Design and Performance Analysis for the Low-Power Holding Mechanism of the All-Electric Subsea Gate Valve Actuator

 ,
,
Abstract
:1. Introduction
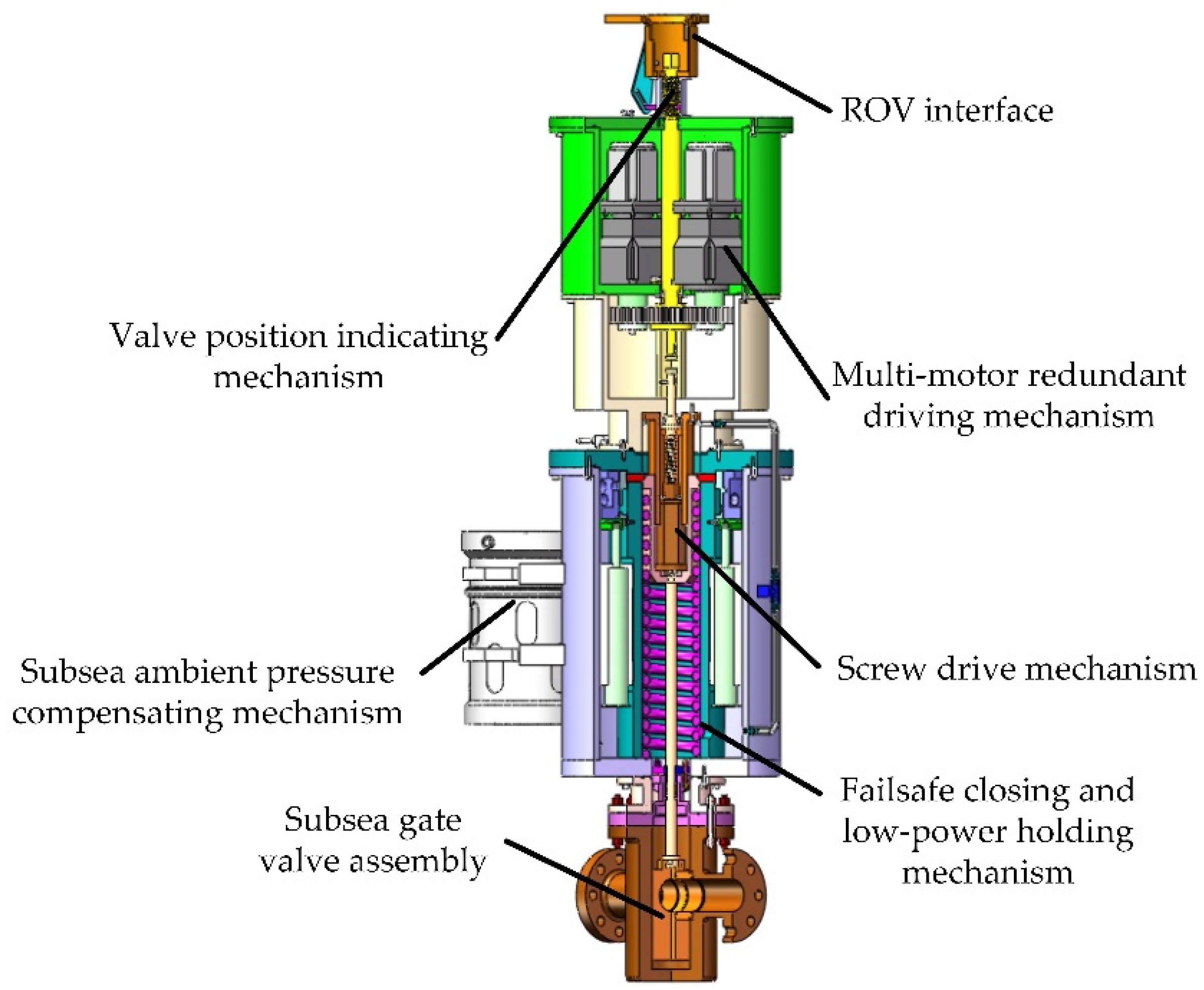
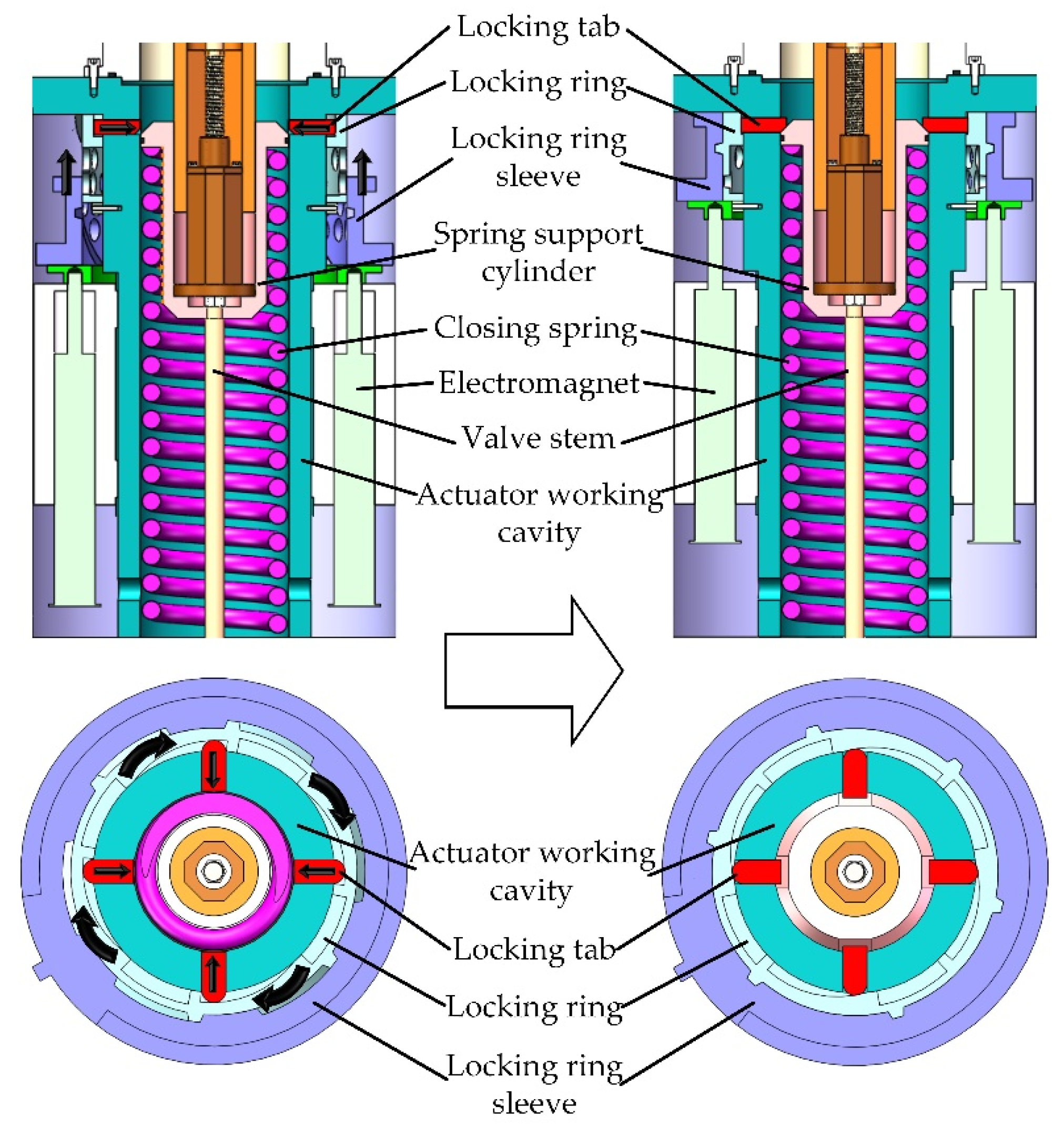
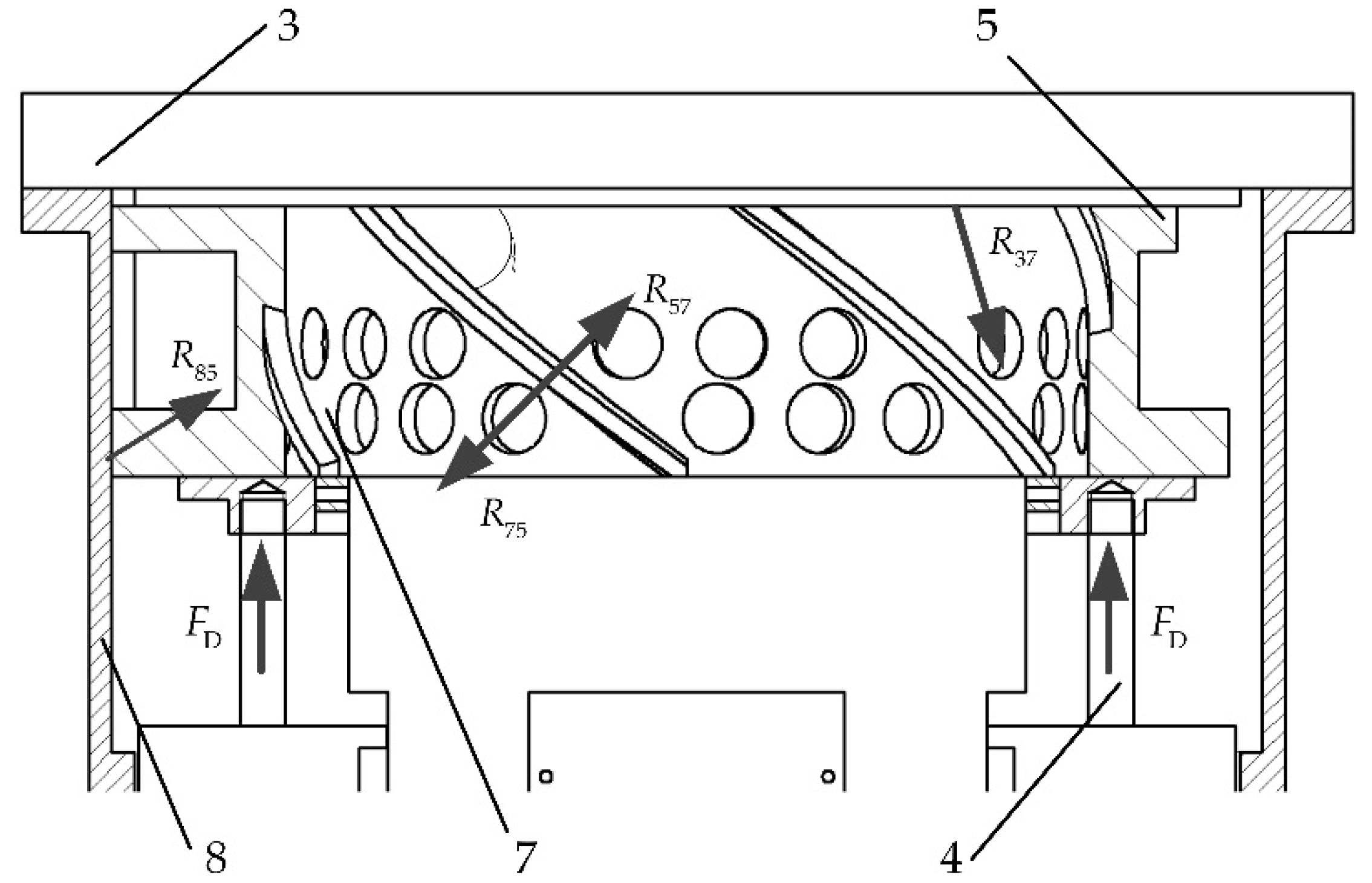
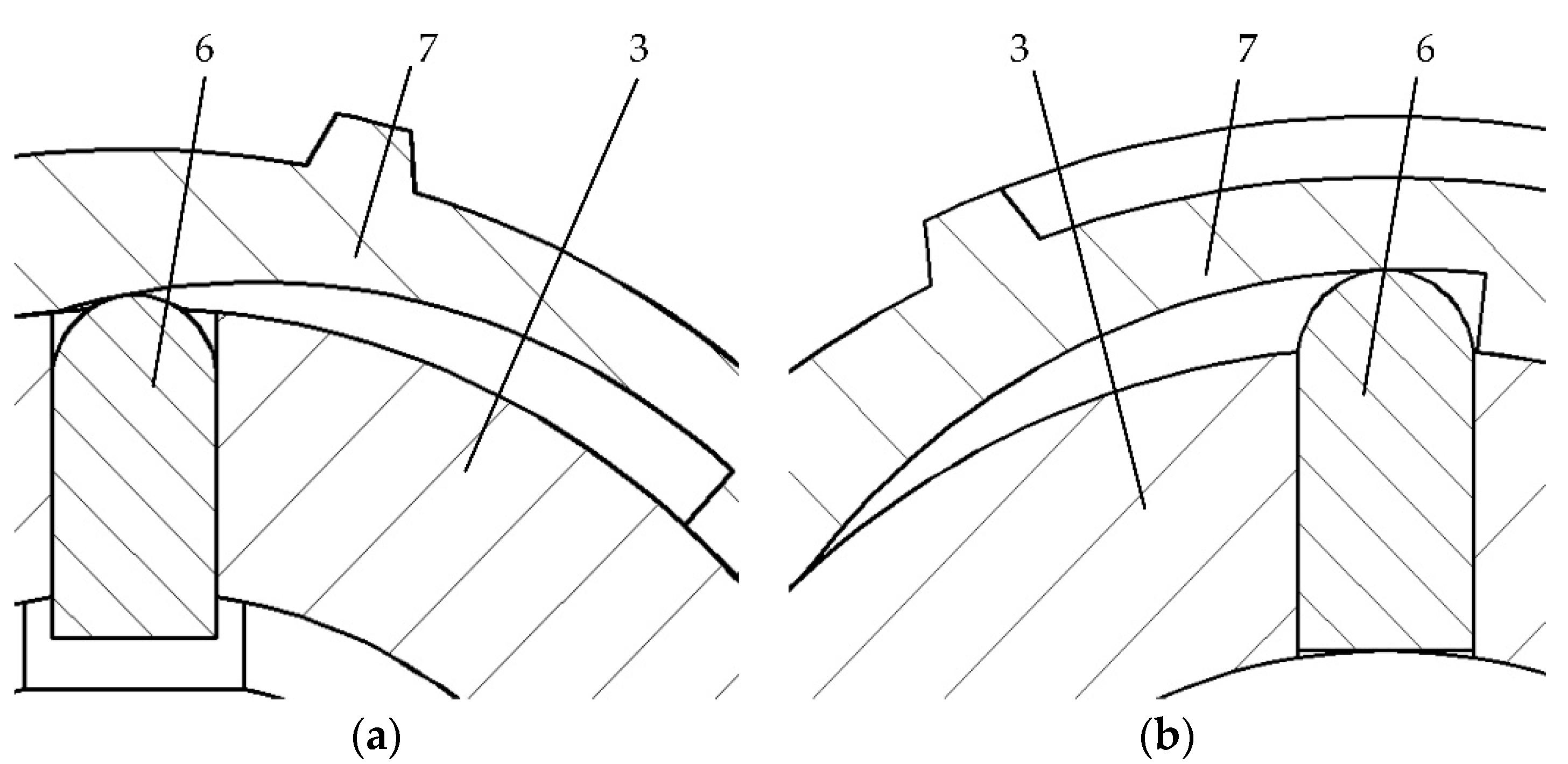
2. Research on the Configuration of Failsafe Closing and Low-Power Holding Mechanism
