Mixed Reality Simulation of High-Endurance Unmanned Aerial Vehicle with Dual-Head Electromagnetic Propulsion Devices for Earth and Other Planetary Explorations


Abstract
:1. Introduction
2. Methodology
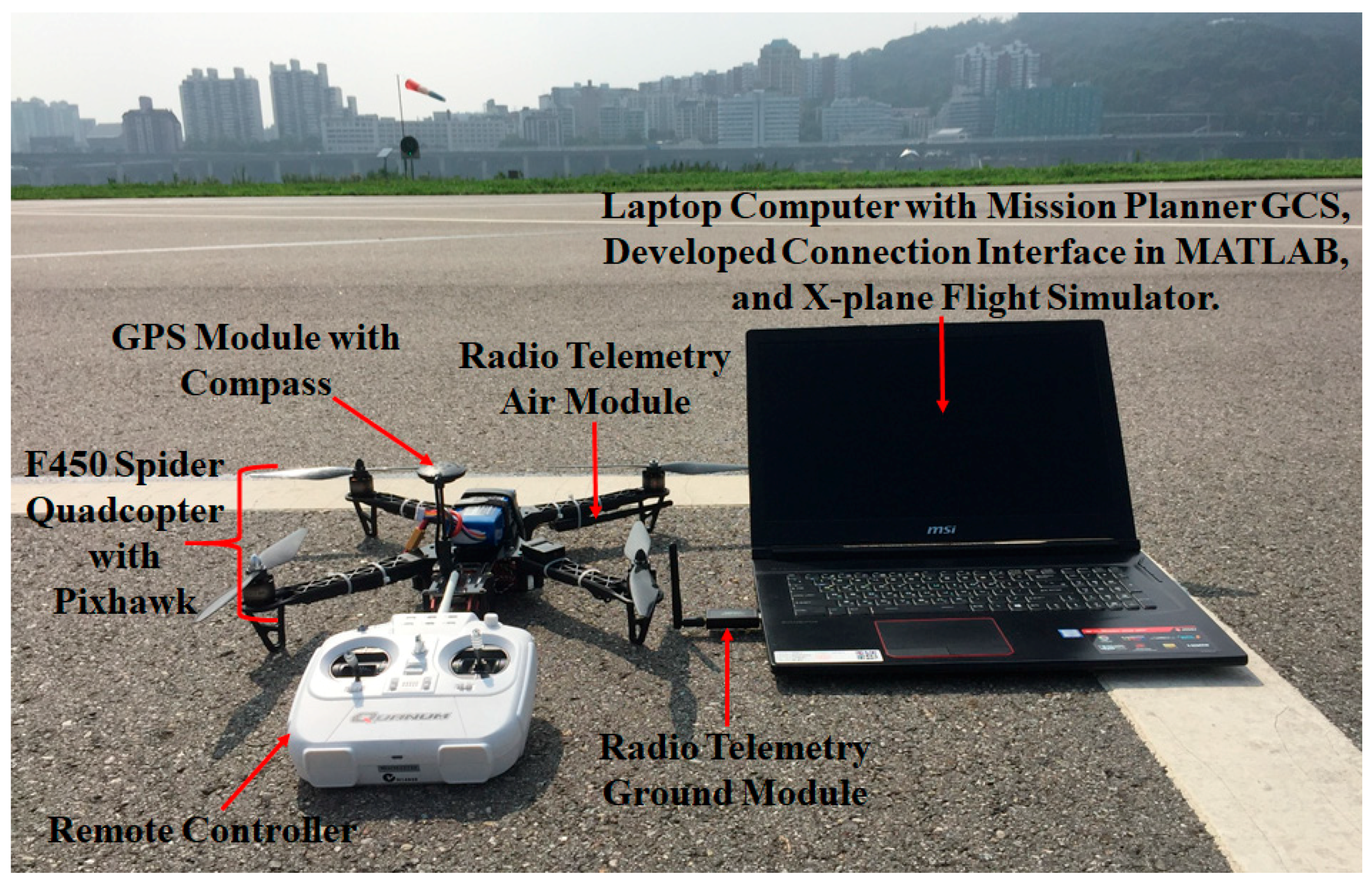
3. Design of Quadcopter and Simulation Environment Setup
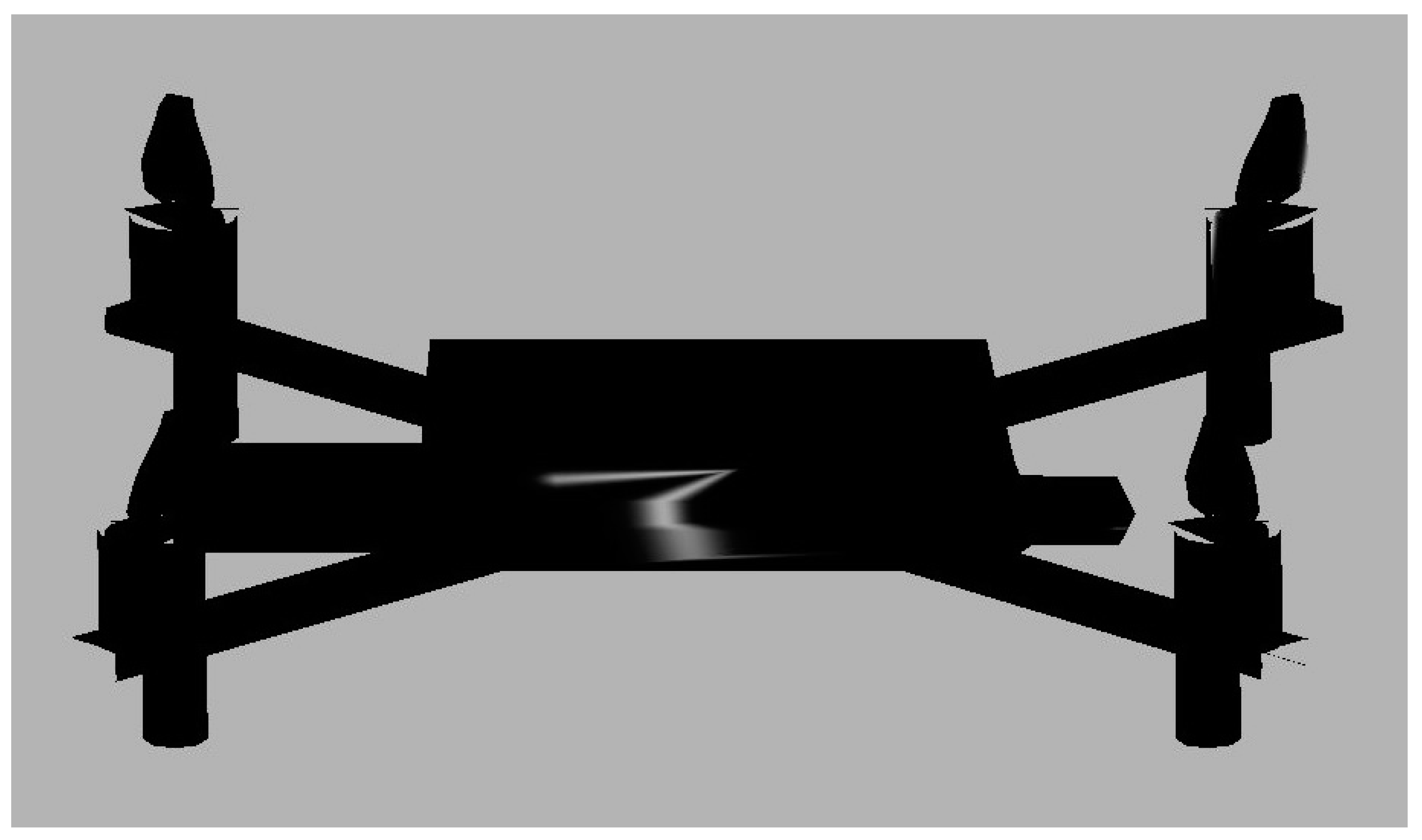
3.1. Design of Virtual Quadcopter
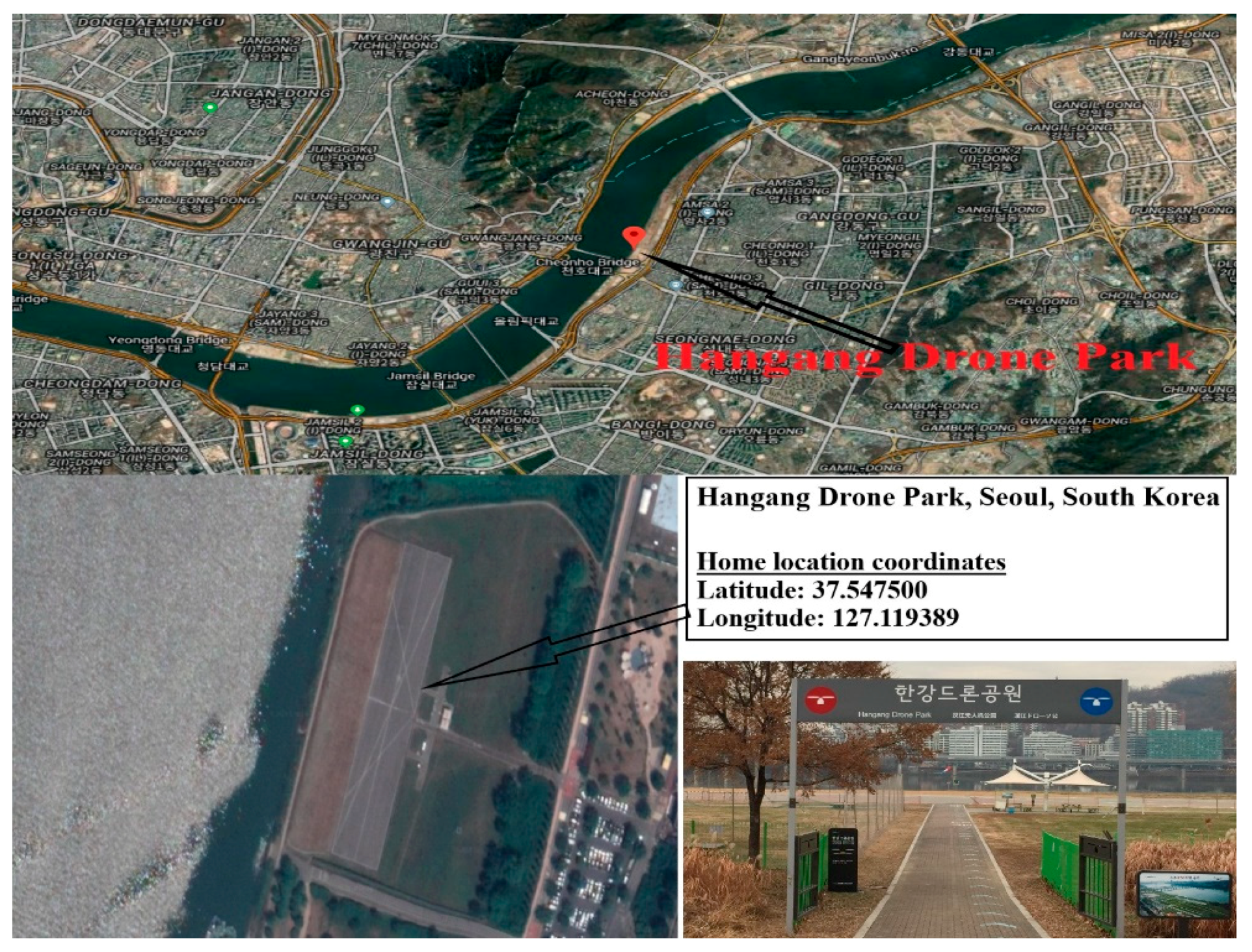
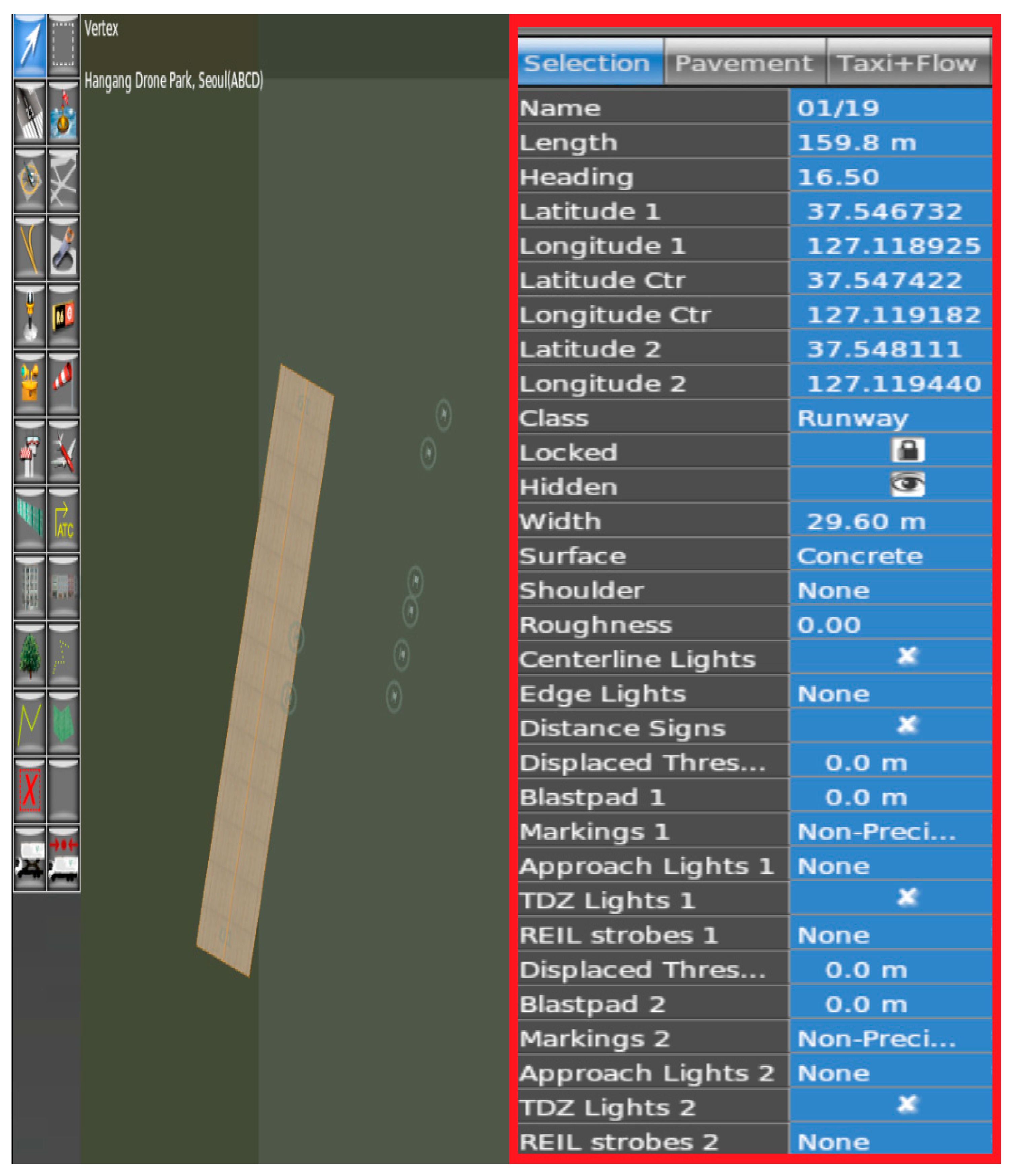
3.2. Design of the Simulation Environment (Virtual Location)
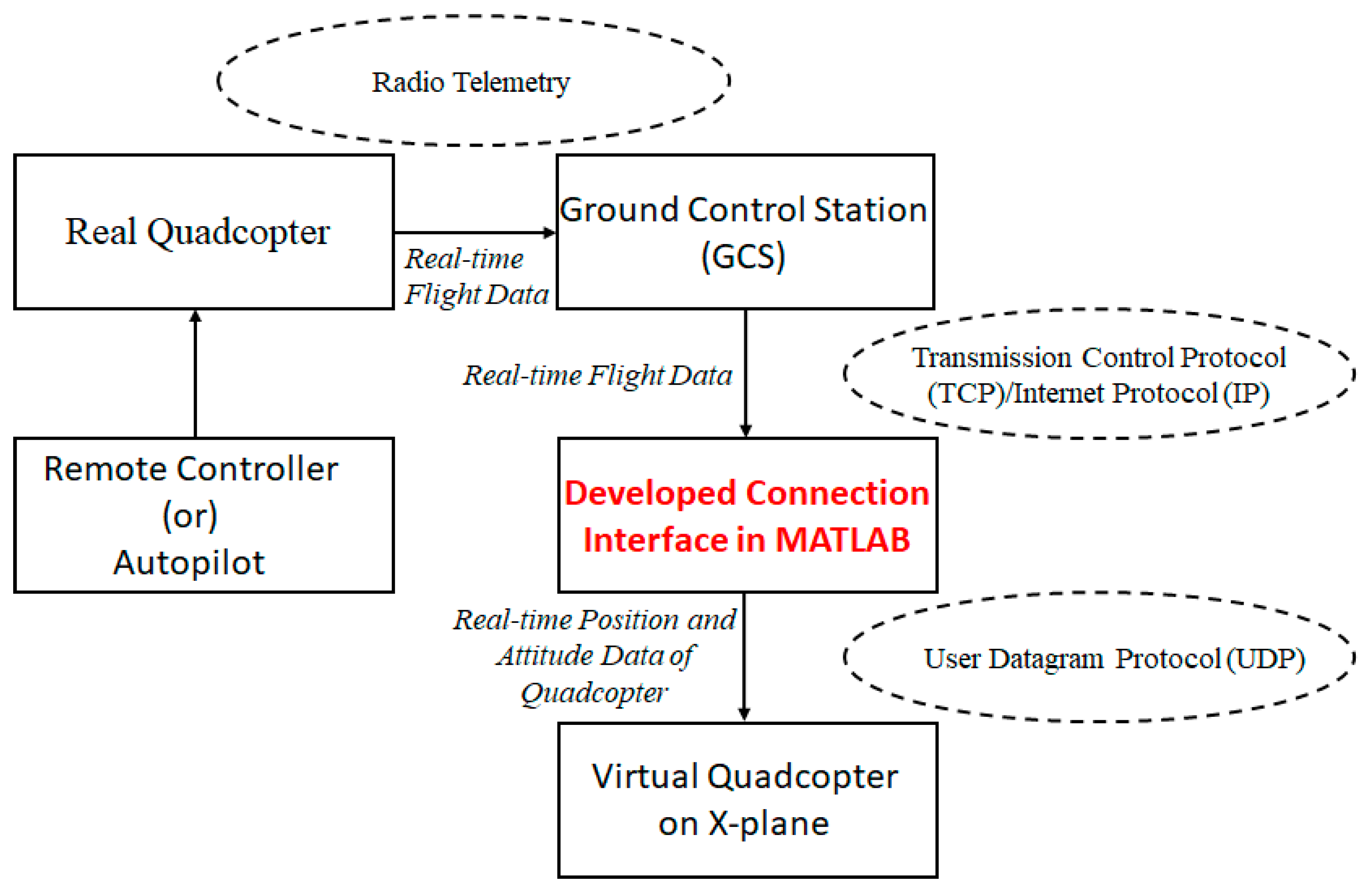
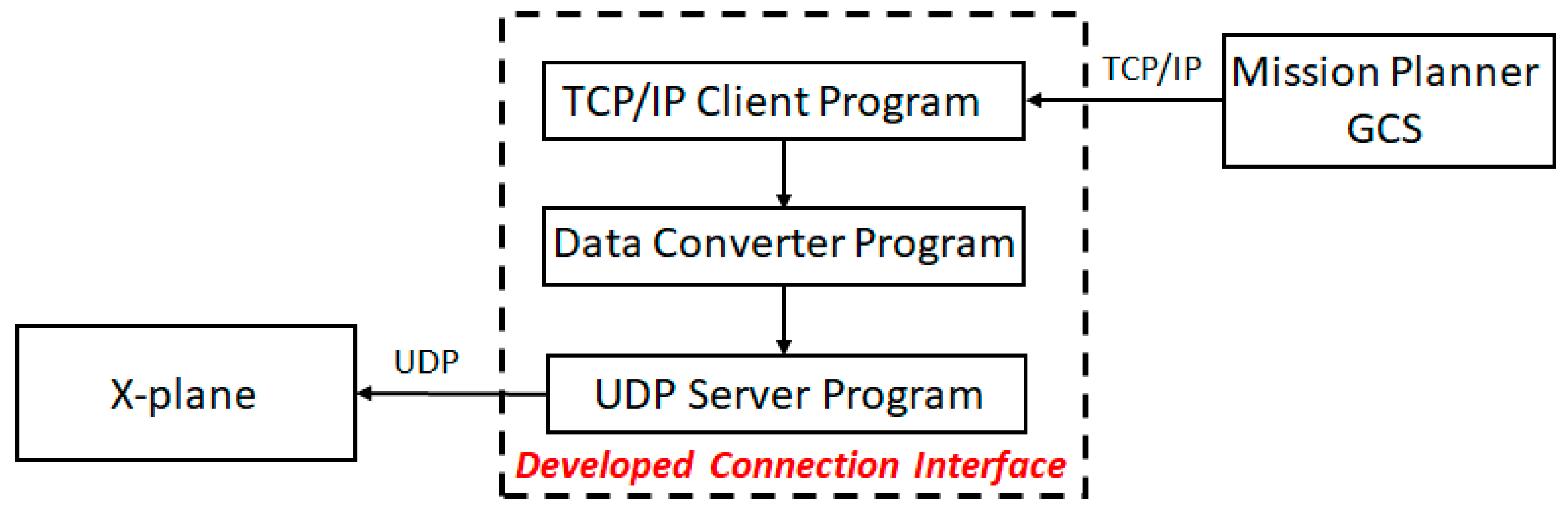
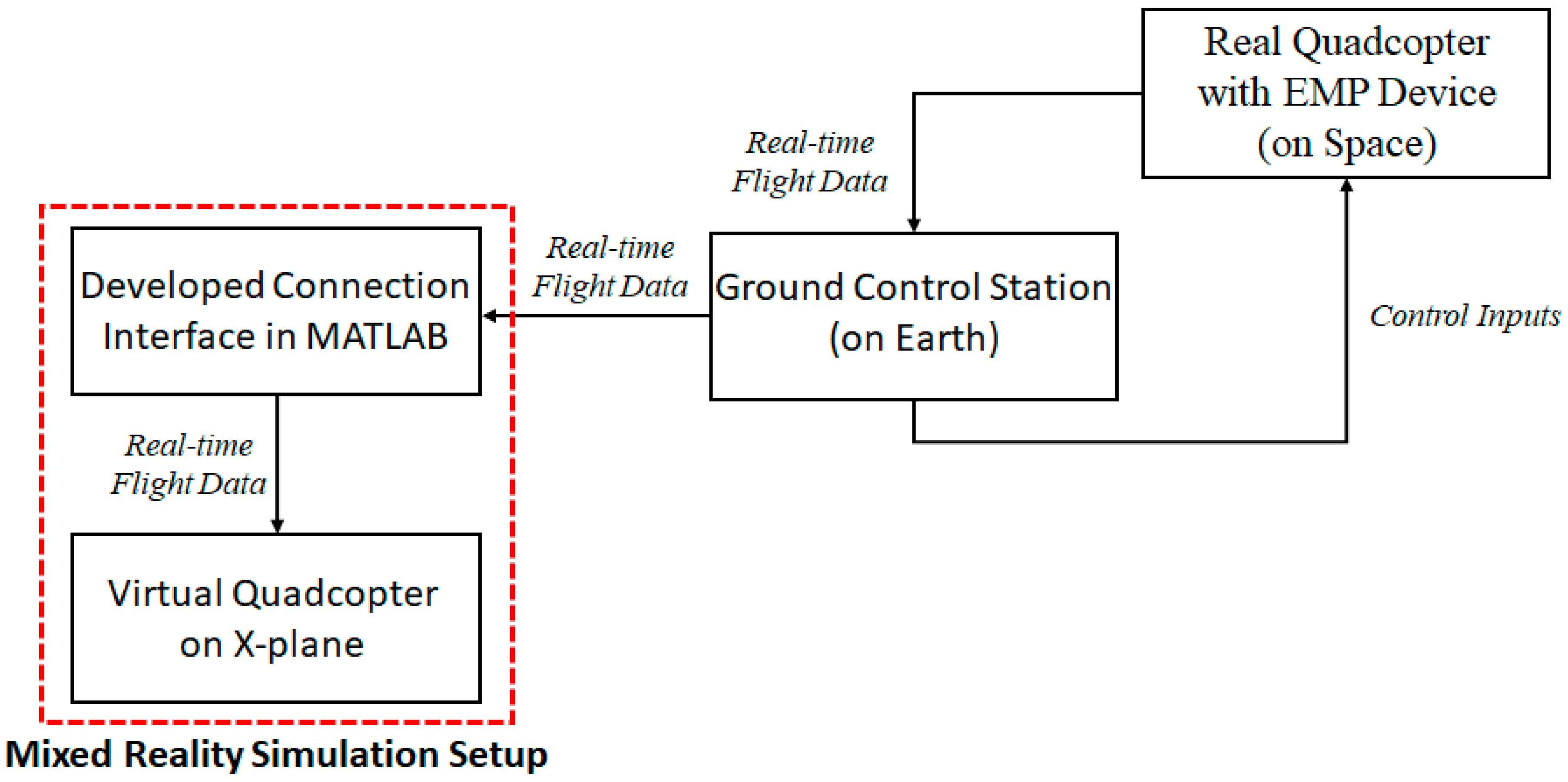
4. Interface between the Real and Virtual Quadcopters (Mixed Reality Simulation Setup)
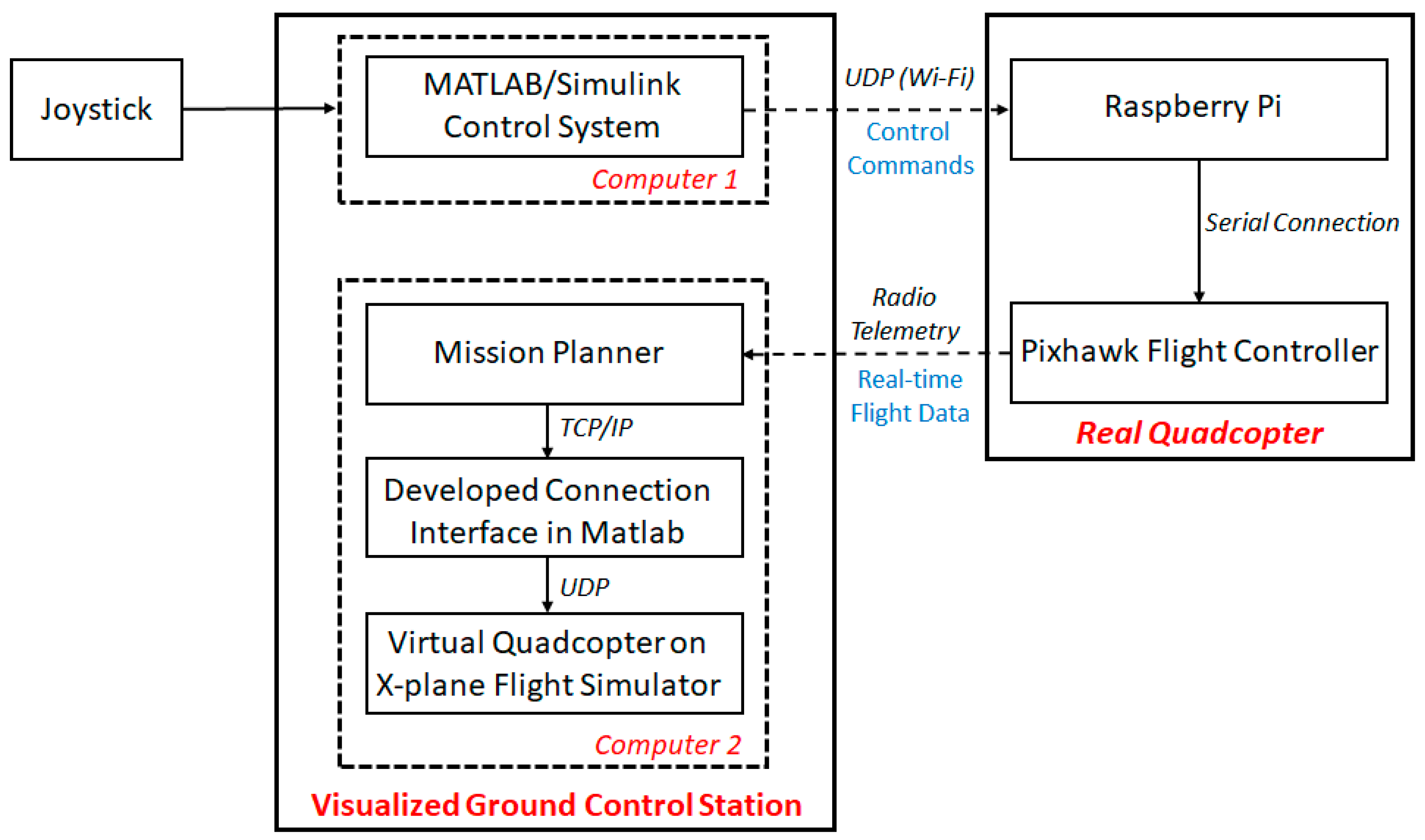
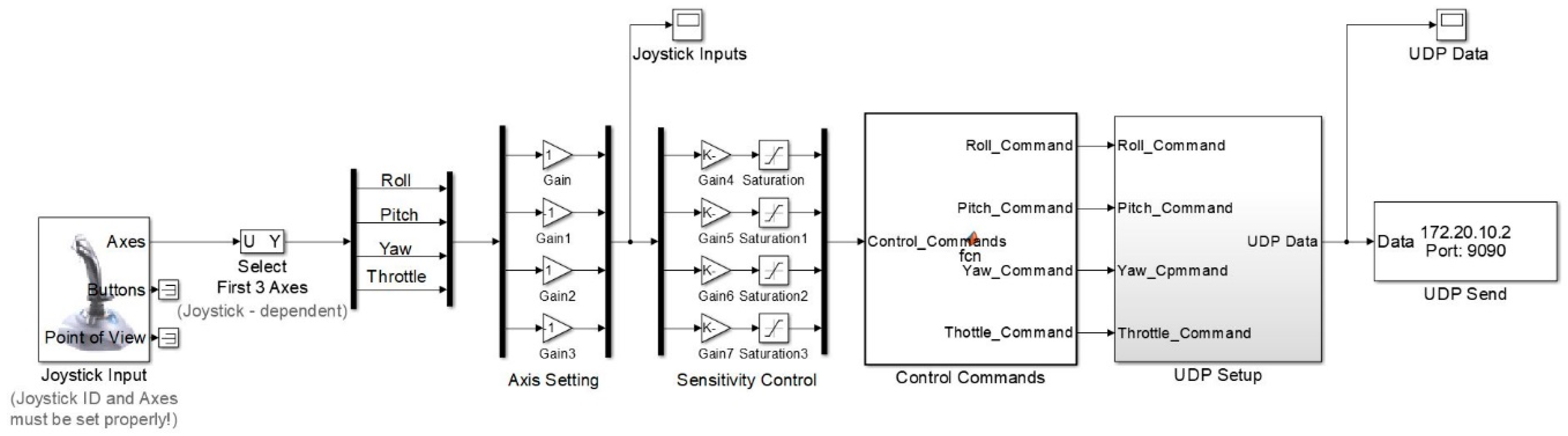
5. Visualized Ground Control Station for Quadcopter Using Mixed Reality Simulation
6. Design of the Quadcopter with Dual-Head Electromagnetic Propulsion Devices
Mixed Reality Simulation with Dual-Head EMP Devices to Control the Quadcopter in Space
7. Results and Discussion
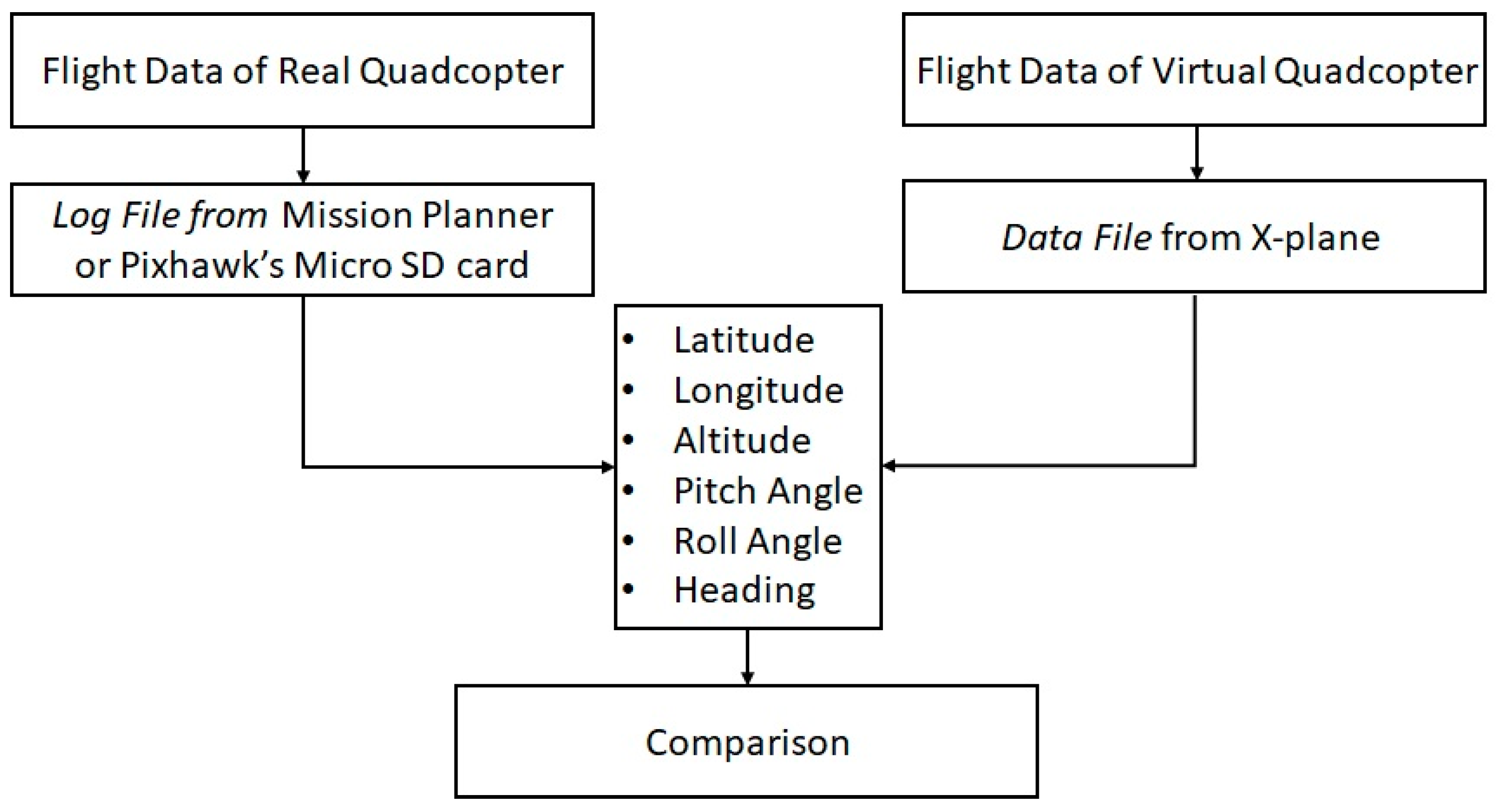
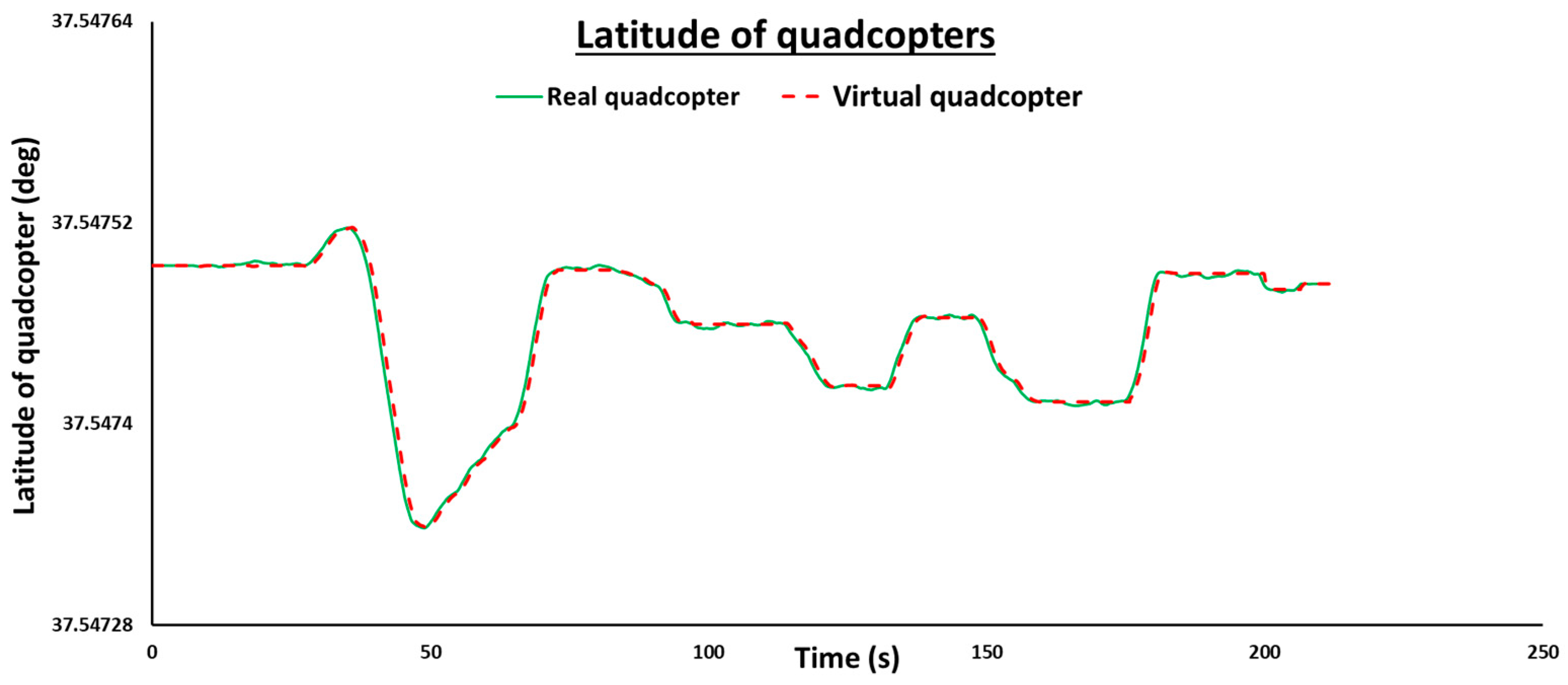
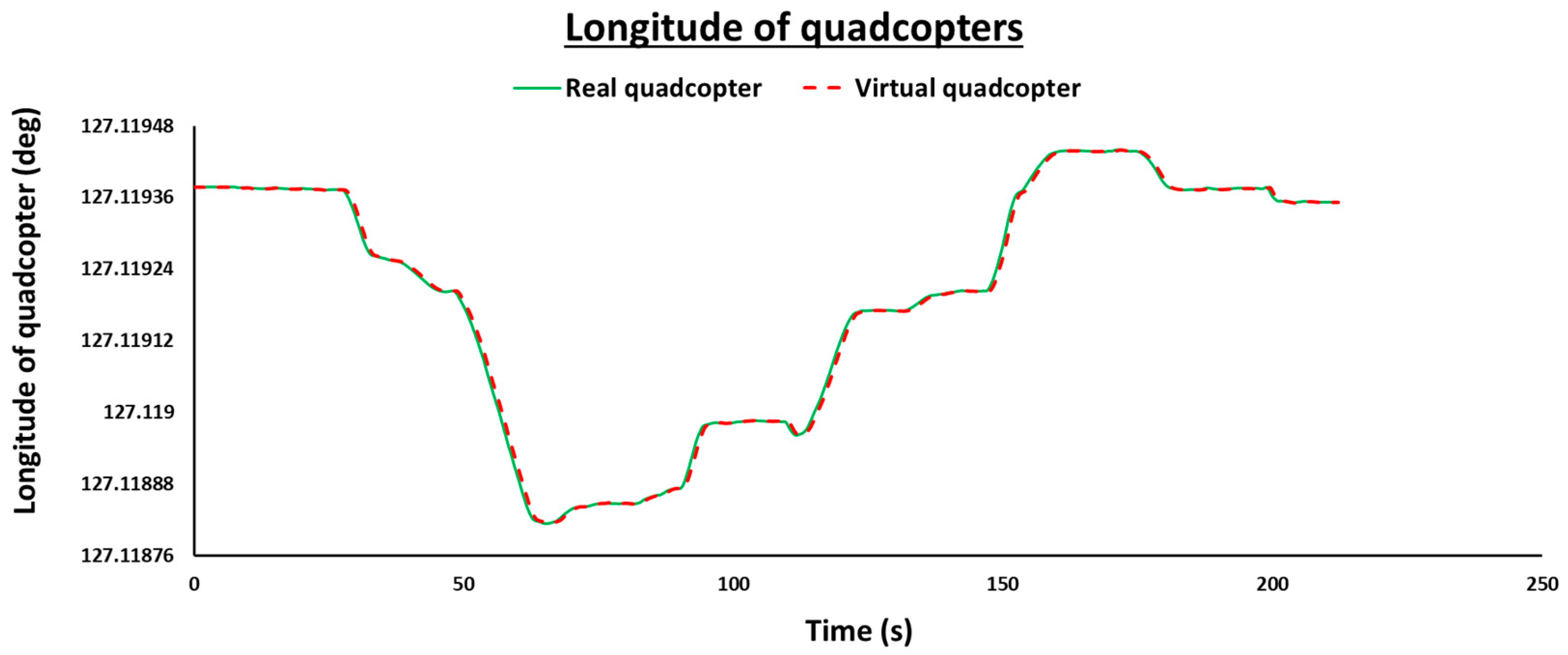
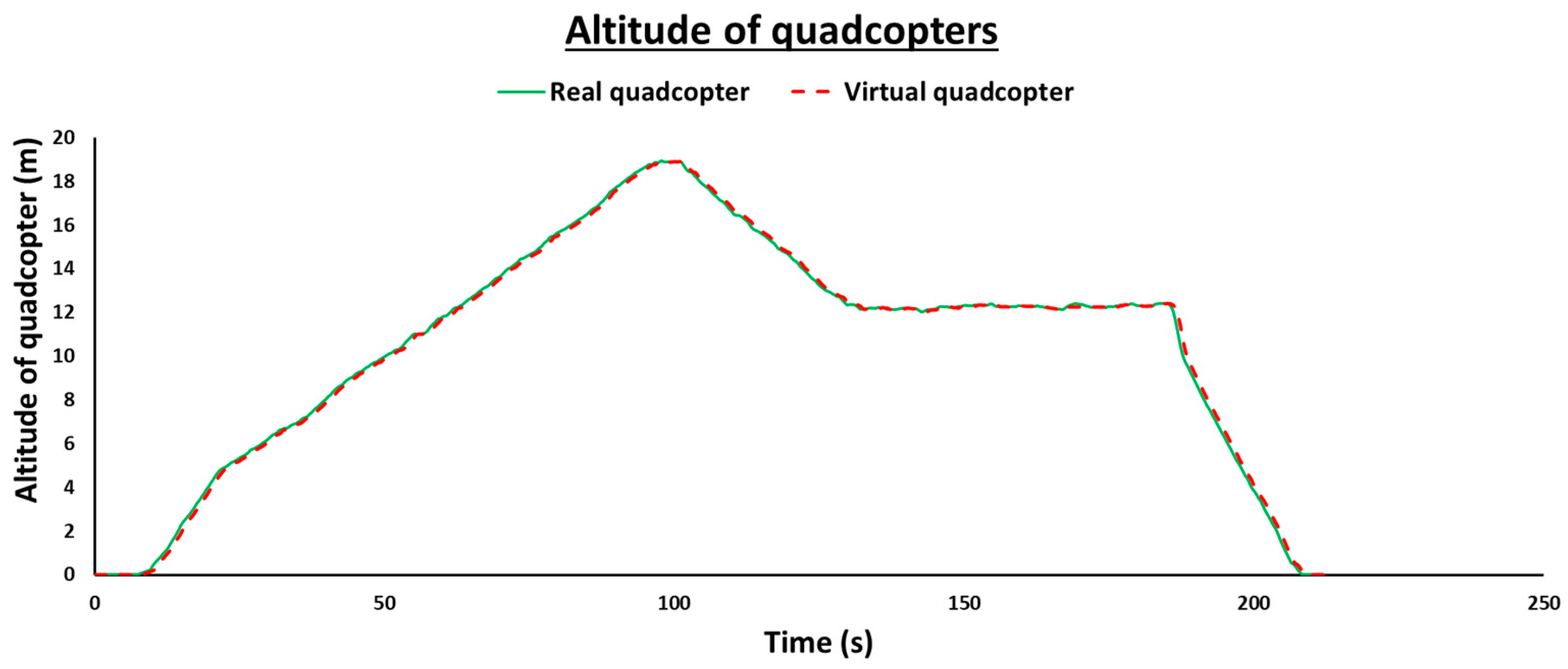
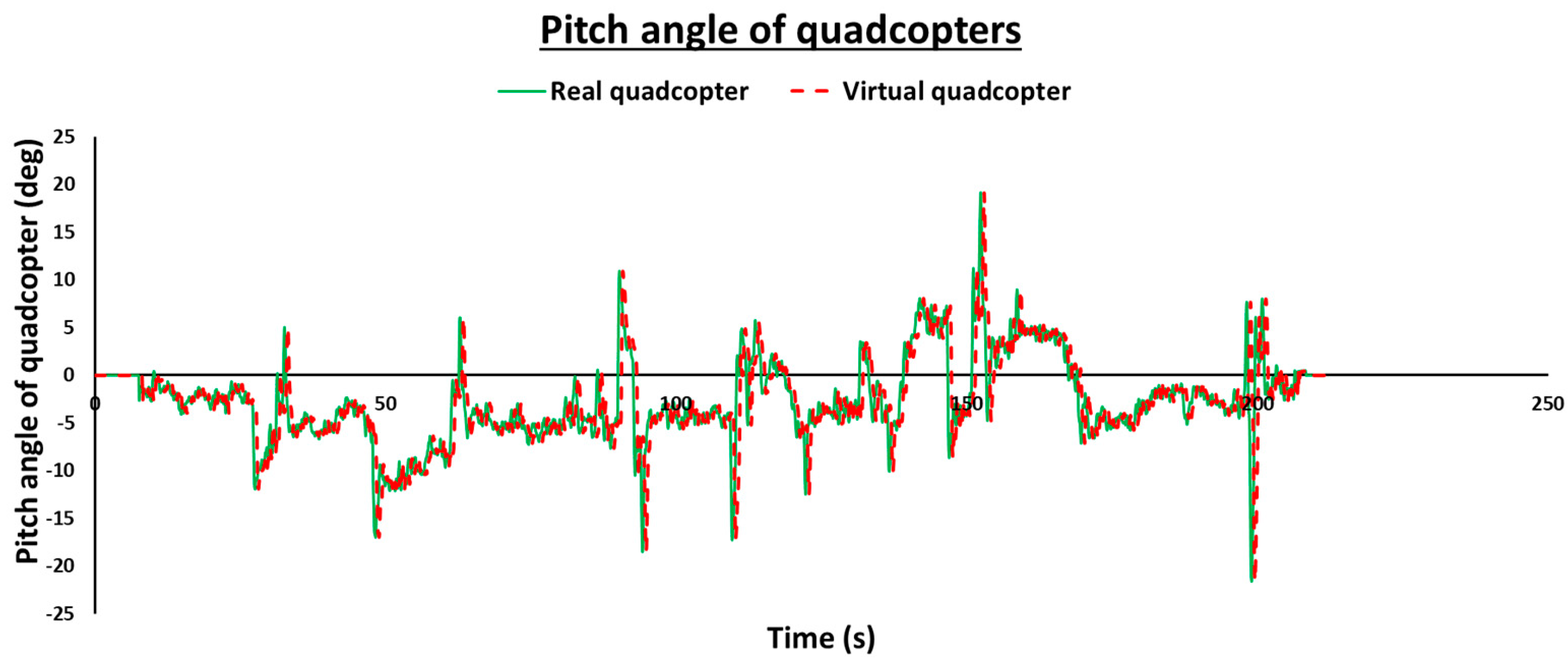
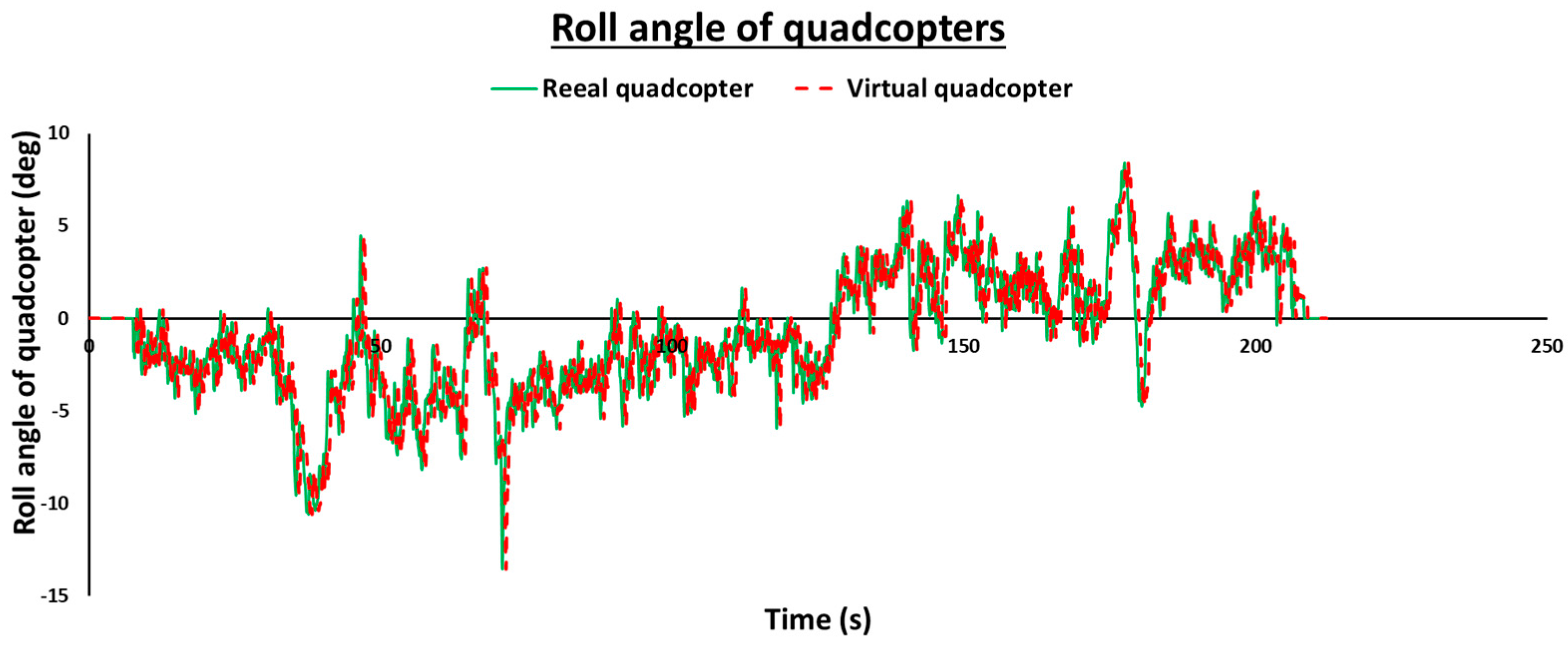
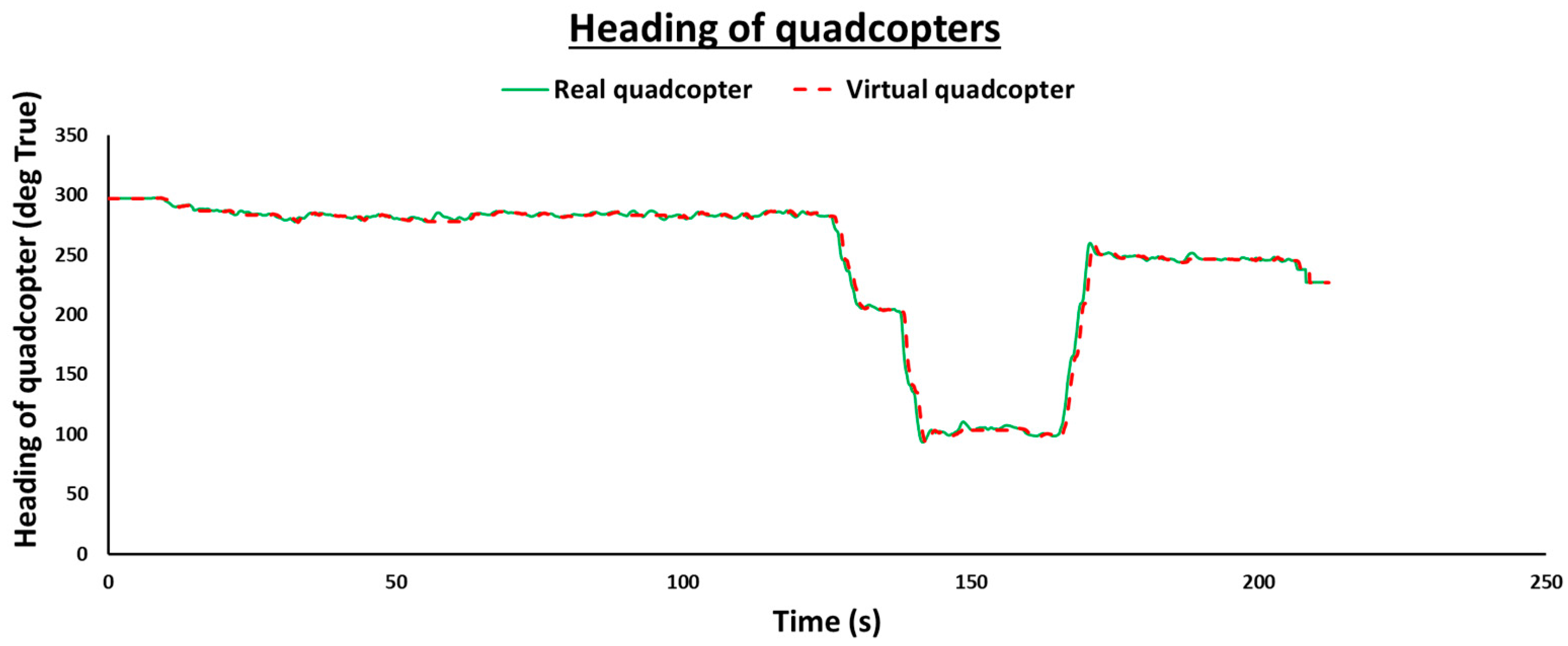
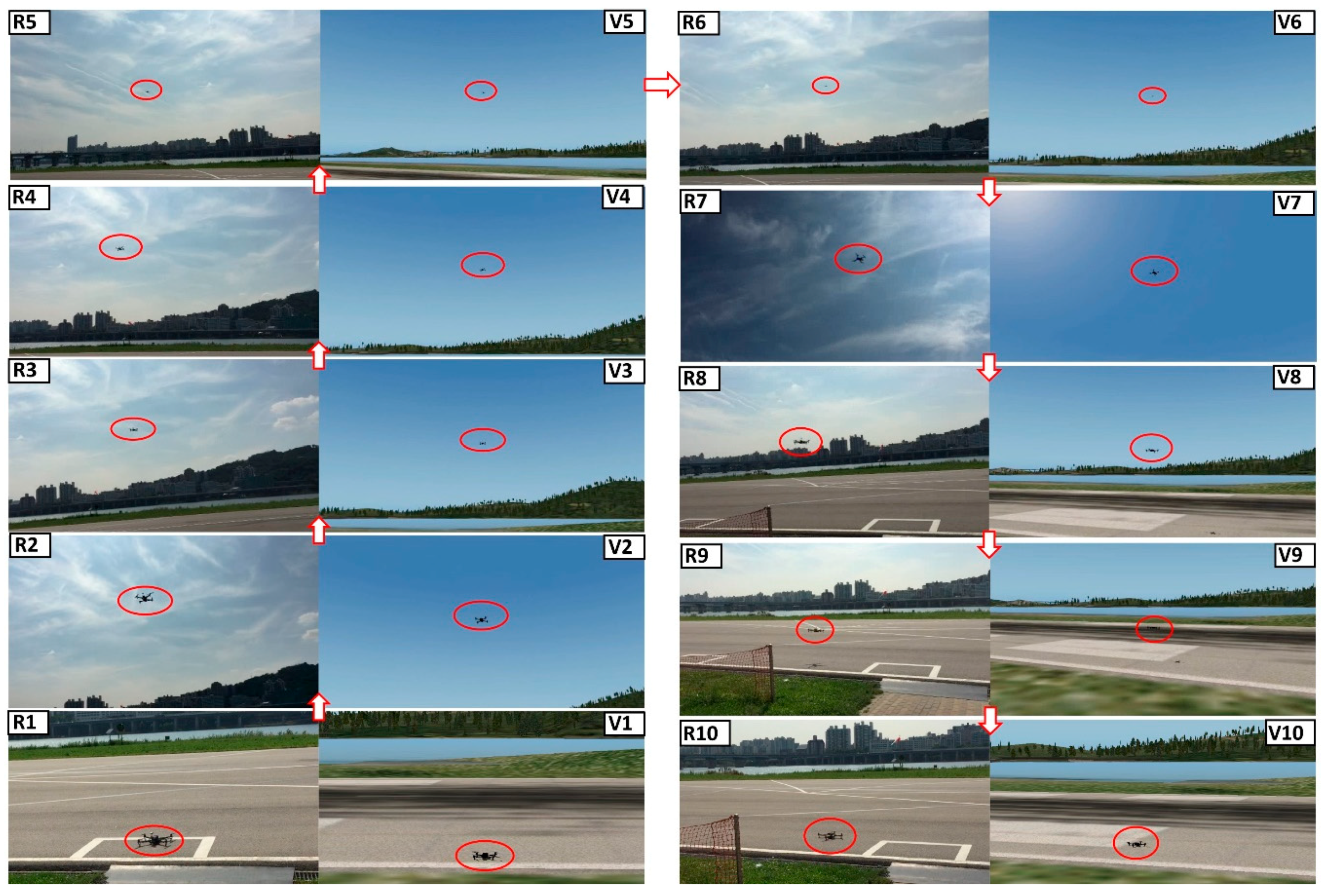
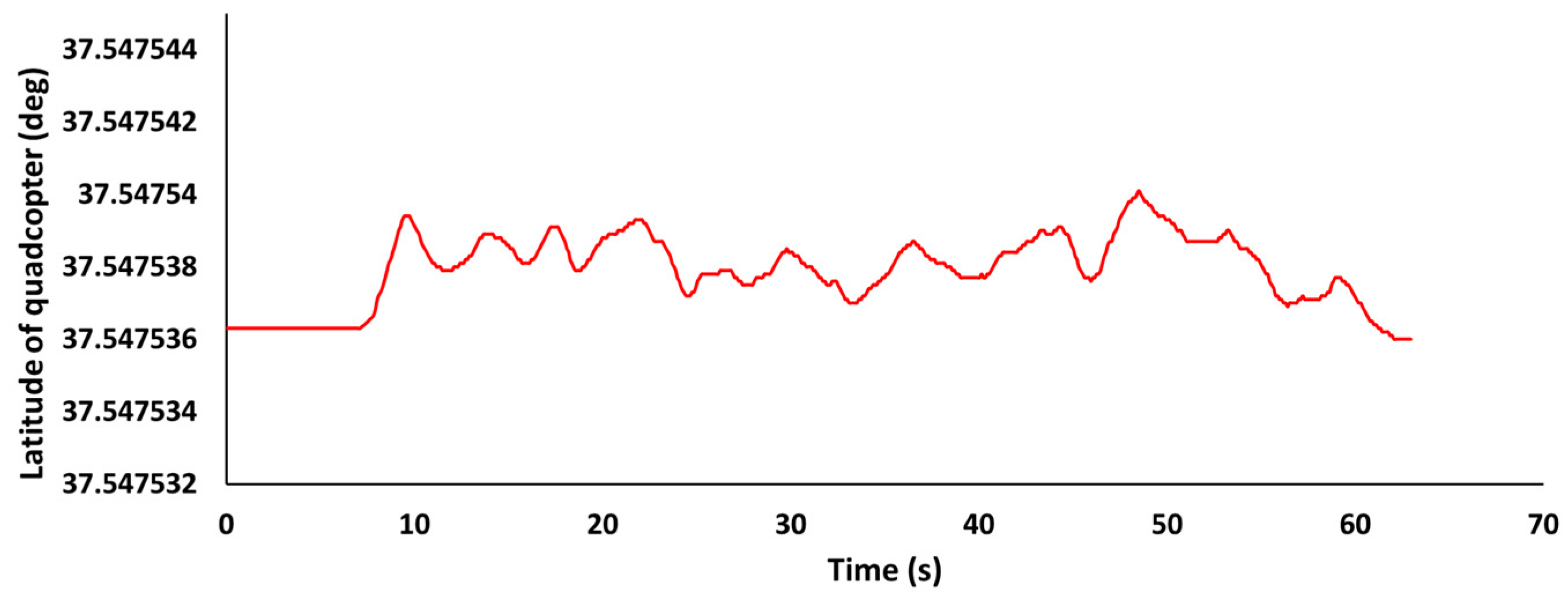
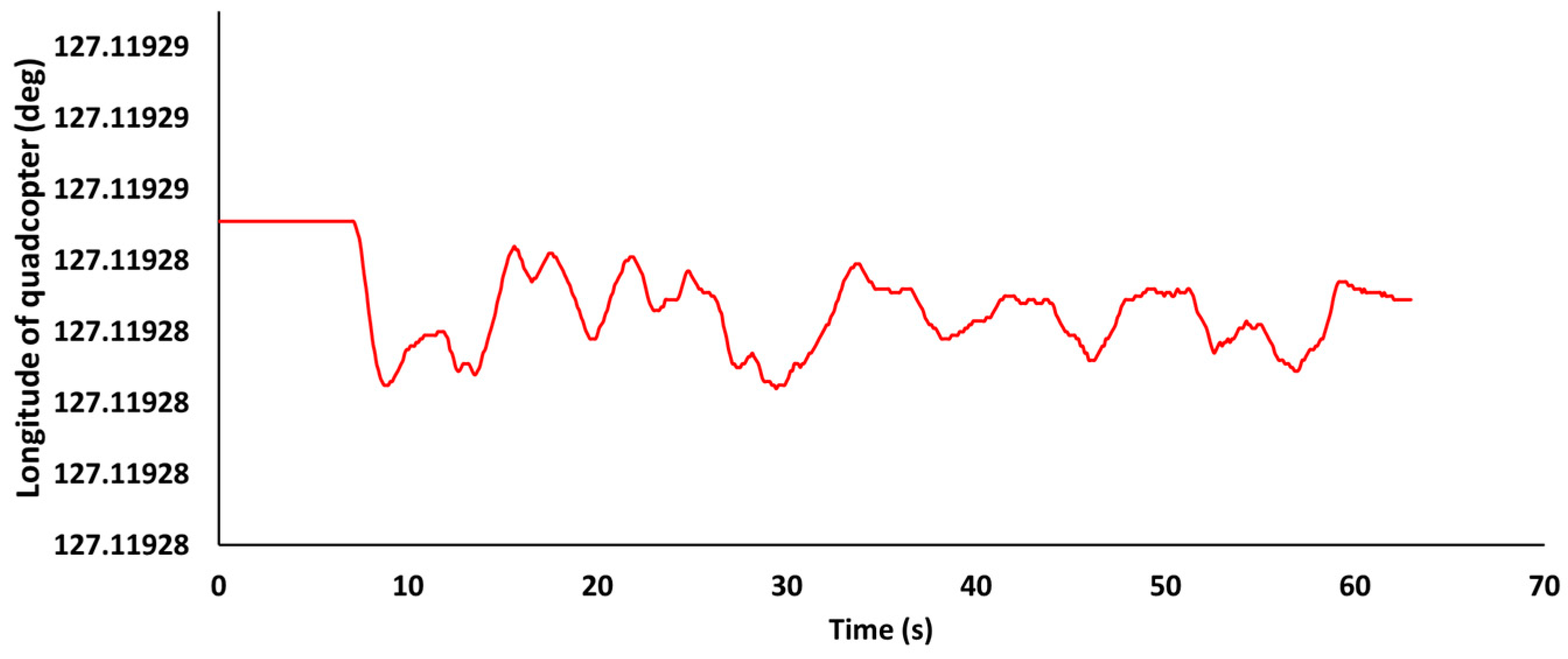
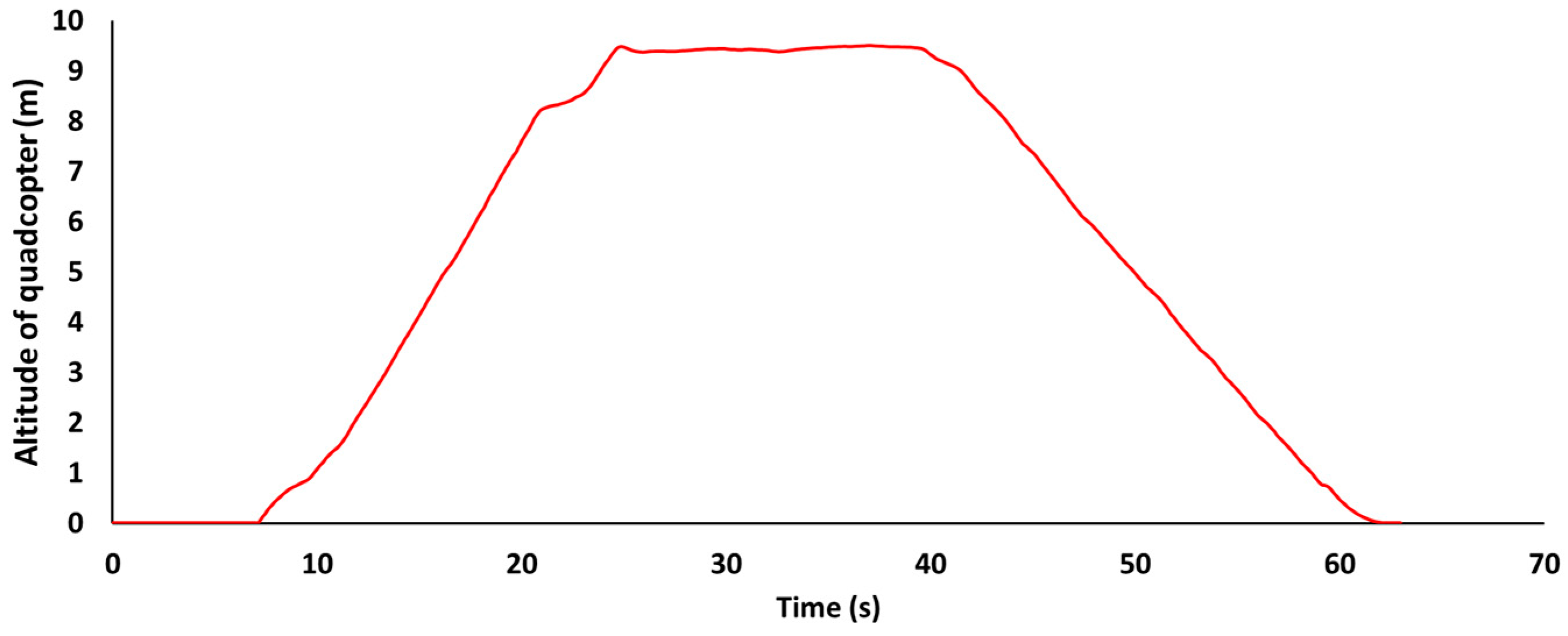
7.1. Validation of Mixed Reality Simulation
7.2. Validation of Visualized Ground Control Station
7.3. Validation of the Quadcopter with Electromagnetic Propulsion Devices
