Robust Parking Block Segmentation from a Surveillance Camera Perspective


Abstract
:1. Introduction
- Typical Attributes. Similar painted lines, other vehicles, kerbstones, non-plain floor, etc.
- Road Conditions. Partially damaged parking lines, paving, etc.
- Surrounding Conditions. Weather, illumination, light source angle, etc.
- Parking lots are viewed from the space.
- Texture appearance prevails over other features.
- The view is orthogonal.
- Instances can be rotated and form a manifold with the sole condition they do not overlap.
- Variable angle of parking spots relative to the road, no more than 180 degrees.
- Satellite images rarely have shadows and we could remove them by using histogram normalization.
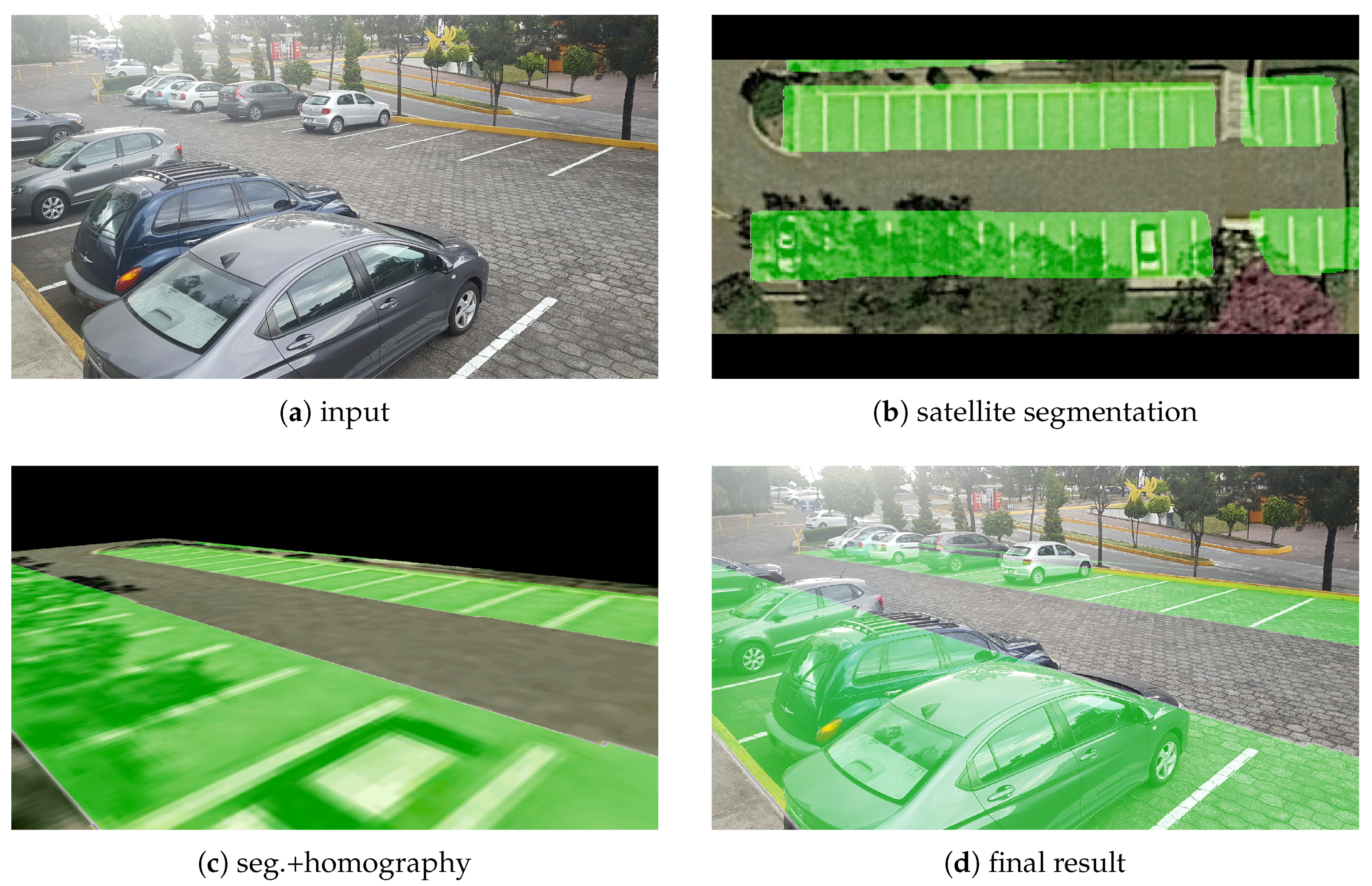
- Segment the parking blocks on the satellite image.
