A New Challenge: Path Planning for Autonomous Truck of Open-Pit Mines in The Last Transport Section


Abstract
:1. Introduction
- We propose a truck path planning method based on high-precision digital map for the final transportation section of open-pit mines, which can effectively reduce the driving cost of trucks.
- We design a planning map that contains obstacle information and roughness information on the road surface and its construction method.
- We improve the Hybrid A* algorithm to incorporate the roughness information into the cost estimation function of node extension.
2. Materials and Methods
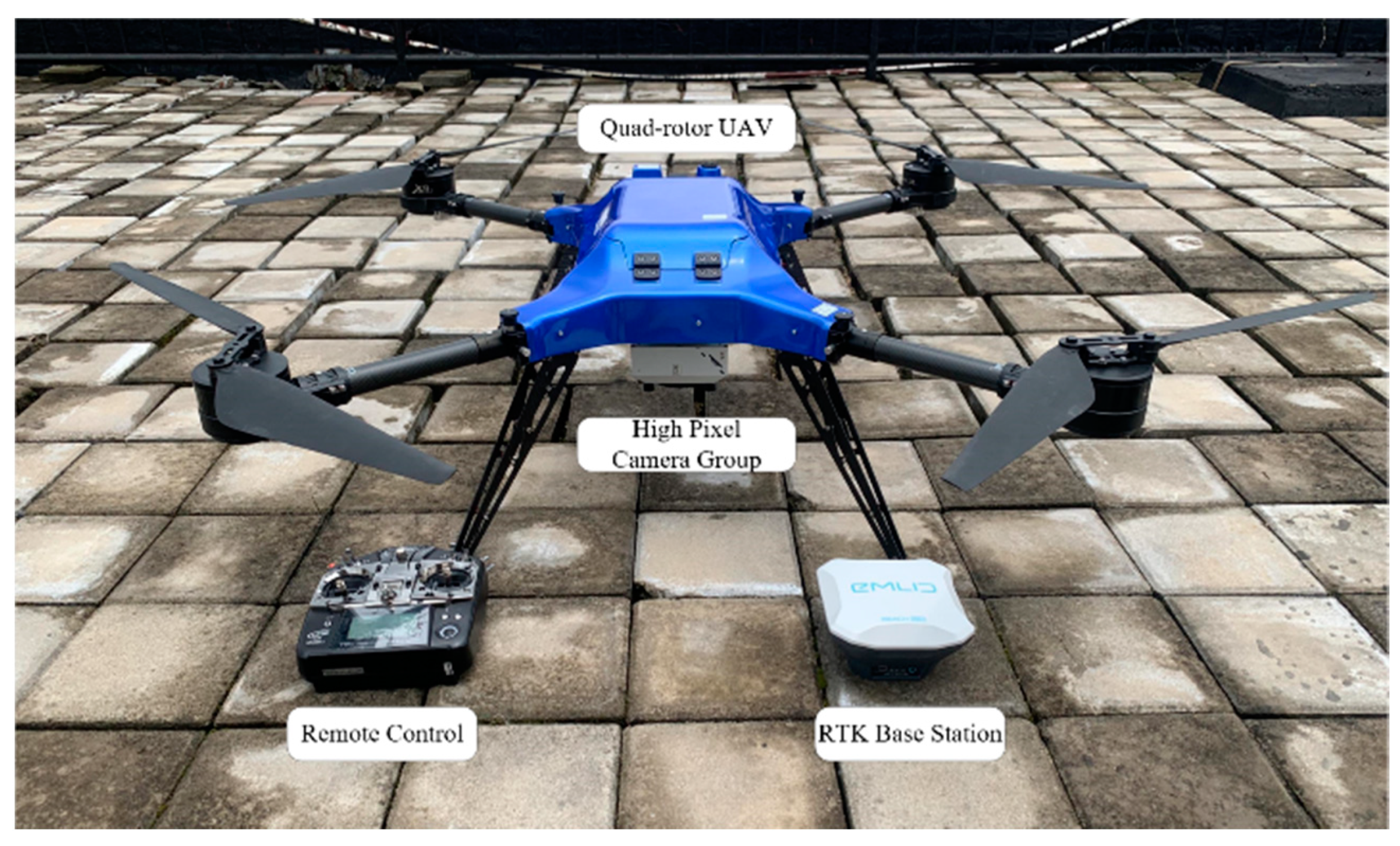
- DSM data acquisition and generation. The raw elevation data of cutting zone is obtained by some topographic mapping methods (oblique photogrammetry, lidar scanning, etc.), and the corresponding DSM is generated.
