Development of a Simulation Model for HMT of a 50 kW Class Agricultural Tractor

 ,
,  ,
,  ,
,
Abstract
:1. Introduction
2. Materials and Methods
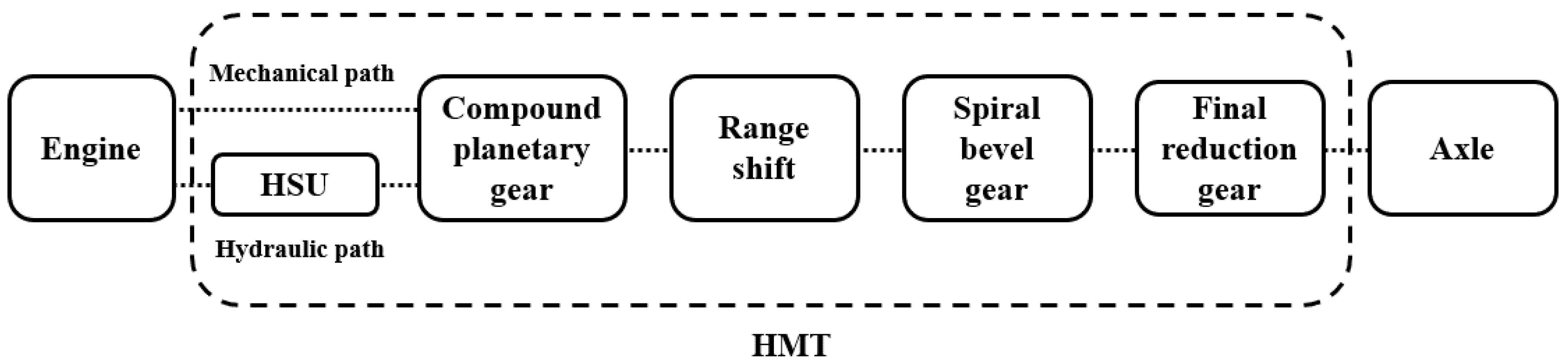
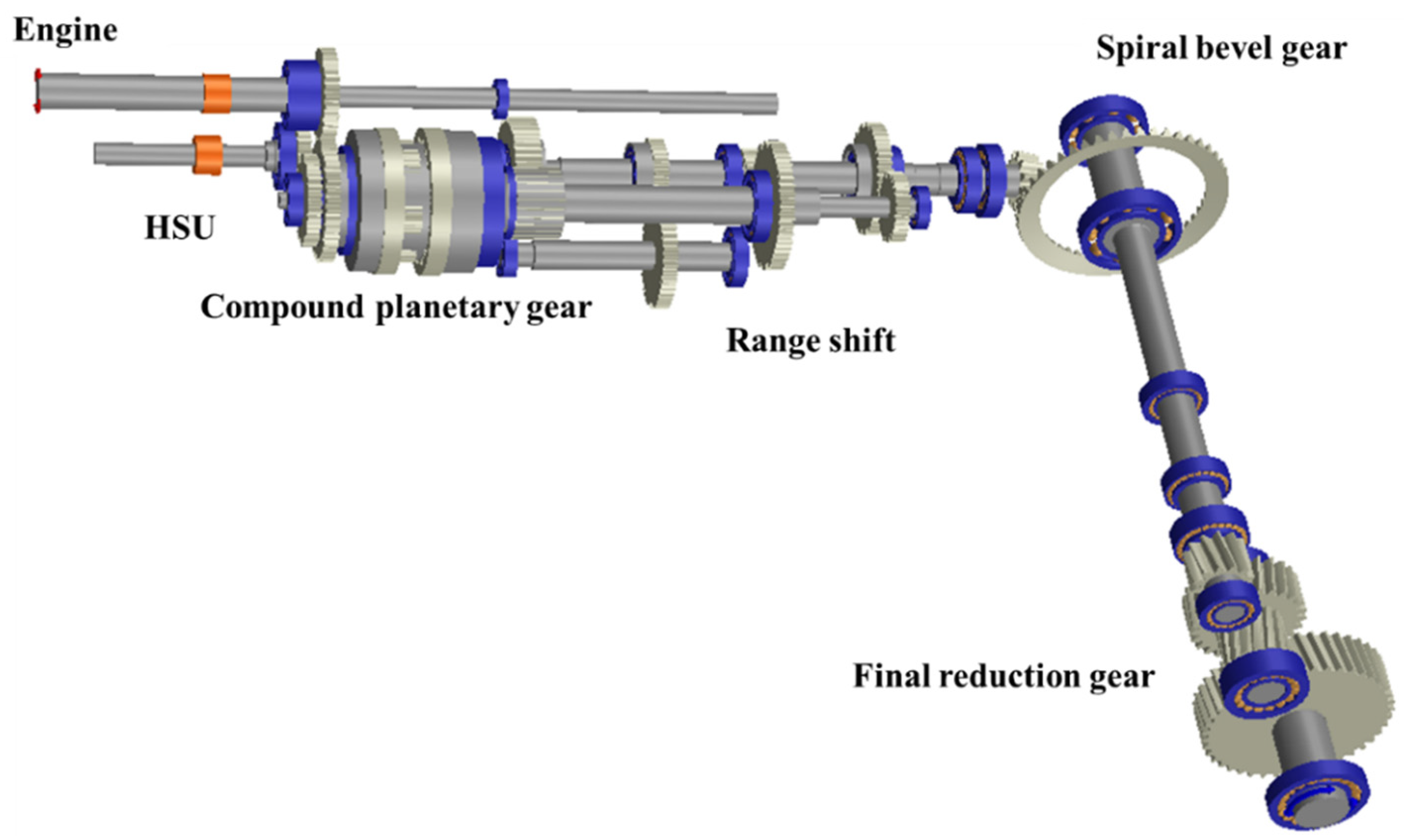
2.1. Powertrain Configurations
2.2. Hydrostatic Circuit
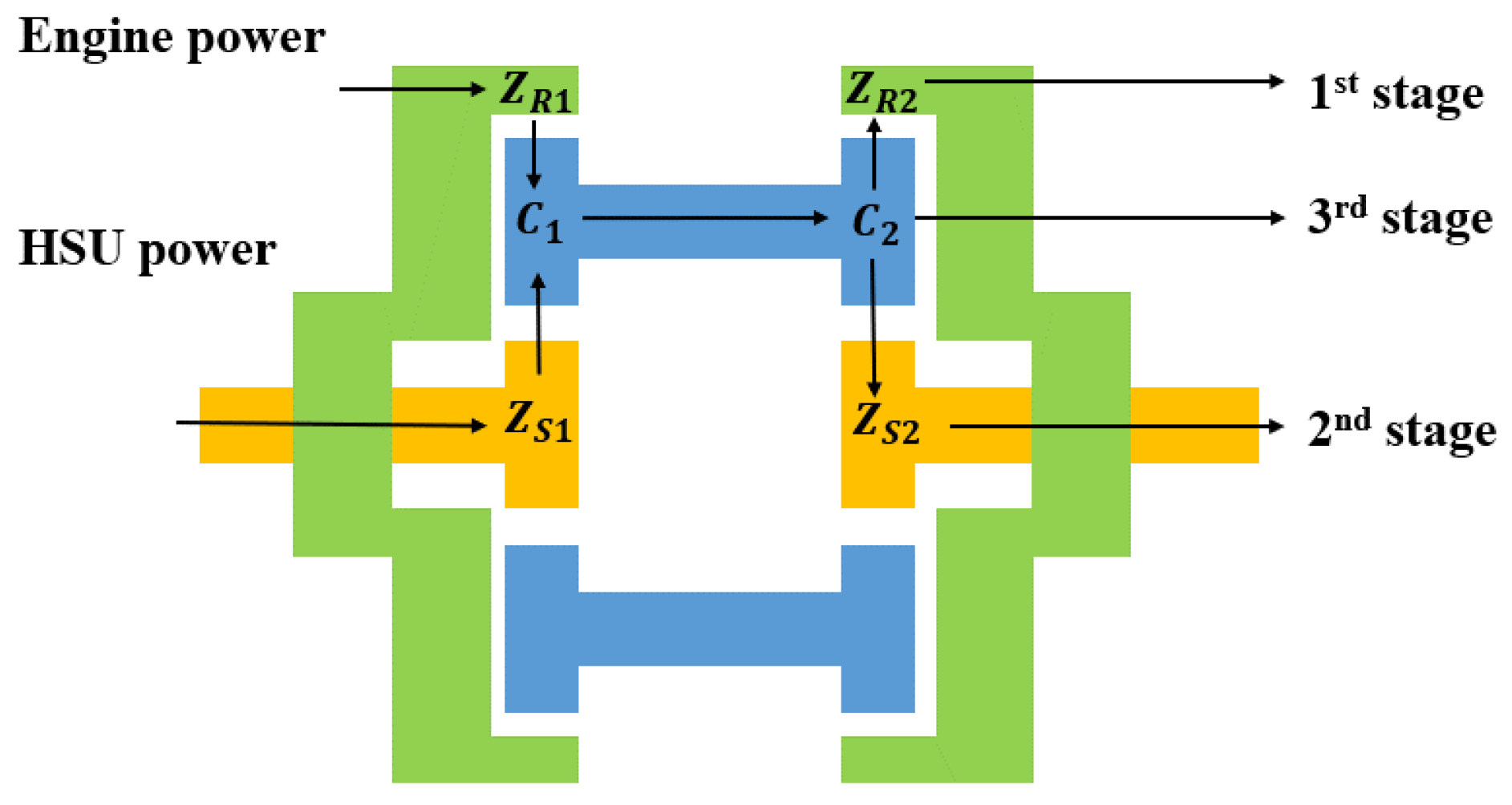
2.3. Compound Planetary Gear
2.4. Simulation Model
2.5. Performance Evaluation
2.6. Analysis Method
3. Results
3.1. Load Analysis
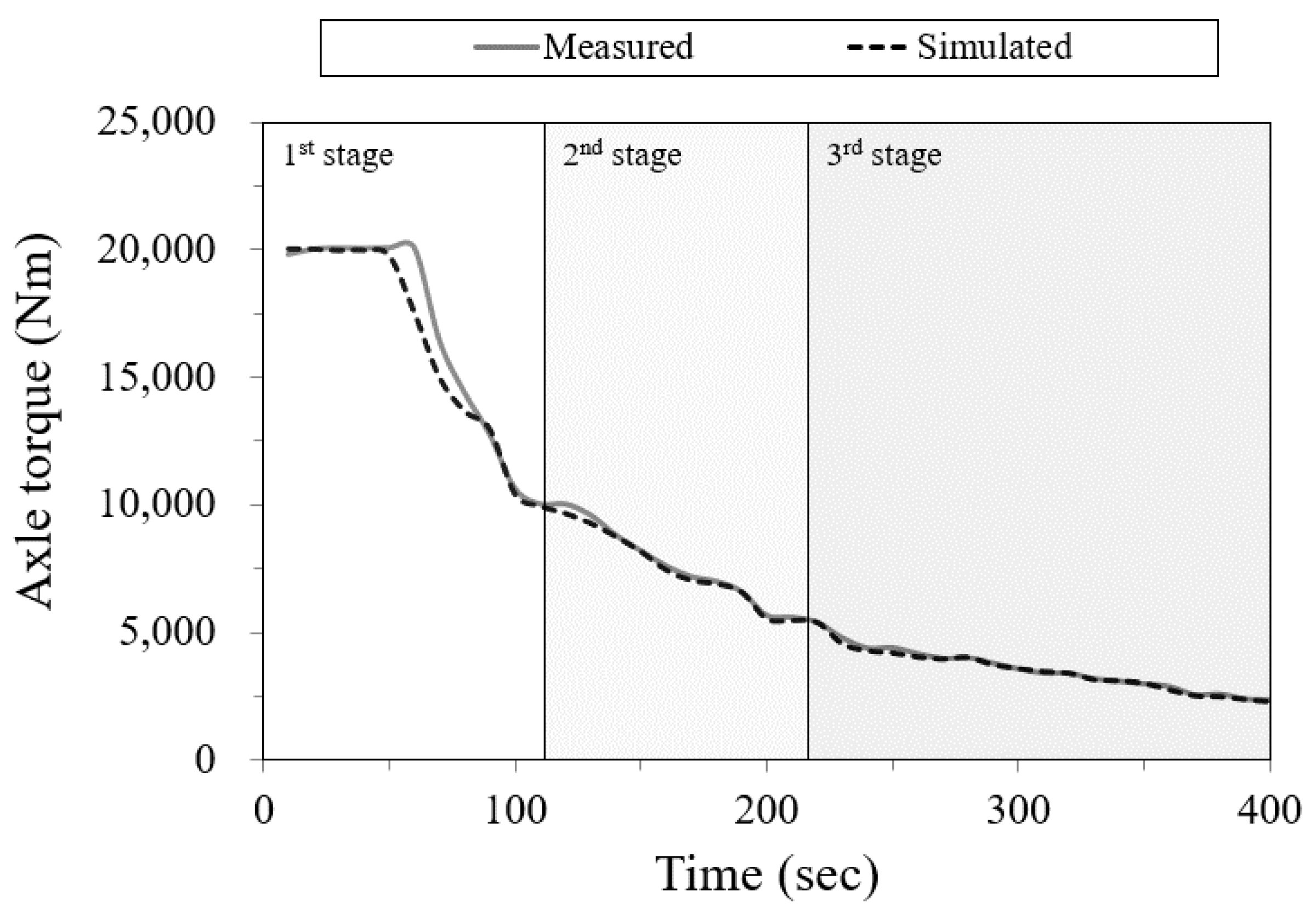
3.1.1. Axle Torque
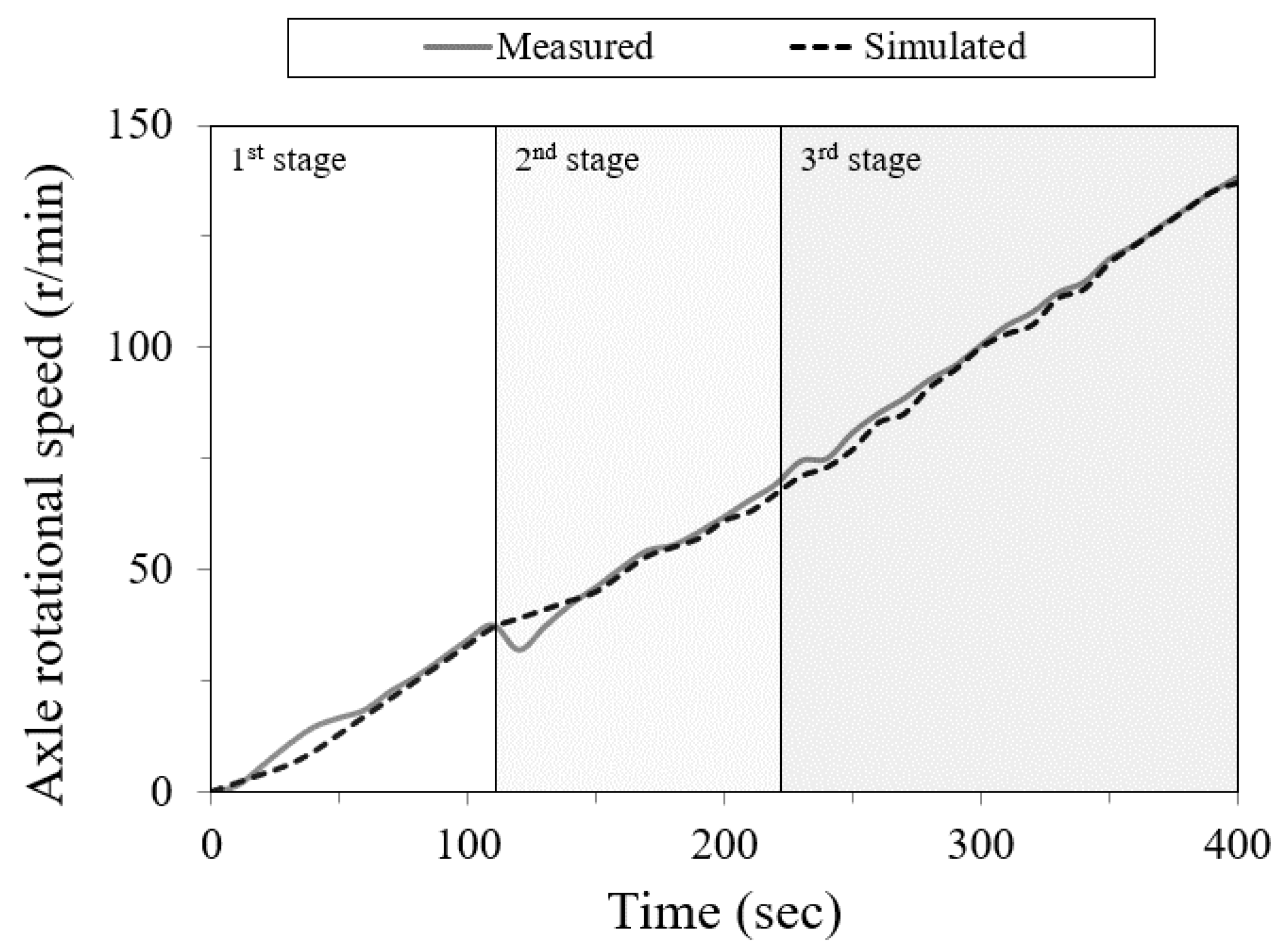
3.1.2. Axle Rotational Speed
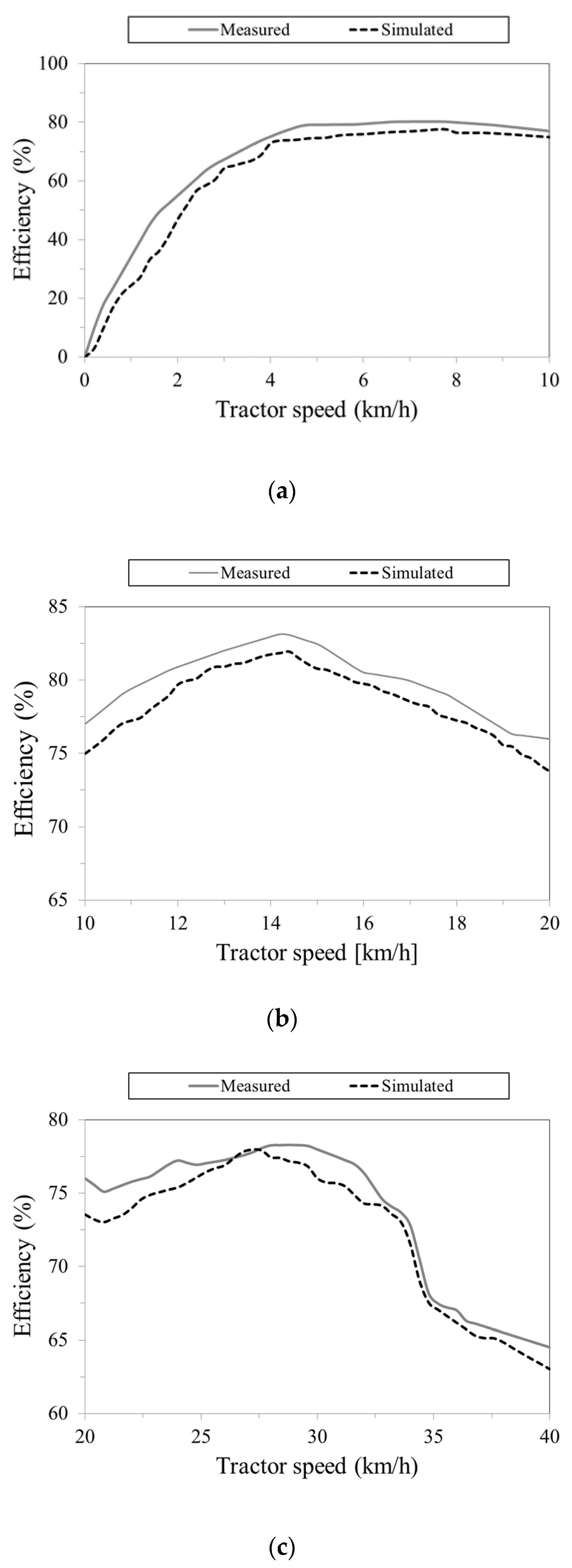
3.2. Power Transmission Efficiency
4. Discussion
5. Conclusions
- (1)
- The prototype of the HMT for a 50 kW class agricultural tractor was composed of an HSU, compound planetary gear, range shift, spiral bevel gear, and final reduction gear, and this HMT had three stages and a maximum forward speed of 40 km/h. The simulation model was developed to be the same as the prototype of the HMT. For the performance evaluation, the test bench was installed based on engine conditions of the prototype of the HMT. The axle torque, rotational speed, and power transmission efficiency were measured and simulated according to the gear stages using a bench test and simulation.
- (2)
- As a result, the axle torque rapidly decreased in the first gear stage and gradually decreased as the gear stage was increased. We also found that both the measured and simulated axle rotational speed increased constantly, and the measured value decreased slightly in the shifting sections. On the other hand, the power transmission efficiency of the first gear stage appeared to increase, and the power transmission efficiency of the second and third gear stages appeared to decrease after increasing to the maximum point. From the t-test results, there were no significant differences between the measured and simulated load data, such as axle torque, rotational speed, and power transmission of the HMT.