8. Conclusions and Future Work
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Alkamachi, A.; Erçelebi, E. A proportional derivative sliding mode control for an overactuated quadcopter. Proc. Inst. Mech. Eng. J. Part G Aerosp. Eng. 2018, 233, 1354–1363. [Google Scholar] [CrossRef]
- Kumar, A.; Yoon, S. Development of fast and soft landing system for quadcopter drone using fuzzy logic technology. Int. J. Adv. Trends Comput. Sci. Eng. 2019, 9, 624–629. [Google Scholar] [CrossRef]
- Lee, K.; Kim, Y.; Hong, Y. Real-time swarm search method for real-world quadcopter drones. Appl. Sci. 2018, 8, 1169. [Google Scholar] [CrossRef] [Green Version]
- Hassanalian, M.; Rice, D.; Abdelkefi, A. Evolution of space drones for planetary exploration: A review. Prog. Aerosp. Sci. 2018, 97, 61–105. [Google Scholar] [CrossRef]
- Lemke, L.G.; Heldmann, J.L.; Young, L.A.; Gonzales, A.A.; Gulick, V.C.; Foch, R.E.; Marinova, M.M.; Gundlach, J.F. Vertical takeoff and landing UAVS for exploration of recurring hydrological events. In Proceedings of the Concepts and Approaches for Mars Exploration, Houston, TX, USA, 12–14 June 2012. [Google Scholar]
- Colozza, A. Overview of innovative aircraft power and propulsion systems and their applications for planetary exploration. In Proceedings of the International Air and Space Symposium and Exposition cosponsored by the American Institute of Aeronautics and Astronautics, Dayton, OH, USA, 14–17 July 2003. [Google Scholar]
- Rabah, M.; Rohan, A.; Talha, M.; Nam, K.; Kim, S.H. Autonomous vision-based target detection and safe landing for UAV. Int. J. Control Autom. Syst. 2018, 16, 3013–3025. [Google Scholar] [CrossRef]
