Bayesian Calibration of Hysteretic Parameters with Consideration of the Model Discrepancy for Use in Seismic Structural Health Monitoring



Abstract
:1. Introduction
2. Materials and Methods
2.1. Discrepancy Model
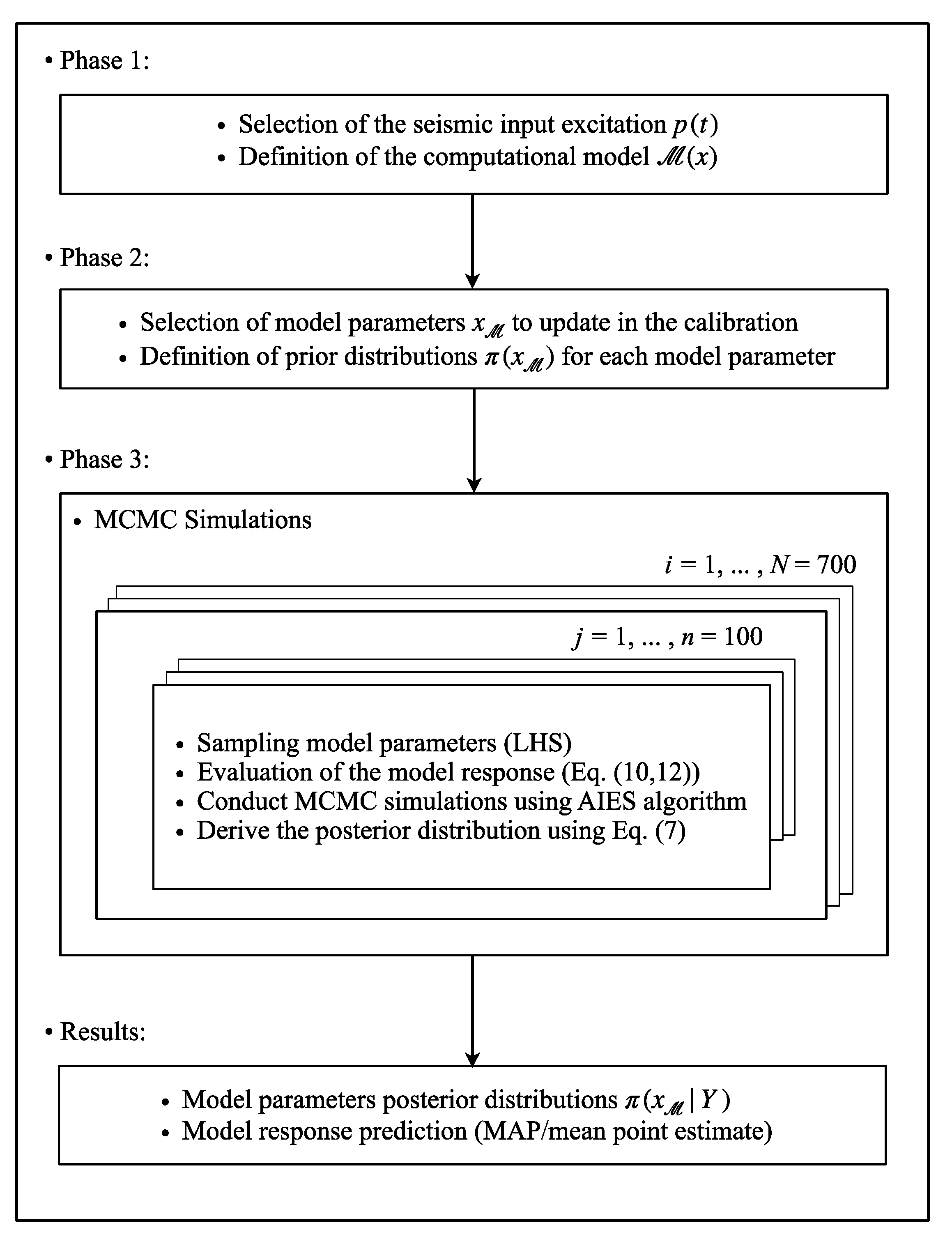
2.2. Bayesian Calibration Procedure
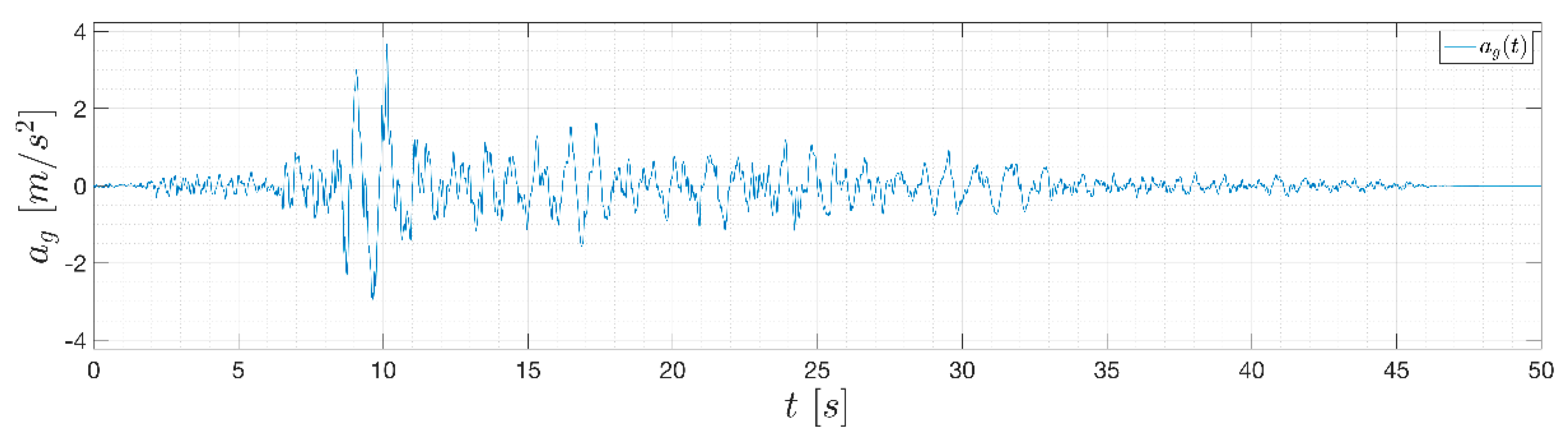
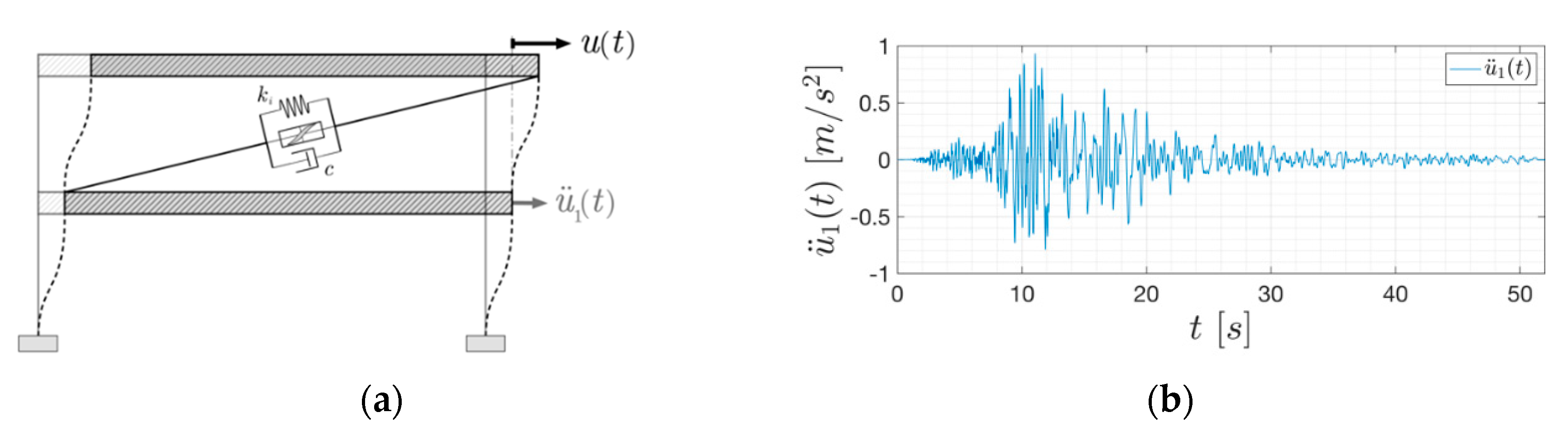
- Phase 1: definition of the seismic input excitation and of the computational model. First, a ground earthquake acceleration record must be selected as seismic input excitation of the system. Then, one specifies general options for the physical model and its governing laws. In this work the system of Ordinary Differential Equations (ODEs) governing the Bouc–Wen hysteretic oscillator (Section 3) are implemented and solved numerically with the explicit Runge–Kutta method.
