robot. 2020. [Google Scholar] [CrossRef]
- Lloyd, P.; Hoshiar, A.K.; Veiga, T.; Attanasio, A.; Marahrens, N. A learnt approach for the design of magnetically actuated shape forming soft tentacle robots. IEEE Robot. Autom. Lett. 2020, 5, 3937–3944. [Google Scholar] [CrossRef] [Green Version]
- Kim, Y.; Parada, G.A.; Liu, S.; Zhao, X. Ferromagnetic soft continuum robots. Sci. Robot. 2019, 4, eaax7329. [Google Scholar] [CrossRef]
- Sitti, M.; Wiersma, D.S. Pros and Cons: Magnetic versus Optical Microrobots. Adv. Mater. 2020, 32, 1906766. [Google Scholar] [CrossRef]
- Xu, K.; Zhao, J.R.; Fu, M.X. Development of the SJTU Unfoldable Robotic System (SURS) for Single Port Laparoscopy. IEEE ASME Trans. Mechatron. 2014, in press. [Google Scholar] [CrossRef]
- Xu, K.; Fu, M.X.; Zhao, J.R. Design of the SJTU unfoldable robotic system(SURS) for single port laparoscopy. In Proceedings of the 2014 IEEE International Conference on Robotics and Biomimetics, Bali, Indonesia, 5–10 December 2014. [Google Scholar]
- Zhao, J.R.; Zheng, X.D.; Zheng, M.H.; Shih, A.J.; Xu, K. An continuum robot testbed for determination of enabling characteristics for endoscopic procedures. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Wollongong, Austeralia, 9–12 July 2013. [Google Scholar]
- Yang, C.; Geng, S.; Walker, I.; Branson, D.T.; Liu, J.; Dai, J.S.; Kang, R. Geometric constraint-based modeling and analysis of a novel continuum robot with Shape Memory Alloy initiated variable stiffness. Int. J. Robot. Res. 2020. [Google Scholar] [CrossRef]
- Kim, Y.J.; Cheng, S.B.; Kim, S.; Iagnemma, K. A stiffness-adjustable hyperredundant manipulator using a variable neutral-line mechanism for minimally invasive surgery. IEEE Trans. Robot. 2014, 30, 382–395. [Google Scholar] [CrossRef] [Green Version]
- Stilli, A.; Wurdemann, H.A.; Althoefer, K. Shrinkable, stiffness-controllable soft manipulator based on a bio-inspired antagonistic actuation principle. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Chicago, IL, USA, 14–18 September 2014; pp. 2476–2481. [Google Scholar]
- Yagi, A.; Masamune, K.; Masamune, K.; Liao, H.; Dohi, T. Rigid-flexible outer sheath model using slider linkage locking mechanism and air pressure for endoscopic surgery. In Proceedings of the 2006 International Conference on Medical Image Computing and Computer-Assisted Intervention, Copenhagen, Denmark, 1–6 October 2006; Springer: Berlin, Germany, 2006; pp. 503–510. [Google Scholar]
- Sun, C.; Chen, L.; Liu, J.; Dai, J.S.; Kang, R. A hybrid continuum robot based on pneumatic muscles with embedded elastic rods. Proc. Inst. Mech. Eng. Part J. Mech. Eng. Sci. 2020, 234, 318–328. [Google Scholar] [CrossRef]
- Degani, A.; Choset, H.; Wolf, A.; Zenati, M. Highly articulated robotic probe for minimally invasive surgery. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation (ICRA), Orlando, FL, USA, 15–19 May 2006; pp. 4167–4172. [Google Scholar]
- Chen, Y.; Chang, J.H.; Greenlee, A.S.; Cheung, K.C.; Slocum, A.H.; Gupta, R. Multi-turn, tension stiffening catheter navigation system. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation (ICRA), Anchorage, AK, USA, 3–7 May 2010; pp. 5570–5575. [Google Scholar]
- Zhang, M.; Fang, L.J.; Sun, F.; Sun, X.W. Design and decoupling control of variable-stiffness flexible robot joint. Dianji Kongzhi Xuebao/Electric Mach. Control. 2019, 23, 120–128. [Google Scholar]
- Li, C.; Gu, X.; Xiao, X.; Lim, C.M.; Ren, H. Flexible Robot With Variable Stiffness in Transoral Surgery. IEEE/ASME Trans. Mechatronics 2020, 25, 1–10. [Google Scholar] [CrossRef]
- Wei, Y. Investigations of Variable Stiffness Principles for Compliant Robotics. Ph.D. Thesis, The University of Hong Kong, HongKong, China, 2016. [Google Scholar]