- Calculate an homography between the two perspectives.
- Translate the results of the satellite image into the surveillance camera image.
Related Works
2. Methodology
| Algorithm 1 Parking Block Segmentation from a Surveillance Camera Perspective | |
| Input:—Pre-Trained CNN —Satellite image —Camera extrinsic parameters Output:—Segmented camera-view parking lot
| ▹ Read image from camera ▹ Crop and scale the satellite image ▹ Get camera parameters ▹ Get homography from correspondence points ▹ Use ANN to segment satellite image ▹ Apply hom. to segmented satellite image |
3. Dataset
- Randomly crop by a value between 0 and 50 pixels
- Horizontally flip 50% of the images
- Vertically flip 50% of the images
- Rotate images by a value between −45 and 45 degrees
3.1. Image Collection Procedure
- They show outdoor parking lots.
- At clear orthogonal daylight, i.e., photos taken in the day, regardless of brightness levels.
- Demarcated using international standards or the ones corresponding to that country for public parking lots.
- Meant to harbor vehicles no larger than full-sized cars (no more than 5350 mm of length).
- Full parking lot view if possible.
- At least a block of 3 parking spots must be visible.
- The resulting image must have the same zoom as the images in the training set, regardless of its width and height.
- The parking space preferably must be on the center of the image.
- Edge structures that do not correspond to parking spots and traffic lanes can be safely excluded.
3.2. Annotated Attributes
- Parking spots outside the parking lot.
- Badly parked vehicles, including those parked on the traffic lane and non-parking spot (benches, gardens, etc.)
- Debris or machinery in the parking spot when it is used as manner of storage facility.
- Trees in the way of the parking spot.
3.3. Dataset Statistics
3.4. Evaluation Protocol
4. Experiments and Results
- Randomly crop by a value between 0 and 50 pixels
- Horizontally flip 50% of the images
- Vertically flip 50% of the images
- Rotate images by a value between −45 and 45 degrees
4.1. Convolutional Neural Networks Setup and Training
<jittering was used>j-<batch size>b-<initial learning rate>l-<minimum learning rate>r
4.2. Expected Results
4.3. Image Segmentation Results
5. Conclusions and Recommendations
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Harrell, E. Violent Victimization Committed by Strangers, 1993–2010; Bureau Justice Statistics Special Reports; US Department of Justice: Washington, DC, USA, 2012. [Google Scholar]
- Sevillano, X.; Mármol, E.; Fernandez-Arguedas, V. Towards smart traffic management systems: Vacant on-street parking spot detection based on video analytics. In Proceedings of the 17th International Conference on Information Fusion (FUSION), Salamanca, Spain, 7–10 July 2014; pp. 1–8. [Google Scholar]
- Huang, T.; Koller, D.; Malik, J.; Ogasawara, G.; Rao, B.; Russell, S.; Weber, J. Automatic Symbolic Traffic Scene Analysis Using Belief Networks. In Proceedings of the Twelfth National Conference on Artificial Intelligence, 2nd ed.; American Association for Artificial Intelligence: Menlo Park, CA, USA, 1994; pp. 966–972. [Google Scholar]
- Seo, Y.W.; Ratliff, N.D.; Urmson, C. Self-Supervised Aerial Image Analysis for Extracting Parking Lot Structure. In Proceedings of the International Joint Conferences on Artificial Intelligence IJCAI, Pasadena, CA, USA, 11–17 July 2009; pp. 1837–1842. [Google Scholar]