- Meier, L.; Tanskanen, P.; Fraundorfer, F.; Pollefeys, M. PIXHAWK: A system for autonomous flight using onboard computer vision. In Proceedings of the IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 2992–2997. [Google Scholar]
- Nguyen, K.D.; Ha, C. Development of hardware-in-the-loop simulation based on Gazebo and Pixhawk for unmanned aerial vehicles. Int. J. Aeronaut. Space Sci. 2018, 19, 238–249. [Google Scholar] [CrossRef]
- Lyu, X.; Gu, H.; Zhou, J.; Li, Z.; Shen, S.; Zhang, F. Simulation and flight experiments of a quadrotor tail-sitter vertical take-off and landing unmanned aerial vehicle with wide flight envelope. Int. J. Micro Air Veh. 2018, 10, 303–317. [Google Scholar] [CrossRef] [Green Version]
- Liu, D.; Hou, Z.; Gao, X. Flight modeling and simulation for dynamic soaring with small unmanned air vehicles. Proc. Inst. Mech. Eng. J. Part G Aerosp. Eng. 2016, 231, 589–605. [Google Scholar] [CrossRef]
- Susini, A. A technocritical review of drones crash risk probabilistic consequences and its societal acceptance. In Proceedings of the Risk Information Management, Risk Models, and Applications (RIMMA) Conference, Berlin, Germay, 17–18 November 2014; pp. 27–38. [Google Scholar]
- Asim, M.; Ehsan, D.R.N.; Rafique, K. Probable causal factors in UAV accidents based on human factor analysis and classification system. In Proceedings of the 27th Congress of the International Council of the Aeronautical Sciences, Nice, France, 19–24 September 2010; pp. 4881–4886. [Google Scholar]
- Williams Kevin, W. A Summary of Unmanned Aircraft Accident/Incident Data: Human Factors Implications; Final Report; U.S. Department of Transportation (FAA): Washington, DC, USA, 2004. [Google Scholar]