3. Mechanical Model and Kinematic Analysis of the Low-Power Holding Mechanism
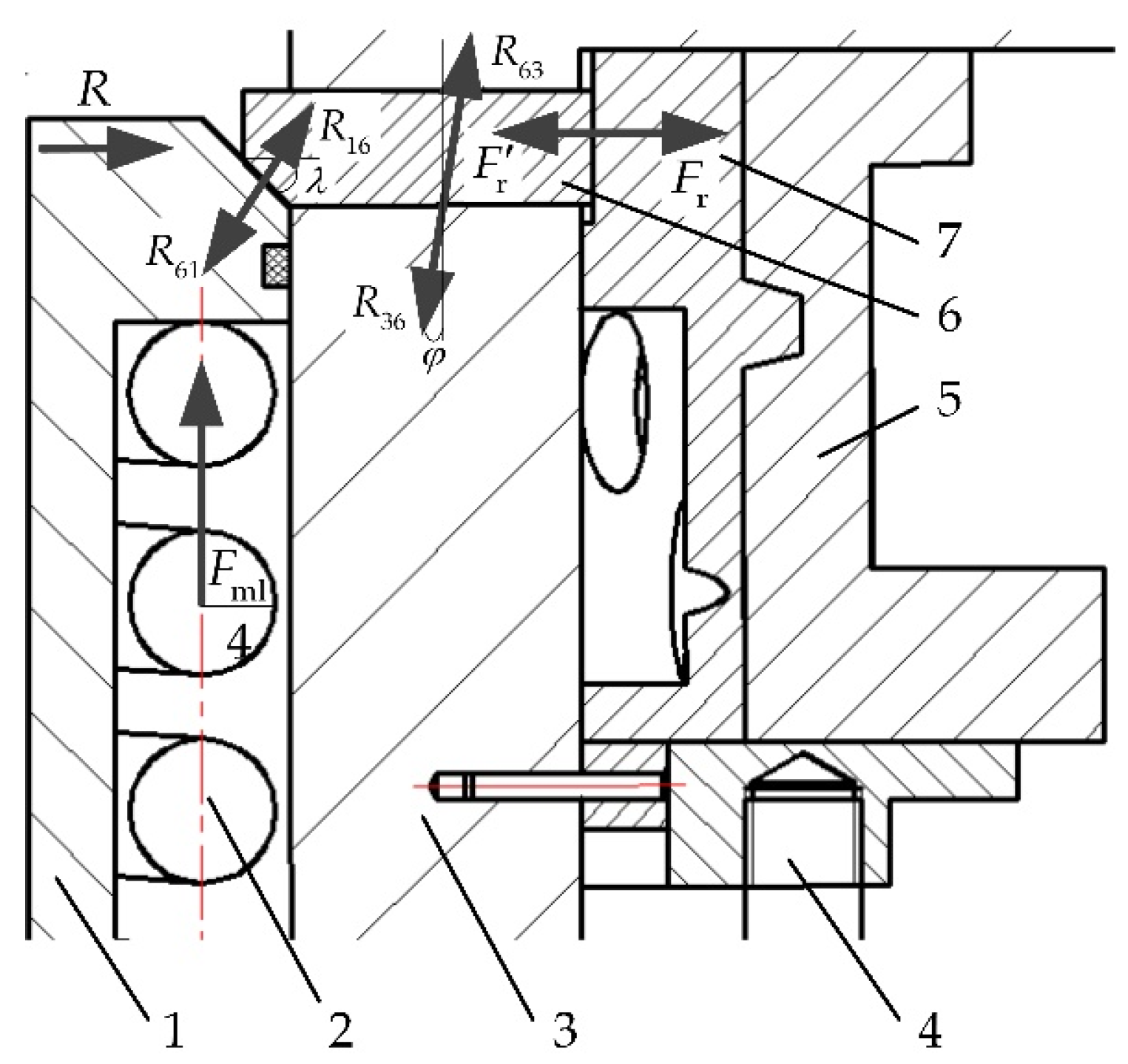
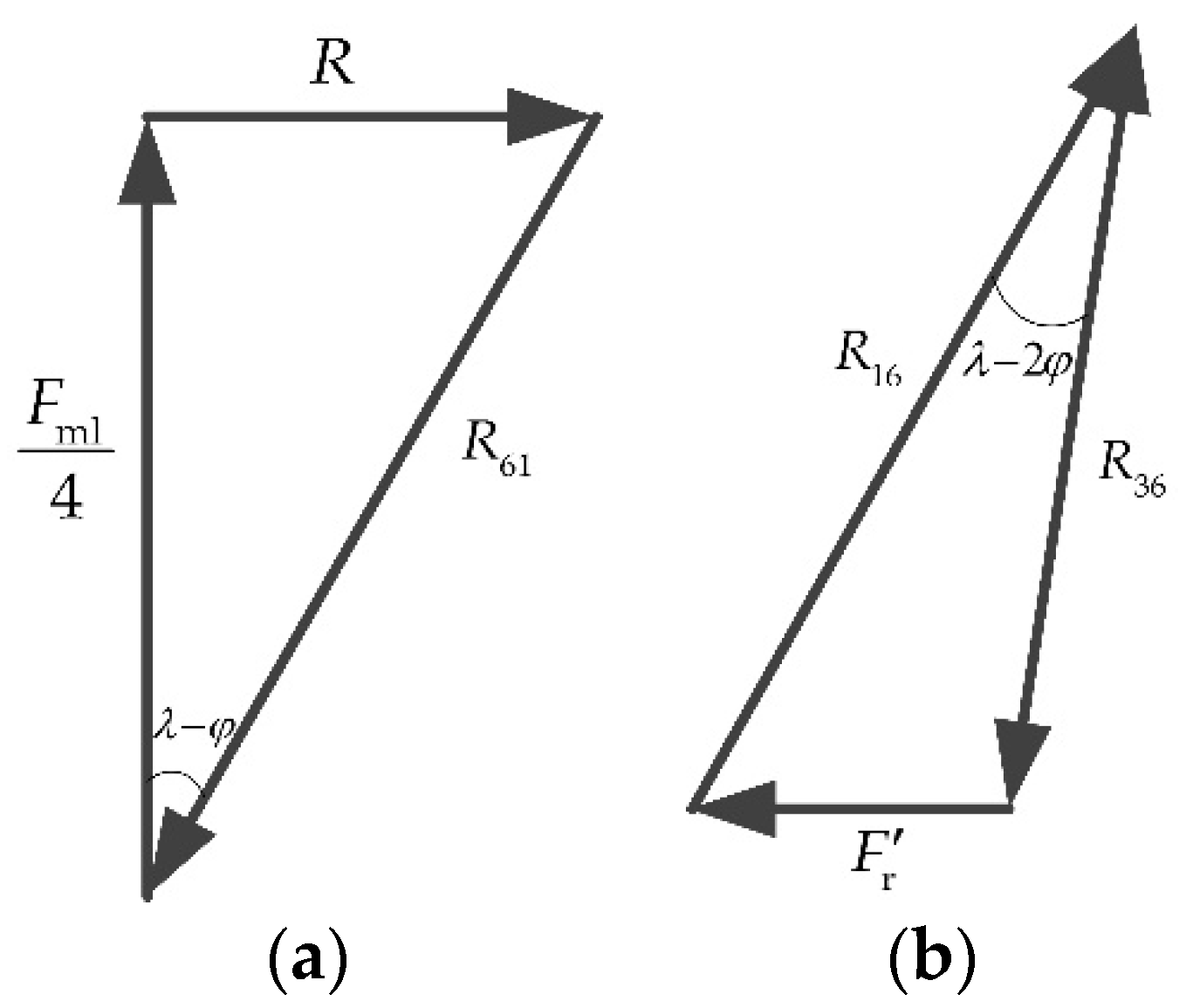
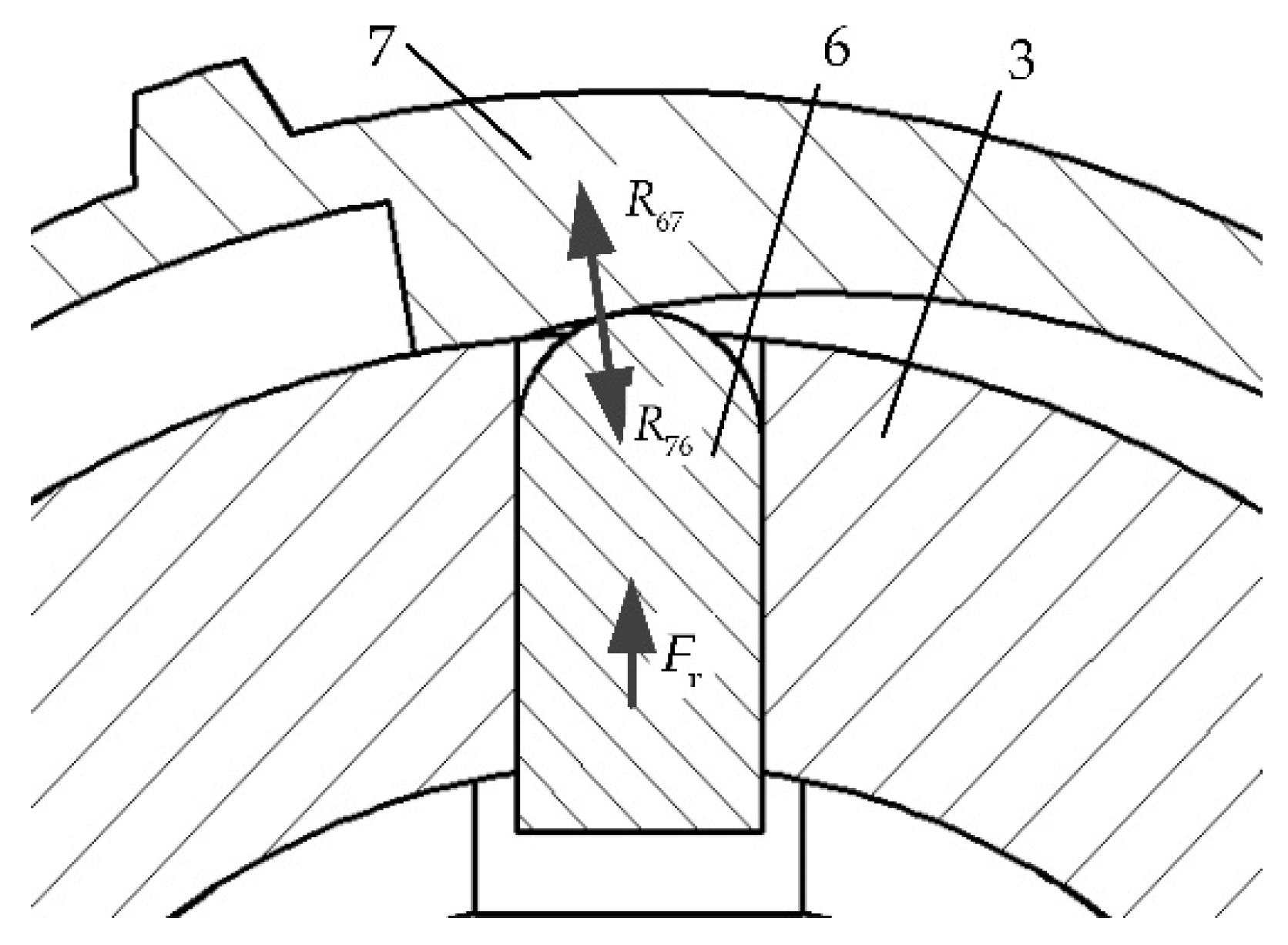
3.1. Mechanical Model of the Low-Power Holding Mechanism
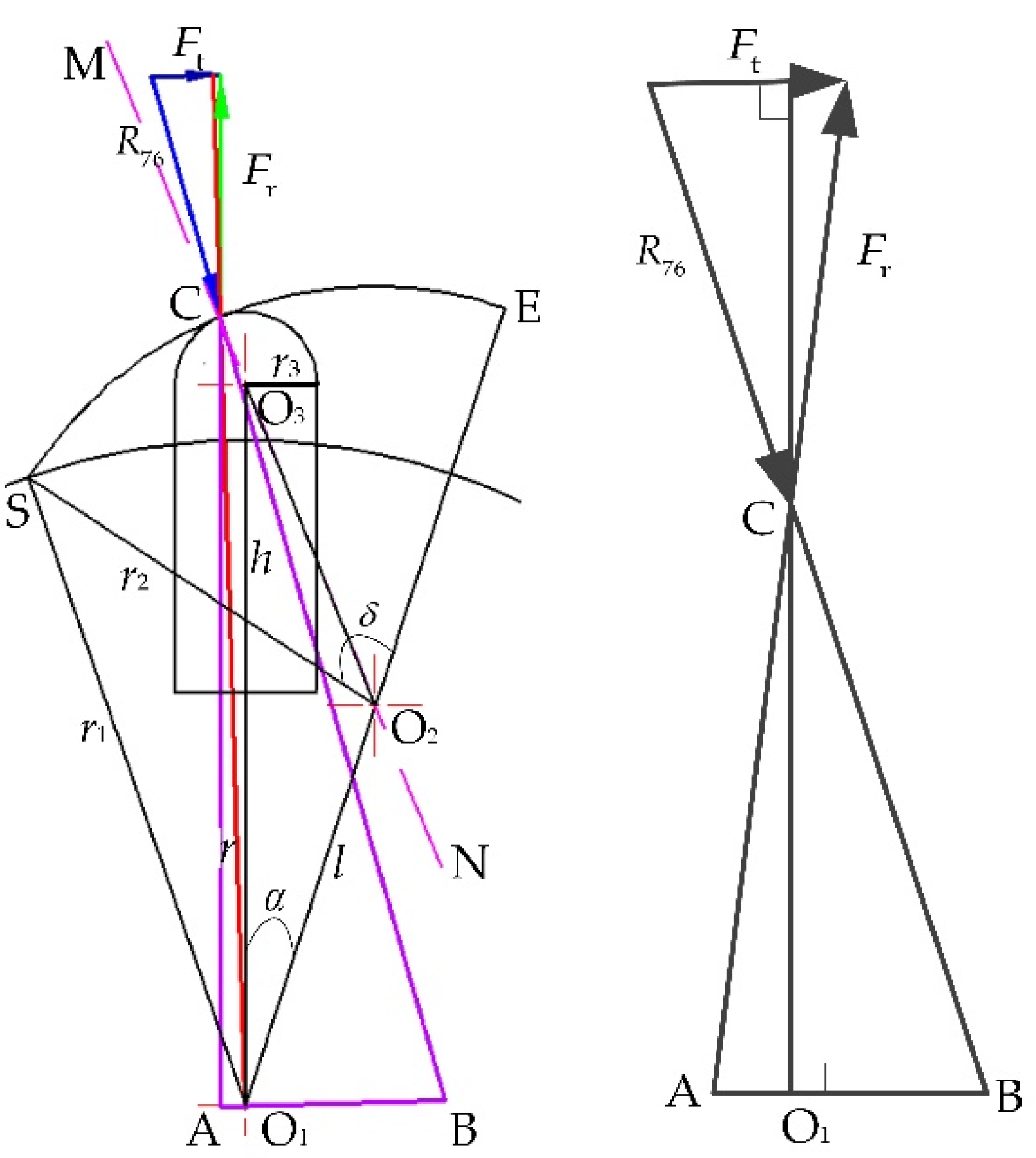
3.2. Kinematic Analysis of the Low-Power Holding Mechanism
4. Numerical Analysis and Discussion