- (3)
- The results of linear regression showed an R-squared value of 0.988, an RMSE of 5.461, and an RD of 8.18 in the first gear stage. The results of linear regression at the second gear stage showed an R-squared of 0.971, an RMSE of 1.473, and an RD of 1.84. On the other hand, the results of linear regression at the third gear stage showed an R-squared of 0.980, an RMSE of 1.345, and an RD of 1.84. The trend of power transmission efficiency between the measured and simulated results appeared to be similar in all sections, and we obtained a simulation model with the accuracy of an R-squared value of more than 0.97.
Author Contributions
Funding
Conflicts of Interest
References
- Kim, Y.J.; Chung, S.O.; Choi, C.H.; Lee, D.H. Evaluation of Tractor PTO Severeness during Rotary Tillage Operation. J. Biosyst. Eng. 2011, 36, 163–170. [Google Scholar] [CrossRef] [Green Version]
- Kim, Y.J.; Chung, S.O.; Park, S.J.; Choi, C.H. Analysis of Power Requirement of Agricultural Tractor by Major Field Operation. J. Biosyst. Eng. 2011, 36, 79–88. [Google Scholar] [CrossRef]
- Kim, Y.J.; Lee, D.H.; Chung, S.O.; Park, S.J.; Choi, C.H. Analysis of Power Requirement of Agricultural Tractor during Baler Operation. J. Biosyst. Eng. 2011, 36, 243–251. [Google Scholar] [CrossRef] [Green Version]
- Siddique, A.A.; Kim, T.J.; Kim, Y.J. Technical Trend of the Power Shift Transmission (PST) of Agricultural Tractor. J. Drive Control 2020, 17, 68–75. [Google Scholar]
- Kim, W.S.; Kim, Y.J.; Kim, Y.S.; Baek, S.Y.; Baek, S.M.; Lee, D.H.; Nam, K.C.; Kim, T.B.; Lee, H.J. Development of control system for automated manual transmission of 45-kW agricultural tractor. Appl. Sci. 2020, 10, 2930. [Google Scholar] [CrossRef]