- Kumar, A.; Mondon, C.; Yoon, S. Development of mixed reality simulation based on an unmanned aerial vehicle. In Proceedings of the CHIRA 2019 3rd International Conference on Computer-Human Interaction Research and Applications, Vienna, Austria, 20–21 September 2019; pp. 89–96. [Google Scholar]
- Kumar, A. Mixed Reality Simulation Based on an Unmanned Aerial Vehicle and X-Plane Flight Simulator. Korea Patent 1,615,010,612, 23 December 2019. [Google Scholar]
- Garcia, R.; Barnes, L. Multi-UAV simulator utilizing X-plane. J. Intell. Robot. Syst. 2010, 57, 393–406. [Google Scholar] [CrossRef]
- Qi, J.; Liu, J.; Zhao, B.; Mei, S.; Han, J.; Shang, H. Visual simulation system design of soft-wing UAV based on FlightGear. In Proceedings of the 2014 IEEE International Conference on Mechatronics and Automation, Tianjin, China, 3–6 August 2014; pp. 1188–1192. [Google Scholar]
- Lugo-Cárdenas, I.; Flores, G.; Lozano, R. The MAV3DSim: A simulation platform for research, education and validation of UAV controllers. In Proceedings of the 19th International Federation of Automatic Control (IFAC) World Congress, Cape Town, South Africa, 24–29 August 2014; pp. 713–717. [Google Scholar]
- Almousa, O.; Prates, J.; Yeslam, N.; Gregor, D.M.; Zhang, J.; Phan, V.; Nielsen, M.; Smith, R.; Qayumi, K. Virtual reality simulation technology for cardiopulmonary resuscitation training: An innovative hybrid system with haptic feedback. Simul. Gaming 2019, 50, 6–22. [Google Scholar] [CrossRef]
- Hsu, K.; Wang, C.; Jiang, J.; Wei, H. Development of a real-time detection system for augmented reality driving. Math. Probl. Eng. 2015, 2015. [Google Scholar] [CrossRef]
