Microseismic Signal Denoising and Separation Based on Fully Convolutional Encoder–Decoder Network




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
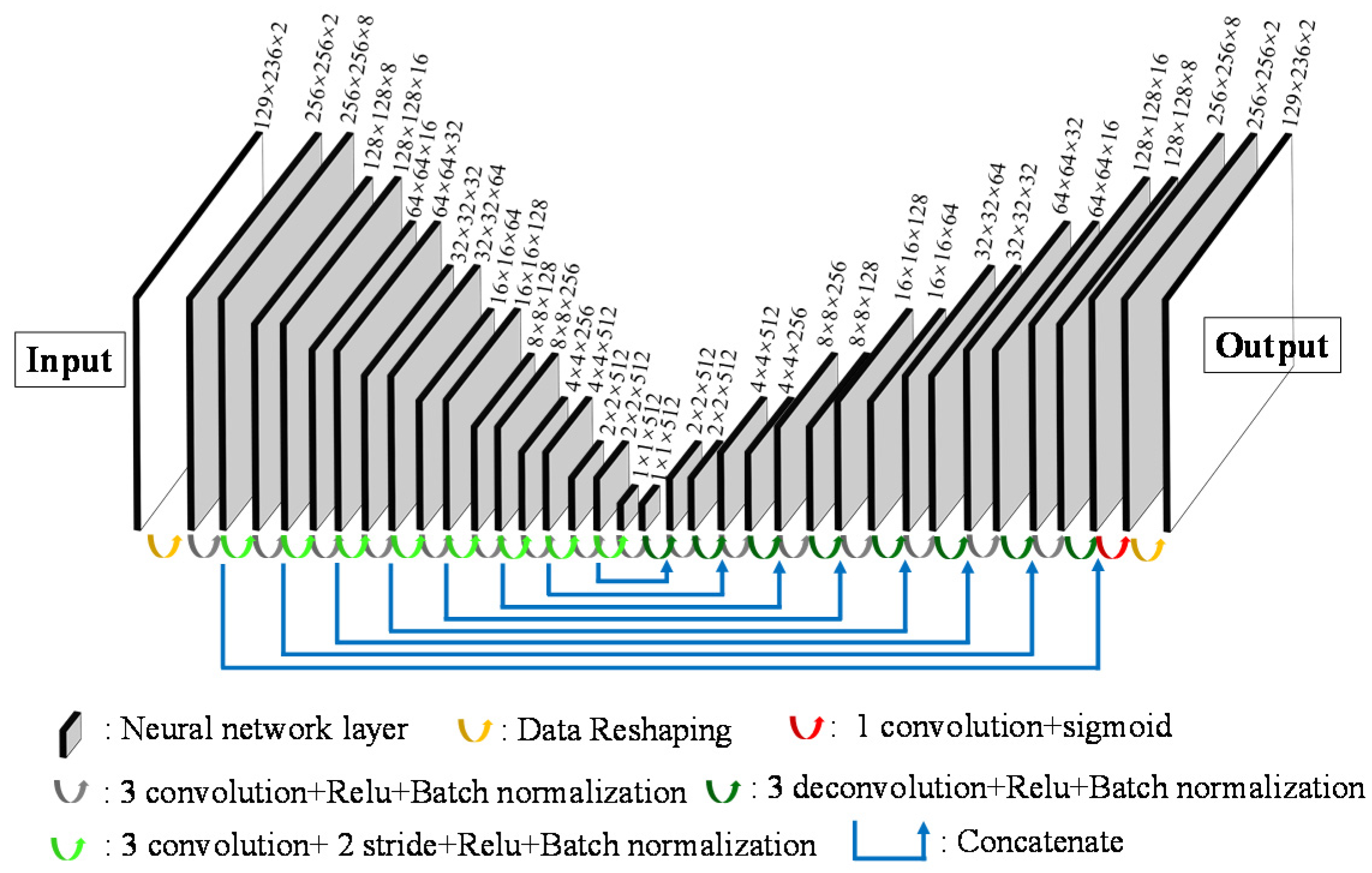
2. Methods and Network Training
2.1. Methods
2.2. Data Preparation and Network Training
3. Results
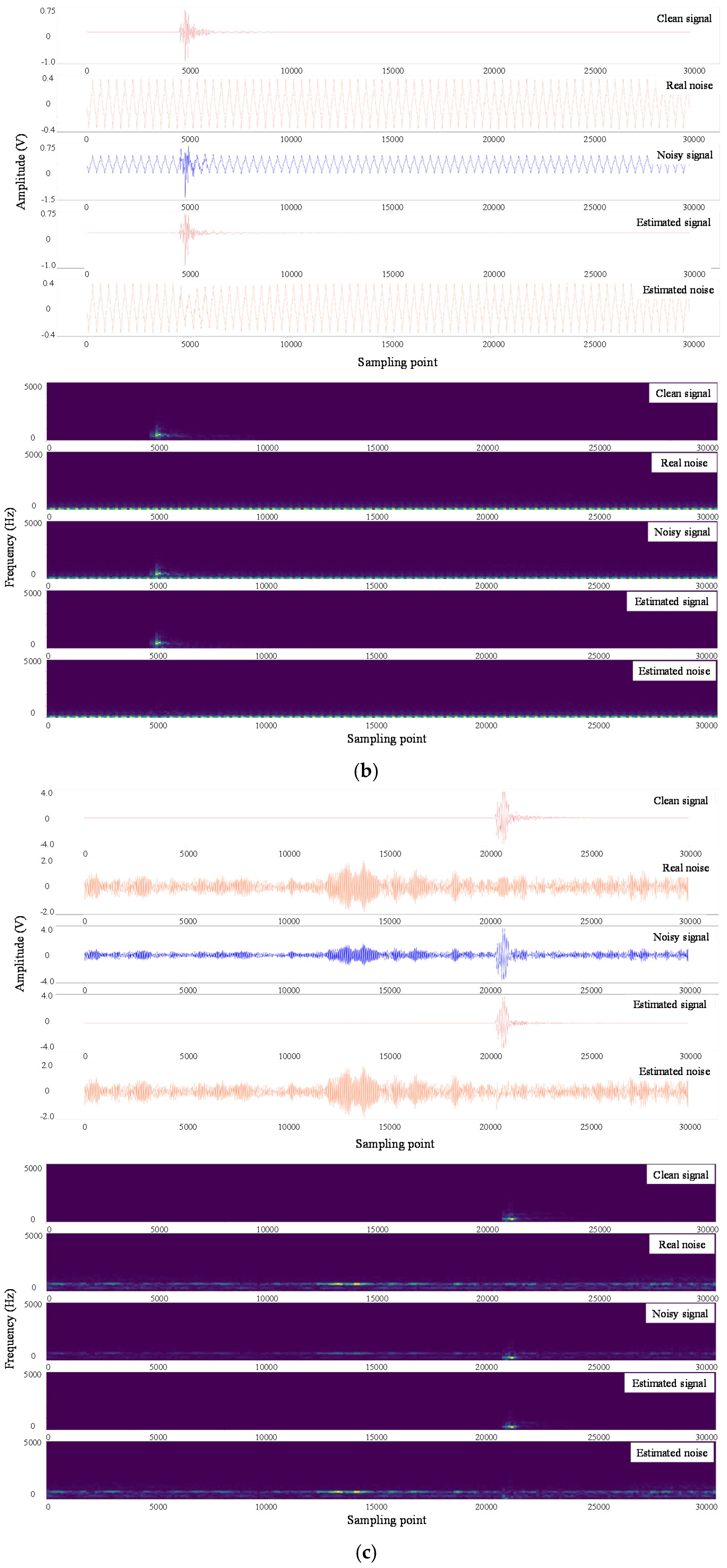
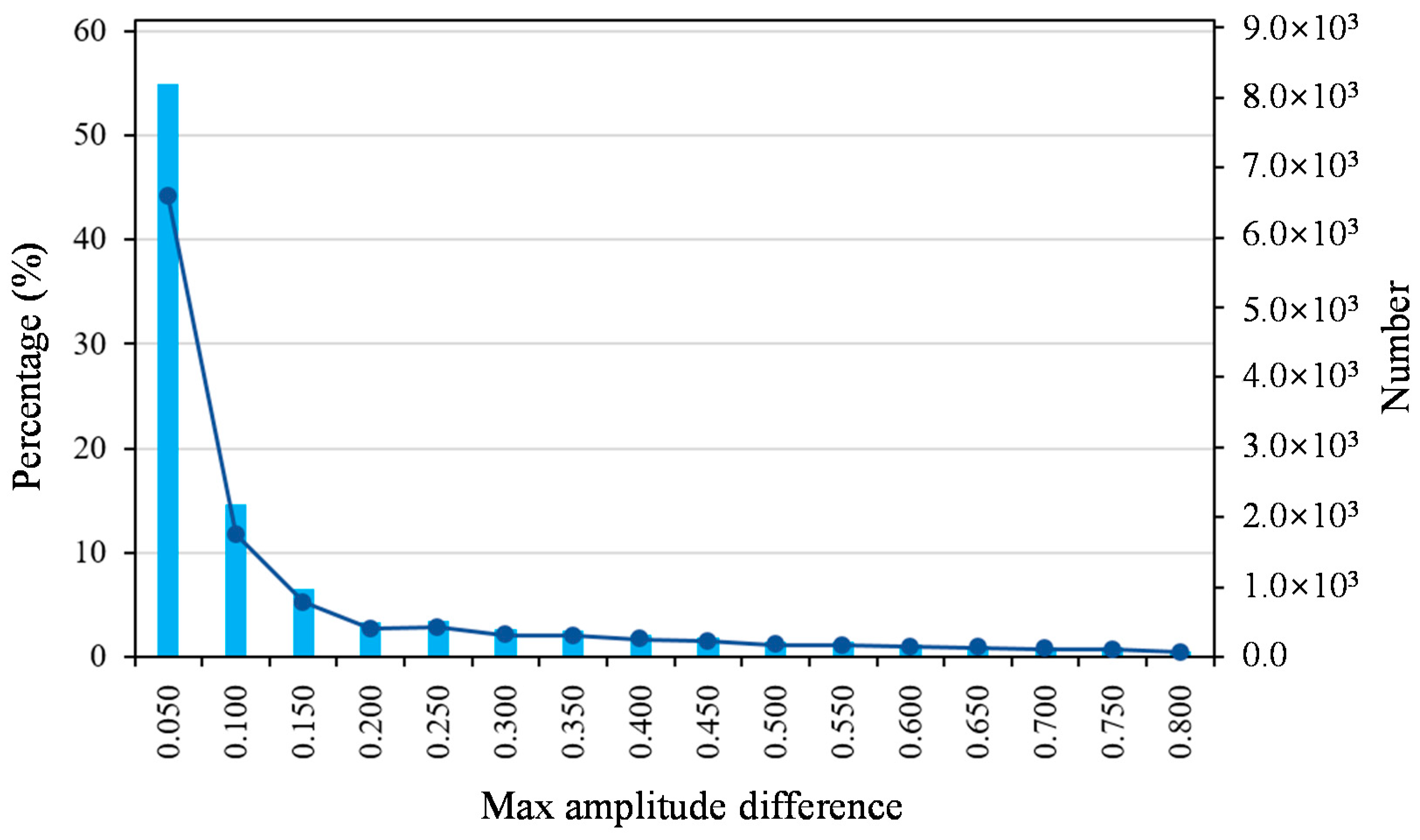
3.1. Test Results
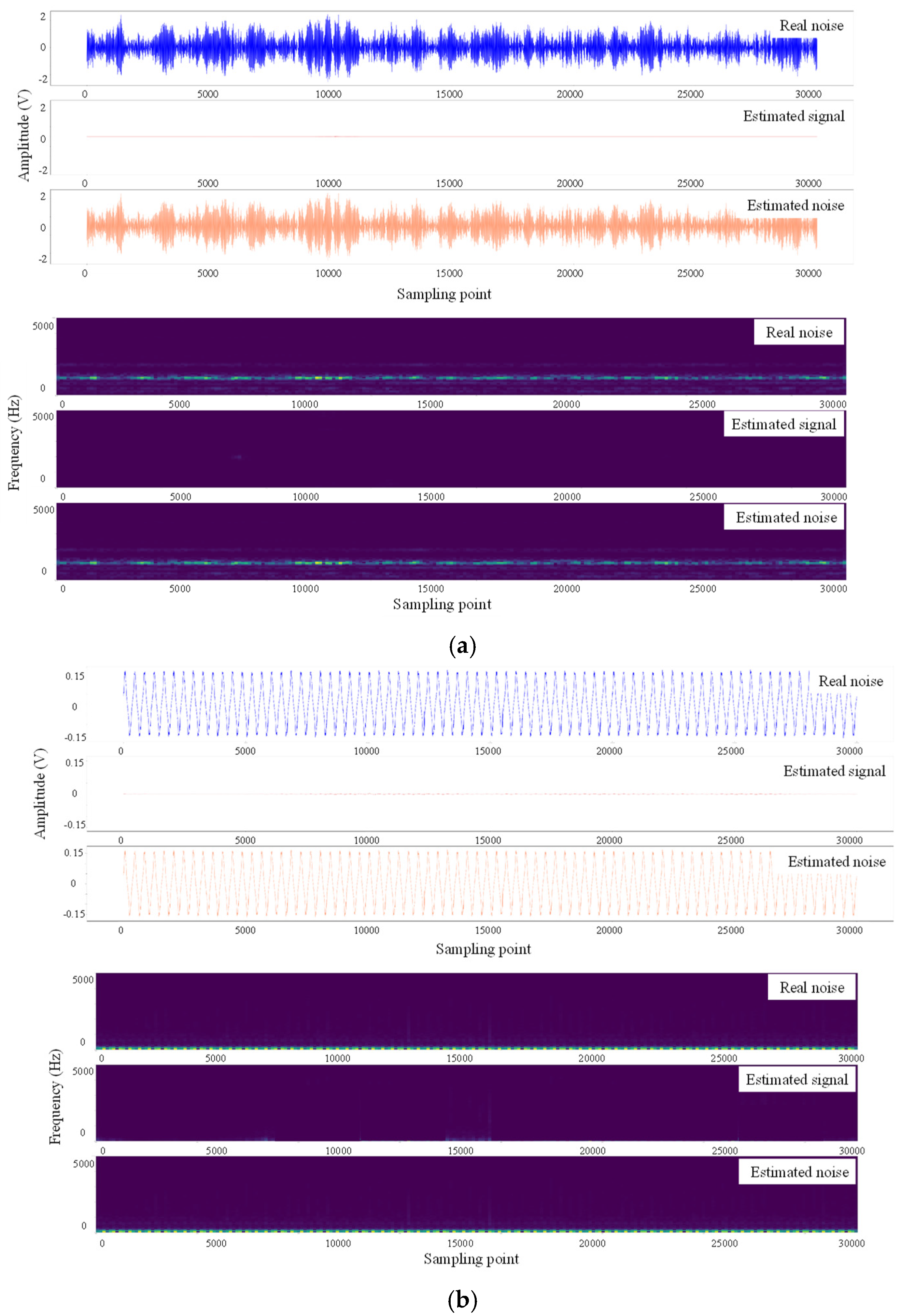
3.2. Application in Real Field
4. Comparison with Other Existing Methods
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Douglas, A. Bandpass filtering to reduce noise on seismograms: Is there a better way? Bull. Seismol. Soc. Am. 1997, 87, 770–777. [Google Scholar]
- Scherbaum, F. Of Poles and Zeros: Fundamentals of Digital Seismology; Kluwer Academic Publishers: Berlin, Germany, 2001. [Google Scholar]
- Allen, J.B.; Rabiner, L.R. A unified approach to short-time Fourier analysis and synthesis. Proc. IEEE 1977, 65, 1558–1564. [Google Scholar] [CrossRef]
- Mousavi, S.M.; Langston, C.A. Hybrid seismic denoising using higher-order statistics and improved wavelet block thresholding. Bull. Seismol. Soc. Am. 2016, 106, 1380–1393. [Google Scholar] [CrossRef]