- Xu, X.; Dong, P.; Liu, Y.; Zhang, H. Progress in Automotive Transmission Technology. Automot. Innov. 2018, 1, 187–210. [Google Scholar] [CrossRef] [Green Version]
- Yang, S.; Bao, Y.; Tang, X.; Jiao, X.; Yang, D.; Wang, Q. Integrated control of hydromechanical variable transmissions. Math. Probl. Eng. 2015, 2015. Available online: https://pdfs.semanticscholar.org/3611/f920b490810513344f74171f18d792e0b029.pdf (accessed on 26 July 2015). [CrossRef] [Green Version]
- Xia, Y.; Sun, D.; Qin, D.; Zhou, X. Optimisation of the power-cycle hydro-mechanical parameters in a continuously variable transmission designed for agricultural tractors. Biosyst. Eng. 2020, 193, 12–24. [Google Scholar] [CrossRef]
- Rossetti, A.; MacOr, A. Multi-objective optimization of hydro-mechanical power split transmissions. Mech. Mach. Theory 2013, 62, 112–128. [Google Scholar] [CrossRef]
- Bae, M.H.; Bae, T.Y.; Choi, S.K. The Strength Analysis of Gears on Hydro-Mechanical Continuously Variable Transmission for Forklift. J. Drive Control 2016, 13, 45–51. [Google Scholar] [CrossRef] [Green Version]
- Jung, G.H.; Kim, H.E.; Kim, J.K. Performance and Transmission Efficiency Analysis of 2-Mode Hydro Mechanical Transmission. J. Korean Soc. Automot. Eng. 2005, 13, 90–98. [Google Scholar]
- Choi, S.H.; Kim, H.J.; Ahn, S.H.; Hong, S.H.; Chai, M.J.; Kwon, O.E.; Kim, S.C.; Kim, Y.J.; Choi, C.H.; Kim, H.S. Modeling and Simulation for a Tractor Equipped with Hydro-Mechanical Transmission. J. Biosyst. Eng. 2013, 38, 171–179. [Google Scholar] [CrossRef] [Green Version]
- Jung, G.H. Gear Train Design of 8-Speed Automatic Transmission for Tractor. J. Korean Soc. Fluid Power Constr. Equip. 2013, 10, 30–36. [Google Scholar]