- Phase 2: definition of the probabilistic prior information on the model parameters. Once the computational model is defined, one has to select carefully which model parameters to include in the calibration in order to get a reliable set of physical values from the resulting posteriors estimates after the Bayesian updating. Prior information on possible values of the hyperparameters are set by setting their prior probability distributions , defining for each hyperparameter the type of univariate distribution (i.e., uniform, Gaussian, lognormal distributions, etc.) and its statistical moments. The prior information is obtained making some considerations about the amount of the dissipated energy during the hysteresis.
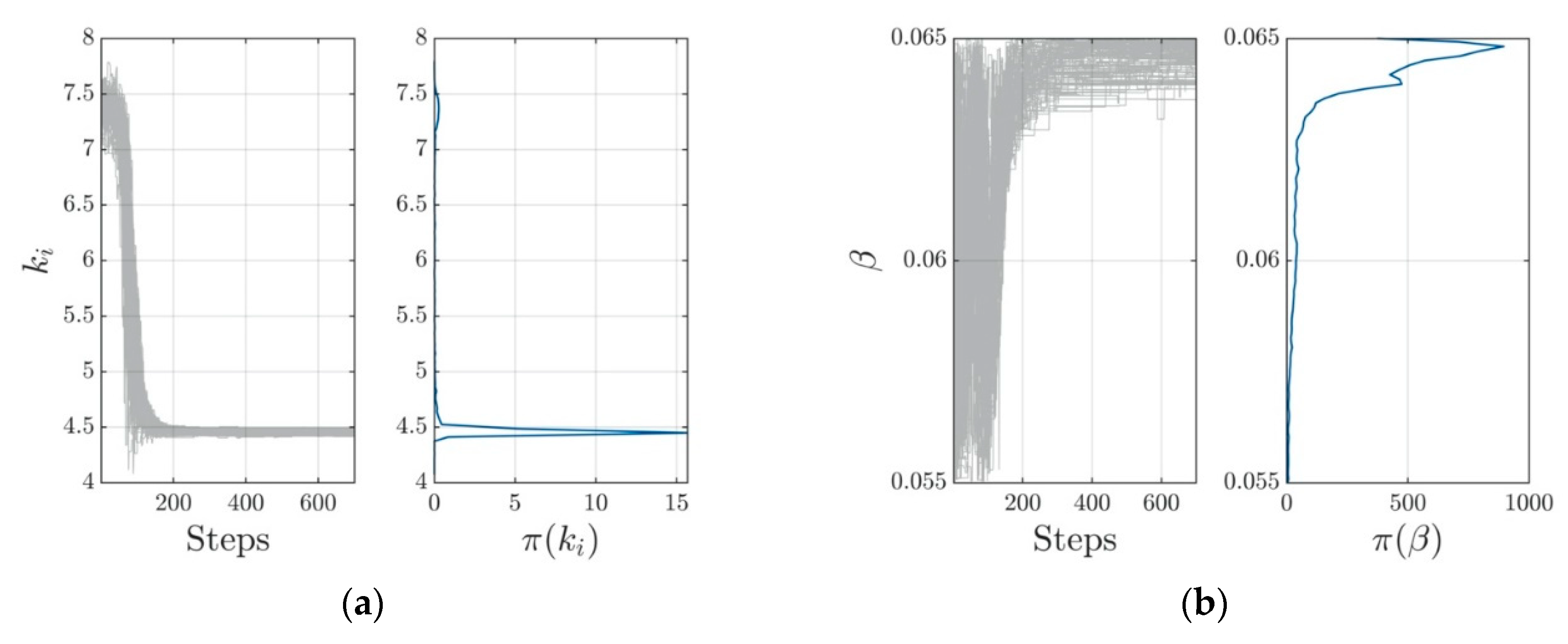
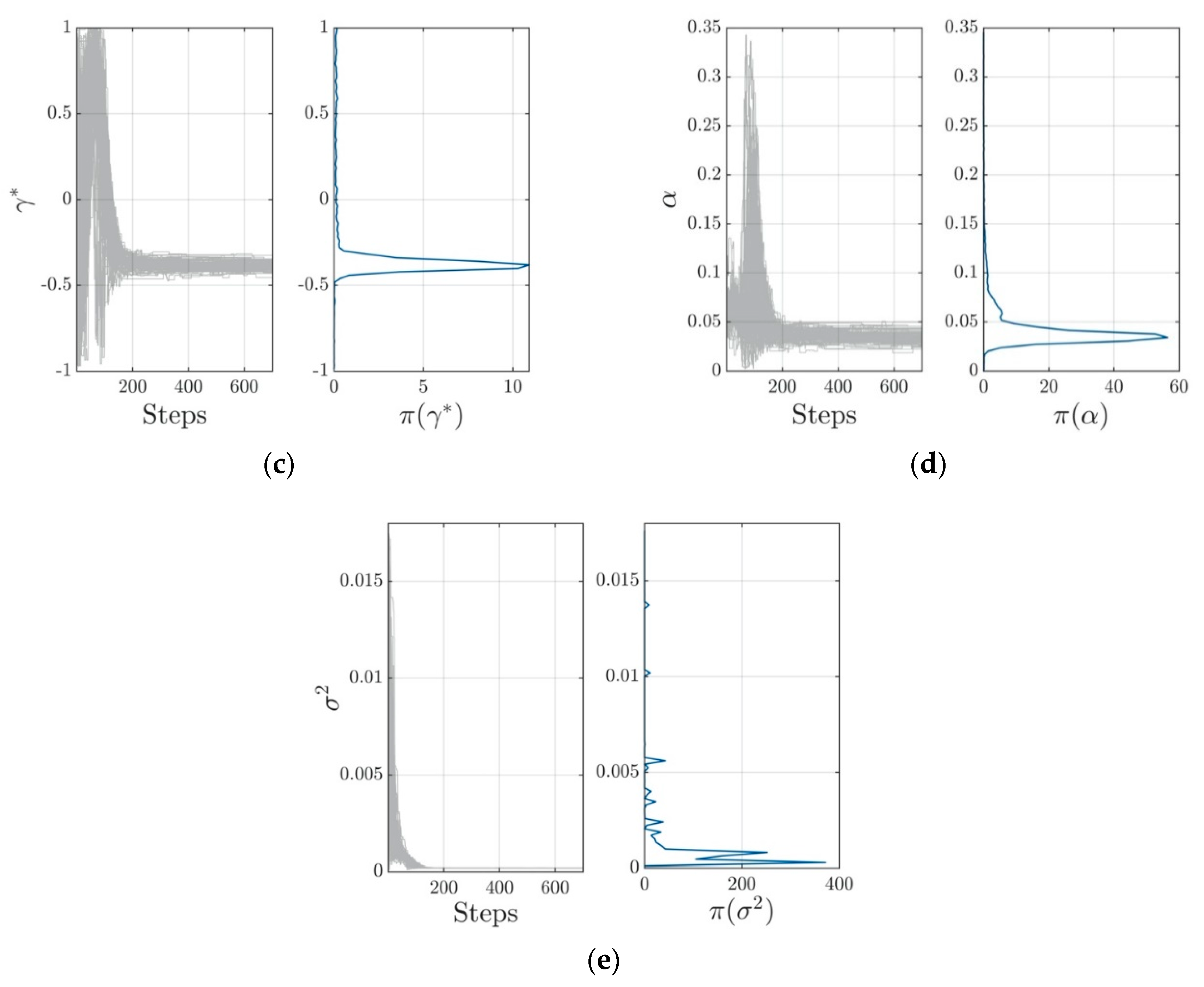