- Mousavi, S.M.; Langston, C.A. Adaptive noise estimation and suppression for improving microseismic event detection. J. Appl. Geophys. 2016, 32, 116–124. [Google Scholar] [CrossRef]
- Tselentis, G.A.; Martakis, N.; Paraskevopoulos, P.; Lois, A.; Sokos, E. Strategy for automated analysis of passive microseismic data based on s-transform, Otsu’s thresholding, and higher order statistics. Geophysics 2012, 77, KS43–KS54. [Google Scholar] [CrossRef] [Green Version]
- Sabbione, J.I.; Sacchi, M.D.; Velis, D.R. Microseismic Data Denoising via an Apex-Shifted Hyperbolic Radon Transform. Available online: https://library.seg.org/doi/abs/10.1190/segam2013-1414.1 (accessed on 22 September 2020).
- Sabbione, J.I.; Sacchi, M.D.; Velis, D.R. Radon transform-based microseismic event detection and signal-to-noise ratio enhancement. J. Appl. Geophys. 2015, 113, 51–63. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, Y.; Zheng, Y.; Chang, X. Deblending using a high-resolution radon transform in a common midpoint domain. J. Geophys. Eng. 2015, 12, 167–174. [Google Scholar] [CrossRef]
- Galiana-Merino, J.J.; Rosa-Herranz, J.; Giner, J.; Molina, S.; Botella, F. De-noising of short-period seismograms by wavelet packet transform. Bull. Seismol. Soc. Am. 2003, 93, 2554–2562. [Google Scholar] [CrossRef]