- Jung, D.S.; Lee, Y.B.; Kang, B.S.; Kim, D.S.; Lee, G.C. Study of Test for and Evaluation of HMT for a Tractor. J. Appl. Reliab. 2019, 19, 275–783. [Google Scholar] [CrossRef]
- Park, S.U.; Bae, M.H.; Choi, S.K. Development of Hydro-Mechanical Continuously Variable Transmission for Forklift. J. Drive Control 2018, 15, 61–69. [Google Scholar]
- Jung, D.S.; Mun, J.H. Development of Hydro-Mechanical Transmission for Tractor. J. Drive Control 2018, 15, 70–76. [Google Scholar]
- Xia, Y.; Sun, D. Characteristic analysis on a new hydro-mechanical continuously variable transmission system. Mech. Mach. Theory 2018, 126, 457–467. [Google Scholar] [CrossRef]
- Sung, D.H.; Kim, H.E.; Lee, G.H.; Kim, H.S. Power Transmission Characteristics of a Hydro-Mechanical Transmission. Trans. Korean Soc. Mech. Eng. 2001, 25, 1854–1862. [Google Scholar]
- Kim, W.; Chung, S.B.; Kim, H.S. Analysis of Power Transmission Characteristics for Hydro-Mechanical Transmission Using Extended Network Theory. Trans. Korean Soc. Mech. Eng. 1996, 5, 1426–1435. [Google Scholar]
- Kim, J.H.; Kim, K.U.; Wu, Y.G. Analysis of transmission load of agricultural tractors. J. Terramech. 2000, 37, 113–125. [Google Scholar] [CrossRef]
- MacOr, A.; Rossetti, A. Optimization of hydro-mechanical power split transmissions. Mech. Mach. Theory 2011, 46, 1901–1919. [Google Scholar] [CrossRef]
- Park, Y.J.; Kim, S.C.; Kim, J.G. Analysis of Power Transmission Characteristics on the Hydromechanical Transmission for Agricultural Tractor. J. Drive Control 2015, 12, 96–100. [Google Scholar] [CrossRef]