- Sastre, R.J.L.; Jimenez, P.G.; Acevedo, F.J.; Bascon, S.M. Computer Algebra Algorithms Applied to Computer Vision in a Parking Management System. In Proceedings of the 2007 IEEE International Symposium on Industrial Electronics, Vigo, Spain, 4–7 June 2007; pp. 1675–1680. [Google Scholar]
- Weis, T.; May, B.; Schmidt, C. A Method for Camera Vision Based Parking Spot Detection; SAE Technical Paper Series; SAE International: Warrendale, PA, USA, 2006. [Google Scholar]
- Kabak, M.O.; Turgut, O. Parking spot detection from aerial images. In Stanford University, Final Project Autumn 2010, Machine Learning Course CS229; Stanford University: Stanford, CA, USA, 2010. [Google Scholar]
- Everingham, M.; Van Gool, L.; Williams, C.K.I.; Winn, J.; Zisserman, A. The Pascal Visual Object Classes (VOC) Challenge. Int. J. Comput. Vis. 2010, 88, 303–338. [Google Scholar] [CrossRef] [Green Version]
- Almeida, P.R.; Oliveira, L.S.; Britto, A.S.; Silva, E.J.; Koerich, A.L. PKLot—A Robust Dataset for Parking Lot Classification The PKLot Dataset. Expert Syst. Appl. 2015, 42, 1–6. [Google Scholar] [CrossRef] [Green Version]
- King, D.E. Dlib-ml: A Machine Learning Toolkit. J. Mach. Learn. Res. 2009, 10, 1755–1758. [Google Scholar]
- Huang, C.C.; Wang, S.J.; Change, Y.J.; Chen, T. A Bayesian hierarchical detection framework for parking space detection. In Proceedings of the 2008 IEEE International Conference on Acoustics, Speech and Signal Processing, Las Vegas, NV, USA, 31 March–4 April 2008; pp. 2097–2100. [Google Scholar]
- Huang, C.; Wang, S. A Hierarchical Bayesian Generation Framework for Vacant Parking Space Detection. IEEE Trans. Circuits Syst. Video Technol. 2010, 20, 1770–1785. [Google Scholar] [CrossRef]
- Mexas, A.H.; Marengoni, M. Unsupervised Recognition of Parking Lot Areas. In Proceedings of the International Conference on Machine Vision and Machine Learning, Prague, Czech Republic, 14–15 August 2014. Paper No. 68. [Google Scholar]
- Koutaki, G.; Minamoto, T.; Uchimura, K. Extraction of Parking Lot Structure from Aerial Image in Urban Areas. Int. J. Innov. Comput. Inf. Control 2016, 12, 371–383. [Google Scholar]
- Cheng, L.; Tong, L.; Li, M.; Liu, Y. Extracting Parking Lot Structures from Aerial Photographs. Photogramm. Eng. Remote Sens. 2014, 80, 151–160. [Google Scholar] [CrossRef]
- Jung, H.G.; Kim, D.S.; Yoon, P.J.; Kim, J. Parking Slot Markings Recognition for Automatic Parking Assist System. In Proceedings of the 2006 IEEE Intelligent Vehicles Symposium, Tokyo, Japan, 13–15 June 2006; pp. 106–113. [Google Scholar]
- Hsieh, M.R.; Lin, Y.L.; Hsu, W.H. Drone-Based Object Counting by Spatially Regularized Regional Proposal Network. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017. [Google Scholar]
- Murphy, K.P. Machine Learning: A Probabilistic Perspective; MIT Press: Cambridge, MA, USA, 2013; pp. 67–72. [Google Scholar]
- Cisek, D.; Mahajan, M.; Dale, J.; Pepper, S.; Lin, Y.; Yoo, S. A transfer learning approach to parking lot classification in aerial imagery. In Proceedings of the 2017 New York Scientific Data Summit (NYSDS), New York, NY, USA, 6–9 August 2017; pp. 1–5. [Google Scholar]
- Amato, G.; Carrara, F.; Falchi, F.; Gennaro, C.; Meghini, C.; Vairo, C. Deep learning for decentralized parking lot occupancy detection. Expert Syst. Appl. 2017, 72, 327–334. [Google Scholar] [CrossRef]
- Cordts, M.; Omran, M.; Ramos, S.; Rehfeld, T.; Enzweiler, M.; Benenson, R.; Franke, U.; Roth, S.; Schiele, B. The Cityscapes Dataset for Semantic Urban Scene Understanding. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 3213–3223. [Google Scholar]
