
Assessment of Preference Behavior of Layer Hens under Different Light Colors and Temperature Environments in Long-Time Footage Using a Computer Vision System
 ,
,  ,
,  and
and 
Abstract
:Simple Summary
Abstract
1. Introduction
2. Materials and Methods
2.1. Experimental Design
2.2. Preference Behavior Monitoring
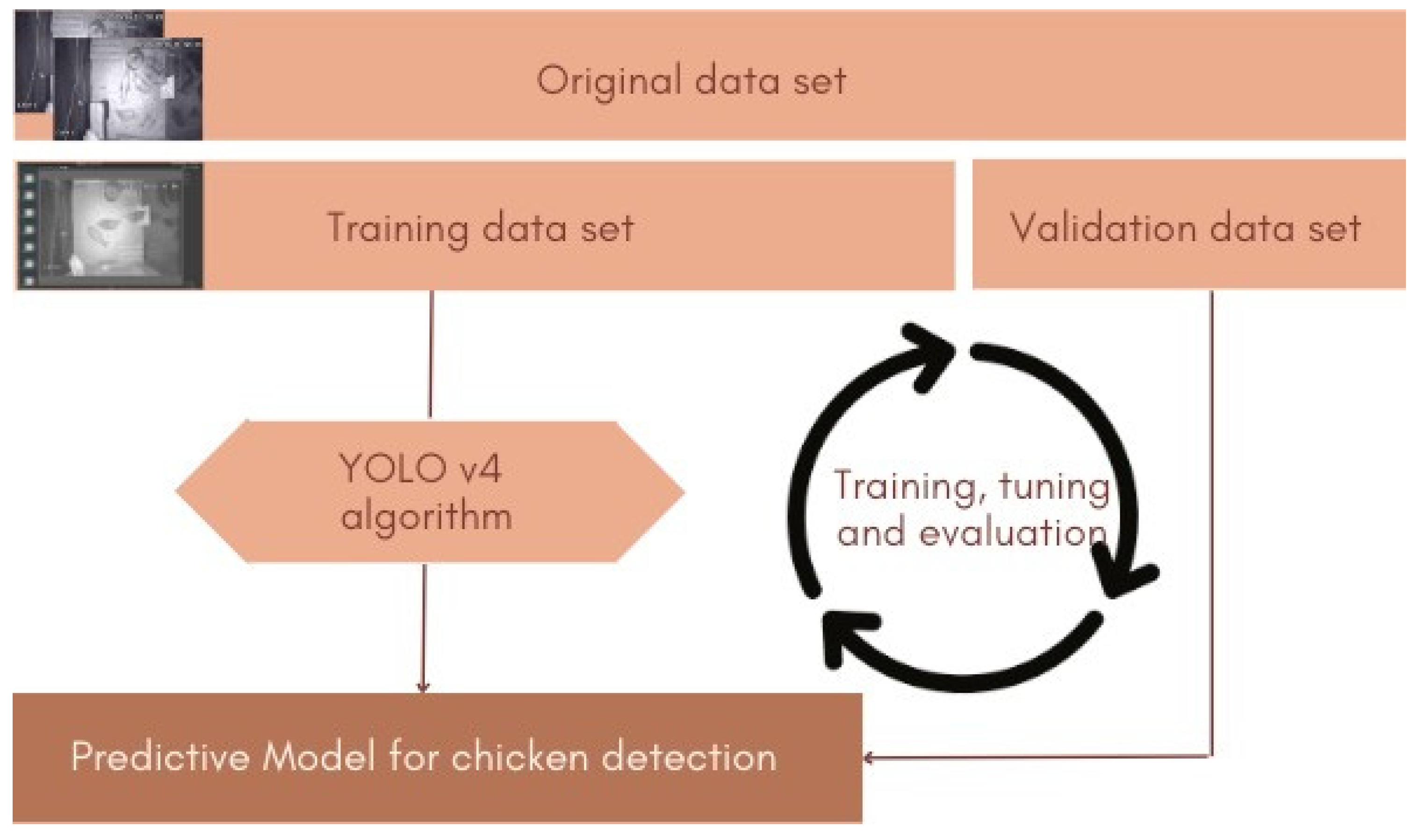
2.3. Bird Detection Workflow
2.3.1. Computer Vision Model Design
2.3.2. Validation of the Bird Detection Model
2.4. Preference Behavior Analysis
2.4.1. Unrest Index Computation
2.4.2. Permanence Time Estimation
3. Results
3.1. Detection Model Validation
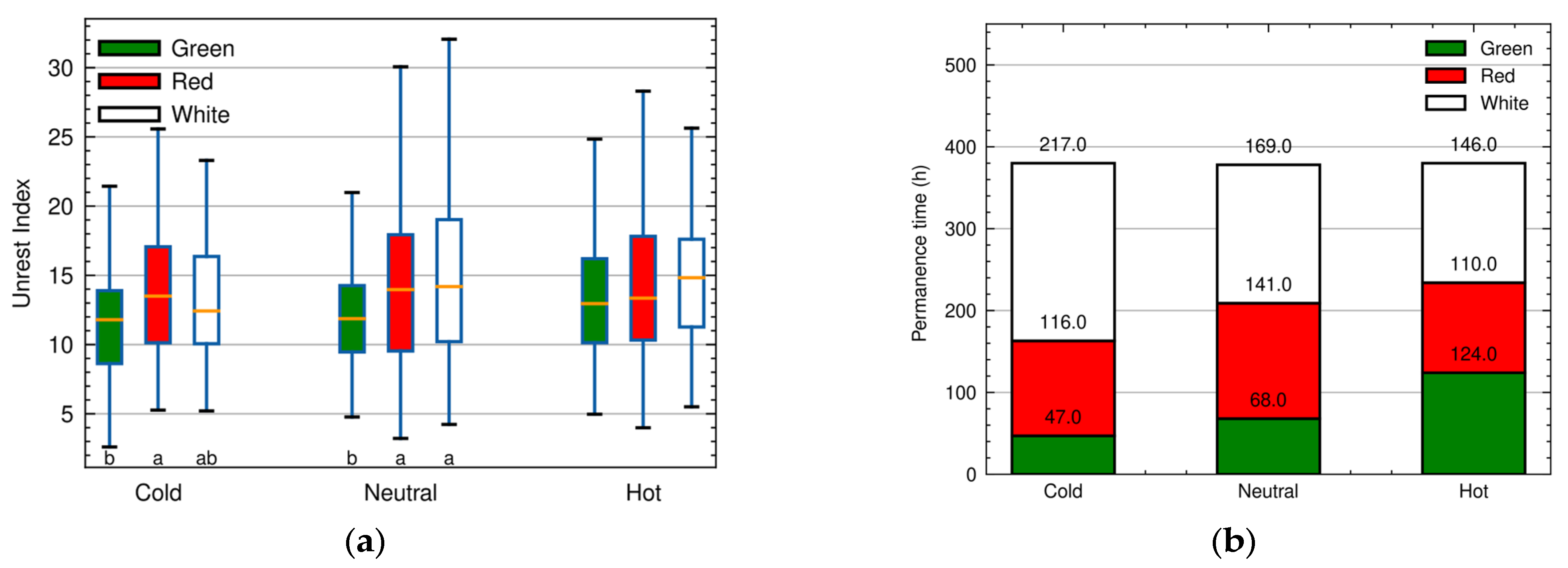
3.2. Unrest Index Analysis
3.3. Bird Permanence Time
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mohammed, H.; Grashorn, M.; Bessei, W. The effects of lighting conditions on the behaviour of laying hens. Arch. Geflügelkunde 2010, 74, 197–202. [Google Scholar]
- Jácome, I.; Rossi, L.; Borille, R. Influence of artificial lighting on the performance and egg quality of commercial layers: A review. Braz. J. Poult. Sci. 2014, 16, 337–344. [Google Scholar] [CrossRef]
- Elkomy, H.E.; Taha, A.E.; Basha, H.A.; Abo-Samaha, M.I.; Sharaf, M.M. Growth and reproduction performance of japanese quails (Coturnix coturnix japonica) under various environments of light colors. Slov. Vet. Res. 2019, 56, 119–127. [Google Scholar]
- Xie, D.; Wang, Z.; Dong, Y.; Cao, J.; Wang, J.; Chen, J.; Chen, Y. Effects of monochromatic light on immune response of broilers. Poult. Sci. 2008, 87, 1535–1539. [Google Scholar] [CrossRef]
- Prescott, N.; Wathes, C.M.; Jarvis, J. Light, vision and the welfare of poultry. Anim. Welf. 2003, 12, 269–288. [Google Scholar] [CrossRef]
- Lewis, P.; Morris, T. Poultry and coloured light. World’s Poult. Sci. J. 2000, 56, 189–207. [Google Scholar] [CrossRef]
- Huber-Eicher, B.; Suter, A.; Spring-Stähli, P. Effects of colored light-emitting diode illumination on behavior and performance of laying hens. Poult. Sci. 2013, 92, 869–873. [Google Scholar] [CrossRef] [PubMed]
- Baxter, M.; O’Connell, N.E. Testing ultra-wideband technology as a method of tracking fast-growing broilers under commercial conditions. Appl. Anim. Behav. Sci. 2020, 233, 105150. [Google Scholar] [CrossRef]
- Hassan, M.R.; Sultana, S.; Choe, H.S.; Ryu, K.S. Effect of combinations of monochromatic led light color on the performance and behavior of laying hens. J. Poult. Sci. 2014, 51, 321–326. [Google Scholar] [CrossRef] [Green Version]
- Liu, K.; Xin, H.; Sekhon, J.; Wang, T. Effect of fluorescent vs. poultry-specific light-emitting diode lights on production performance and egg quality of w-36 laying hens. Poult. Sci. 2018, 97, 834–844. [Google Scholar] [CrossRef] [PubMed]
