
Effects of Jumping Phase, Leading Limb, and Arena Surface Type on Forelimb Hoof Movement

 ,
,
Abstract
:Simple Summary
Abstract
1. Introduction
2. Materials and Methods
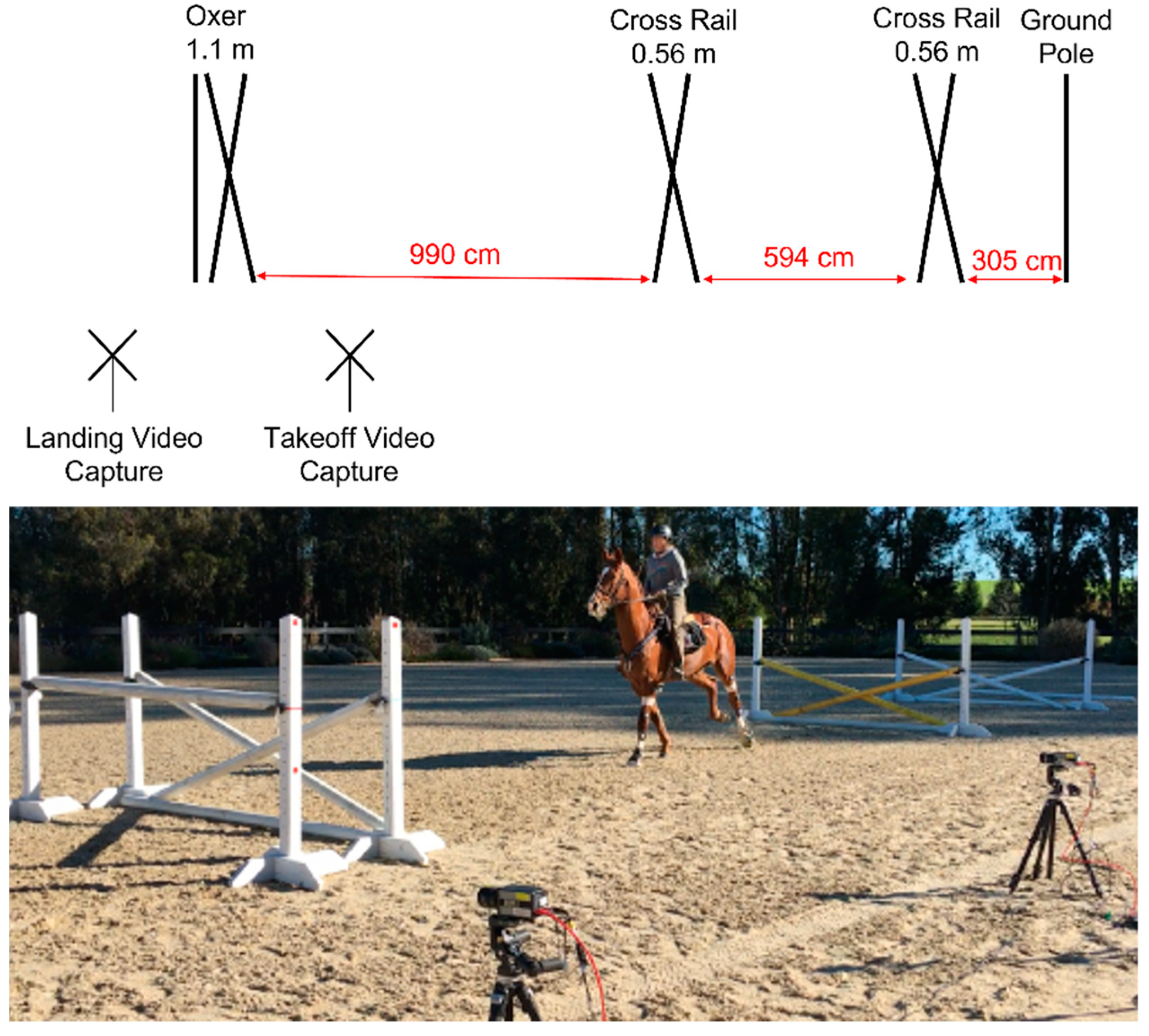
2.1. Study Design
2.2. Measurement of Hoof Movement
2.3. Measurement of Arena Surface Properties
2.4. Statistical Analysis
3. Results
3.1. Jump Characteristics
3.2. Characteristics of Hoof Motion during Stance
3.3. Hoof Movement during Slide
3.4. Hoof Movement during Support
3.5. Hoof Movement during Grab
3.6. Multivariate Stepwise Regression of Surface Properties with Hoof Movement Parameters
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hobbs, S.J.; Northropp, A.J.; Mahaffey, C.; Martin, J.H.; Murray, R.; Roepstorff, L.; Peterson, M. Equine Surfaces white Paper; Federation Equestre Internationale: Lausanne, Switzerland, 2014. [Google Scholar]
- Thomason, J.J.; Peterson, M.L. Biomechanical and mechanical investigations of the hoof-track interface in racing horses. Vet. Clin. N. Am. Equine Pract. 2008, 24, 53–77. [Google Scholar] [CrossRef]
- Johnston, C.; Roepstorff, L.; Drevemo, S.; Kallings, P. Kinematics of the distal hindlimb during stance phase in the fast trotting standardbred. Equine Vet. J. 1996, 28, 263–268. [Google Scholar] [CrossRef]
- Gustås, P.; Johnston, C.; Hedenström, U.; Roepstorff, L.; Drevemo, S. A field study on hoof deceleration at impact in standardbred trotters at various speeds. Equine Comp. Exerc. Physiol. 2006, 3, 161–168. [Google Scholar] [CrossRef]
- Pratt, G.W. Model for injury to the foreleg of the thoroughbred racehorse. Equine Vet. J. Suppl. 1997, 29, 30–32. [Google Scholar] [CrossRef] [PubMed]
- Gustås, P.; Johnston, C.; Roepstorff, L.; Drevemo, S. In vivo transmission of impact shock waves in the distal forelimb of the horse. Equine Vet. J. Suppl. 2001, 33, 11–15. [Google Scholar] [CrossRef]
- Gustås, P.; Johnston, C.; Drevemo, S. Ground reaction force and hoof deceleration patterns on two different surfaces at the trot. Equine Comp. Exerc. Physiol. 2006, 3, 209–216. [Google Scholar] [CrossRef]
- Crevier-Denoix, N.; Robin, D.; Pourcelot, P.; Falala, S.; Holden, L.; Estoup, P.; Desquilbet, L.; Denoix, J.M.; Chateau, H. Ground reaction force and kinematic analysis of limb loading on two different beach sand tracks in harness trotters. Equine Vet. J. 2010, 42, 544–551. [Google Scholar] [CrossRef]