- Kim, Y.S.; Kim, T.J.; Kim, Y.J.; Lee, S.D.; Park, S.U.; Kim, W.S. Development of a Real-Time Tillage Depth Measurement System for Agricultural Tractors: Application to the Effect Analysis of Tillage Depth on Draft Force during Plow Tillage. Sensors 2020, 20, 912. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lee, D.H.; Choi, C.H.; Chung, S.O.; Kim, Y.J.; Inoue, E.; Okayasu, T. Evaluation of tractor fuel efficiency using dynamometer and baler operation cycle. J. Fac. Agric. Kyushu Univ. 2016, 61, 173–182. [Google Scholar]
- Liu, F.; Wu, W.; Hu, J.; Yuan, S. Design of multi-range hydro-mechanical transmission using modular method. Mech. Syst. Signal Process. 2019, 126, 1–20. [Google Scholar] [CrossRef]
- Kim, W.S.; Kim, Y.J.; Chung, S.O.; Lee, D.H.; Choi, C.H.; Yoon, Y.W. Development of simulation model for fuel efficiency of agricultural tractor. Korean J. Agric. Sci. 2016, 43, 116–126. [Google Scholar] [CrossRef] [Green Version]
- Lee, N.G.; Kim, Y.J.; Kim, W.S.; Kim, Y.S.; Kim, T.J.; Baek, S.M.; Choi, Y.; Kim, Y.K.; Choi, I.S. Study on the Improvement of Transmission Error and Tooth Load Distribution using Micro-geometry of Compound Planetary Gear Reducer for Tractor Final Driving Shaft. J. Drive Control 2020, 17, 1–12. [Google Scholar]
- Kim, T.J.; Kim, W.S.; Kim, Y.S.; Chung, S.O.; Park, S.U.; Hong, S.J.; Choi, C.H.; Kim, Y.J. Strength analysis of mechanical transmission using equivalent torque of plow tillage of an 82 kW-class tractor. Korean J. Agric. Sci. 2019, 46, 723–735. [Google Scholar]
- Baek, S.M.; Kim, W.S.; Park, S.U.; Kim, Y.J. Analysis of Equivalent Torque of 78 kW Agricultural Tractor during Rotary Tillage. J. Korea Inst. Inf. Electron. Commun. Technol. 2019, 12, 359–365. [Google Scholar]
- Lee, K.J.; Kim, J.M. Power Flow Analysis for Manufacturing of Planetary Gears in an 8-speed Automatic Transmission (II): 4–8 Speeds. J. Korean Soc. Manuf. Process Eng. 2016, 15, 57–65. [Google Scholar]