- Constructing the obstacle cost map of the cutting zone. Firstly, the obstacle point set in DSM is filtered by setting different terrain factors thresholds. Then the obstacle binary map is constructed by the elevation scanning method, and finally, the obstacle cost map is made from GVD.
- Constructing the roughness cost map of the cutting zone. Firstly, removing the obstacle point set in DSM, filtering the remaining point set with another terrain threshold. Then, using the standard deviation of moving window to traverse calculation, its value is taken as the roughness value of all coordinate points within the window range. Finally, normalizing the roughness matrix to generate the roughness cost Map of the cutting zone.
- Generating the C-MAP. Overlaying and normalizing the value matrix of obstacle cost map and roughness cost map, get the C-MAP, which is used in path planning.
- Modify the g-value estimation function. The contact cost between the tire and the ground surface is added into the g-value estimation function. Consequently, the step length a dynamic value instead of a static value in the part of the node extension.
- Modify the conjugate gradient object function. The original Voronoi term is replaced by a new roughness term to correct the path points passing through rough area.
2.1. Raw Data Collection and DSM Generation
2.2. Obstacle Cost Map Construction
2.2.1. Elevation Feature Points Extraction
- Reforming the elevation matrix according to the different scanning directions. The elements of each column in is put into , as shown in Equation (2).
- Scanning each data point sequentially in : set a searching group with , the step length is one. If the point is the first or last point of , or local extremum of the group, add the point to the candidate feature points set , where contains the elevation value and coordinate information. The extracted feature points are shown in Figure 3a.
- Filtering the points of by terrain threshold which is defined by the characteristics of the cutting zone. Then determine whether and are adjacent in . If they are adjacent, judge the absolute value of two-point difference, whether it’s over the threshold . If the value greater than , will be reserved in . Otherwise, will be removed from . The original section scanning line and the final feature point set are shown in Figure 3b.