- Riemersma, D.J.; Van Den Bogert, A.J.; Jansen, M.O.; Schamhardt, H.C. Influence of shoeing on ground reaction forces and tendon strains in the forelimbs of ponies. Equine Vet. J. 1996, 28, 126–132. [Google Scholar] [CrossRef]
- Egenvall, A.; Roepstorff, L.; Peterson, M.; Lundholm, M.; Hernlund, E. The descriptions and attitudes of riders and arena owners to 656 equestrian sport surfaces in Sweden. Front. Vet. Sci. 2021, 8, 798910. [Google Scholar] [CrossRef] [PubMed]
- Schamhardt, H.C.; Merkens, H.W.; Vogel, V.; Willekens, C. External loads on the limbs of jumping horses at take-off and landing. Am. J. Vet. Res. 1993, 54, 675–680. [Google Scholar]
- Deuel, N.R.; Park, J. Kinematic analysis of jumping sequences of olympic show jumping horses. Equine Exerc. Physiol. 1991, 3, 158–166. [Google Scholar]
- Deuel, N.R.; Park, J.-J. The gait patterns of olympic dressage horses. J. Appl. Biomech. 1990, 6, 198–226. [Google Scholar] [CrossRef]
- Barrey, E.; Landjerit, B.; Wolter, R. Shock and vibration during the hoof impact on different track surfaces. In Proceedings of the Third International Conference on Equine Physiology, Uppsala, Sweden, 15–19 July 1990; pp. 97–106. [Google Scholar]
- Chateau, H.; Robin, D.; Falala, S.; Pourcelot, P.; Valette, J.P.; Ravary, B.; Denoix, J.M.; Crevier-Denoix, N. Effects of a synthetic all-weather waxed track versus a crushed sand track on 3D acceleration of the front hoof in three horses trotting at high speed. Equine Vet. J. 2009, 41, 247–251. [Google Scholar] [CrossRef]
- Crevier-Denoix, N.; Pourcelot, P.; Holden-Douilly, L.; Camus, M.; Falala, S.; Ravary-Plumioën, B.; Vergari, C.; Desquilbet, L.; Chateau, H. Discrimination of two equine racing surfaces based on forelimb dynamic and hoof kinematic variables at the canter. Vet. J. 2013, 198, e124–e129. [Google Scholar] [CrossRef]
- Symons, J.E.; Garcia, T.C.; Stover, S.M. Distal hindlimb kinematics of galloping thoroughbred racehorses on dirt and synthetic racetrack surfaces. Equine Vet. J. 2014, 46, 227–232. [Google Scholar] [CrossRef]
- Hernlund, E.; Egenvall, A.; Roepstorff, L. Kinematic characteristics of hoof landing in jumping horses at elite level. Equine Vet. J. Suppl. 2010, 42, 462–467. [Google Scholar] [CrossRef]