- Lee, K.J.; Kim, J.M. Power Flow Analysis for Manufacturing of Planetary Gears in a 8-Speed Automatic Transmission (I): 1–3 Speeds. J. Korean Soc. Manuf. Process Eng. 2016, 15, 48–56. [Google Scholar]
- Han, S.G.; Shin, Y.I.; Yoon, C.H.; Song, C.K. Strength and Durability Analysis of the Double Planetary Gears. J. Korean Soc. Manuf. Process Eng. 2014, 13, 28–34. [Google Scholar]
- Bietresato, M.; Friso, D.; Sartori, L. Assessment of the efficiency of tractor transmissions using acceleration tests. Biosyst. Eng. 2012, 112, 171–180. [Google Scholar] [CrossRef]
- Lee, D.H.; Kim, Y.J.; Chung, S.O.; Choi, C.H.; Lee, K.H.; Shin, B.S. Analysis of the PTO load of a 75 kW agricultural tractor during rotary tillage and baler operation in Korean upland fields. J. Terramech. 2015, 60, 75–83. [Google Scholar] [CrossRef]
- Shafaei, S.M.; Kamgar, S. A comprehensive investigation on static and dynamic friction coefficients of wheat grain with the adoption of statistical analysis. J. Adv. Res. 2017, 8, 351–361. [Google Scholar] [CrossRef]
- Basak, J.K.; Qasim, W.; Okyere, F.G.; Khan, F.; Lee, Y.J.; Park, J.; Kim, H.T. Regression Analysis to Estimate Morphology Parameters of Pepper Plant in a Controlled Greenhouse System. J. Biosyst. Eng. 2019, 44, 57–68. [Google Scholar] [CrossRef]
- Kumar, A.A.; Tewari, V.K.; Nare, B. Embedded digital draft force and wheel slip indicator for tillage research. Comput. Electron. Agric. 2016, 127, 38–49. [Google Scholar] [CrossRef]
- Ashok Kumar, A.; Tewari, V.K.; Gupta, C.; Pareek, C.M. A device to measure wheel slip to improve the fuel efficiency of off road vehicles. J. Terramech. 2017, 70, 1–11. [Google Scholar] [CrossRef]
- Lee, D.H.; Kim, Y.J.; Choi, C.H.; Chung, S.O.; Inoue, E.; Okayasu, T. Development of a parallel hybrid system for agricultural tractors. J. Fac. Agric. Kyushu Univ. 2017, 62, 137–144. [Google Scholar]