- Stevens, J.; Kincaid, P.; Sottilare, R. Visual modality research in virtual and mixed reality simulation. J. Def. Model. Simul. 2015, 12, 519–537. [Google Scholar] [CrossRef]
- Lan, G.; Sun, J.; Li, C.; Ou, Z.; Luo, Z.; Liang, J.; Hao, Q. Development of UAV based virtual reality systems. In Proceedings of the 2016 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI), Baden-Baden, Germany, 19–21 September 2016; pp. 481–486. [Google Scholar]
- Wang, S.; Chen, J.; Zhang, Z.; Wang, G.; Tan, Y.; Zheng, Y. Construction of a virtual reality platform for UAV deep learning. In Proceedings of the 2017 Chinese Automation Congress (CAC), Jinan, China, 20–22 October 2017; pp. 3912–3916. [Google Scholar]
- Wang, Y.; Huang, W.; Been-Lirn Duh, H. InspectAR: Unmanned aerial vehicle (UAV) with augmented reality (AR) technology. In Proceedings of the SA ‘16 SIGGRAPH ASIA 2016 Mobile Graphics and Interactive Applications, Macau, China, 5–8 November 2016. [Google Scholar] [CrossRef]
- Li, Y.-B.; Kang, S.-P.; Qiao, Z.-H.; Zhu, Q. Development actuality and application of registration technology in augmented reality. In Proceedings of the 2008 International Symposium on Computational Intelligence and Design, Wuhan, China, 17–18 October 2008; pp. 69–74. [Google Scholar]
- Selecký, M.; Jan, F.; Rollo, M. Communication architecture in mixed-reality simulations of unmanned systems. Sensors 2018, 18, 853. [Google Scholar] [CrossRef] [Green Version]
- Peña, F.L.; Deibe, A.; Orjales, F. On the initiation phase of a mixed reality simulator for air pollution monitoring by autonomous UAVs. In Proceedings of the 2017 9th IEEE International Conference on Intelligent Data Acquisition and Advanced Computing Systems: Technology and Applications (IDAACS), Bucharest, Romania, 21–23 September 2017. [Google Scholar] [CrossRef]