- Rohlf, C.M.; Garcia, T.C.; Fyhrie, D.P.; le Jeune, S.S.; Peterson, M.L.; Stover, S.M. Shear ground reaction force variation among equine arena surfaces. Vet. J. 2023, 291, 105930. [Google Scholar] [CrossRef] [PubMed]
- Rohlf, C.M.; Garcia, T.C.; Fyhrie, D.P.; le Jeune, S.S.; Peterson, M.L.; Stover, S.M. Arena surface vertical impact forces vary with surface compaction. Vet. J. 2023, 293, 105955. [Google Scholar] [CrossRef] [PubMed]
- Hernlund, E.; Egenvall, A.; Hobbs, S.J.; Peterson, M.L.; Northrop, A.J.; Bergh, A.; Martin, J.H.; Roepstorff, L. Comparing subjective and objective evaluation of show jumping competition and warm-up arena surfaces. Vet. J. 2017, 227, 49–57. [Google Scholar] [CrossRef]
- Setterbo, J.J.; Chau, A.; Fyhrie, P.B.; Hubbard, M.; Upadhyaya, S.K.; Symons, J.E.; Stover, S.M. Validation of a laboratory method for evaluating dynamic properties of reconstructed equine racetrack surfaces. PLoS ONE 2012, 7, e50534. [Google Scholar] [CrossRef]
- Back, W.; Pille, F. The role of the hoof and shoeing. In Equine Locomotion; Back, W., Clayton, H.M., Eds.; Saunders Elsevier: Philadelphia, PA, USA, 2013; pp. 147–174. [Google Scholar]
- Rooney, J.R. Functional anatomy of the hoof. In Equine Podiatry; Floyd, A., Mansmann, R., Eds.; Saunders Elsevier: St. Louis, MO, USA, 2007; pp. 57–73. [Google Scholar]
- Murray, R.C.; Dyson, S.J.; Tranquille, C.; Adams, V. Association of type of sport and performance level with anatomical site of orthopaedic injury diagnosis. Equine Vet. J. 2006, 38, 411–416. [Google Scholar] [CrossRef] [PubMed]
- Cross, R. Measurements of the horizontal and vertical Speeds of tennis courts. Sports Eng. 2003, 6, 95–111. [Google Scholar] [CrossRef]
- Chateau, H.; Holden, L.; Robin, D.; Falala, S.; Pourcelot, P.; Estoup, P.; Denoix, J.-M.; Crevier-Denoix, N. Biomechanical analysis of hoof landing and stride parameters in harness trotter horses running on different tracks of a sand beach (from wet to dry) and on an asphalt road. Equine Vet. J. 2010, 42, 488–495. [Google Scholar] [CrossRef]
- Orlande, O.; Hobbs, S.J.; Martin, J.H.; Owen, A.G.; Northrop, A.J. Measuring hoof slip of the leading limb on jump landing over two different equine arena surfaces. Comp. Exerc. Physiol. 2012, 8, 33–39. [Google Scholar] [CrossRef]