- Cheng, N.G.; Lobovsky, M.B.; Keating, S.J.; Setapen, A.M.; Gero, K.I.; Hosoi, A.E.; Iagnemma, K.D. Design and analysis of a robust, low-cot, highly articulated manipulator enabled by jamming of granular media. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation (ICRA), Saint Paul, MN, USA, 14–18 May 2012; pp. 4328–4333. [Google Scholar]
- Ranzani, T.; Gerboni, G.; Cianchetti, M.; Menciassi, A. A bioinspired soft manipulator for minimally invasive surgery. Bioinspir. Biomimetics 2015, 10, 035008. [Google Scholar] [CrossRef]
- Ranzani, T.; Cianchetti, M.; Gerboni, G.; Falco, I.D.; Menciassi, A. A soft modular manipulator for minimally invasive surgery: Design and characterization of a single module. IEEE Trans. Robot. 2016, 32, 187–200. [Google Scholar] [CrossRef]
- De, F.I.; Cianchetti, M.; Menciassi, A. A soft multi-module manipulator with variable stiffness for minimally invasive surgery. Bioinspir. Biomimetics 2017, 12, 056008. [Google Scholar]
- Arezzo, A.; Mintz, Y.; Allaix, M.E.; Arolfo, S.; Bonino, M.; Gerboni, G.; Brancadoro, M.; Cianchetti, M.; Menciassi, A.; Wurdemann, H.; et al. Total mesorectal excision using a soft and flexible robotic arm: A feasibility study in cadaver models. Surg. Endosc. 2017, 31, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Kim, Y.J.; Cheng, S.B.; Kim, S.; Lagnemma, K. A novel layer jamming mechanism with tunable stiffness capability for752 minimally invasive surgery. IEEE Trans. Robot. 2013, 29, 1031–1042. [Google Scholar] [CrossRef]
- Moses, M.S.; Kutzer, M.D.M.; Ma, H.; Armand, M. A continuum manipulator made of interlocking fibers. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 4008–4015. [Google Scholar]
- Santiago, J.L.C.; Godage, I.S.; Gonthina, P.; Walker, I.D. Soft robots and kangaroo tails: Modulating compliance in continuum structures through mechanical layer jamming. Soft Robot. 2016, 3, 54–63. [Google Scholar] [CrossRef]
- Yu, X.X.; Zhang, F.; Chen, L.K.; Wu, K.Y.; Jiang, J.P. Review of Controllable Stiffness Techniques for Minimally Invasive Surgical Manipulator. J. Chongqing Technol. Bus. Univ. 2020, 037, 29–33. [Google Scholar]
- Taniguchi, H.; Miyake, M.; Suzumori, K. Development of New Soft Actuator Using Magnetic Intelligent Fluids for Flexible Walking Robot. In Proceedings of the International Conference on Control Automation and Systems, Gyeonggi-do, Korea, 27–30 October 2010. [Google Scholar]
- Park, G.; Bement, M.T.; Harthan, D.A.; Smith, R.E.; Farrara, C.R. The Use of Active Materials for Machining Processes: A Review. Int. J. Mach. Tools Manuf. 2007, 47, 2189–2206. [Google Scholar] [CrossRef]
- Yalcintas, M.; Dai, H. Magnetorheological and Electrorheological Materials in Adaptive Structures and Their Performance Comparison. Smart Mater. Struct. 1999, 8, 560–573. [Google Scholar] [CrossRef]
- Zhao, R.; Yao, Y.; Luo, Y. Development of a Variable Stiffness Over Tube Based on Low-Melting-Point-Alloy for Endoscopic Surgery. J. Med. Devices 2016, 10, 303–310. [Google Scholar] [CrossRef]
- Nakai, H.; Kuniyoshi, Y.; Inaba, M.; lnoue, H. Metamorphic robot made of low melting point alloy. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Lausanne, Switzerland, 30 September–4 October 2002. [Google Scholar]
- Firouzeh, A.; Mirrazavi, S.S.S.; Billard, A.; Paik, J. An under actuated robotic arm with adjustable stiffness shape memory polymer joints. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 2536–2543. [Google Scholar]
- Chen, Y.; Sun, J.; Liu, Y.; Leng, J. Variable stiffness property study on shape memory polymer composite tube. Smart Mater. Struct. 2012, 21, 94021–94029. [Google Scholar] [CrossRef]