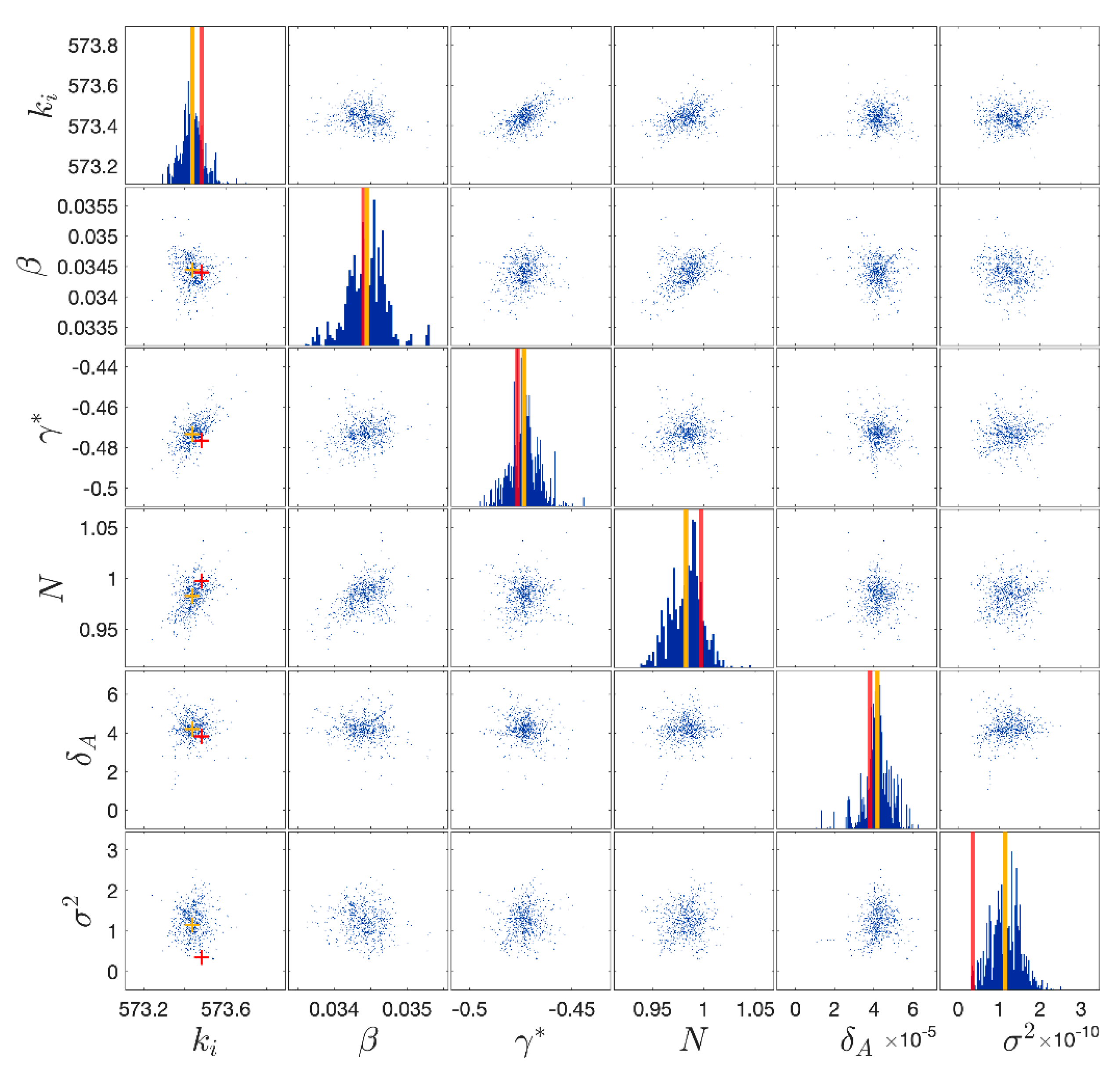
- Phase 3: Bayesian model updating. At this stage, the Bayesian model updating can be carried out using the experimental data inferring the posterior distributions of the hyperparameters. However, in many practical applications, a closed form of Equation (7) does not exist. For this reason, Markov Chain Monte Carlo (MCMC) simulations have been conducted herein, allowing for an approximate expectation in Equation (8).
3. Results
3.1. Numerical Benchmark: Calibration of a SDoF Bouc–Wen Type Hysteretic System
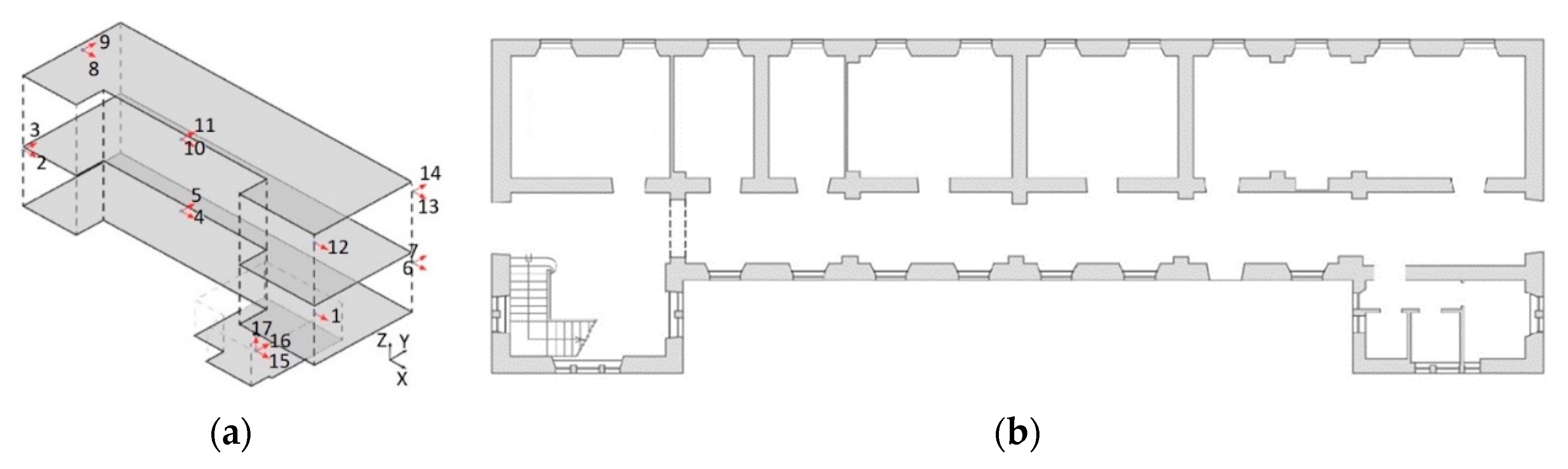
3.2. Demonstration on a Case Study
3.2.1. Reference Model
- The adopted procedure allowed verification of the consistency of the assumed nonlinear model. This was done by checking the stability of the values of the model parameters over time.