- Medoff, H. Problems in defining and measuring friction on natural and artificial playing surfaces. In Proceedings of the 1995 Fourteenth Southern Biomedical Engineering Conference, Shreveport, LA, USA, 7–9 April 1995; pp. 171–174. [Google Scholar] [CrossRef]
- Nigg, B.M.; Yeadon, M.R. Biomechanical aspects of playing surfaces. J. Sports Sci. 1987, 5, 117–145. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Takeoff (n = 139) | Landing (n = 142) | p-Value | Leading (n = 135) | Trailing (n = 146) | p-Value | Dirt (n = 111) | Synthetic (n = 170) | p-Value |
|---|---|---|---|---|---|---|---|---|---|
| Slide Time (s) | 0.051 ± 0.003 | 0.052 ± 0.003 | 0.527 | 0.049 ± 0.003 | 0.055 ± 0.003 | 0.053 | 0.052 ± 0.003 | 0.052 ± 0.003 | 0.709 |
| Average Hoof Angle (°) | −8.6 ± 3.0 | 2.2 ± 3.0 | <0.001 * | −6.7 ± 3.0 | 0.3 ± 3.0 | <0.001 * | −3.6 ± 3.0 | −2.9 ± 3.0 | 0.289 |
| Horizontal Hoof Motion | |||||||||
| Displacement of Toe (cm) | 3.6 ± 0.5 | 2.1 ± 0.5 | <0.001 * | 4.1 ± 0.5 | 1.6 ± 0.5 | <0.001 * | 3.0 ± 0.5 | 2.7 ± 0.5 | 0.108 |
| Displacement of Heel (cm) | 2.6 ± 0.5 | 1.6 ± 0.5 | <0.001 * | 3.1 ± 0.5 | 1.0 ± 0.5 | <0.001 * | 2.3 ± 0.5 | 1.9 ± 0.5 | 0.105 |
| Average Velocity of Toe (m/s) | 0.71 ± 0.11 | 0.50 ± 0.11 | <0.001 * | 0.86 ± 0.11 | 0.35 ± 0.11 | <0.001 * | 0.65 ± 0.11 | 0.56 ± 0.11 | 0.081 |
| Average Velocity of Heel (m/s) | 0.52 ± 0.11 | 0.42 ± 0.11 | 0.038 * | 0.67 ± 0.11 | 0.26 ± 0.11 | <0.001 * | 0.52 ± 0.11 | 0.42 ± 0.11 | 0.075 |
| Average Deceleration of Toe (m/s2) | 33.4 ± 6.9 | 27.6 ± 6.9 | 0.087 | 46.2 ± 7.0 | 14.8 ± 7.0 | <0.001 * | 32.0 ± 7.0 | 28.9 ± 6.8 | 0.368 |
| Average Deceleration of Heel (m/s2) | 21.1 ± 8.1 | 26.3 ± 8.1 | 0.143 | 36.0 ± 8.2 | 11.4 ± 8.2 | <0.001 * | 22.6 ± 8.2 | 24.9 ± 8.0 | 0.509 |
| Vertical Hoof Motion | |||||||||
| Displacement of Toe (cm) | 5.3 ± 2.5 | 1.6 ± 2.5 | <0.001 * | 4.0 ± 2.6 | 2.9 ± 2.6 | <0.001 * | 3.1 ± 2.6 | 3.8 ± 2.5 | 0.002 * |
| Displacement of Heel (cm) | 2.0 ± 2.5 | 3.8 ± 2.5 | <0.001 * | 2.2 ± 2.5 | 3.5 ± 2.5 | <0.001 * | 2.6 ± 2.5 | 3.2 ± 2.4 | 0.058 |
| Average Velocity of Toe (m/s) | 1.06 ± 0.08 | 0.35 ± 0.08 | <0.001 * | 0.81 ± 0.08 | 0.59 ± 0.08 | <0.001 * | 0.63 ± 0.08 | 0.77 ± 0.08 | 0.002 * |
| Average Velocity of Heel (m/s) | 0.38 ± 0.05 | 0.72 ± 0.05 | <0.001 * | 0.47 ± 0.05 | 0.63 ± 0.05 | <0.001 * | 0.49 ± 0.05 | 0.60 ± 0.05 | 0.044 * |