2.2.2. Binary Map Construction
2.2.3. Obstacle Cost Map Generation
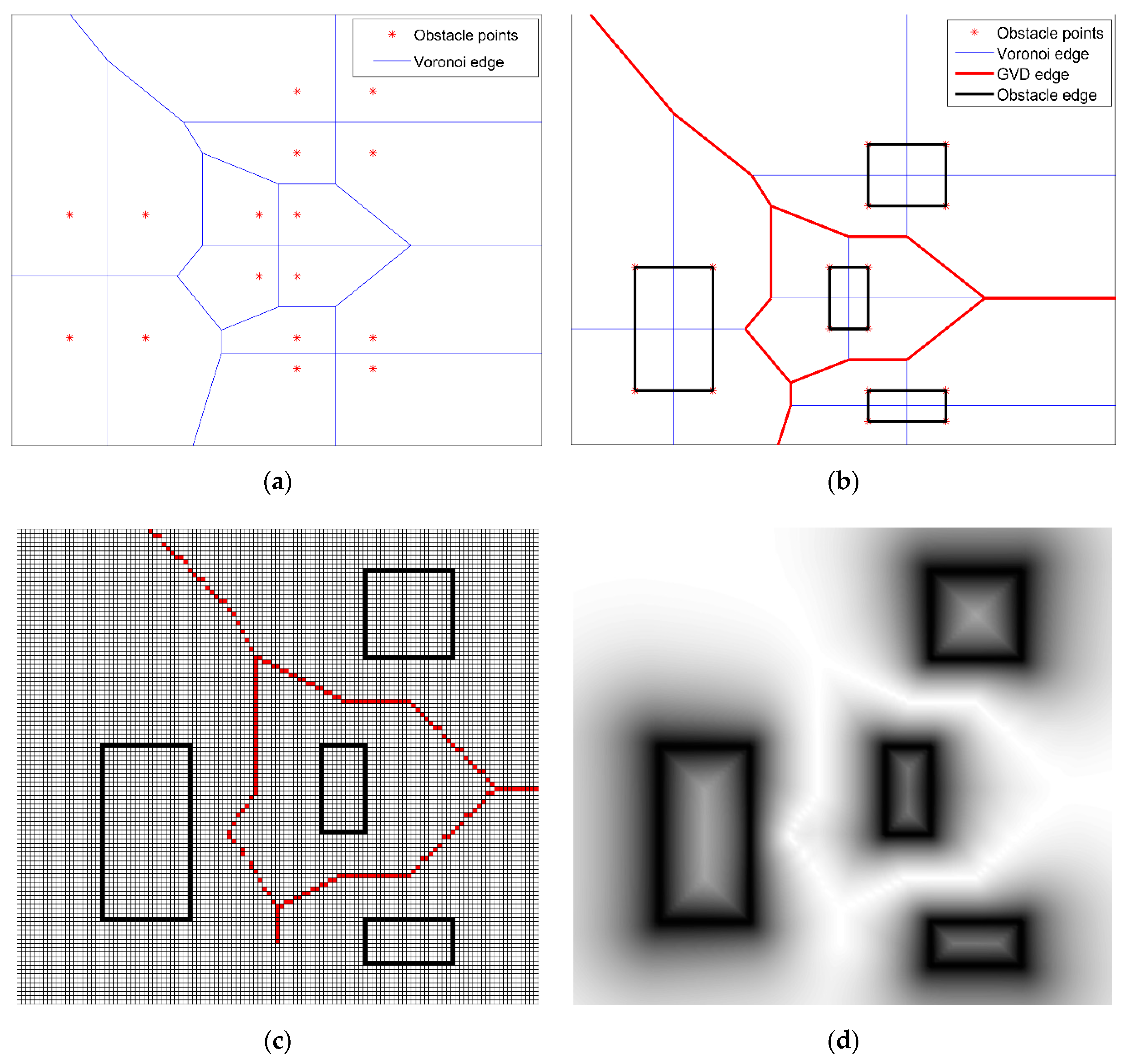
- Building the two-dimensional Voronoi diagram from the binary map. The 1-value coordinate points in the binary map of obstacles are regarded as the scatter points. Then, calculate the 2-D Voronoi diagram of all scatter points. The red dot is the Voronoi station, and the blue line is the Voronoi edge, as shown in Figure 6a.
- Cutting off the Voronoi edges which passing through the obstacle polygon, and the remaining edges are the edges of GVD. The black square is the obstacle polygon, and the red line is the GVD edges, as shown in Figure 6b.
- Converting the GVD into grid form by sampling method, as shown in Figure 6c. Then, calculating each grid cost by Equation (5) to construct the obstacle cost map. The grid cost reaches its maximum within obstacles, and the color is close to black. It reaches its minimum on the GVD edges. The color is close to white, as shown in Figure 6d.
2.3. Roughness Cost Map Construction
- Removing the coordinate of obstacles in the original elevation point set , and obtained a new point set , which only keeps the elevation value of the open space area.
- Using the section scanning method (threshold ) to process the open space area, deleting the elevation value of a point below the threshold from .
- In , taking a window and using the sliding standard deviation method to traverse , and calculating the standard deviation of the window, then assigning its value back to each point in this window.
- Normalizing all the values of points in with a range of 0 to 1, which is the same as the obstacle cost range.
- Through the above steps, we can get the rough ground cost map of the cutting zone, as shown in Figure 8a.
2.4. C-MAP Generating
- Removing the obstacle points (cost = 1) from OCM, and adding the remaining OCM to RCM.
- Normalizing the obtained matrix.
- Backfilling obstacle points of OCM.