- The procedure allowed for the collection of timely information on the health of the structure immediately after the occurrence of the earthquake.
3.2.2. Bayesian Calibration of the Reduced Single DoF Reference Model
3.2.3. Models for Stiffness Degradation
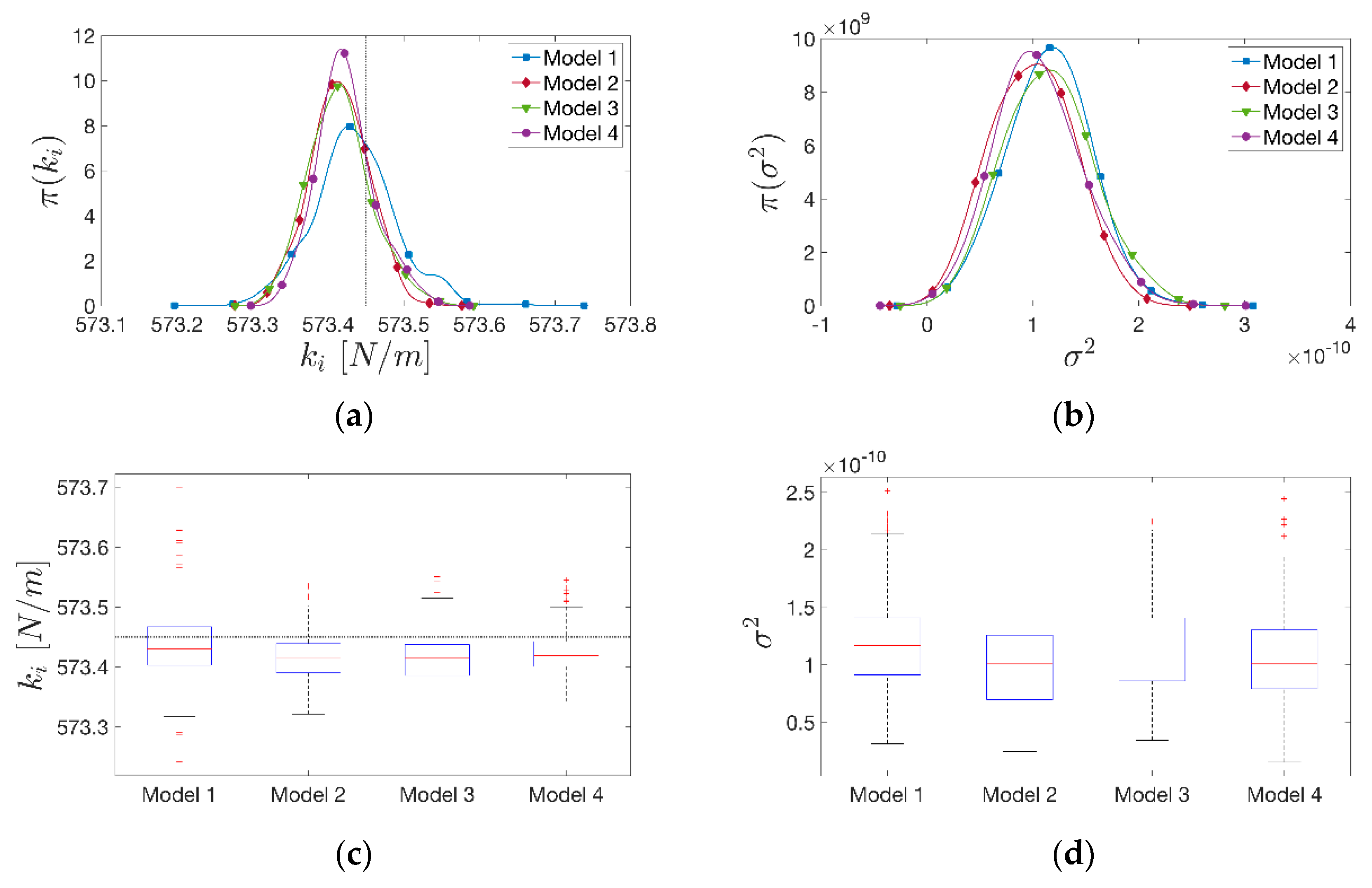
3.2.4. Comparison of the Calibrated Models
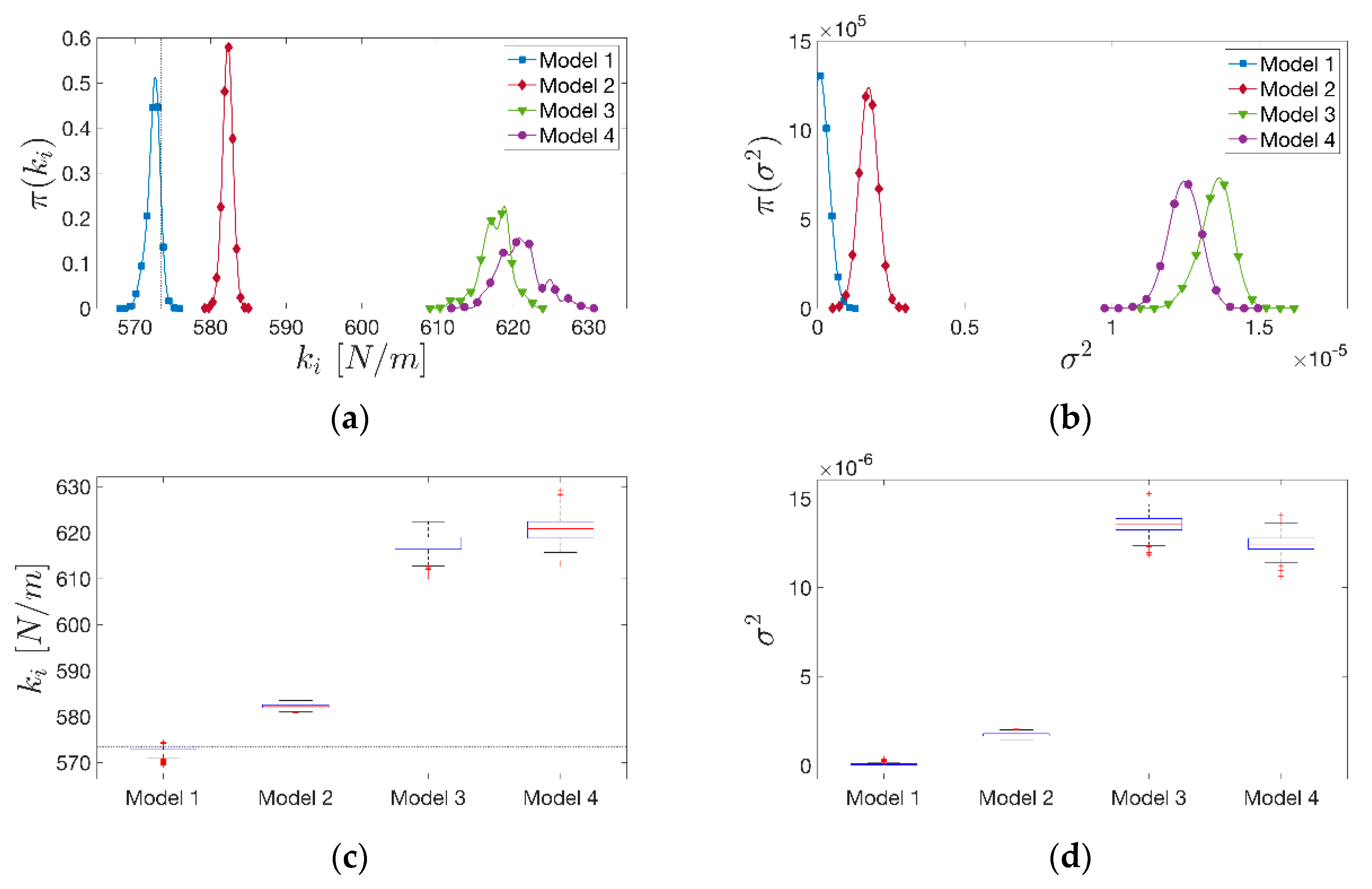