4.1. Parameter Effects
4.2. Sensitivity Analysis
4.3. Analysis
5. Conclusions
- The proposed low-power holding mechanism is driven by the electromagnet and combines spiral transmission and cam-like transmission to convert the axial force of the closing spring into circumferential force to minimize the output force required as well as the number of the actuator’s control cables, to improve the reliability and feasibility of the holding mechanism. The proposed low-power holding mechanism only requires a holding force of approximately 2%~7% of the maximum load of the closing spring to keep the valve open.
- With a given output force of the electromagnet, the lockable maximum load the low-power holding mechanism can be increased by increasing r2 or decreasing r3, l and α. In the design space, the variable sensitivities of the lockable maximum load increases with the increase in r2 or the decrease in r3, l and α; the lockable maximum load is most sensitive to l and after that come α, r2 and r3 with regard to the average sensitivities in the design space.
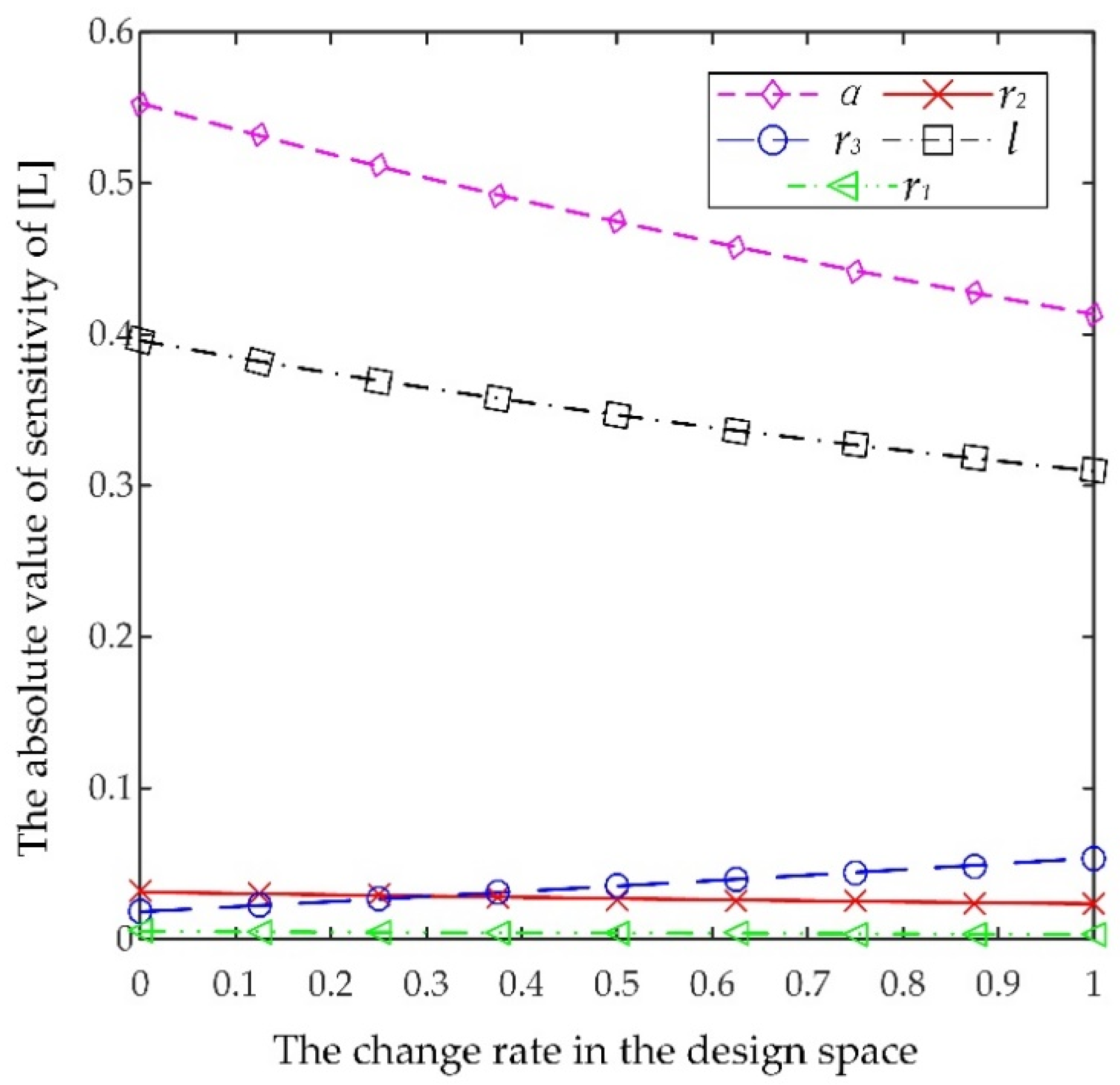
- The permissible stroke of the locking tab increases with the increase in r1, l and α or the decrease in r2 and r3. In the design space, the variable sensitivities of the permissible stroke increase with the increase in r3 or the decrease in r2, l and α; the sensitivity of the permissible stroke to r1 remains on the lowest level in the full range; with regard to the average sensitivities of the permissible stroke, the most sensitive variable is α and after that l, r3, r2 and r1.