- Hassan, M.R.; Sultana, S.; Choe, H.S.; Ryu, K.S. Effect of monochromatic and combined light colour on performance, blood parameters, ovarian morphology and reproductive hormones in laying hens. Ital. J. Anim. Sci. 2013, 12, e56. [Google Scholar] [CrossRef] [Green Version]
- Rozenboim, I.; Piestun, Y.; Mobarkey, N.; Barak, M.; Hoyzman, A.; Halevy, O. Monochromatic light stimuli during embryogenesis enhance embryo development and posthatch growth. Poult. Sci. 2004, 83, 1413–1419. [Google Scholar] [CrossRef]
- Zhang, Z.; Cao, J.; Wang, Z.; Dong, Y.; Chen, Y. Effect of a combination of green and blue monochromatic light on broiler immune response. J. Photochem. Photobiol. B Biol. 2014, 138, 118–123. [Google Scholar] [CrossRef]
- Shi, H.; Li, B.; Tong, Q.; Zheng, W.; Zeng, D.; Feng, G. Effects of LED light color and intensity on feather pecking and fear responses of layer breeders in natural mating colony cages. Animals 2019, 9, 814. [Google Scholar] [CrossRef] [Green Version]
- Er, D.; Wang, Z.; Cao, J.; Chen, Y. Effect of monochromatic light on the egg quality of laying hens. J. Appl. Poult. Res. 2007, 16, 605–612. [Google Scholar] [CrossRef]
- Pyrzak, R.; Snapir, N.; Goodman, G.; Perek, M. The effect of light wavelength on the production and quality of eggs of the domestic hen. Theriogenology 1987, 28, 947–960. [Google Scholar] [CrossRef]
- Gongruttananun, N. Influence of red light on reproductive performance, eggshell ultrastructure, and eye morphology in thai-native hens. Poult. Sci. 2011, 90, 2855–2863. [Google Scholar] [CrossRef]
- Min, J.K.; Hossan, M.S.; Nazma, A.; Jae, C.N.; Han, T.B.; Hwan, K.K.; Dong, W.K.; Hyun, S.C.; Hee, C.C.; Ok, S.S. Effect of monochromatic light on sexual maturity, production performance and egg quality of laying hens. Avian Biol. Res. 2012, 5, 69–74. [Google Scholar] [CrossRef]
- Tulbure, A.A.; Tulbure, A.A.; Dulf, E.H. A review on modern defect detection models using dcnns–deep convolutional neural networks. J. Adv. Res. 2022, 35, 33–48. [Google Scholar] [CrossRef] [PubMed]
- Kamilaris, A.; Prenafeta-Boldú, F.X. Deep learning in agriculture: A survey. Comput. Electron. Agric. 2018, 147, 70–90. [Google Scholar] [CrossRef] [Green Version]
- Sudebi, S.; Bist, R.; Yang, X.; Chai, L. Tracking pecking behaviors and damages of cage-free laying hens with machine vision technologies. Comput. Electron. Agric. 2023, 204, 107545. [Google Scholar] [CrossRef]