| Variable | Takeoff (n = 139) | Landing (n = 142) | p-Value | Leading (n = 135) | Trailing (n = 146) | p-Value | Dirt (n = 111) | Synthetic (n = 170) | p-Value |
|---|---|---|---|---|---|---|---|---|---|
| Support Time (s) | 0.120 ± 0.003 | 0.108 ± 0.003 | <0.001 * | 0.122 ± 0.003 | 0.107 ± 0.003 | <0.001 * | 0.115 ± 0.003 | 0.114 ± 0.003 | 0.436 |
| Average Hoof Angle (°) | −5.9 ± 2.9 | −1.9 ± 2.9 | <0.001 * | −5.5 ± 2.9 | −2.2 ± 2.9 | <0.001 * | −4.7 ± 2.9 | −3.1 ± 2.9 | 0.008 * |
| Horizontal Hoof Motion | |||||||||
| Displacement of Toe (cm) | Range: [−0.6, 0.9] Median: −0.03 | Range: [−2.3, 0.6] Median: −0.11 | <0.001 * | Range: [−0.6, 0.6] Median: −0.11 | Range: [−2.3, 0.9] Median: −0.03 | 0.122 | Range: [−2.3, 0.9] Median: −0.08 | Range: [−0.9, 0.3] Median: −0.05 | 0.958 |
| Displacement of Heel (cm) | Range: [−0.8, 0.9] Median: −0.06 | Range: [−2.3, 0.5] Median: −0.12 | 0.004 * | Range: [−0.8, 0.3] Median: −0.16 | Range: [−2.3, 0.9] Median: −0.03 | 0.015 * | Range: [−2.3, 0.9] Median: −0.13 | Range: [−0.9, 0.2] Median: −0.08 | 0.184 |
| Average Velocity of Toe (m/s) | Range: [−0.05, 0.08] Median: −0.003 | Range: [−0.41, 0.06] Median: −0.011 | <0.001 * | Range: [−0.05, 0.06] Median: −0.010 | Range: [−0.41, 0.08] Median: −0.003 | 0.577 | Range: [−0.41, 0.08] Median: −0.007 | Range: [−0.09, 0.04] Median: −0.006 | 0.779 |
| Average Velocity of Heel (m/s) | Range: [−0.07, 0.08] Median: −0.006 | Range: [−0.41, 0.05] Median: −0.011 | <0.001 * | Range: [−0.07, 0.03] Median: −0.013 | Range: [−0.41, 0.08] Median: −0.004 | 0.168 | Range: [−0.41, 0.08] Median: −0.011 | Range: [−0.09, 0.02] Median: −0.008 | 0.148 |
| Vertical Hoof Motion | |||||||||
| Displacement of Toe (cm) | Range: [−0.2, 2.9] Median: 0.32 | Range: [−0.3, 1.9] Median: 0.20 | <0.001 * | Range: [−0.1, 2.9] Median: 0.36 | Range: [−0.3, 2.1] Median: 0.18 | <0.001 * | Range: [−0.3, 2.9] Median: 0.27 | Range: [−0.9, 2.2] Median: 0.08 | 0.515 |
| Displacement of Heel (cm) | 0.13 ± 0.04 | 0.22 ± 0.04 | <0.001 * | 0.07 ± 0.04 | 0.22 ± 0.04 | <0.001 * | 0.17 ± 0.04 | 0.18 ± 0.04 | 0.923 |
| Average Velocity of Toe (m/s) | Range: [−0.02, 0.29] Median: 0.026 | Range: [−0.02, 0.16] Median: 0.018 | <0.001 * | Range: [−0.02, 0.29] Median: 0.028 | Range: [−0.02, 0.20] Median: 0.015 | 0.002 * | Range: [−0.02, 0.29] Median: 0.023 | Range: [−0.02, 0.07] Median: 0.023 | 0.871 |