2.5. Hybrid A* Algorithm Improvement
2.5.1. Node Extension Improvement
2.5.2. Estimation Function Improvement
2.5.3. Conjugate Gradient Method Improvement
2.5.4. The Modified Hybrid A* Algorithm in Detail
| Algorithm 1 Modified Hybrid A* | |
| 1: | Set Vehicle properties: |
| 2: | Set planner: |
| 3: | Input: |
| 4: | Procedure Hybrid A* planner |
| 5: | Node extension |
| 6: | Validate the node |
| 7: | RS curve check |
| 8: | return Path Points |
| 9: | Processing Path Points by ConjugateGradientSmoother |
| 10: | return the Path Points after CG optimization |
| 11: | end procedure |
| 12: | Procedure gScore |
| 13: | of |
| 14: | |
| 15: | Generate the tire path besides the extension line according to |
| 16: | Calculate the occupied grid coordinates of the tire path |
| 17: | Delete duplicate grid coordinates |
| 18: | is the total cost of the occupied gird |
| 19: | if the direction of the direction of then |
| 20: | |
| 21: | else |
| 22: | |
| 23: | end if |
| 24: | end procedure |
3. Performance Analysis of Modified Algorithm
3.1. Analysis of Algorithm Capability in Different Scenes
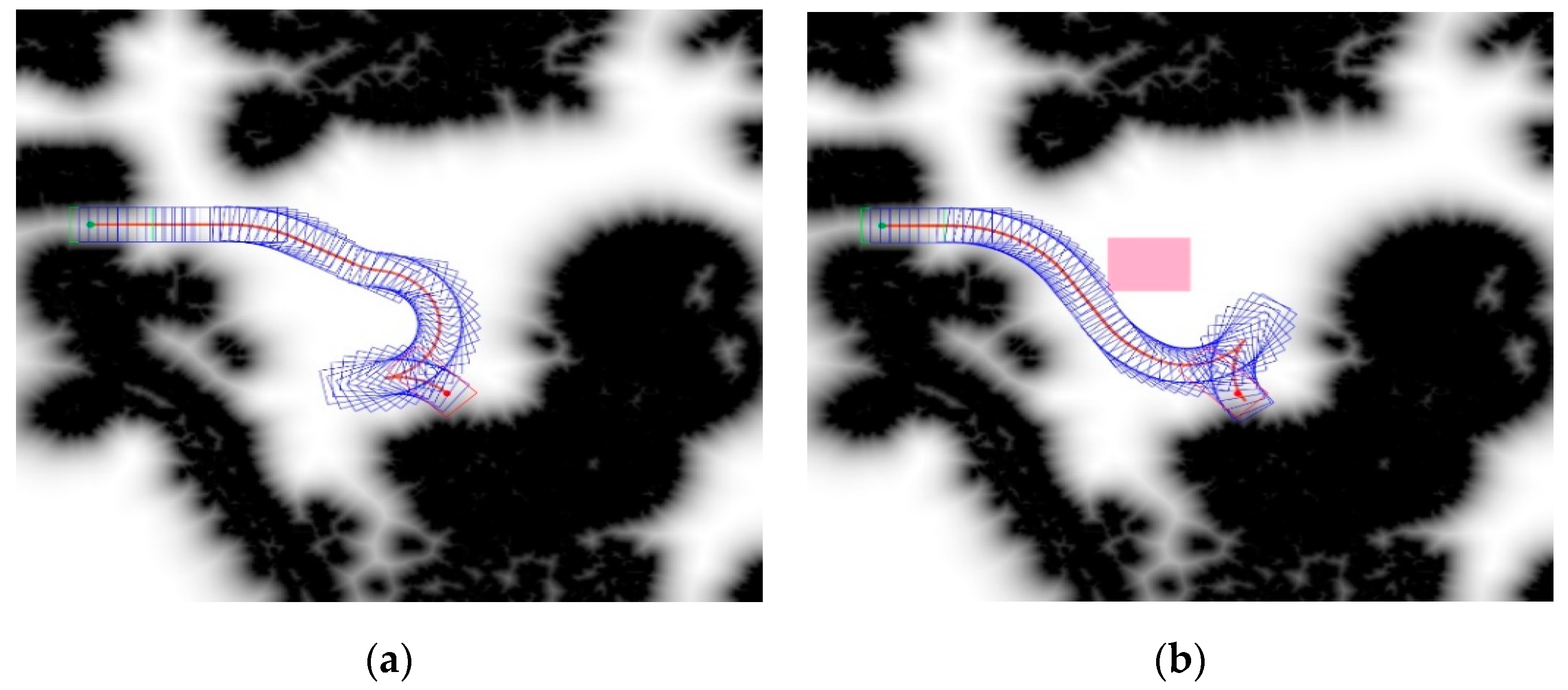
- Testing the recognition and avoidance ability of modified Hybrid A* algorithm for rough terrain. Firstly, plan a path in the obstacle cost map without roughness information. Then, after a virtual rough area is artificially added to the map and plan the path again. The result is shown in Figure 14.