- Yang, X.; Bist, R.; Sudebi, S.; Wu, Z.; Liu, T.; Chai, L. An automatic classifier for monitoring applied behaviors of cage-free laying hens with deep learning. Eng. Appl. Artif. Intell. 2023, 123, 106377. [Google Scholar] [CrossRef]
- Guo, Y.; Regmi, P.; Ding, Y.; Bist, R.B.; Chai, L. Automatic Detection of Brown Hens in Cage Free Houses with Deep Learning Methods. Poult. Sci. 2023, 102, 102784. [Google Scholar] [CrossRef] [PubMed]
- Pu, H.; Lian, J.; Fan, M. Automatic recognition of flock behavior of chickens with convolutional neural network and kinect sensor. Int. J. Pattern Recognit. Artif. Intell. 2018, 32, 1850023. [Google Scholar] [CrossRef]
- Lin, C.Y.; Hsieh, K.W.; Tsai, Y.C.; Kuo, Y.F. Monitoring chicken heat stress using deep convolutional neural networks. In Proceedings of the 2018 ASABE Annual International Meeting, American Society of Agricultural and Biological Engineers, Detroit, MI, USA, 29 July–1 August 2018; p. 1. [Google Scholar]
- Wang, J.; Shen, M.; Liu, L.; Xu, Y.; Okinda, C. Recognition and classification of broiler droppings based on deep convolutional neural network. J. Sens. 2019, 2019, 3823515. [Google Scholar] [CrossRef] [Green Version]
- Zhuang, X.; Zhang, T. Detection of sick broilers by digital image processing and deep learning. Biosyst. Eng. 2019, 179, 106–116. [Google Scholar] [CrossRef]
- Siriani, A.L.R.; Kodaira, V.; Mehdizadeh, S.A.; de Alencar Nääs, I.; de Moura, D.J.; Pereira, D.F. Detection and tracking of chickens in low-light images using YOLO network and kalman filter. Neural Comput. Appl. 2022, 34, 21987–21997. [Google Scholar] [CrossRef]
- Ma, H.; Xin, H.; Zhao, Y.; Li, B.; Shepherd, T.; Alvarez, I. Assessment of lighting needs by w-36 laying hens via preference test. Animal 2016, 10, 671–680. [Google Scholar] [CrossRef]
- Bizeray, D.; Estevez, I.; Leterrier, C.; Faure, J. Effects of increasing environmental complexity on the physical activity of broiler chickens. Appl. Anim. Behav. Sci. 2002, 79, 27–41. [Google Scholar] [CrossRef]
- Grebey, T.C.; Ali, A.B.; Swanson, J.C.; Widowski, T.M.; Siegford, J.M. Dust bathing in laying hens: Strain, proximity to, and number of conspecifics matter. Poult. Sci. 2020, 99, 4103–4112. [Google Scholar] [CrossRef] [PubMed]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLO9000: Better, faster, stronger. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 7263–7271. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLOv3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Bochkovskiy, A.; Wang, C.Y.; Liao, H.Y.M. YOLOv4: Optimal speed and accuracy of object detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Agranonik, M.; Hirakata, V.N. Cálculo de tamanho de amostra: Proporções. Clin. Biomed. Res. 2011, 31, 382–388. [Google Scholar]