- Liu, S.C.; Chen, X. Seismic signals wavelet packet denoising method based on improved threshold function and adaptive threshold. Comput. Model. New Tech. 2014, 18, 1291–1296. [Google Scholar]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shi, H.H.; Zheng, Q.; Yen, N.C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. Roy. Soc. A-Math. Phy. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Chen, W.; Xie, J.Y.; Zu, S.H.; Gan, S.W.; Chen, Y.K. Multiple-reflection noise attenuation using adaptive randomized-order empirical mode decomposition. IEEE Geosci. Remote Sens. Lett. 2017, 14, 18–22. [Google Scholar] [CrossRef]
- Bekara, M.; Baan, M.V.D. Random and coherent noise attenuation by empirical mode decomposition. Geophysics 2009, 74, 89–98. [Google Scholar] [CrossRef]
- Hashemi, H.; Javaherian, A.; Babuska, R. A semi-supervised method to detect seismic randomnoise with fuzzy GK clustering. J. Geophys. Eng. 2008, 5, 457–468. [Google Scholar] [CrossRef]
- Oropeza, V.; Sacchi, M. Simultaneous seismic data denoising and reconstruction via multichannel singular spectrum analysis. Geophysics 2011, 76, V25–V32. [Google Scholar] [CrossRef]
- Chen, Y.; Ma, J.; Fomel, S. Double-sparsity dictionary for seismic noise attenuation. Geophysics 2016, 81, V17–V30. [Google Scholar] [CrossRef]
- Li, H.; Wang, R.; Cao, S.; Chen, Y.; Huang, W. A method for low frequency noise suppression based on mathematical morphology in microseismic monitoring. Geophysics 2016, 81, V159–V167. [Google Scholar] [CrossRef]
- Bonar, D.; Sacchi, M. Denoising seismic data using the nonlocal means algorithm. Geophysics 2012, 77, A5–A8. [Google Scholar] [CrossRef]
- Rao, Y.Z.; Wang, L.; Rao, R.; Shao, Y.J.; Liu, J. A method for blasting vibration signal denoising based on empircal mode decomposition and wavelet threshold. J. Fuzhou Univ. (Nat. Sci. Ed.) 2015, 43, 271–277. [Google Scholar]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA; London, UK, 2016; Volume 1. [Google Scholar]
- Perol, T.; Gharbi, M.; Denolle, M. Convolutional neural network for earthquake detection and location. Sci. Adv. 2018, 4, e1700578. [Google Scholar] [CrossRef] [Green Version]
- Ross, Z.E.; Meier, M.A.; Hauksson, E. P-wave arrival picking and first-motion polarity determination with deep learning. J. Geophys. Res. Solid Earth 2018, 123, 5120–5129. [Google Scholar] [CrossRef]