- Marmanis, D.; Wegner, J.D.; Galliani, S.; Schindler, K.; Datcu, M.; Stilla, U. Semantic Segmentation of Aerial Images with an Ensemble of Cnns. Int. Soc. Photogramm. Remote Sens. (ISPRS) Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 3, 473–480. [Google Scholar]
- Marmanis, D.; Schindler, K.; Wegner, J.; Galliani, S.; Datcu, M.; Stilla, U. Classification with an edge: Improving semantic image segmentation with boundary detection. Int. Soc. Photogramm. Remote Sens. (ISPRS) J. Photogramm. Remote Sens. 2018, 135, 158–172. [Google Scholar] [CrossRef] [Green Version]
- Demir, I.; Koperski, K.; Lindenbaum, D.; Pang, G.; Huang, J.; Basu, S.; Hughes, F.; Tuia, D.; Raska, R. Deepglobe 2018: A challenge to parse the earth through satellite images. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Salt Lake City, UT, USA, 18–22 June 2018; pp. 172–181. [Google Scholar]
- Long, J.; Shelhamer, E.; Darrell, T. Fully Convolutional Networks for Semantic Segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 3431–3440. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. In International Conference on Medical Image Computing and Computer-Assisted Intervention; Springer: Cham, Switzerland, 2015; pp. 234–241. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet Classification with Deep Convolutional Neural Networks. In Advances in Neural Information Processing Systems 25; Pereira, F., Burges, C.J.C., Bottou, L., Weinberger, K.Q., Eds.; Curran Associates, Inc.: New York, NY, USA, 2012; pp. 1097–1105. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Identity Mappings in Deep Residual Networks. In European Conference on Computer Vision (ECCV); Leibe, B., Matas, J., Sebe, N., Welling, M., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 630–645. [Google Scholar]
- Lin, T.Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft coco: Common objects in context. In European Conference on Computer Vision; Springer: Cham, Switzerland, 2014; pp. 740–755. [Google Scholar]
- Bengio, Y. Practical recommendations for gradient-based training of deep architectures. In Neural Networks: Tricks of the Trade; Springer: Cham, Switzerland, 2012; pp. 437–478. [Google Scholar]
- Smith, L.N. Cyclical learning rates for training neural networks. In Proceedings of the 2017 IEEE Winter Conference on Applications of Computer Vision, Santa Rosa, CA, USA, 24–31 March 2017; pp. 464–472. [Google Scholar]
- Sutskever, I.; Martens, J.; Dahl, G.; Hinton, G. On the importance of initialization and momentum in deep learning. In Proceedings of the 30th International Conference on Machine Learning, Atlanta, GA, USA, 17–19 June 2013; pp. 1139–1147. [Google Scholar]
- Wang, X.; Hanson, A.R. Parking lot analysis and visualization from aerial images. In Proceedings of the Fourth IEEE Workshop on Applications of Computer Vision, Princeton, NJ, USA, 19–21 October 1998; pp. 36–41. [Google Scholar]
- Zhang, H.; Fritts, J.E.; Goldman, S.A. Image segmentation evaluation: A survey of unsupervised methods. Comput. Vis. Image Underst. 2008, 110, 260–280. [Google Scholar] [CrossRef] [Green Version]
- Altwaijry, H.; Trulls, E.; Hays, J.; Fua, P.; Belongie, S. Learning to Match Aerial Images With Deep Attentive Architectures. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 3539–3547. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year | Statistics | Notes |
|---|---|---|
| 2018 | Only 1 class discriminating between parking spot and other spaces. Train: 300 images 4034 labelme polygons Validation: 100 images 1513 labelme polygons Test: 101 images 1459 labelme polygons | Images were taken from Google Maps API at zoom level 20. |
| Hyperparam. | Value | Ab. | Explanation |
|---|---|---|---|