- Redmon, J. Darknet: Open-Source Neural Networks. 2013–2016. Available online: http://pjreddie.com/darknet/ (accessed on 10 March 2021).
- Kumar, A.; Kalia, A.; Kalia, A. ETL-YOLO v4: A face mask detection algorithm in era of COVID-19 pandemic. Optik 2022, 259, 169051. [Google Scholar] [CrossRef]
- Del Valle, J.E.; Pereira, D.F.; Neto, M.M.; Gabriel Filho, L.R.A.; Salgado, D.D. Unrest index for estimating thermal comfort of poultry birds (Gallus gallus domesticus) using computer vision techniques. Biosyst. Eng. 2021, 206, 123–134. [Google Scholar] [CrossRef]
- Mendoza, A.V.; Weimer, S.; Williams, Z. Can UV light induce movement in cage-free laying hens? J. Appl. Poult. Res. 2023, 32, 100350. [Google Scholar] [CrossRef]
- Geng, A.L.; Zhang, Y.; Zhang, J.; Wang, H.H.; Chu, Q.; Yan, Z.X.; Liu, H.G. Effects of light regime on circadian rhythmic behavior and reproductive parameters in native laying hens. Poult. Sci. 2022, 101, 101808. [Google Scholar] [CrossRef]
- Sun, H.; Zhao, P.; Su, Y.; Zhao, Q.; Li, X.; Bao, J. Effects of different cage sizes and nest settings on laying hen nesting behavior and the proportion of dirty eggs in furnished cages. Appl. Anim. Behav. Sci. 2023, 262, 105917. [Google Scholar] [CrossRef]
- Govardovskii, V.; Zueva, L. Visual pigments of chicken and pigeon. Vis. Res. 1977, 17, 537–543. [Google Scholar] [CrossRef] [PubMed]
- Hart, N.; Partridge, J.; Cuthill, I. Visual pigments, cone oil droplets, ocular media and predicted spectral sensitivity in the domestic turkey (Meleagris gallopavo). Vis. Res. 1999, 39, 3321–3328. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Prescott, N.; Wathes, C. Spectral sensitivity of the domestic fowl (gallus g. domesticus). Br. Poult. Sci. 1999, 40, 332–339. [Google Scholar] [CrossRef] [PubMed]
- Gunnarsson, S.; Heikkilä, M.; Hultgren, J.; Valros, A. A note on light preference in layer pullets reared in incandescent or natural light. Appl. Anim. Behav. Sci. 2008, 112, 395–399. [Google Scholar] [CrossRef]
- Prayitno, D.; Phillips, C.; Stokes, D. The effects of color and intensity of light on behavior and leg disorders in broiler chickens. Poult. Sci. 1997, 76, 1674–1681. [Google Scholar] [CrossRef] [PubMed]
- Rierson, R.D. Broiler Preference for Light Color and Feed Form, and the Effect of Light on Growth and Performance of Broiler Chicks. Master’s Thesis, College of Agriculture, Kansas State University, Manhattan, KS, USA, 2011; p. 62. [Google Scholar]
- Sultana, S.; Hassan, M.R.; Choe, H.S.; Ryu, K.S. The effect of monochromatic and mixed led light colour on the behaviour and fear responses of broiler chicken. Avian Biol. Res. 2013, 6, 207–214. [Google Scholar] [CrossRef]