- Katragadda, S.; Benedict, A.M.; Deane, A. Stereoscopic mixed reality in unmanned aerial vehicle search and rescue. In Proceedings of the AIAA SciTech Forum, San Diego, CA, USA, 7–11 January 2019. [CrossRef]
- Bai, H.; Atiquzzaman, M.; Ivancic, W. QoS support in ARINC 664 P8 data networks: ATN applications over TCP/IP ground-to-ground subnetworks. J. Aerosp. Comput. Inf. Commun. 2006, 3, 374–387. [Google Scholar] [CrossRef]
- Wei, H.; Tung, Y.; Yu, C. Counteracting UDP flooding attacks in SDN. In Proceedings of the 2016 IEEE NetSoft Conference and Workshops (NetSoft), Seoul, Korea, 6–10 June 2016; pp. 367–371. [Google Scholar]
- Bittar, A.; de Oliveira, N.M.F.; de Figueiredo, H.V. Hardware-in-the-loop simulation with X-Plane of attitude control of a SUAV exploring atmospheric conditions. J. Intell. Robot. Syst. 2014, 73, 271–287. [Google Scholar] [CrossRef]
- Rahman, M.F.A.; Radzuan, S.M.; Hussain, Z.; Khyasudeen, M.F.; Ahmad, K.A.; Ahmad, F.; Ani, A.I.C. Performance of loiter and auto navigation for quadcopter in mission planning application using open source platform. In Proceedings of the 2017 7th IEEE International Conference on Control System, Computing and Engineering (ICCSCE), Penang, Malaysia, 24–26 November 2017; pp. 342–347. [Google Scholar]
- Park, B.; Lee, J.; Kim, Y.; Yun, H.; Kee, C. DGPS enhancement to GPS NMEA output data: DGPS by correction projection to position-domain. J. Navig. 2013, 66, 249–264. [Google Scholar] [CrossRef] [Green Version]
- Available online: https://dronekit-python.readthedocs.io/en/latest/about/index.html (accessed on 14 May 2020).