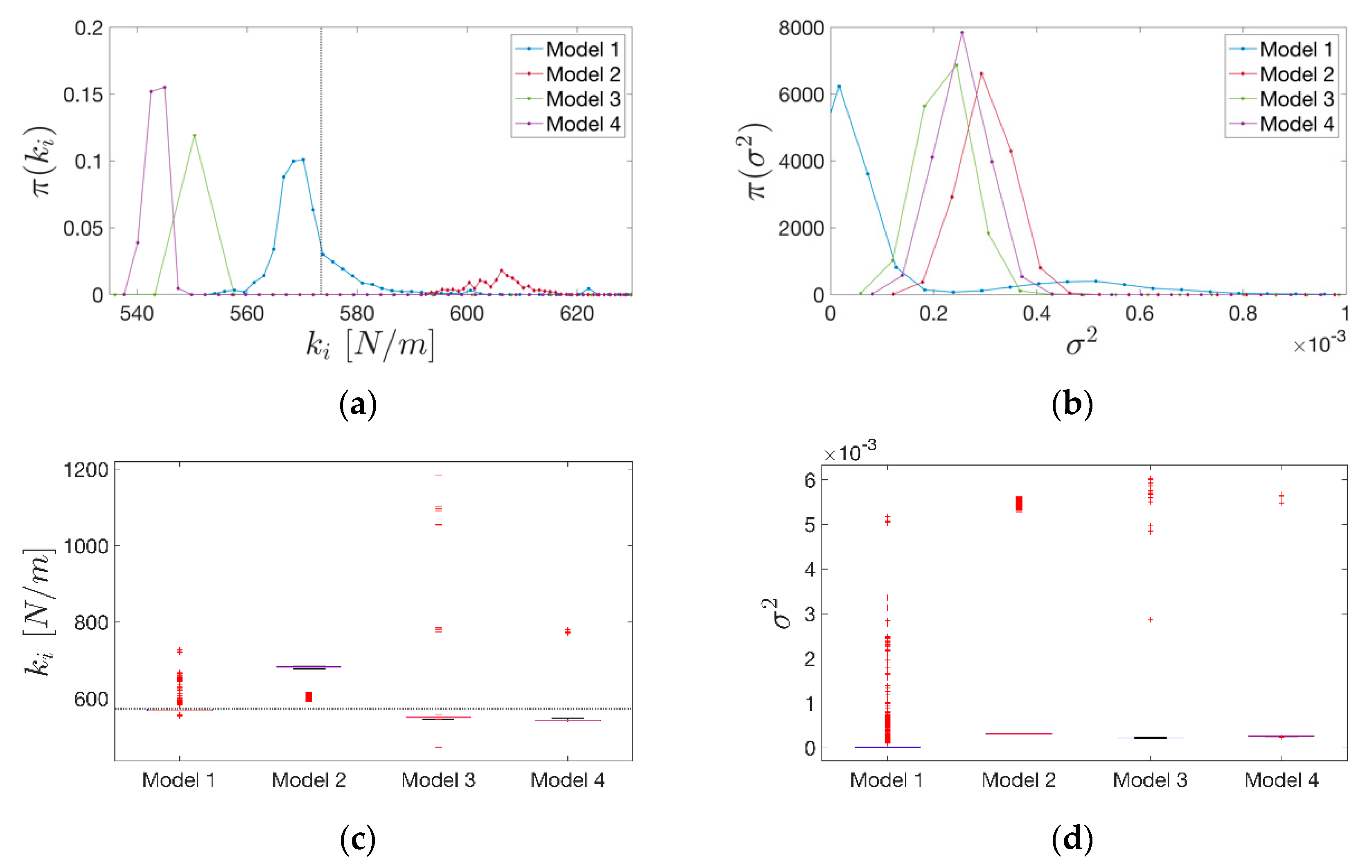
3.3. Influence of the Degradation Level on Model Parameters Inference
3.3.1. Medium Level of Degradation
3.3.2. High Level of Degradation
4. Discussion
5. Conclusions
- (i)
- explicitly define the errors and uncertainties present in the model;
- (ii)
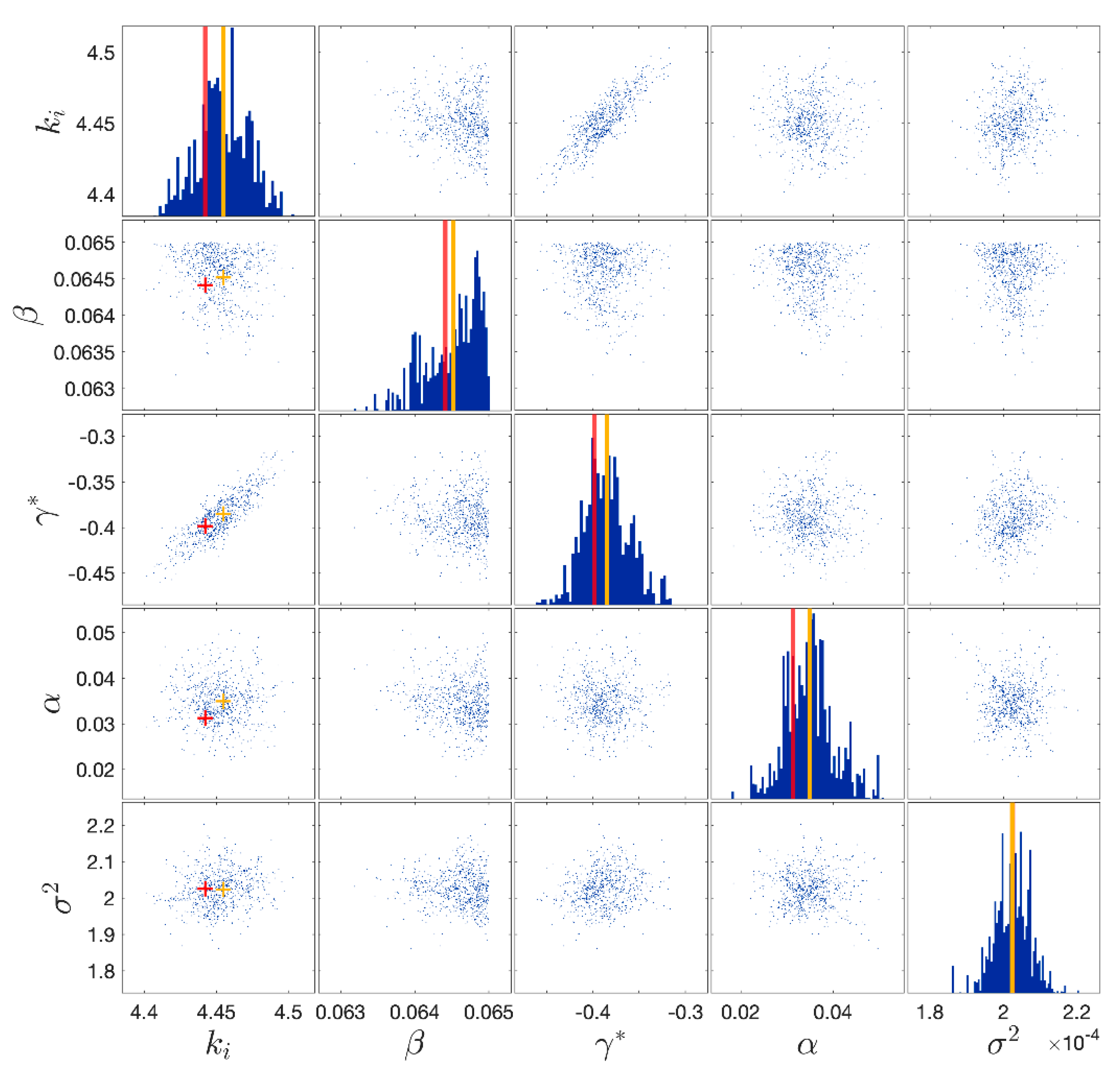