- Henke, M.; Sorber, J.; Gerlach, G. Multi-layer beam with variable stiffness based on electroactive polymers. Proc. SPIE Int. Soc. Opt. Eng. 2012, 8340, 83401P. [Google Scholar]
- Yuen, C.S.; Bilodeau, R.A.; Kramer, R. Active Variable Stiffness Fibers for Multifunctional Robotic Fabrics. IEEE Robot. Autom. Lett. 2016, 1, 708–715. [Google Scholar] [CrossRef]
- Dong, H.; Walker, G.M. Adjustable stiffness tubes via thermal modulation of a low melting point polymer. Smart Mater. Struct. 2012, 21, 317–321. [Google Scholar] [CrossRef]
- Lendlein, A.; Kelch, S. Shape-memory polymers. Angew. Chem. Int. Ed. 2002, 41, 2034–2057. [Google Scholar] [CrossRef]
- Telleria, M.J.; Hansen, M.; Campbell, D.; Servi, A.; Culpepper, M.L. Modeling and Implementation of Solder-activated Joints for Single-Actuator, Centimeterscale Robotic Mechanisms. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010. [Google Scholar]
- Chen, H.; Hansen, M.; Playter, R.; Cheng, N.; Ishigami, G.; Hawthorne, S.; Hansen, M.; Telleria, M.; Iagnemma, K. Design and analysis of a soft mobile robot composed of multiple thermally activated joints driven by a single actuator. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010. [Google Scholar]
- Jianchen, W. Research on System Design Method and Master-Slave Control Strategy of Variable Stiffness Single Hole Surgical Robot; Tianjin University: Tianjin, China, 2017. [Google Scholar]
- Sadeghi, A.; Beccai, L.; Mazzolai, B. Innovative soft robots based on electrorheological fluids. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Algarve, Portugal, 7–12 October 2012; pp. 4237–4242. [Google Scholar]
- Bell, R.C.; Karli, J.O.; Vavreck, A.N.; Zimmerman, D.T.; Ngatu, G.T.; Wereley, N.M. Magnetorheology of submicron diameter iron microwires dispersed in silicone oil. Smart Mater. Struct. 2008, 17, 01502. [Google Scholar] [CrossRef]
- George, D.; Francois, C.; Marcel, T.A.; tos, B.C.; Efthymios, M.; Vijay, P.; Emanuel, V.P.; Jan, D.; Sebastien, O.; Paolo, D.C.; et al. A Continuum Robot and Control Interface for Surgical Assist in Fetoscopic Interventions. IEEE Robot. Autom. Lett. 2017, 2, 1656–1663. [Google Scholar]
- Alfalahi, H.; Renda, F.; Stefanini, C. Concentric Tube Robots for Minimally InvasiveSurgery: Current Applications andFuture Opportunities. IEEE Trans. Med. Robot. Bionics 2020, 2, 410–424. [Google Scholar] [CrossRef]
- Morimoto, T.K.; Hawkes, E.W.; Okamura, A.M. Design of a Compact Actuation and Control System for Flexible Medical Robots. IEEE Robot. Autom. Lett. 2017, 2, 1579–1585. [Google Scholar] [CrossRef]
- Mahvash, M.; Dupont, P.E. Stiffness control of a continuum manipulator in contact with a soft environment. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 863–870. [Google Scholar]
- Morimoto, T.K.; Okamura, A.M. Design of 3-D Printed Concentric Tube Robots. IEEE Trans. Robot. 2016, 32, 1419–1430. [Google Scholar] [CrossRef]
- Xiaohua, H.; Ang, C.; Yigang, L.; Chris, Z.; Edwin, Z. Steerable catheters for minimally invasive surgery: A review and future directions. Comput. Assist. Surg. 2018, 23, 21–41. [Google Scholar]
- Morimoto, T.K.; Greer, J.D.; Hawkes, E.W.; Hsieh, M.H.; Okamura, A.M. Toward the Design of Personalized Continuum Surgical Robots. Ann. Biomed. Eng. 2018, 46, 1522–1533. [Google Scholar] [CrossRef]
- Umai, F.M.; Young, X.B.K.S. A concentric tube-based 4-DOF puncturing needle with a novel miniaturized actuation system for vitrectomy. Biomed. Eng. Online 2019, 18, 1–16. [Google Scholar]
- Li, M.; Kang, R.; Geng, S.; Guglielmino, E. Design and control of a tendon-driven continuum robot. Trans. Inst. Meas. Control. 2018, 40, 3263–3272. [Google Scholar] [CrossRef]