| Average Velocity of Heel (m/s) | 0.009 ± 0.003 | 0.021 ± 0.003 | <0.001 * | 0.004 ± 0.004 | 0.025 ± 0.004 | <0.001 * | 0.015 ± 0.004 | 0.014 ± 0.003 | 0.473 |
| Variable | Takeoff (n = 139) | Landing (n = 142) | p-Value | Leading (n = 135) | Trailing (n = 146) | p-Value | Dirt (n = 111) | Synthetic (n = 170) | p-Value |
|---|---|---|---|---|---|---|---|---|---|
| Grab Time (s) | 0.042 ± 0.002 | 0.040 ± 0.002 | 0.092 | 0.041 ± 0.002 | 0.041 ± 0.002 | 0.940 | 0.040 ± 0.002 | 0.042 ± 0.002 | 0.017* |
| Average SHA (°) | 14.7 ± 2.9 | 21.6 ± 3.0 | <0.001 * | 15.8 ± 3.0 | 20.5 ± 3.0 | <0.001 * | 17.8 ± 3.0 | 18.6 ± 2.9 | 0.304 |
| Horizontal Hoof Motion | |||||||||
| Displacement of Toe (cm) | −2.0 ± 0.3 | −4.1 ± 0.3 | <0.001 * | −2.9 ± 0.4 | −3.3 ± 0.3 | 0.210 | −3.2 ± 0.3 | −2.9 ± 0.3 | 0.054 |
| Displacement of Heel (cm) | 3.5 ± 0.7 | 4.9 ± 0.7 | <0.001 * | 3.6 ± 0.7 | 4.8 ± 0.7 | <0.001 * | 3.8 ± 0.7 | 4.7 ± 0.7 | 0.019 * |
| Average Velocity of Toe (m/s) | −0.48 ± 0.07 | −0.98 ± 0.07 | <0.001 * | −0.70 ± 0.07 | −0.76 ± 0.07 | 0.419 | −0.79 ± 0.07 | −0.67 ± 0.07 | 0.026 * |
| Average Velocity of Heel (m/s) | 1.00 ± 0.20 | 1.54 ± 0.20 | <0.001 * | 1.10 ± 0.20 | 1.44 ± 0.20 | <0.001 * | 1.19 ± 0.20 | 1.35 ± 0.20 | 0.145 |
| Vertical Hoof Motion | |||||||||
| Displacement of Toe (cm) | 0.1± 0.4 | 0.1 ± 0.4 | 0.830 | 0.3 ± 0.4 | −0.1 ± 0.4 | 0.046 * | 0.5 ± 0.4 | −0.3 ± 0.4 | <0.001 * |
| Displacement of Heel (cm) | −10.9 ± 0.4 | −11.9 ± 0.4 | <0.001 * | −11.0 ± 0.4 | −11.9 ± 0.4 | 0.001 * | −11.2 ± 0.4 | −11.7 ± 0.4 | 0.250 |
| Average Velocity of Toe (m/s) | −0.12 ± 0.11 | −0.20 ± 0.11 | 0.117 | −0.11 ± 0.11 | −0.21 ± 0.11 | 0.015 * | −0.07 ± 0.11 | −0.25 ± 0.11 | 0.002 * |
| Average Velocity of Heel (m/s) | −2.82 ± 0.17 | −3.19 ± 0.17 | <0.001 * | −2.88 ± 0.17 | −3.14 ± 0.17 | <0.001 * | −3.03 ± 0.17 | −2.98 ± 0.16 | 0.344 |
| Variable | Observations | Dirt | Synthetic | p-Value |
|---|---|---|---|---|
| Compositional Properties | ||||
| Fiber Content (%) 1 | 12 | 0.12 ± 0.98 Median 0 Range [0, 0.6] | 4.03 ± 0.83 Median 3.4 Range [1.5, 10] | <0.001 2 |
| Sand Content (%) | 12 | 84.6 ± 3.67 | 78.14 ± 3.11 | 0.210 |
| Silt Content (%) | 12 | 10.46 ± 2.54 | 12.31 ± 2.15 | 0.590 |
| Clay Content (%) | 12 | 4.83 ± 1.08 | 5.51± 0.91 | 0.639 |
| Average Particle Size (mm) | 12 | 0.74 ± 0.12 | 0.40 ± 0.10 | 0.051 |