- provide the full multivariate distribution of the calibrated parameters;
- (iii)
- estimate the model discrepancy posterior distribution;
- (iv)
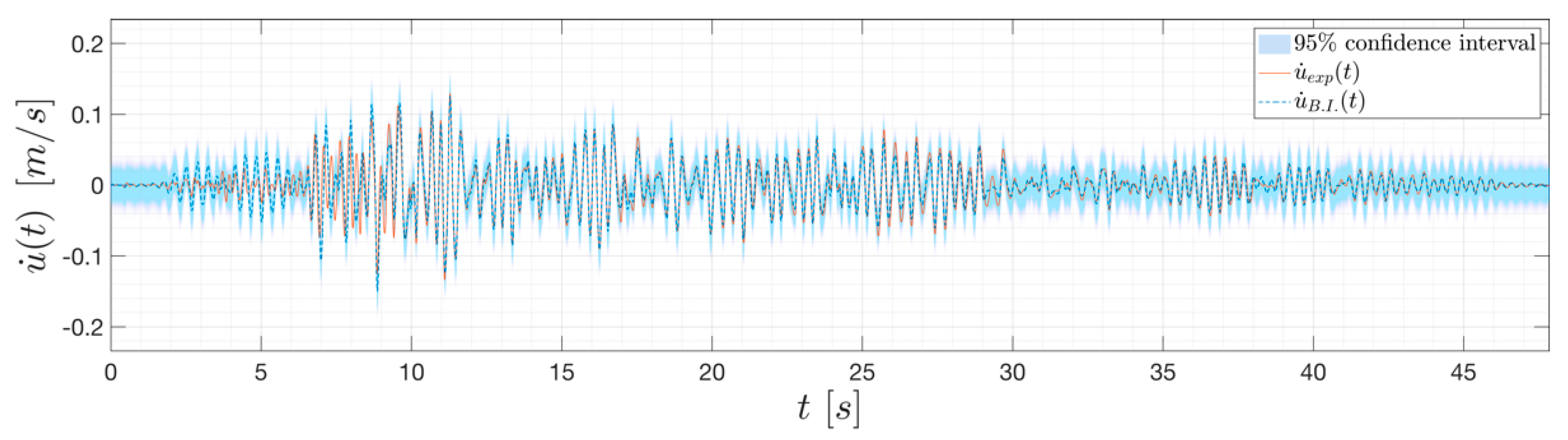
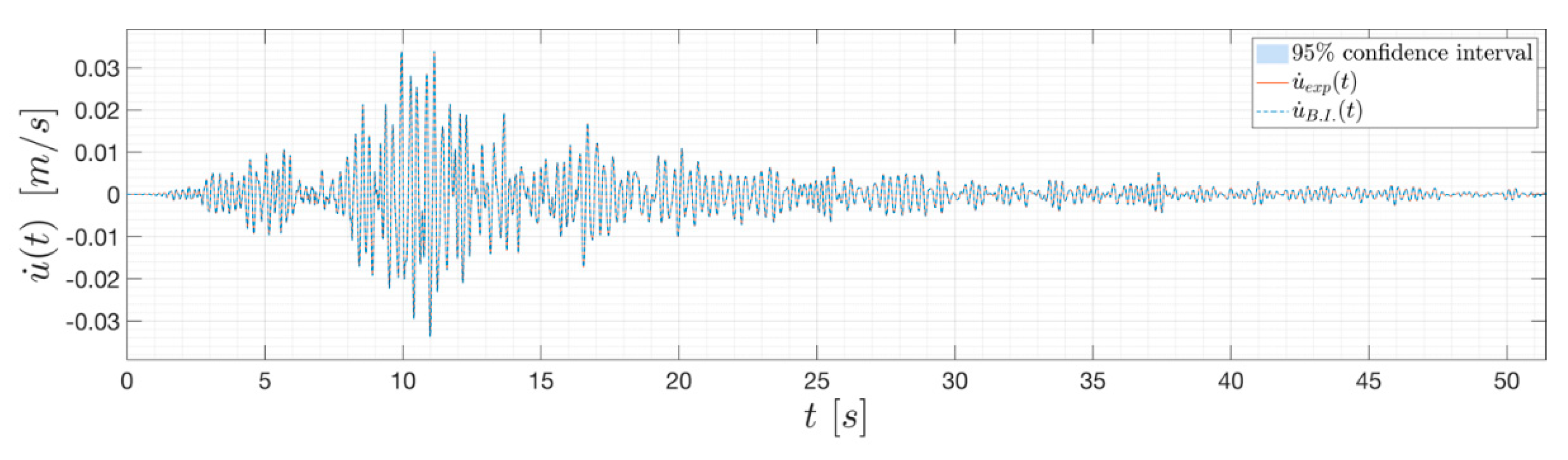
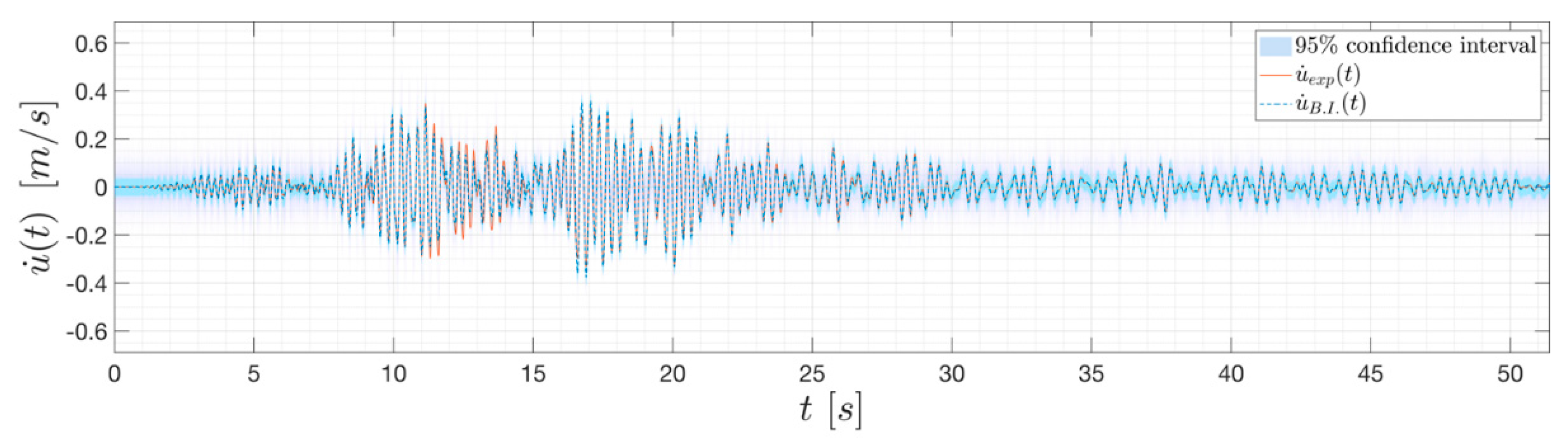
- provide insights on quantities of interest (e.g., maximum a posteriori estimates, time-history response prediction).
