1. Introduction
The axle torque of a tractor is used as an indicator for designers to make major decisions, and it can be used for optimal transmission design, transmission failure diagnosis, dynamometer-based fatigue life evaluation, etc. Generally, the axle torque of a tractor differs according to the various conditions such as the soil environment, gear stage, and working type [
1,
2]. Amongst previous studies, there are some studies on axle torque measurement according to the attached implement [
3,
4], working speed [
5,
6,
7], tillage depth [
6,
8], and soil conditions [
9,
10,
11]. However, in order to measure axle torque, a telemetry system that allows for the twisting of a line is required, because the axle rotates, which is very expensive. Thus, as an alternative solution to this problem, the prediction model of tractor axle torque can be used.
There have been studies that have taken various approaches to the prediction of axle torque. According to some studies, axle torque can be predicted using traction force and tire specifications [
12,
13,
14,
15]. Zoz and Grisso [
14] reported that axle torque can be calculated using the gross traction (GT) and radius of the wheel or tractive device. The GT can be predicted from the model proposed by Brixius [
16]. However, since the axle torque during tillage operation is differently affected by various variable conditions, such as slip due to the interaction between the drive wheel and the soil, it is difficult to calculate directly using the traction force. Some researchers have used an artificial neural network (ANN) to predict engine torque [
17]. Bietresato et al. [
18] proposed an ANN-based prediction method using exhaust gas temperature and engine speed to evaluate engine performance, such as torque and brake specific fuel consumption (BSFC). Rajabi-Vandechali et al. [
19] developed a low-cost sensor (engine speed, fuel mass flow, and exhaust gas temperature) and soft computing-based prediction models to estimate engine torque. As a result, it was reported that the coefficient of determination (R
2) of the prediction model was 0.99, which means that it could replace the existing expensive method. However, such a prediction model using an artificial neural network has difficulty finding the optimal value of a parameter in a learning process, and problems, such as overfitting, may occur. Therefore, artificial intelligence is mainly used for solving nonlinear problems and need not necessarily be used for solving linear problems. Linear regression analysis can be a good alternative to the methods presented above. Linear regression models have been proposed in various research fields and are used to select explanatory variables that are highly related to actual dependent variables and to develop prediction models [
20,
21,
22]. In the field of tractors, there have been many studies using linear regression models to predict tractor traction performance [
23,
24,
25] and fuel efficiency [
26]. Kheiralla et al. [
25] performed regression analysis on the traction force of a moldboard plow, disk plow, disk harrow, and rotary tiller using the travel speed, tillage depth, and rotor speed as the main variables. Upadhyay and Raheman [
27] proposed a specific draft prediction model of a disk harrow using multiple regression analysis based on front gang angle, cone index, tillage depth, and travel speed. The literature review revealed that multiple linear regression-based approaches for predicting axle torque during tillage are rare, and most of them focus on the prediction of traction force.
In order to use regression analysis to develop a prediction model for a tractor axle model, it is important to select tractor axle torque and key variables that are meaningful and easy to measure. The engine is a power source for the driving axle torque, and representative major data of the engine load, such as engine torque and speed, are closely related to axle torque. To date, most studies have been carried out on tractors equipped with mechanical engines. However, recent tractors have been equipped with electronic engines capable of controller area networks (CAN) communication to respond to Tier-4 environmental regulations. Thus, various types of engine information, including engine torque and speed during field operation, can be measured through CAN, without an additional sensor. Some studies have evaluated a tractor’s load condition based on the fuel rate, engine speed, and percent torque data, measured via CAN [
28]. Engine load data have difficulty predicting axle torque directly due to the power loss in hydraulic and electrical systems, depending on the working conditions [
13], but since there is a significant correlation between engine load and axle torque, engine load can be used as a main variable for predicting axle torque. Tillage depth and travel speed are the main variables used in the model for predicting the required draft of the proposed major tillage tools from American Society of Agricultural and Biological Engineers (ASABE) and are expected to be closely related to axle torque [
6,
29]. In addition, slip has been used as a key variable in predicting tractor traction in many studies [
16,
20,
30,
31], and some studies have shown that the slip ratio actually affects the axle torque during tillage operation [
32]. Therefore, developing a regression model using variables that can affect various axle loads, including measurable variables in the engine, can be a good method for estimating axle torque.
In conclusion, axle torque is one of the most important parameters of tractor transmission, which needs to be continuously predicted during operation. In this study, a low-cost sensor-based prediction model that does not require the installation of an expensive wheel torque transducer of the telemetry type, which is the main advantage of using multiple linear regression, is proposed. The accurate estimation of the output axle torque exerted by attached implements through a low-cost sensor can be used for various technologies for managing tractors during field operations.