- Yu, M.; Yang, W.; Yu, Y.; Cheng, X.; Jiao, Z. A Crawling Soft Robot Driven by Pneumatic Foldable Actuators Based on Miura-Ori. Actuators 2020, 9, 26. [Google Scholar] [CrossRef] [Green Version]
- Xiang, C.; Giannaccini, M.E.; Atyabi, A.; Theodoridis, T.; Nefti-meziani, S.; Davis, S. Novel Design of a Soft Lightweight Pneumatic Continuum Robot Arm with Decoupled. Soft Robot. 2018, 5, 54–70. [Google Scholar]
- Robertson, M.A.; Kara, O.C.; Paik, J. Soft pneumatic actuator- driven origami-inspired modular robotic “pneumagami. Int. J. Robot. Res. 2020. [Google Scholar] [CrossRef]
- Greer, J.D.; Morimoto, T.K.; Okamura, A.M.; Hawkes, E.W. A Soft, Steerable Continuum Robot That Grows via Tip Extension. Soft Robot. 2019, 6, 95–108. [Google Scholar] [CrossRef] [PubMed]
- Takane, E.; Tadakuma, K.; Yamamoto, T.; Konyo, M.; Tadokoro, S. A mechanical approach to realize reflexive omnidirectional bending motion for pneumatic continuum robots. Robomech J. 2016, 3, 28. [Google Scholar] [CrossRef] [Green Version]
- Alcaide, J.O.; Pearson, L.; Rentschler, M.E. Design, modeling and control of a SMA-actuated biomimetic robot with novel functional skin. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017. [Google Scholar]
- Yu, J.; Li, X.; Pang, L.; Wu, Z. Design and attitude control of a novel robotic jell fish capable of 3D motion. Sci. China 2019, 62, 182–184. [Google Scholar]
- Robotics. Investigators at Chinese University of Hong Kong Detail Findings in Robotics (Design, Modeling, and Control of a Compact SMA-Actuated MR-Conditional Steerable Neurosurgical Robot). J. Robot. Mach. Learn. 2020, 5, 1381–1388. [Google Scholar]
- Luo, B.; Li, B.; Yu, Y.; Meng, Y.; Ma, J.; Yang, W.; Wang, P.; Zhiwei, J. A Jumping Robot Driven by a Dielectric Elastomer Actuator. Appl. Sci. 2020, 10, 2241. [Google Scholar] [CrossRef] [Green Version]
- Shi, J.X.; Sun, K.; Lv, Y.H.; Li, R.; Deng, J.; Wang, C.; Pan, K. Programmable graphene-based humidity and heat driven actuators prepared by one-step laser direct writing. Smart Mater. Struct. 2019, 28, 105024. [Google Scholar] [CrossRef]
- Kim, M.; Lee, H.; Ahn, S. Laser Controlled 65 Micrometer Long Microrobot Made of Ni Shape Memory Alloy. Adv. Mater. Technol. 2019, 4, 1900583. [Google Scholar] [CrossRef]
- Tian, J.; Wang, T.; Fang, X. Design, fabrication and modeling analysis of a spiral support structure with superelastic Ni-Ti shape memory alloy for continuum robot. Smart Mater. Struct. 2020, 29, 045007. [Google Scholar] [CrossRef]
- Pilz da Cunha, M.; Ambergen, S.; Debije, M.G.; Homburg, E.F.; den Toonder, J.M.; Schenning, A.P. A Soft Transporter Robot Fueled by Light. Adv. Sci. 2020, 7, 1902842. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Robotics. Findings from Chonnam National University in the Area of Robotics Described (Magnetically Actuated Miniature Walking Soft Robot Based on Chained magnetic microparticles-embedded elastomer. Sens. Actuators A Phys. 2019, 301, 111707. [Google Scholar]
- Feng, M.; Wu, Y.; Wang, Y.; Zeng, J.; Bitoh, T.; Nomura, M.; Fujii, T. Investigation on the polishing of aspheric surfaces with a doughnut-shaped magnetic compound fluid (MCF) tool using an industrial robot. Precis. Eng. 2020, 61, 182–193. [Google Scholar] [CrossRef]
- Joyee, E.B.; Pan, Y. A Fully Three-Dimensional Printed Inchworm-Inspired Soft Robot with Magnetic Actuation. Soft Robot. 2019, 6, 333–345. [Google Scholar] [CrossRef] [PubMed]
- Xiang, H.B.; Li, Y.; Ba, J.C.; Wang, S.J.; Huang, X. Motion Characteristics of Magnetic Control Micro-soft Crawling Robot. Chin. J. Mech. Eng. 2020, 56, 39–47. [Google Scholar]