- (i)
- for low level of damage, and even for high levels of PGA, accurate predictions can be achieved adopting a Gaussian discrepancy term with null mean and unknown variance, which overcomes the low sensitivity of the term used to model the degradation in the response;
- (ii)
- for high levels of damage, on the contrary, the simple Gaussian discrepancy function is unable to tackle the model inaccuracy rising.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Biegler, L.; Biros, G.; Ghattas, O.; Heinkenschloss, M.; Keyes, D.; Mallick, B.; Tenorio, L.; van Bloemen Waanders, B.; Willcox, K.; Marzouk, Y. Large-Scale Inverse Problems and Quantification of Uncertainty; Wiley Online Library: Hoboken, NJ, USA, 2011; Volume 712. [Google Scholar]
- Bernagozzi, G.; Mukhopadhyay, S.; Betti, R.; Landi, L.; Diotallevi, P.P. Output-only damage detection in buildings using proportional modal flexibility-based deflections in unknown mass scenarios. Eng. Struct. 2018, 167, 549–566. [Google Scholar] [CrossRef]
- Liu, Y.; Mei, Z.; Wu, B.; Bursi, O.S.; Dai, K.-S.; Li, B. Seismic behaviour and failure-mode-prediction method of a reinforced-concrete rigid-frame bridge with thin-walled tall piers: Investigation by model-updating hybrid test. Eng. Struct. 2020, 208, 110302. [Google Scholar] [CrossRef]
- Moon, F.; Catbas, N. Structural Identification of Constructed Systems: Approaches, Methods, and Technologies for Effective Practice of St-Id; American Society of Civil Engineers (ASCE): Reston, WV, USA, 2013. [Google Scholar] [CrossRef] [Green Version]
- Beck, J.L.; Katafygiotis, L.S. Updating Models and Their Uncertainties. I: Bayesian Statistical Framework. J. Eng. Mech. 1998, 124, 455–461. [Google Scholar] [CrossRef]
- Wagner, P.-R.; Nagel, J.; Marelli, S.; Sudret, B. UQLab User Manual—Bayesian Inversion for Model Calibration and Validation; Chair of Risk, Safety and Uncertainty Quantification: ETH Zurich, Switzerland, 2019. [Google Scholar]
- Noel, J.; Kerschen, G. Nonlinear system identification in structural dynamics: 10 more years of progress. Mech. Syst. Signal Process. 2017, 83, 2–35. [Google Scholar] [CrossRef]
- Ching, J.; Beck, J.L.; Porter, K.A. Bayesian state and parameter estimation of uncertain dynamical systems. Probabilistic Eng. Mech. 2006, 21, 81–96. [Google Scholar] [CrossRef]
- Ortiz, G.A.; Alvarez, D.A.; Bedoya-Ruiz, D. Identification of Bouc–Wen type models using the Transitional Markov Chain Monte Carlo method. Comput. Struct. 2015, 146, 252–269. [Google Scholar] [CrossRef]
- Chen, H.-P.; Mehrabani, M.B. Reliability analysis and optimum maintenance of coastal flood defences using probabilistic deterioration modelling. Reliab. Eng. Syst. Saf. 2019, 185, 163–174. [Google Scholar] [CrossRef]
- Erazo, K.; Nagarajaiah, S. An offline approach for output-only Bayesian identification of stochastic nonlinear systems using unscented Kalman filtering. J. Sound Vib. 2017, 397, 222–240. [Google Scholar] [CrossRef]
- Zhou, K.; Tang, J. Uncertainty quantification in structural dynamic analysis using two-level Gaussian processes and Bayesian inference. J. Sound Vib. 2018, 412, 95–115. [Google Scholar] [CrossRef]
- Yan, G.; Sun, H. A non-negative Bayesian learning method for impact force reconstruction. J. Sound Vib. 2019, 457, 354–367. [Google Scholar] [CrossRef]
- Yan, W.-J.; Chronopoulos, D.; Papadimitriou, C.; Cantero-Chinchilla, S.; Zhu, G.-S. Bayesian inference for damage identification based on analytical probabilistic model of scattering coefficient estimators and ultrafast wave scattering simulation scheme. J. Sound Vib. 2020, 468, 115083. [Google Scholar] [CrossRef]
- Imholz, M.; Faes, M.; Vandepitte, D.; Moens, D. Robust uncertainty quantification in structural dynamics under scarse experimental modal data: A Bayesian-interval approach. J. Sound Vib. 2020, 467, 114983. [Google Scholar] [CrossRef]
- Hizal, Ç.; Turan, G. A two-stage Bayesian algorithm for finite element model updating by using ambient response data from multiple measurement setups. J. Sound Vib. 2020, 469, 115139. [Google Scholar] [CrossRef]
- Muto, M.; Beck, J.L. Bayesian Updating and Model Class Selection for Hysteretic Structural Models Using Stochastic Simulation. J. Vib. Control. 2008, 14, 7–34. [Google Scholar] [CrossRef] [Green Version]
- Wu, M.; Smyth, A.W. Application of the unscented Kalman filter for real-time nonlinear structural system identification. Struct. Control. Health Monit. 2007, 14, 971–990. [Google Scholar] [CrossRef]
- Astroza, R.; Ebrahimian, H.; Conte, J. Material Parameter Identification in Distributed Plasticity FE Models of Frame-Type Structures Using Nonlinear Stochastic Filtering. J. Eng. Mech. 2015, 141, 04014149. [Google Scholar] [CrossRef]
- Conte, J.; Astroza, R.; Ebrahimian, H. Bayesian Methods for Nonlinear System Identification of Civil Structures. In Proceedings of the MATEC Web Conference, Zürich, Switzerland, 19–21 October 2015; Volume 24, p. 03002. [Google Scholar] [CrossRef]
- Jalayer, F.; Iervolino, I.; Manfredi, G. Structural modeling uncertainties and their influence on seismic assessment of existing RC structures. Struct. Saf. 2010, 32, 220–228. [Google Scholar] [CrossRef]
- Gardoni, P.; Der Kiureghian, A.; Mosalam, K.M. Probabilistic Capacity Models and Fragility Estimates for Reinforced Concrete Columns based on Experimental Observations. J. Eng. Mech. 2002, 128, 1024–1038. [Google Scholar] [CrossRef]
- Bracchi, S.; Rota, M.; Magenes, G.; Penna, A. Seismic assessment of masonry buildings accounting for limited knowledgeon material by Bayesian updating. Bull. Earthq. Eng. 2016, 14, 2273–2297. [Google Scholar] [CrossRef]
- Ramos, L.F.; Miranda, T.; Mishra, M.; Fernandes, F.; Manning, E. A Bayesian approach for NDT data fusion: The Saint Torcato church case study. Eng. Struct. 2015, 84, 120–129. [Google Scholar] [CrossRef] [Green Version]
- Bartoli, G.; Betti, M.; Facchini, L.; Marra, A.; Monchetti, S. Bayesian model updating of historic masonry towers through dynamic experimental data. Procedia Eng. 2017, 199, 1258–1263. [Google Scholar] [CrossRef]