The aim of this study was to develop a prediction model for estimating axle torque by substituting an expensive axle torque sensor, using data on variables that are relatively easy to measure, with a low-cost sensor. Axle torque could be used as an important decision indicator for the optimum design, service life evaluation, and traction performance analysis of transmissions through the prediction model developed in this study. To develop and verify the model, field data were measured through moldboard plow tillage operations. The prediction model was developed based on measured variables using multiple regression. The developed model was verified using the measured actual axle torque from a field experiment.
4. Discussion
In this study, a prediction model was proposed for predicting tractor axle torque. A total of five variables were used to develop axle torque prediction models, and the Pearson correlation coefficients were highest in order of the tillage depth, slip ratio, travel speed, engine torque, and engine speed. The developed Model A using the engine parameter as a variable showed a low adjusted R
2 of 0.271, thus it is considered insufficient for use as a model for predicting axle torque. Nevertheless, in the case of Model D, which uses the engine parameter and tillage depth as variables, showed an adjusted R
2 of 0.877, and it is higher than that of Model B (R
2 adj: 0.866), which uses only the tillage depth as a single variable. Therefore, it is determined that the engine parameter can be used to improve prediction accuracy by combining it with other variables rather than using it in a prediction model as a single variable. Among the single sources, the tillage depth was regarded as the variable that could well explain the axle torque because it has high performance. In all the proposed models except Model A, the range of the adjusted R
2 were 0.813–0.925. These results were similar to the results of the prediction model for estimating the major parameters of the tractor such as the engine torque (R
2: 0.835) [
18], traction force (R
2: 0.760–0.862) [
23], and fuel consumption (R
2: 0.892–0.916) [
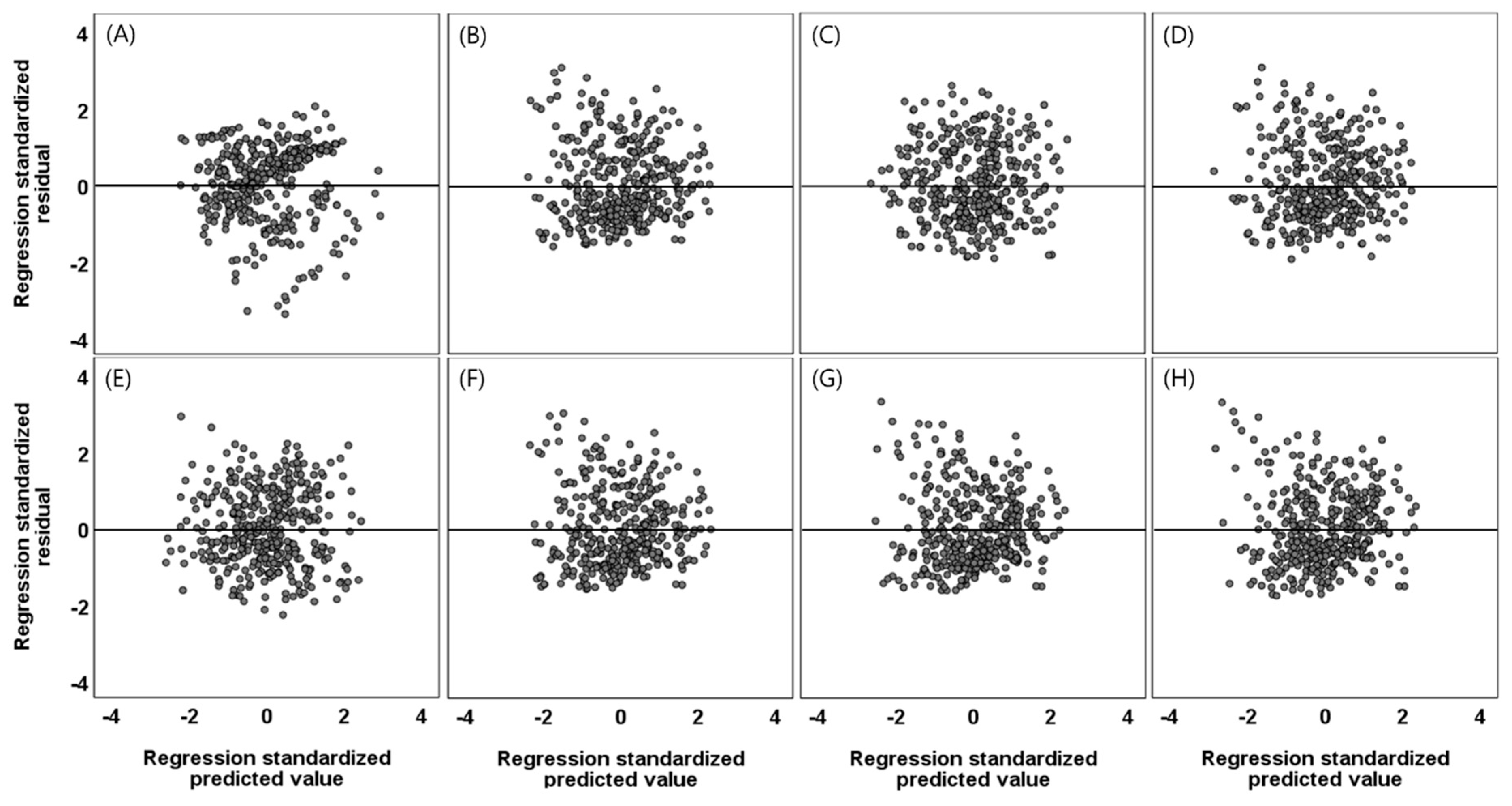
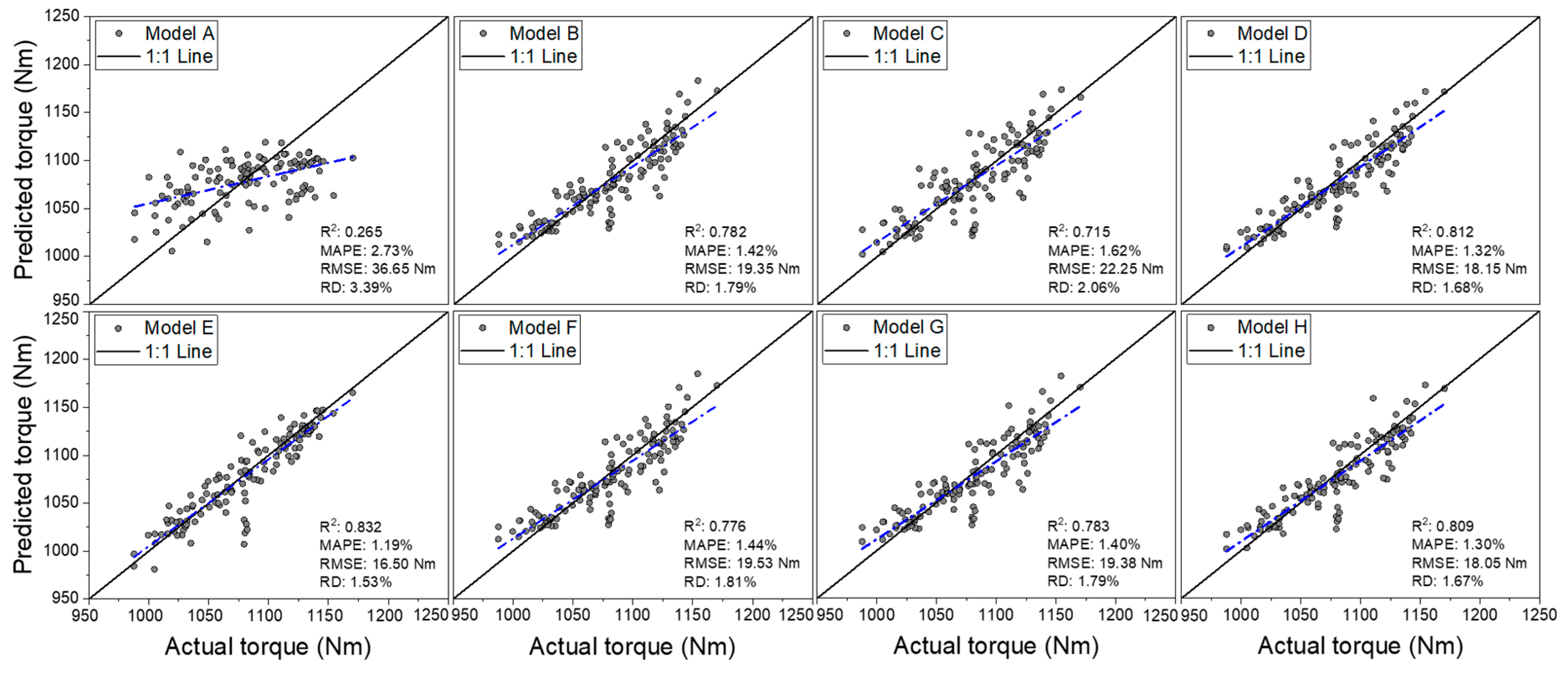
25]. The basic assumptions of regression analysis such as linearity, normality, independence, homoscedasticity, and multicollinearity were satisfied for all the proposed models except Model A. The D.W value in Model A is 1.34, and it may have difficulty guaranteeing the independence of the residuals. The verification results for the proposed model (MAPE: 1.19–3.61%) showed high prediction performance compared to the results of previous studies (Error: 1.27–3.61%) that predicted the theoretical axle torque according to the tillage depth [
15]. Therefore, we believe that the proposed models can be applied to axle torque prediction. In conclusion, in this study, the developed prediction models can well explain the axle torque of the tractor using low-cost sensors or sensor data built into the tractor during tillage operation.