- Zheng, J.; Lu, J.; Peng, S.; Jiang, T. An automatic microseismic or acoustic emission arrival identification scheme with deep recurrent neural networks. Geophys. J. Int. 2018, 212, 1389–1397. [Google Scholar] [CrossRef]
- Zhu, W.Q.; Beroza, G.C. Phasenet: A deep-neuralnetwork-based seismic arrival time picking method. Geophys. J. Int. 2018, 216, 261–273. [Google Scholar] [CrossRef] [Green Version]
- Ioffe, S.; Szegedy, C. Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift. In Proceedings of the 32nd International Conference on Machine Learning, Lile, France, 7–9 July 2015; pp. 448–456. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Medical Image Computing and Computer-Assisted Intervention—MICCAI 2015; Navab, N., Hornegger, J., Wells, W., Frangi, A., Eds.; Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2015. [Google Scholar]
- Mousavi, S.M.; Zhu, W.Q.; Sheng, Y.X.; Beroza, G.C. Cred: A deep residual network of convolutional and recurrent units for earthquake signal detection. Sci. Rep. 2019, 9, 10267. [Google Scholar] [CrossRef] [PubMed]
- Zhu, W.Q.; Mousavi, S.M.; Beroza, G.C. Seismic Signal Denoising and Decomposition Using Deep Neural Networks. IEEE Trans. Geosci. Remote Sens. 2019, 57, 9476–9488. [Google Scholar] [CrossRef] [Green Version]