| sample size | 300 initial instances and 30,300 instances by augmentation | j | More data is always the best way of reducing the variance without increasing the bias. |
| batch size | {16,30,32} | b | Using the full instance always gives better accuracy than using a randomly partitioned batch size. However, the model evaluates the full gradient on each epoch and it making it too expensive to train. Using mini batches can ameliorate this problem, although the exact size cannot be taken for granted to be the largest because we are dealing with an stochastic way of partitioning the data. We tuned up this parameter empirically. |
| initial learning rate | 0.1–0.01 | l | This value was set taking into account the recommendation of Reference [30]; Smith [31] |
| minimum learning rate | 0.00001–0.000001 | r | A smaller learning rate produces more stable hops in the gradient on the seek of optimal weight parameters. Too small learning rate bogs down the convergence speed, though. |
| Parameters | Overall Accuracy | IoU | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Mean | Std | Min | 50% | Max | Mean | Std | Min | 50% | Max | |
| 0j-16b-0.01l-0.000001r | 84.5 | 8.2 | 49.5 | 86.5 | 96.8 | 57.7 | 20.1 | 0.0 | 62.1 | 95.2 |
| 0j-16b-0.01l-0.00001r | 84.9 | 8.5 | 50.1 | 87.5 | 95.0 | 57.6 | 20.4 | 4.2 | 60.1 | 92.7 |
| 0j-16b-0.1l-0.000001r | 85.7 | 7.8 | 50.8 | 87.3 | 96.4 | 59.5 | 20.0 | 2.4 | 62.1 | 94.7 |
| 0j-16b-0.1l-0.00001r | 84.7 | 8.9 | 50.4 | 87.2 | 97.3 | 57.7 | 20.3 | 3.3 | 59.0 | 96.0 |
| 0j-30b-0.01l-0.000001r | 85.0 | 8.2 | 50.6 | 87.0 | 98.1 | 58.3 | 20.5 | 0.8 | 59.7 | 97.0 |
| 0j-30b-0.01l-0.00001r | 84.5 | 7.8 | 53.6 | 86.3 | 96.4 | 57.7 | 19.7 | 0.0 | 60.3 | 94.6 |
| 0j-30b-0.1l-0.000001r | 85.2 | 8.4 | 50.2 | 87.6 | 97.5 | 58.9 | 20.3 | 2.4 | 59.8 | 96.2 |
| 0j-30b-0.1l-0.00001r | 85.1 | 8.3 | 49.4 | 87.3 | 96.8 | 58.9 | 19.6 | 1.5 | 60.2 | 95.1 |
| 0j-32b-0.01l-0.00001r | 84.5 | 8.0 | 52.7 | 87.0 | 95.3 | 57.5 | 19.8 | 0.0 | 60.1 | 91.7 |
| 0j-32b-0.1l-0.00001r | 85.2 | 8.0 | 50.9 | 87.3 | 96.5 | 59.3 | 19.9 | 1.6 | 61.4 | 94.8 |
| 1j-16b-0.1l-0.000001r | 82.7 | 10.5 | 45.8 | 86.5 | 94.9 | 53.9 | 21.3 | 8.6 | 59.2 | 90.5 |
| 1j-16b-0.1l-0.00001r | 84.0 | 8.2 | 59.7 | 86.6 | 94.6 | 56.0 | 21.1 | 11.1 | 58.5 | 91.7 |
| 1j-30b-0.1l-0.000001r | 83.6 | 8.9 | 51.7 | 86.3 | 96.1 | 56.0 | 21.1 | 3.3 | 59.3 | 90.2 |
| 1j-30b-0.1l-0.00001r | 83.8 | 8.4 | 54.4 | 86.4 | 95.8 | 56.8 | 19.0 | 9.6 | 59.1 | 92.3 |
| 1j-32b-0.1l-0.00001r | 83.8 | 9.2 | 51.4 | 86.7 | 95.2 | 56.3 | 21.1 | 3.2 | 60.3 | 93.0 |
| ground-truth with-homography | 88.2 | 8.8 | 58.4 | 91.3 | 96.7 | 66.5 | 20.3 | 9.2 | 72.2 | 92.2 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hurst-Tarrab, N.; Chang, L.; Gonzalez-Mendoza, M.; Hernandez-Gress, N. Robust Parking Block Segmentation from a Surveillance Camera Perspective. Appl. Sci. 2020, 10, 5364. https://doi.org/10.3390/app10155364
Hurst-Tarrab N, Chang L, Gonzalez-Mendoza M, Hernandez-Gress N. Robust Parking Block Segmentation from a Surveillance Camera Perspective. Applied Sciences. 2020; 10(15):5364. https://doi.org/10.3390/app10155364
Chicago/Turabian StyleHurst-Tarrab, Nisim, Leonardo Chang, Miguel Gonzalez-Mendoza, and Neil Hernandez-Gress. 2020. "Robust Parking Block Segmentation from a Surveillance Camera Perspective" Applied Sciences 10, no. 15: 5364. https://doi.org/10.3390/app10155364
APA StyleHurst-Tarrab, N., Chang, L., Gonzalez-Mendoza, M., & Hernandez-Gress, N. (2020). Robust Parking Block Segmentation from a Surveillance Camera Perspective. Applied Sciences, 10(15), 5364. https://doi.org/10.3390/app10155364