- The design criterion is that the working stroke of the locking tab L should not exceed the permissible stroke of the locking tab [L]. The parameters can be adjusted to satisfy the criterion considering the variable sensitivities meanwhile minimizing the effect on the lockable maximum load. In the given case, the final parameter set of the low-power holding mechanism is: r1 = 150 mm, r2 = 150 mm, r3 = 10 mm, l = 30 mm and α = 39.31°, with a lockable maximum load of the closing spring of 71.44 kN.
Author Contributions
Funding
Conflicts of Interest
References
- Winther-Larssen, E.; Massie, D.; Eriksson, K.G. Subsea all electric technology: Enabling next generation field development. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 2–5 May 2016. [Google Scholar] [CrossRef]
- Wilson, A. All-electric subsea well brings benefits vs. traditional hydraulic technology. J. Petrol. Technol. 2018, 70, 65–66. [Google Scholar] [CrossRef]
- Beckman, J. All-electric subsea controls strengthen security of K5 operations. Offshore 2008, 68, 42–44. [Google Scholar]
- Akker, J.V.D.; Burdick, J. All-electric actuated subsea system qualified, implemented. Oil Gas J. 2008, 106, 44–50. [Google Scholar]
- Akker, J.V.D.; Burdick, J. All-electric subsea production system brings advantages in ultra deepwater, long step-outs. Offshore 2008, 68, 136–141. [Google Scholar]
- Abicht, D.; Akker, J.V.D. The 2nd generation DC all-electric subsea production control system. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 2–5 May 2011. [Google Scholar] [CrossRef]
- Jia, Y.; Zhao, H. All-electric subsea production control system. Appl. Mech. Mater. 2013, 251, 196–200. [Google Scholar] [CrossRef]
- Rokne, Ø. Deepwater developments can benefit from all-electric controls. Offshore 2013, 7, 108–109. [Google Scholar]
- Schwerdtfeger, T.; Scott, B.; Akker, J.V.D. World-first all-electric subsea well. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 1–4 May 2017. [Google Scholar] [CrossRef]
- Monteverde, C.; Novello, M.; Kristiansen, K. A new all electric subsea control system development. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 6–9 May 2019. [Google Scholar] [CrossRef]
- Oh, J.S.; Kang, S.R. Merits of all-electric subsea production control system. J. Korean Soc. Mar. Eng. 2014, 38, 162–168. [Google Scholar] [CrossRef]
- Fan, Y. Investigation of all-electric subsea control system. Ocean Eng. Equip. Technol. 2018, 5, 108–112. [Google Scholar] [CrossRef]
- Abicht, D.; Halvorsen, G.R.; Ramberg, R.M. Subsea all-electric. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 1–4 May 2017. [Google Scholar] [CrossRef]
- Pimentel, J.; Mackenzie, R.; Thibaut, E.; Garnaud, F. Seamlessly integrated subsea all-electric systems: Laggan-tormore as a case study. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 1–4 May 2017. [Google Scholar] [CrossRef]
- Winther-Larssen, E.; Massie, D. All-electric as an enabler for more cost effective developments on cluster systems. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 1–4 May 2017. [Google Scholar] [CrossRef]
- Orth, A.; Hendrix, G. An electro-mechanical actuator with hydrostatic drive for subsea trees to reduce CAPEX and OPEX with higher reliability and safety levels. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 30 April–3 May 2018. [Google Scholar] [CrossRef]
- Elgsaas, K.M.; Hjertvikrem, T.; Hua, W.; Tryti, S.; Glomsaker, T. All-electric subsea systems—Intelligence on demand. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 30 April–3 May 2018. [Google Scholar] [CrossRef]
- Elgsaas, K.M.; Hjertvikrem, T.; Hua, W.; Tryti, S.; Glomsaker, T. All-electric subsea systems deliver intelligence on demand: Data-driven approach to condition-based maintenance. Offshore 2018, 78, 43–47. [Google Scholar]
- Hasan, Z.; Kapetanic, N.; Vaughan, J.; Robinson, G.M. Subsea field development optimization using all electric controls as an alternative to conventional electro-hydraulic. In Proceedings of the SPE/IATMI Asia Pacific Oil & Gas Conference and Exhibition, Nusa Dua, Bali, Indonesia, 20–22 October 2015. [Google Scholar] [CrossRef]
- Zuo, X.; Yue, Y.; Duan, Y.; Guo, L. An overview of subsea production control system. Ocean Eng. Equip. Technol. 2016, 3, 58–66. [Google Scholar] [CrossRef]
- Li, Z.; Jia, P.; Wang, H.; Zhang, N.; Wang, L. Development trend and active research areas of subsea production system. J. Harbin Eng. Univ. 2019, 40, 944–952. [Google Scholar] [CrossRef]
- Xiao, X.; Zhao, H.; Wang, Y.; Peng, F.; Duan, M.; Yan, J.; Fan, X. Optimization design of coaxial parallel double spring of subsea valve actuator. Oil Field Equip. 2014, 43, 29–33. [Google Scholar] [CrossRef]
- Yan, D.; Zhang, J.; Wang, P.; Feng, S. Design for a valve driver of subsea production system. Machinery 2017, 55, 13–15. [Google Scholar] [CrossRef]