- Lee, D.H.; Choi, C.H.; Chung, S.O.; Kim, Y.J.; Lee, K.H.; Shin, B.S. Development of a plow tillage cycle for an agricultural tractor. Trans. ASABE 2016, 59, 445–454. [Google Scholar]
- Baek, S.Y.; Kim, W.S.; Kim, Y.S.; Kim, Y.J.; Park, C.G.; An, S.C.; Moon, H.C.; Kim, B.S. Development of a Simulation Model for an 80 kW-class Electric All-Wheel-Drive (AWD) Tractor using Agricultural Workload. J. Drive Control 2020, 17, 27–36. [Google Scholar]
- Kim, W.S.; Kim, Y.S.; Kim, T.J.; Park, S.U.; Choi, Y.; Choi, I.S.; Kim, Y.K.; Kim, Y.J. Analysis of power requirement of 78 kW class agricultural tractor according to the major field operation. Trans. Korean Soc. Mech. Eng. 2019, 43, 911–922. [Google Scholar] [CrossRef]
- Li, Q.; Zhou, X.; Wang, S.; Liang, J. Power split transmission with continuously variable planetary ratio. Mech. Mach. Theory 2019, 140, 765–780. [Google Scholar] [CrossRef]
- Baek, S.Y.; Kim, Y.S.; Kim, W.S.; Baek, S.M.; Kim, Y.J. Development and Verification of a Simulation Model for 120 kW Class Electric AWD (All-Wheel-Drive) Tractor during Driving Operation. Energies 2020, 13, 2422. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Specification | ||
|---|---|---|---|
| Engine | Length × Width × Height (mm) | 648 × 560 × 685 | |
| Weight (kg) | 237 | ||
| Bore/Stroke (mm) | 92/110 | ||
| Displacement (L) | 2.9 | ||
| Number of cylinders | 4 | ||
| Max. Power (kW @r/min) | 55.4 @2200 | ||
| Max. torque (Nm @r/min) | 260 @1800 | ||
| HSU | Displacement (cc/min) | Pump | 0~42 (Variable) |
| Motor | 42 (Fixed) | ||
| Weight (kg) | 30 | ||
| Max. speed (r/min) | 3200 | ||
| Oil | ISO VG46 | ||
| Relief valve (MPa) | 34.3 | ||
| Charge pump (cc/min) | 11.8 | ||
| Item | Specification | |
|---|---|---|
| Input motor | Max. Power (kW) | 1000 |
| Max. torque (Nm) | 2600 | |
| Dynamometer | Max. Power (kW) | 1000 |