- Dolce, M.; Nicoletti, M.; De Sortis, A.; Marchesini, S.; Spina, D.; Talanas, F.; De Sortis, A. Osservatorio sismico delle strutture: The Italian structural seismic monitoring network. Bull. Earthq. Eng. 2015, 15, 621–641. [Google Scholar] [CrossRef] [Green Version]
- Marelli, S.; Sudret, B. UQLab: A Framework for Uncertainty Quantification in Matlab. Vulnerability Uncertain. Risk 2014, 2554–2563. [Google Scholar] [CrossRef] [Green Version]
- Goodman, J.; Weare, J. Communications in Applied Mathematics and Computational Science; Math. Sci. Publishing: Berkeley, CA, USA, 2010. [Google Scholar]
- Kyprianou, A.; Worden, K.; Panet, M. Identification Of Hysteretic Systems Using The Differential Evolution Algorithm. J. Sound Vib. 2001, 248, 289–314. [Google Scholar] [CrossRef]
- Worden, K.; Hensman, J. Parameter estimation and model selection for a class of hysteretic systems using Bayesian inference. Mech. Syst. Signal Process. 2012, 32, 153–169. [Google Scholar] [CrossRef]
- Ben Abdessalem, A.; Dervilis, N.; Wagg, D.J.; Worden, K. Model selection and parameter estimation in structural dynamics using approximate Bayesian computation. Mech. Syst. Signal Process. 2018, 99, 306–325. [Google Scholar] [CrossRef]
- Ceravolo, R.; Demarie, G.V.; Erlicher, S. Instantaneous Identification of Degrading Hysteretic Oscillators Under Earthquake Excitation. Struct. Health Monit. 2010, 9, 447–464. [Google Scholar] [CrossRef]
- Ceravolo, R.; Demarie, G.V.; Erlicher, S. Instantaneous Identification of Bouc-Wen-Type Hysteretic Systems from Seismic Response Data. Key Eng. Mater. 2007, 347, 331–338. [Google Scholar] [CrossRef] [Green Version]
- Ceravolo, R.; Demarie, G.V.; Erlicher, S. Identification of degrading hysteretic systems from seismic response data. In Proceedings of the 7th European Conference on Structural Dynamics, EURODYN 2008, Leuven, Belgium, 20–22 September 2008. [Google Scholar]
- Bouc, R. Modèle mathématique d’hystérésis: Application aux systèmes à un degré de liberté. J. Acust. 1969, 24, 16–25. [Google Scholar]
- Wen, Y.-K. Method for Random Vibration of Hysteretic Systems. J. Eng. Mech. Div. ASCE 1976, 102, 249–263. [Google Scholar]
- Baber, T.T.; Noori, M. Random Vibration of Degrading, Pinching Systems. J. Eng. Mech. 1985, 111, 1010–1026. [Google Scholar] [CrossRef]
- Ma, F.; Zhang, H.; Bockstedte, A.; Foliente, G.; Paevere, P. Parameter Analysis of the Differential Model of Hysteresis. J. Appl. Mech. 2004, 71, 342–349. [Google Scholar] [CrossRef]
- Erlicher, S.; Bursi, O.S. Bouc–Wen-Type Models with Stiffness Degradation: Thermodynamic Analysis and Applications. J. Eng. Mech. 2008, 134, 843–855. [Google Scholar] [CrossRef] [Green Version]
- Ikhouane, F.; Rodellar, J. Systems with Hysteresis; John Wiley & Sons, Ltd.: West Sussex, UK, 2007. [Google Scholar]
- Bursi, O.S.; Ceravolo, R.; Erlicher, S.; Fragonara, L.Z. Identification of the hysteretic behaviour of a partial-strength steel-concrete moment-resisting frame structure subject to pseudodynamic tests. Earthq. Eng. Struct. Dyn. 2012, 41, 1883–1903. [Google Scholar] [CrossRef]
- Ceravolo, R.; Erlicher, S.; Fragonara, L.Z. Comparison of restoring force models for the identification of structures with hysteresis and degradation. J. Sound Vib. 2013, 332, 6982–6999. [Google Scholar] [CrossRef]
- Miraglia, G.; Lenticchia, E.; Surace, C.; Ceravolo, R. Seismic damage identification by fitting the nonlinear and hysteretic dynamic response of monitored buildings. J. Civ. Struct. Health Monit. 2020, 10, 457–469. [Google Scholar] [CrossRef]
- Cattari, S.; Degli Abbati, S.; Ottonelli, D.; Marano, C.; Camata, G.; Spacone, E.; Da Porto, F.; Modena, C.; Lorenzoni, F.; Magenes, G.; et al. Discussion on data recorded by the italian structural seismic monitoring network on three masonry structures hit by the 2016-2017 central italy earthquake. Proc. COMPDYN 2019, 1, 1889–1906. [Google Scholar]
- Colombo, A.; Negro, P. A damage index of generalised applicability. Eng. Struct. 2005, 27, 1164–1174. [Google Scholar] [CrossRef]
- Deng, J.; Gu, D. On a statistical damage constitutive model for rock materials. Comput. Geosci. 2011, 37, 122–128. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 7.6 | 1 | 0 | 2.43 | 6.5 |
| Parameter | Distribution | Support | Mean | Std. Dev. |
|---|---|---|---|---|
| Gaussian | ||||
| Uniform | ||||
| Uniform | ||||
| Lognormal |
| Parameter | Mean | Std. dev. | (0.05–0.95) Quant. | MAP |
|---|---|---|---|---|
| 4.5 | (4.4–4.5) | 4.4 | ||
| 0.25 | ||||
| 0.035 | (0.027–0.044) | 0.031 | ||
| Parameter | Value |
|---|---|
| 5.735 × 108 | |
| 35.01 | |
| −16.68 | |
| N | 1 |
| 1.812 × 10−6 | |
| 573,459 |
| Parameter | Distribution | Support | Mean | Std. Dev. |
|---|---|---|---|---|
| Lognormal | ||||
| Uniform | ||||
| Uniform | ||||
| Uniform | ||||
| Uniform |
| Parameter | Mean | Std. Dev. | (0.05–0.95) Quant. | MAP |
|---|---|---|---|---|
| 0.007 | ||||
| 0.98 | (0.96–1) | 1 | ||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ceravolo, R.; Faraci, A.; Miraglia, G. Bayesian Calibration of Hysteretic Parameters with Consideration of the Model Discrepancy for Use in Seismic Structural Health Monitoring. Appl. Sci. 2020, 10, 5813. https://doi.org/10.3390/app10175813
Ceravolo R, Faraci A, Miraglia G. Bayesian Calibration of Hysteretic Parameters with Consideration of the Model Discrepancy for Use in Seismic Structural Health Monitoring. Applied Sciences. 2020; 10(17):5813. https://doi.org/10.3390/app10175813
Chicago/Turabian StyleCeravolo, Rosario, Alessio Faraci, and Gaetano Miraglia. 2020. "Bayesian Calibration of Hysteretic Parameters with Consideration of the Model Discrepancy for Use in Seismic Structural Health Monitoring" Applied Sciences 10, no. 17: 5813. https://doi.org/10.3390/app10175813
APA StyleCeravolo, R., Faraci, A., & Miraglia, G. (2020). Bayesian Calibration of Hysteretic Parameters with Consideration of the Model Discrepancy for Use in Seismic Structural Health Monitoring. Applied Sciences, 10(17), 5813. https://doi.org/10.3390/app10175813