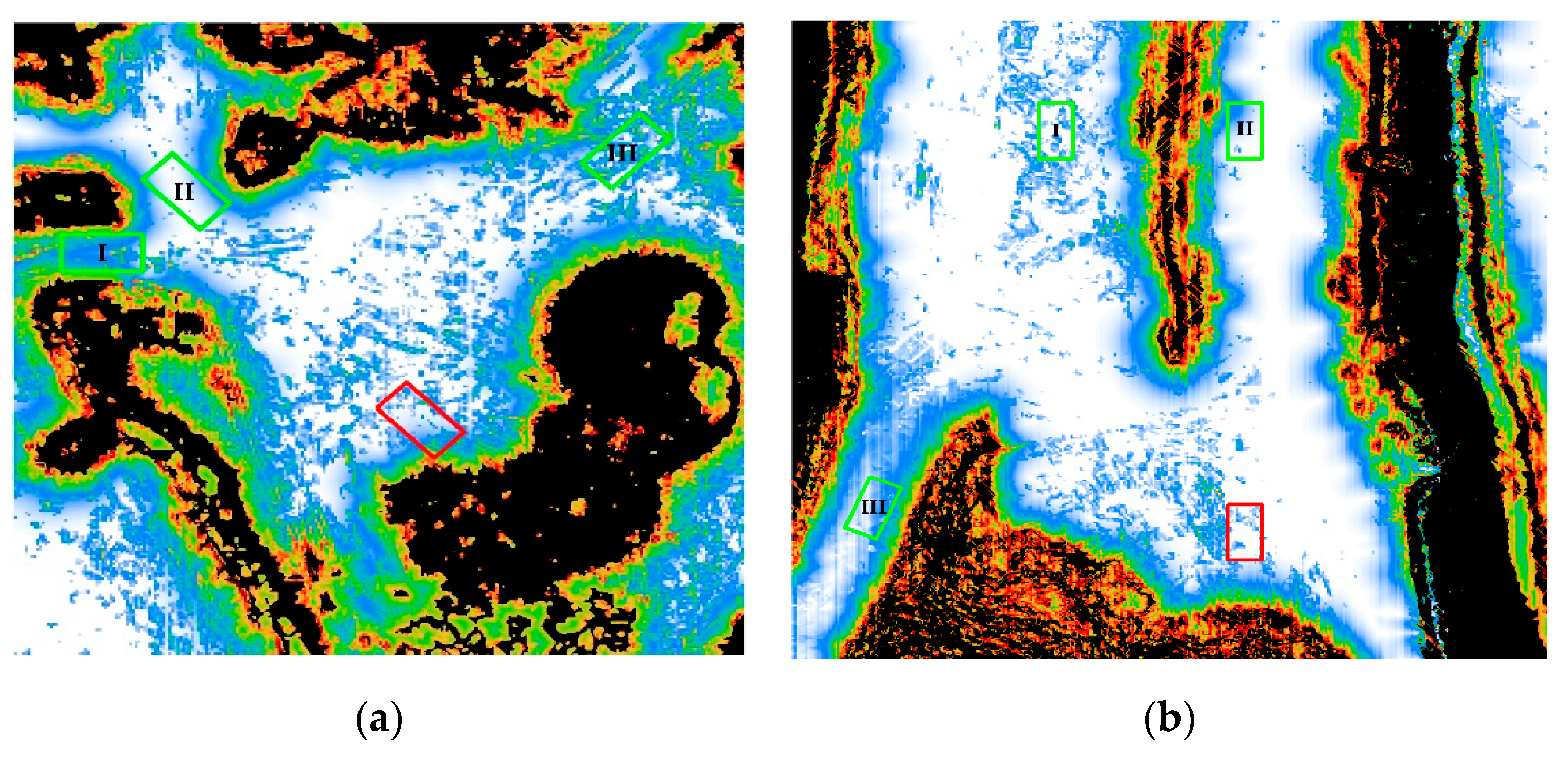
- Evaluating the path planned by the modified Hybrid A* algorithm in obstacle cost map and C-MAP, the results are shown in Figure 15.
3.2. Analysis of Algorithm Robustness
- The influence of planning map construction, including the DSM accuracy and filter threshold. The accuracy of DSM directly affects the recognition ability of the construction algorithm for surface roughness. However, the improvement of accuracy will result in more computational work and the program needs to process more data units. Therefore, 0.1 m is an appropriate accuracy value.
- For the filter threshold, it affects the ability of the construction algorithm to distinguish obstacles from the surface. Moreover, it is difficult to construct a surface roughness model if the terrain is flat.
- The influence is caused by the parameter setting of Hybrid A* algorithm. The setting of parameters will directly affect the quality of the final path. To illustrate, if the ReverseCost setting is greater than ForwardCost, the algorithm will consider the backward situation more. If the Extension Interval setting is too large, it will cause extra computation. Switch Cost penalizes the direction change of a vehicle. However, in this paper, since Tire Cost is a dynamic value, the static value of Switch Cost will weaken its effect so that it can be considered as an adaptive value.
- Caused by statistics of path cost. The entropy method may not be able to integrate the path length and the accumulative cost on the surface very well, which makes the calculation error.