- Wang, X.; Liu, P.; Jia, P.; Zhang, L.; Wang, H.; Wang, S. Design of an all-electric subsea valve actuator and the strategy for multi-motor synchronous control. China Offshore Oil Gas 2017, 29, 149–156. [Google Scholar] [CrossRef]
- Liu, P.; Liu, Y.; Wei, X.; Xin, C.; Sun, Q.; Wu, X. Performance analysis and optimal design based on dynamic characteristics for pressure compensated subsea all-electric valve actuator. Ocean Eng. 2019, 191, 106568. [Google Scholar] [CrossRef]
- Winther-Larssen, E. Design of an Electric X-mas Tree Gate Valve Actuator. Master’s Thesis, Norwegian University of Science and Technology, Trondheim, Norway, June 2007. [Google Scholar]
- Berven, J. Subsea Production Control Systems for All-Electric X-mas Trees. Master’s Thesis, University of Stavanger, Stavanger, Norway, June 2013. [Google Scholar]
- Xiao, Y.; Wu, D.; Xiang, C.; Li, S. Design of production gate valve and actuator for subsea all-electric Christmas tree. China Petrol. Mach. 2018, 46, 60–64. [Google Scholar] [CrossRef]
- Tareen, W.U.; Mekhilef, S. Transformer-less 3P3W SAPF (three-phase three-wire shunt active power filter) with line-interactive UPS (uninterruptible power supply) and battery energy storage stage. Energy 2016, 109, 525–536. [Google Scholar] [CrossRef]
- Stropnik, R.; Sekavčnik, M.; Ferriz, A.M.; Mori, M. Reducing environmental impacts of the ups system based on PEM fuel cell with circular economy. Energy 2018, 165, 824–835. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Description | Symbol |
|---|---|
| Radius of the actuator working cavity | r1 |
| Radius of the notch of the locking ring | r2 |
| Radius of the locking tab | r3 |
| Center distance between the actuator working cavity and the locking ring notch (|O1O2|) | l |
| Radial deflection angle of the center of the locking ring notch (∠O2O1O3) | α |
| Parameter Description | Symbol |
|---|---|
| Center distance between the actuator working cavity and the locking tab (|O1O3|) | h |
| Distance between the center of the actuator working cavity and the contact point C (|O1C|) | r |
| Design Variable Description | Variable | Variable Range |
|---|---|---|
| Radius of the actuator working cavity | r1 | 130~150 mm |
| Radius of the notch of the locking ring | r2 | 130~150 mm |
| Radius of the locking tab | r3 | 10~20 mm |
| Center distance between the actuator working cavity and the locking ring notch | l | 30~40 mm |
| Radial deflection angle of the center of the locking ring notch | α | 35~45° |
| Design Variable Description | Variable | Average Sensitivity |
|---|---|---|
| Radius of the notch of the locking ring | r2 | 0.5027 |
| Radius of the locking tab | r3 | 0.2583 |
| Center distance between the actuator working cavity and the locking ring notch | l | 0.7852 |
| Radial deflection angle of the center of the locking ring notch | α | 0.5403 |
| Design Variable Description | Variable | Average Sensitivity |
|---|---|---|
| Radius of the actuator working cavity | r1 | 0.0042 |
| Radius of the notch of the locking ring | r2 | 0.0271 |
| Radius of the locking tab | r3 | 0.0355 |
| Center distance between the actuator working cavity and the locking ring notch | l | 0.3488 |
| Radial deflection angle of the center of the locking ring notch | α | 0.4775 |
| Parameter Description | Symbol | Optimal Solution |
|---|---|---|
| Radius of the actuator working cavity | r1 | 150 mm |
| Radius of the notch of the locking ring | r2 | 150 mm |
| Radius of the locking tab | r3 | 10 mm |
| Center distance between the actuator working cavity and the locking ring notch | l | 30 mm |
| Radial deflection angle of the center of the locking ring notch | α | 39.31° |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Jia, P.; Wang, L.; Yun, F.; Wang, G.; Zhang, A.; Xu, M.; Wang, X. Design and Performance Analysis for the Low-Power Holding Mechanism of the All-Electric Subsea Gate Valve Actuator. Appl. Sci. 2020, 10, 6119. https://doi.org/10.3390/app10176119
Wang H, Jia P, Wang L, Yun F, Wang G, Zhang A, Xu M, Wang X. Design and Performance Analysis for the Low-Power Holding Mechanism of the All-Electric Subsea Gate Valve Actuator. Applied Sciences. 2020; 10(17):6119. https://doi.org/10.3390/app10176119
Chicago/Turabian StyleWang, Honghai, Peng Jia, Liquan Wang, Feihong Yun, Gang Wang, Aiguo Zhang, Min Xu, and Xiangyu Wang. 2020. "Design and Performance Analysis for the Low-Power Holding Mechanism of the All-Electric Subsea Gate Valve Actuator" Applied Sciences 10, no. 17: 6119. https://doi.org/10.3390/app10176119
APA StyleWang, H., Jia, P., Wang, L., Yun, F., Wang, G., Zhang, A., Xu, M., & Wang, X. (2020). Design and Performance Analysis for the Low-Power Holding Mechanism of the All-Electric Subsea Gate Valve Actuator. Applied Sciences, 10(17), 6119. https://doi.org/10.3390/app10176119