5. Conclusions
Tractor axle torque can be used by engineers as an index for making various decisions in transmission fatigue life analysis, optimal design, and life evaluation. However, the existing axle torque prediction method requires an expensive torque sensor. Therefore, this study developed a prediction model that can replace the existing expensive axle torque sensor. The purpose of this study was to develop a model that predicts tractor axle torque during tillage operation. In this study, a prediction model was proposed through regression analysis using the main variables affecting tractor axle torque.
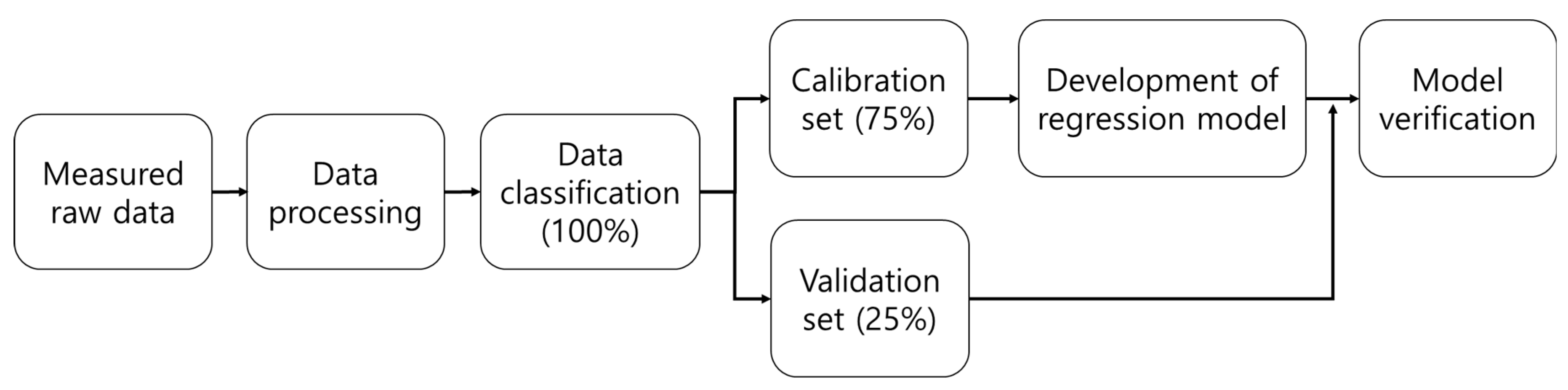
The engine parameters (engine torque and engine speed), tillage depth, travel speed, and slip ratio were selected as explanatory variables for the axle torque, which is the dependent variable. These were measured from the engine CAN communication, the built-in potentiometer installed on a three-point hitch, and the separately installed travel speed sensor. Field experiments were conducted using a tractor with a load measurement system to collect data for the explanatory variable and the dependent variable. The collected data were classified into a calibration set (75%) and a validation set (25%), which were used to develop and verify the regression analysis. A total of eight axle torque prediction regression models were proposed using each explanatory variable. The adjusted R2 of the proposed regression model showed a range of 0.271 to 0.925. Among them, the prediction model E—with engine torque, engine speed, and travel speed as explanatory variables—showed an adjusted R2 of 0.925. All the prediction models were tested for the basic assumptions of the regression analysis: linearity, normality, independence, homoscedasticity, and multicollinearity. All the prediction models proposed using the validation set were verified. As a result, all the prediction models showed an MAPE of less than 2.8%, and, in particular, Models E and H showed MAPEs of 1.19 and 1.30%, respectively, demonstrating a high accuracy. Therefore, it was found that the proposed prediction models are applicable to actual axle torque prediction.
This research is intended to propose a prediction model for each source, taking into account the data that the user can collect, because it is difficult for users to collect all the data. Since most previous studies focused on models for predicting engine torque, traction force, and fuel consumption, the main contribution of this study was to develop a low-cost sensor data-based axle torque prediction model. Despite these contributions, this study has limitation that the proposed model was developed and validated using data measured under limited working environment conditions (attached implement, gear stage, soil environment, and so on). The prediction model must be supplemented using data according to various conditions, because the tractor axle torque depends on various working conditions, such as the soil, gear stage, attached implement, ballast, etc. Therefore, in a future study, field data according to the various working conditions will be measured through experiments, and the prediction model will be expanded.

 ,
, 










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}