| Max. torque (Nm) | 2600 | |
| Torque and speed sensor | Range | 0–5000 Nm, 0–5000 r/min |
| Accuracy | ±0.05% | |
| Gear Stage | Axle Torque (Nm) | p-Value | |
|---|---|---|---|
| Measured | Simulated | ||
| 1st | 15,347.13±6210.03 * | 14,934.94±6078.32 | 0.871 |
| 2nd | 7215.97±1700.06 | 7057.00±1655.99 | 0.819 |
| 3rd | 3378.36±682.86 | 3304.68±669.99 | 0.753 |
| Gear Stage | Axle Rotational Speed (rpm) | p-Value | |
|---|---|---|---|
| Measured | Simulated | ||
| 1st | 18.13±12.41 * | 16.33±12.64 | 0.728 |
| 2nd | 53.97±13.01 | 53.67±10.53 | 0.951 |
| 3rd | 107.95±19.66 | 107.95±20.45 | 0.818 |
| Gear Stage | Power Transmission Efficiency (%) | p-Value | |
|---|---|---|---|
| Measured | Simulated | ||
| 1st | 66.76±20.62 * | 62.14±22.24 | 0.280 |
| 2nd | 78.56±2.31 | 77.91±2.66 | 0.190 |
| 3rd | 73.58±4.96 | 72.43±4.87 | 0.245 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Baek, S.-M.; Kim, W.-S.; Kim, Y.-S.; Baek, S.-Y.; Kim, Y.-J. Development of a Simulation Model for HMT of a 50 kW Class Agricultural Tractor. Appl. Sci. 2020, 10, 4064. https://doi.org/10.3390/app10124064
Baek S-M, Kim W-S, Kim Y-S, Baek S-Y, Kim Y-J. Development of a Simulation Model for HMT of a 50 kW Class Agricultural Tractor. Applied Sciences. 2020; 10(12):4064. https://doi.org/10.3390/app10124064
Chicago/Turabian StyleBaek, Seung-Min, Wan-Soo Kim, Yeon-Soo Kim, Seung-Yun Baek, and Yong-Joo Kim. 2020. "Development of a Simulation Model for HMT of a 50 kW Class Agricultural Tractor" Applied Sciences 10, no. 12: 4064. https://doi.org/10.3390/app10124064
APA StyleBaek, S. -M., Kim, W. -S., Kim, Y. -S., Baek, S. -Y., & Kim, Y. -J. (2020). Development of a Simulation Model for HMT of a 50 kW Class Agricultural Tractor. Applied Sciences, 10(12), 4064. https://doi.org/10.3390/app10124064