4. Conclusions
5. Future Work
- We will collect the environmental information of the cutting zone and construct a real-time local DSM map by using detection sensors, such as Lidar, camera, GNSS receiver, etc. This enables continuous path planning by continually updating the global map and maintaining its timeliness and accuracy. Due to the errors in acquisition equipment and mapping procedure, the matching and fusion updating of the real-time local map and the global map is the focus and difficulty of future works.
- We will study the relationship between road roughness and vehicle transportation cost. Establishing a model to predict vehicle transportation costs based on different surface roughness conditions will be the critical feature of future work.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Mukhopadhjay, A. Selection, maintenance, and relations of various parameters for off-highway hauling tires. Off-Highw. Haul. Surf. Mines Ed. Golosinski Sraje Balkema 1989, 153–159. [Google Scholar]
- Widdifield, L.; Riggle, R. The Big Picture: An Overview Approach to Surface Mining. Min. Eng. 2016, 24, 3–5. Available online: http://me.smenet.org/docs/Publications/ME/Issue/Feb_Web_Exclusive1.pdf (accessed on 1 August 2020).
- Corporation, V. A new approach to building haul roads. Eng. Min. J. 2015, 216, 46–49. [Google Scholar]
- Arai, T.; Pagello, E.; Parker, L.E. Advances in multi-robot systems. IEEE Trans. Robot. Autom. 2002, 18, 655–661. [Google Scholar] [CrossRef] [Green Version]
- Farinelli, A.; Iocchi, L.; Nardi, D. Multi-robot systems: A classification focused on coordination. IEEE Trans. Syst. Man Cybern. Part B (Cybern.) 2004, 34, 2015–2028. [Google Scholar] [CrossRef] [Green Version]
- Yuan, K.; Yuan, L.; Fang, L.X. Recent Researches and Development on Multi- Robot System. J. Autom. 2007, 33, 785–794. [Google Scholar]
- Ni, J.; Hu, J. Dynamics control of autonomous vehicle at driving limits and experiment on an autonomous formula racing car. Mech. Syst. Signal Process. 2017, 90, 154–174. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, J. Active steering actuator fault detection for an automatically-steered electric ground vehicle. IEEE Trans. Veh. Technol. 2016, 66, 3685–3702. [Google Scholar] [CrossRef]
- Roberts, J.M.; Duff, E.S.; Corke, P.I. Autonomous control of under-ground mining vehicles using reactive navigation. In Proceedings of the 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation. Symposia Proceedings (Cat. No.00CH370665), San Francisco, CA, USA, 24–28 April 2000; Volume 4, pp. 3790–3795. [Google Scholar]
- Nebot, E.M.; Gonzalez, J.J. Main research issues for the deployment of full autonomous surface mining operations. In Proceedings of the 22nd International Conference on Computers and Their Applications, CATA-2007, Honolulu, HI, USA, 28–30 March 2007; pp. 213–218. [Google Scholar]
- Komatsu Ltd. Komatsu Celebrates 10th Anniversary of Commercial Deployment of Autonomous Haulage System [EB/OL]. 2018. Available online: https://home.komatsu/en/press/2018/others/1198705_1831.html (accessed on 1 August 2020).
- Bellamy, D.; Pravica, L. Assessing the impact of driverless haul trucks in Australian surface mining. Resour. Policy 2011, 36, 149–158. [Google Scholar] [CrossRef]
- Ayres, A. Considerations when implementing Autonomous Haulage in Open Cut Mining. 2016. Available online: https://amcconsultants.com/experience/dd-considerations-autonomous-haulage-open-cut-mining/ (accessed on 1 August 2020).