- McBride, N. Robot Enhanced Therapy for Autistic Children: An Ethical Analysis. IEEE Technol. Soc. Mag. 2020, 39, 51–60. [Google Scholar] [CrossRef]
- Valles-Peris, N.; Domenech, M. Roboticists’ Imaginaries of Robots for Care: The Radical Imaginary as a Tool for an Ethical Discussion. Eng. Stud. 2020, 12, 1–20. [Google Scholar] [CrossRef]
- Wu, B.Z.; Gu, J.X. Research on the ethical risks and countermeasures of clinical application of surgical robots. Chin. Med. Ethics 2020, 33, 17–20. [Google Scholar]
- Guan, Q.H.; Sun, J.; Liu, Y.J.; Leng, J.S. Development status and trend of pneumatic soft robots. Sci. China Technol. Sci. 2020, 50, 897–934. [Google Scholar]
- Jiao, Z.; Zhang, C.; Wang, W.; Pan, M.; Yang, H.; Zou, J. Advanced Artificial Muscle for Flexible Material-Based Reconfigurable Soft Robots. Adv. Sci. 2019, 6, 1901371. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zaoui, A.; Mahendra, V.; Mitchell, G.; Cherfi, Z.; Harrane, A.; Belbachir, M. Design, Synthesis and Thermo-chemical Properties of Rosin Vinyl Imidazolium Based Compounds as Potential Advanced Biocompatible Materials. Waste Biomass Valorization 2020, 11, 3723–3730. [Google Scholar] [CrossRef]
- Nafisa, G.; Maqsood, K.S.; Syed, K.; Saba, Z.; Atif, I.; Aneela, S.; Misbah, S.; Farieha, H.; Ullah, K.R.; Zahid, B.M.T. Designing of biocompatible and biodegradable chitosan based crosslinked hydrogel for in vitro release of encapsulated povidone-iodine: A clinical translation. Int. J. Biol. Macromol. 2020, 164, 4370–4380. [Google Scholar]
- Chikhaoui, M.T.; Benouhiba, A.; Rougeot, P.; Rabenorosoa, K.; Ouisse, M.; Andreff, N. Developments and Control of Biocompatible Conducting Polymer for Intracorporeal Continuum Robots. Ann. Biomed. Eng. 2018, 46, 1511–1521. [Google Scholar] [CrossRef] [Green Version]
- Bao, G.J.; Zhang, Y.Q.; Xu, Z.G.; Cai, S.B.; Xu, F.; Yang, Q.H.; Zhang, L.B. Overview of the research on the pneumatic drive structure of soft robots. High Technol. News 2019, 29, 467–479. [Google Scholar]
- Maeda, K.; Maeda, K.; Shinoda, H.; Tsumori, F. Miniaturization of worm-type soft robot actuated by magnetic field. Jpn. J. Appl. Phys. 2020, 59, SIIL04. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structure | Description | Advantage | References (Example) |
|---|---|---|---|
| Concentric Tube | Robot body consists of many pre-curved elastic tubes nested together. Its shape can be controlled by the axial translation and rotation of each tube seat. | Lightweight and slender. | [38,39] |
| Tendon/Cable | Robot body consists of tendons/cables arranged along the axis of the manipulator. The movement of CR is achieved by pulling the tendon/cable. | Relatively easy to realize and control. | [40,41,42,43,44,45] |
| Origami | The robot can be made into different origami shapes. Through the crease layout, the robot’s telescopic details are designed. | Lightweight and easy to manufacture. | [46] |
| Magnetic CR | Robot body consists of uniform soft polymer matrix and uniformly dispersed magnetic particles. The operator controls the external magnetic field through visual feedback to realize the motion of CR. | Smaller size and high flexibility. | [5,48] |
| Dual continuum mechanism | DCM consists of 2 distal segments, 2 proximal segment and some rigid guiding cannulae. Bending and length variations in the distal portion cause the opposite change in the proximal portion. | Easy to disassemble and disinfect; Mechanical properties can also be adjusted freely for different procedures. | [50,51,52] |
| Methods | Transition Time | Young’s Modulus | Deformation |
|---|---|---|---|
| Glass transition-based | Change with the environment | General | Mainly bending |