| Standard Deviation of Particle Size (mm) | 12 | 1.00 ± 0.13 | 0.60 ± 0.11 | 0.042 2 |
| Average Fiber Length (mm) 1 | 7 | N/A | 27.7 ± 2.0 Median 24.8 Range [23.6, 38.3] | N/A |
| Standard Deviation of Fiber Length (mm) 1 | 7 | N/A | 11.8 ± 1.8 Median 10.7 Range [6.0, 20.9] | N/A |
| Manageable Properties | ||||
| Surface Temperature (°C) | 59 | 26.0 ± 2.3 | 13.9 ± 1.9 | 0.002 2 |
| Cushion Depth (mm) | 59 | 34.9 ± 7.5 | 53.2 ± 6.3 | 0.090 |
| Moisture Content (%) | 59 | 3.30 ± 2.37 | 9.84 ± 2.00 | 0.062 |
| Shear Properties | ||||
| Adhesion (N) | 46 | 30.0 ± 10.0 | 3.5 ± 8.4 | 0.078 |
| Coefficient of Friction | 46 | 0.37 ± 0.03 | 0.44 ± 0.02 | 0.065 |
| Normalized Maximum Shear Force (Fmax/FN) | 46 | 0.43 ± 0.02 | 0.46 ± 0.02 | 0.322 |
| Vertical Impact Properties | ||||
| Maximum Vertical Impact Force (kN) | 58 | 15.2 ± 1.3 | 13.7 ± 1.1 | 0.379 |
| Impulse (N × s) | 58 | 69.0 ± 1.0 | 72.1 ± 0.8 | 0.039 2 |
| Loading Rate (kN/s) | 58 | 4679 ± 568 | 3155 ± 473 | 0.066 |
| Maximum Vertical Displacement (cm) | 58 | 1.76 ± 0.18 | 2.07 ± 0.15 | 0.157 |
| Soil Rebound (cm) | 58 | 0.11 ± 0.03 | 0.23 ± 0.02 | 0.010 2 |
| Dissipated Energy (J) | 58 | 80.9 ± 1.5 | 79.8 ± 1.3 | 0.591 |
| Stiffness (kN/m) | 58 | 2477 ± 332 | 1602 ± 273 | 0.069 |
| Maximum Deceleration (g) | 58 | 63.6 ± 5.1 | 56.7 ± 4.3 | 0.322 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rohlf, C.M.; Garcia, T.C.; Marsh, L.J.; Acutt, E.V.; le Jeune, S.S.; Stover, S.M. Effects of Jumping Phase, Leading Limb, and Arena Surface Type on Forelimb Hoof Movement. Animals 2023, 13, 2122. https://doi.org/10.3390/ani13132122
Rohlf CM, Garcia TC, Marsh LJ, Acutt EV, le Jeune SS, Stover SM. Effects of Jumping Phase, Leading Limb, and Arena Surface Type on Forelimb Hoof Movement. Animals. 2023; 13(13):2122. https://doi.org/10.3390/ani13132122
Chicago/Turabian StyleRohlf, Christina M., Tanya C. Garcia, Lyndsey J. Marsh, Elizabeth V. Acutt, Sarah S. le Jeune, and Susan M. Stover. 2023. "Effects of Jumping Phase, Leading Limb, and Arena Surface Type on Forelimb Hoof Movement" Animals 13, no. 13: 2122. https://doi.org/10.3390/ani13132122
APA StyleRohlf, C. M., Garcia, T. C., Marsh, L. J., Acutt, E. V., le Jeune, S. S., & Stover, S. M. (2023). Effects of Jumping Phase, Leading Limb, and Arena Surface Type on Forelimb Hoof Movement. Animals, 13(13), 2122. https://doi.org/10.3390/ani13132122