- Parreira, J. An Interactive Simulation Model to Compare an Autonomous Haulage Truck System with a Manually-Operated System. Ph.D. Dissertation, University of British Columbia, Vancouver, BC, Canada, 2013. [Google Scholar]
- Kondo, S. Relation Between Haul Road and Damage of Off-Highway Dump Trucks. In Proceedings of the 35th Annual Earthmoving Industry Conference, Peoria, IL, USA, 9–11 April 1984. [Google Scholar] [CrossRef]
- Kansake, B.A.; Frimpong, S. Analytical modelling of dump truck tire dynamic response to haul road surface excitations. Int. J. Min. Reclam. Environ. 2020, 34, 1–18. [Google Scholar] [CrossRef]
- Zhou, C.; Gu, S.; Wen, Y.; Du, Z.; Xiao, C.; Huang, L.; Zhu, M. The Review Unmanned Surface Vehicle Path Planning: Based on Multi-Modality Constraint. Ocean Eng. 2020, 200, 107043. [Google Scholar] [CrossRef]
- Choi, Y.; Nieto, A. Optimal haulage routing of off-road dump trucks in construction and mining sites using Google Earth and a modified least-cost path algorithm. Autom. Constr. 2011, 20, 982–997. [Google Scholar] [CrossRef]
- McPherron, S.J. Artifact orientations and site formation processes from total station proveniences. J. Archaeol. Sci. 2005, 32, 1003–1014. [Google Scholar] [CrossRef]
- Wehr, A.; Lohr, U. Airborne laser scanning—An introduction and overview. ISPRS J. Photogramm. Remote Sens. 1999, 54, 68–82. [Google Scholar] [CrossRef]
- Lin, Y.; Hyyppä, J.; Jaakkola, A. Mini-UAV-Borne LIDAR for Fine-Scale Mapping. IEEE Geosci. Remote Sens. Lett. 2011, 8, 426–430. [Google Scholar] [CrossRef]
- Frueh, C.; Sammon, R.; Zakhor, A. Automated texture mapping of 3D city models with oblique aerial imagery. In Proceedings of the 2nd International Symposium on 3D Data Processing, Visualization and Transmission, Thessaloniki, Greece, 6–9 September 2004; Volume 31, pp. 396–403. [Google Scholar]
- Toschi, I.; Ramos, M.M.; Nocerino, E.; Menna, F.; Remondino, F.; Moe, K.; Poli, D.; Legat, K.; Fassi, F. Oblique Photogrammetry Supporting 3D Urban Reconstruction of Complex Scenarios. ISPRS–International Archives of the Photogrammetry. Remote Sens. Spat. Inf. Sci. 2017, 519–526. [Google Scholar] [CrossRef] [Green Version]
- Qin, X.; Qin, Q.; Yang, X.; Wang, J.; Chen, C.; Zhang, N. Feasibility study of building seismic damage assessment using oblique photogrammetric technology. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium, Melbourne, Australia, 21–26 July 2013; pp. 208–211. [Google Scholar] [CrossRef]
- Kršák, B.; Blišťan, P.; Pauliková, A.; Puškárová, P.; Kovanič, Ľ.; Palková, J.; Zelizňaková, V. Use of low-cost UAV photogrammetry to analyze the accuracy of a digital elevation model in a case study. Measurement 2016, 91, 276–287. [Google Scholar]
- Rauhala, A.; Tuomela, A.; Davids, C. UAV remote sensing surveillance of a mine tailings impoundment in sub-arctic conditions. Remote Sens. 2017, 9, 1318. [Google Scholar] [CrossRef] [Green Version]
- Suh, J.; Choi, Y. Mapping hazardous mining-induced sinkhole subsidence using unmanned aerial vehicle (drone) photogrammetry. Environ. Earth Sci. 2017, 76, 144. [Google Scholar] [CrossRef]
- Zoto, J.; Musci, M.A.; Khaliq, A.; Chiaberge, M.; Aicardi, I. Automatic Path Planning for Unmanned Ground Vehicle Using UAV Imagery. In Proceedings of the International Conference on Robotics in Alpe-Adria Danube Region, Kaiserslautern, Germany, 19–21 June 2019; pp. 223–230. [Google Scholar] [CrossRef]
- Zhang, K.; Yang, Y.; Fu, M.; Wang, M. Traversability assessment and trajectory planning of unmanned ground vehicles with suspension systems on rough terrain. Sensors 2019, 19, 4372. [Google Scholar] [CrossRef] [Green Version]
- Dolgov, D.; Thrun, S.; Montemerlo, M.; Diebel, J. Practical search techniques in path planning for autonomous driving. Ann. Arbor. 2008, 1001, 18–80. [Google Scholar]