- Kumar, V.R.S.; Mariappan, A.; Sukumaran, A.; Lal, V.K.V.; John, J.; Kumar, A.; Yoon, S.; Rajeev, J. Design of an Uninterrupted Propulsion System for Spinning Planet Landers for Soft Landing. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019. [Google Scholar] [CrossRef]
- Mariappan, A.; Sukumaran, A.; Thianesh, U.K.; Sankar, P.G.; Kumar, A.; Yoon, S.; Kumar, V.R.S. Design of Planet Landers for Soft Landing with DHEM Propulsion System—Phase I. In Proceedings of the AIAA Propulsion and Energy 2019 Forum, Indianapolis, IN, USA, 19–22 August 2019. [Google Scholar] [CrossRef]
- Kumar, A.; Yoon, S.; Amrith, M.; Thianesh, U.K.; Kumar, V.R.S. Mixed reality simulation of a quadcopter with a DHEM device for planet landers for soft landing—A review. Int. J. Adv. Sci. Technol. 2019, 28, 157–171. [Google Scholar]
- Kumar, V.R.S.; Mariappan, A.; Thianesh, U.K.; Sukumaran, A.; Kumar, A.; Lal, V.K.V.; John, J. The Invention of an Electromagnetic Propulsion System for Drones and Plant Landers with an Unrestricted Flight Endurance. Nature 2020, in press. [Google Scholar]
- Kumar, V.R.S.; Lal, V.K.V.; Mariappan, A.; Sukumaran, A.; Kumar, A.; John, J.; Thianesh, U.K. Dual-Head Electromagnetic Propulsion and Energy Conversion System for Planet Landers and Other Various Industrial Application. India Patent 201,841,049,585, 28 December 2018. [Google Scholar]
- Kumar, V.R.S. Design and Testing of Dual-Head Electromagnetic Propulsion System for Spinning Venus Impact Probe; ISRO Space Based Experiments to Study Venus—A Proposal; No. VRS/KCT/ISRO/VIP-P1; ISRO Space Science Programme Office, ISRO HQ, Antariksh Bhavan: Bangalore, India, 2017. [Google Scholar]