- Hesham, M.; El Shereen, A.; Enas, S. Impact of different light colors in behavior, welfare parameters and growth performance of fayoumi broiler chickens strain. J. Hell. Vet. Med. Soc. 2018, 69, 951–958. [Google Scholar] [CrossRef] [Green Version]
- Khaliq, T.; Khan, A.; Dar, P.A.; Nazir, T.; Afzal, I.; Bilal, M.; Tarique, P. Behavioral study of broilers reared under different colours of light in the evening hours. J. Entomol. Zool. Stud. 2018, 6, 1624–1627. [Google Scholar]
- Archer, G.S. How does red light affect layer production, fear, and stress? Poult. Sci. 2019, 98, 3–8. [Google Scholar] [CrossRef] [PubMed]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Exp. | Thermal | Compartment |
|---|---|---|
| # | Env. | ABC |
| 1 | WGR | |
| 2 | Hot (35 °C) | RWG |
| 3 | GRW | |
| 4 | WGR | |
| 5 | Neutral (24 °C) | RWG |
| 6 | GRW | |
| 7 | WGR | |
| 8 | Cold (17 °C) | RWG |
| 9 | GRW |
| Light | Temperature | |||||
|---|---|---|---|---|---|---|
| Cold | Comfort | Heat | ||||
| Green | 291.3 ± 65.7 | A,B,c | 453.9 ± 93.0 | A,b | 824.1 ± 85.7 | A |
| Red | 670.0 ± 207.0 | b | 936.0 ± 140.0 | a | 728.0 ± 108.0 | |
| White | 1354.0 ± 165.0 | a | 1131.0 ± 127.0 | a | 974.0 ± 134.0 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kodaira, V.; Siriani, A.L.R.; Medeiros, H.P.; De Moura, D.J.; Pereira, D.F. Assessment of Preference Behavior of Layer Hens under Different Light Colors and Temperature Environments in Long-Time Footage Using a Computer Vision System. Animals 2023, 13, 2426. https://doi.org/10.3390/ani13152426
Kodaira V, Siriani ALR, Medeiros HP, De Moura DJ, Pereira DF. Assessment of Preference Behavior of Layer Hens under Different Light Colors and Temperature Environments in Long-Time Footage Using a Computer Vision System. Animals. 2023; 13(15):2426. https://doi.org/10.3390/ani13152426
Chicago/Turabian StyleKodaira, Vanessa, Allan Lincoln Rodrigues Siriani, Henry Ponti Medeiros, Daniella Jorge De Moura, and Danilo Florentino Pereira. 2023. "Assessment of Preference Behavior of Layer Hens under Different Light Colors and Temperature Environments in Long-Time Footage Using a Computer Vision System" Animals 13, no. 15: 2426. https://doi.org/10.3390/ani13152426
APA StyleKodaira, V., Siriani, A. L. R., Medeiros, H. P., De Moura, D. J., & Pereira, D. F. (2023). Assessment of Preference Behavior of Layer Hens under Different Light Colors and Temperature Environments in Long-Time Footage Using a Computer Vision System. Animals, 13(15), 2426. https://doi.org/10.3390/ani13152426