- Mizuno, N.; Ohno, K.; Hamada, R.; Kojima, H.; Fujita, J.; Amano, H.; Tadokoro, S. Enhanced path smoothing based on conjugate gradient descent for firefighting robots in petrochemical complexes. Adv. Robot. 2019, 33, 687–698. [Google Scholar] [CrossRef]
- Verlag, V. Application of Hybrid A to an Autonomous Mobile Robot for Path Planning in Unstructured Outdoor Environments; VDE Verlag: Berlin, Germany, 2012. [Google Scholar]
- Chu, K.; Kim, J.; Jo, K.; Sunwoo, M. Real-time path planning of autonomous vehicles for unstructured road navigation. Int. J. Automot. Technol. 2015, 16, 653–668. [Google Scholar] [CrossRef]
- Kurzer, K. Path Planning in Unstructured Environments: A Real-time Hybrid A* Implementation for Fast and Deterministic Path Generation for the KTH Research Concept Vehicle. Master’s Thesis, KTH Royal Institute of Technology, Stockholm, Sweden, December 2016. [Google Scholar] [CrossRef]
- Wang, J.; Wang, L.; Jia, M.; He, Z.; Bi, L. Construction and optimization method of the open-pit mine DEM based on the oblique photogrammetry generated DSM. Measurement 2020, 152, 107322. [Google Scholar] [CrossRef]
- Patle, B.K.; Pandey, A.; Parhi, D.R.K.; Jagadeesh, A. A review: On path planning strategies for navigation of mobile robot. Def. Technol. 2019, 15, 582–606. [Google Scholar] [CrossRef]
- Niu, H.; Savvaris, A.; Tsourdos, A.; Ji, Z. Voronoi-visibility roadmap-based path planning algorithm for unmanned surface vehicles. J. Navig. 2019, 72, 850–874. [Google Scholar] [CrossRef]
- Hengl, T.; Reuter, H.I. Geomorphometry-Concepts, Software, Applications. In Developments in Soil Science; Elsevier: Amsterdam, The Netherlands, 2009. [Google Scholar]
- Shannon, C.E. A mathematical theory of communication. Bell Syst. Tech. J. 1948, 27, 379–423. [Google Scholar] [CrossRef] [Green Version]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Camera Pixels of UAV | DSM Original Accuracy | DSM Accuracy after Sampling | C-MAP Unit Size |
|---|---|---|---|
| 20 megapixel × 5 | 0.032 m | 0.096 m | 0.1 m × 0.1 m |
| Length | Width | Wheelbase | Minimum Turning Radius | Tire Size |
|---|---|---|---|---|
| 8.7 m | 4.525 m | 3.75 m | 7.2 m | 18.00-33-32 PR |
| Number of Motion Primitives | Motion Length | Forward Cost | Reverse Cost | Switching Cost | Extension Interval |
|---|---|---|---|---|---|
| 5 | 72 | 1 | 5 | 100 | 30 |
| Path Length (m) | Accumulative Cost | Total Score | Optimization Rate (%) | ||
|---|---|---|---|---|---|
| Scene 1 | OCM | 40 | 1124.4 | 1113.8 | 5.93 |
| Start I | C-MAP | 43 | 1057.7 | 1047.8 | |
| Scene 1 | OCM | 39 | 926.9 | 918.2 | 5.26 |
| Start II | C-MAP | 37 | 878.1 | 869.9 | |
| Scene 1 | OCM | 41 | 316.4 | 313.7 | 6.87 |
| Start III | C-MAP | 39 | 294.6 | 292.1 | |
| Scene 2 | OCM | 57 | 386.2 | 382.9 | 18.23 |
| Start I | C-MAP | 61 | 315.7 | 313.1 | |
| Scene 2 | OCM | 54 | 1174.8 | 1163.6 | 9.82 |
| Start II | C-MAP | 58 | 1059.4 | 1049.3 | |
| Scene 2 | OCM | 62 | 1096.8 | 1086.4 | 6.99 |
| Start III | C-MAP | 59 | 1020.1 | 1010.5 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Z.; Bi, L. A New Challenge: Path Planning for Autonomous Truck of Open-Pit Mines in The Last Transport Section. Appl. Sci. 2020, 10, 6622. https://doi.org/10.3390/app10186622
Zhao Z, Bi L. A New Challenge: Path Planning for Autonomous Truck of Open-Pit Mines in The Last Transport Section. Applied Sciences. 2020; 10(18):6622. https://doi.org/10.3390/app10186622
Chicago/Turabian StyleZhao, Ziyu, and Lin Bi. 2020. "A New Challenge: Path Planning for Autonomous Truck of Open-Pit Mines in The Last Transport Section" Applied Sciences 10, no. 18: 6622. https://doi.org/10.3390/app10186622
APA StyleZhao, Z., & Bi, L. (2020). A New Challenge: Path Planning for Autonomous Truck of Open-Pit Mines in The Last Transport Section. Applied Sciences, 10(18), 6622. https://doi.org/10.3390/app10186622