- Floreano, D.; Robert, J.W. Science, technology and the future of small autonomous drones. Nature 2015, 521, 460–466. [Google Scholar] [CrossRef] [PubMed] [Green Version]



































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Quadcopter Specifications | Model/Values |
|---|---|
| Flight controller | Pixhawk 2.4.8 |
| Total mass (including battery) | 2 kg |
| Frame diagonal length | 450 mm |
| Propellers dimension and pitch | 10 × 3.8 |
| No of blade | 2 |
| Motor (brushless) | 2212–920 KV |
| Motor turn rate | 4000–9000 RPM |
| Radio telemetry | 433 MHZ |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kumar, A.; Yoon, S.; Kumar, V.R.S. Mixed Reality Simulation of High-Endurance Unmanned Aerial Vehicle with Dual-Head Electromagnetic Propulsion Devices for Earth and Other Planetary Explorations. Appl. Sci. 2020, 10, 3736. https://doi.org/10.3390/app10113736
Kumar A, Yoon S, Kumar VRS. Mixed Reality Simulation of High-Endurance Unmanned Aerial Vehicle with Dual-Head Electromagnetic Propulsion Devices for Earth and Other Planetary Explorations. Applied Sciences. 2020; 10(11):3736. https://doi.org/10.3390/app10113736
Chicago/Turabian StyleKumar, Ashish, Sugjoon Yoon, and V.R.Sanal Kumar. 2020. "Mixed Reality Simulation of High-Endurance Unmanned Aerial Vehicle with Dual-Head Electromagnetic Propulsion Devices for Earth and Other Planetary Explorations" Applied Sciences 10, no. 11: 3736. https://doi.org/10.3390/app10113736
APA StyleKumar, A., Yoon, S., & Kumar, V. R. S. (2020). Mixed Reality Simulation of High-Endurance Unmanned Aerial Vehicle with Dual-Head Electromagnetic Propulsion Devices for Earth and Other Planetary Explorations. Applied Sciences, 10(11), 3736. https://doi.org/10.3390/app10113736