| Phase transition-based | >15 s | Relatively large | Mainly tensile deformation |
| Viscosity-based | - | Relatively small | Bending |
| Variable Stiffness Methods | Type of Control | Principle | Stiffness Range |
|---|---|---|---|
| Antagonistic actuation | Driving force | Antagonism | Small |
| Jamming-based | Pressure | Interparticle fiction | Wide |
| Layer jamming-based | Pressure | Interlayer friction | Small |
| Glass/phase transition-based | Thermal energy | Glass transition, phase transition | Do not adjust |
| Viscosity-based | Electric/magnetic field | Viscosity change | Do not adjust |
| Acoustic-based | Frequency | Acoustic field variation | Be further studied |
| Actuation Method | Description | Advantage |
|---|---|---|
| Concentric tube transmission [88,89,90,91,92,93,94,95] | Concentric tube robots are typically composed of nested precurved tubes and each independent concentric tube has 2-DOF. Concentric tube robots realize bending and twisting relying on the combined action caused by the relatively independent motion of each tube. The actuation system of Concentric tube robots is always modular and cascaded. | 1. Because of the independent motion and mutual cooperate of each tube, the robot motion has high dexterity and high DOF. |
| 2. High accessibility to narrow space(such as human body). | ||
| 3. The modular and cascaded design is beneficial for the compactness and miniaturization of the robot. | ||
| Tendon/cable driven [43,63,96] | Tendon-driven robots usually have an elastic and compliant backbone. The robot body is driven by the contraction and stretching of the tendon or cable driven by the motor. | 1.The elastic backbone is easily to realizing interaction with constrained environment. |
| 2. Robot has more compact size which, provide more position accuracy and more, operation precision in constrained space. | ||
| Pneumatic [97,98,99,100,101] | The principle of pneumatic is to cause the movement of the robot body with the help of the contraction and expansion of air cavity caused by inflation and deflation . | 1. Fast reaction speed and fast deformation. |
| 2. The weight of robot body is light and the structure is simple. | ||
| Smart materials driven [102,103,104,105,106,107,108,109] | Smart materials are usually used as raw materials for robots and play a role in the movement of robots. Under external stimuli, the robot will perform expected actions due to the properties of the material. | 1. High simplicity of the actuation system. |
| 2. High energy efficiency. | ||
| Magnetic actuation [110,111,112,113] | The robot realize expected motion under the magnetic field with the help of the arrangement of magnetic field and the application of magnetic material. | 1. The magnetic actuation can produce high-speed motion output and force output. |
| 2. Easily to realize remote wirelessly control. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhong, Y.; Hu, L.; Xu, Y. Recent Advances in Design and Actuation of Continuum Robots for Medical Applications. Actuators 2020, 9, 142. https://doi.org/10.3390/act9040142
Zhong Y, Hu L, Xu Y. Recent Advances in Design and Actuation of Continuum Robots for Medical Applications. Actuators. 2020; 9(4):142. https://doi.org/10.3390/act9040142
Chicago/Turabian StyleZhong, Yong, Luohua Hu, and Yinsheng Xu. 2020. "Recent Advances in Design and Actuation of Continuum Robots for Medical Applications" Actuators 9, no. 4: 142. https://doi.org/10.3390/act9040142
APA StyleZhong, Y., Hu, L., & Xu, Y. (2020). Recent Advances in Design and Actuation of Continuum Robots for Medical Applications. Actuators, 9(4), 142. https://doi.org/10.3390/act9040142