- Mantovani, E.; Albarello, D.; Mucciarelli, M. Seismic activity in North Aegean Region as middle-term precursor of Calabrian earthquakes. Phys. Earth Planet. Int. 1986, 44, 264–273. [Google Scholar] [CrossRef]












© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Ma, C.; Pazzi, V.; Zou, Y.; Casagli, N. Microseismic Signal Denoising and Separation Based on Fully Convolutional Encoder–Decoder Network. Appl. Sci. 2020, 10, 6621. https://doi.org/10.3390/app10186621
Zhang H, Ma C, Pazzi V, Zou Y, Casagli N. Microseismic Signal Denoising and Separation Based on Fully Convolutional Encoder–Decoder Network. Applied Sciences. 2020; 10(18):6621. https://doi.org/10.3390/app10186621
Chicago/Turabian StyleZhang, Hang, Chunchi Ma, Veronica Pazzi, Yulin Zou, and Nicola Casagli. 2020. "Microseismic Signal Denoising and Separation Based on Fully Convolutional Encoder–Decoder Network" Applied Sciences 10, no. 18: 6621. https://doi.org/10.3390/app10186621
APA StyleZhang, H., Ma, C., Pazzi, V., Zou, Y., & Casagli, N. (2020). Microseismic Signal Denoising and Separation Based on Fully Convolutional Encoder–Decoder Network. Applied Sciences, 10(18), 6621. https://doi.org/10.3390/app10186621