Active Disturbance Compensation Based Robust Control for Speed Regulation System of Permanent Magnet Synchronous Motor



Abstract
:1. Introduction
2. Problem Formation
3. Controller Design
3.1. Speed Loop Controller Design
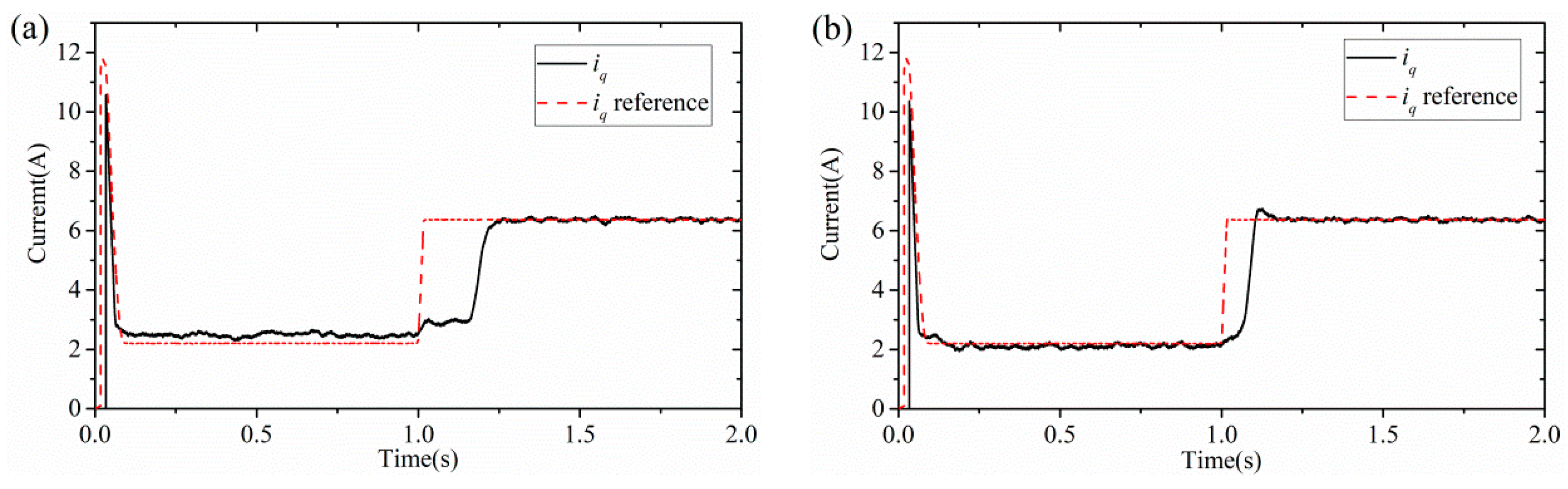
3.2. Design of q-Axis Current Controller
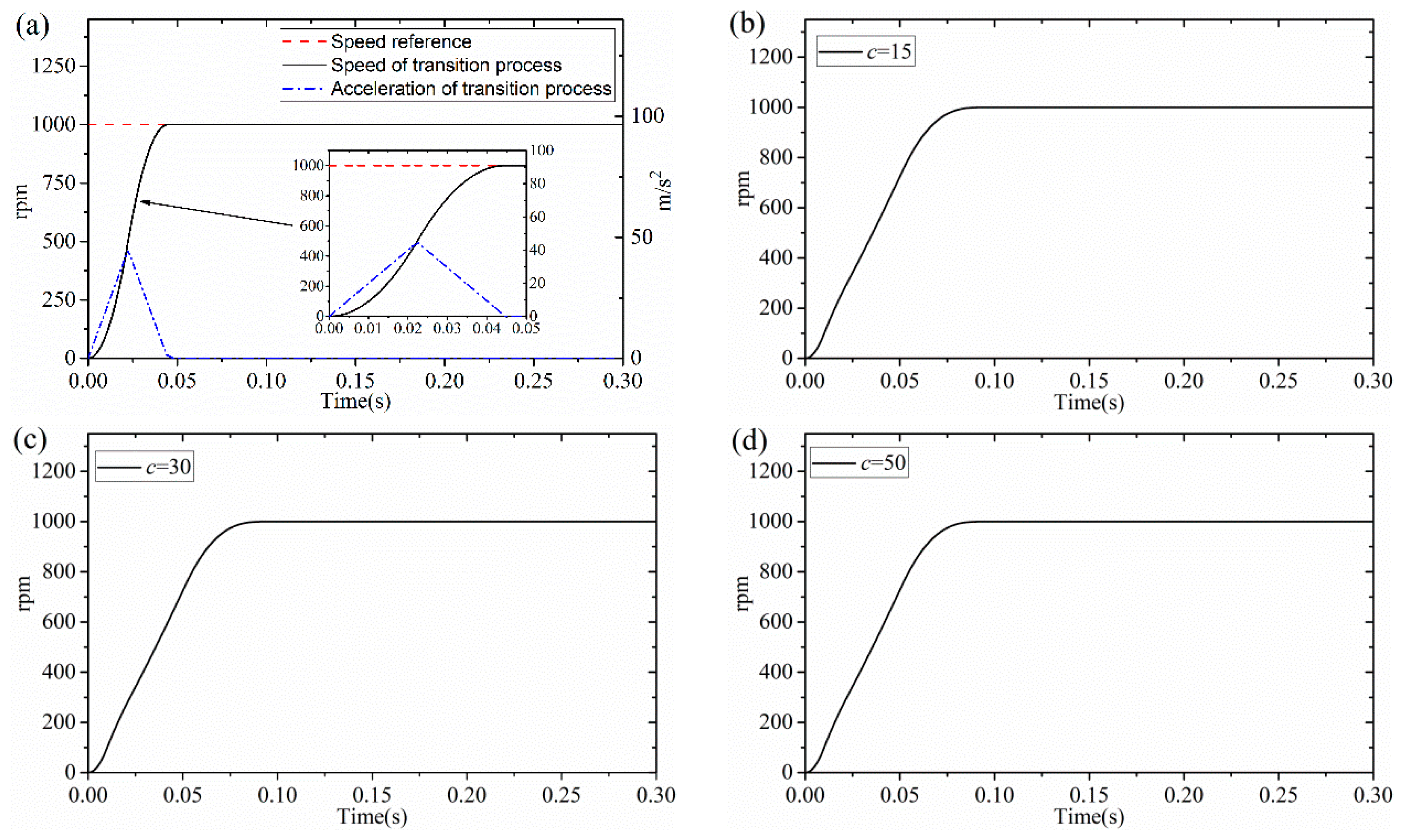
3.3. Transition Peocess Based on TD
4. Simulation and Experiment Results
4.1. Simulation Results
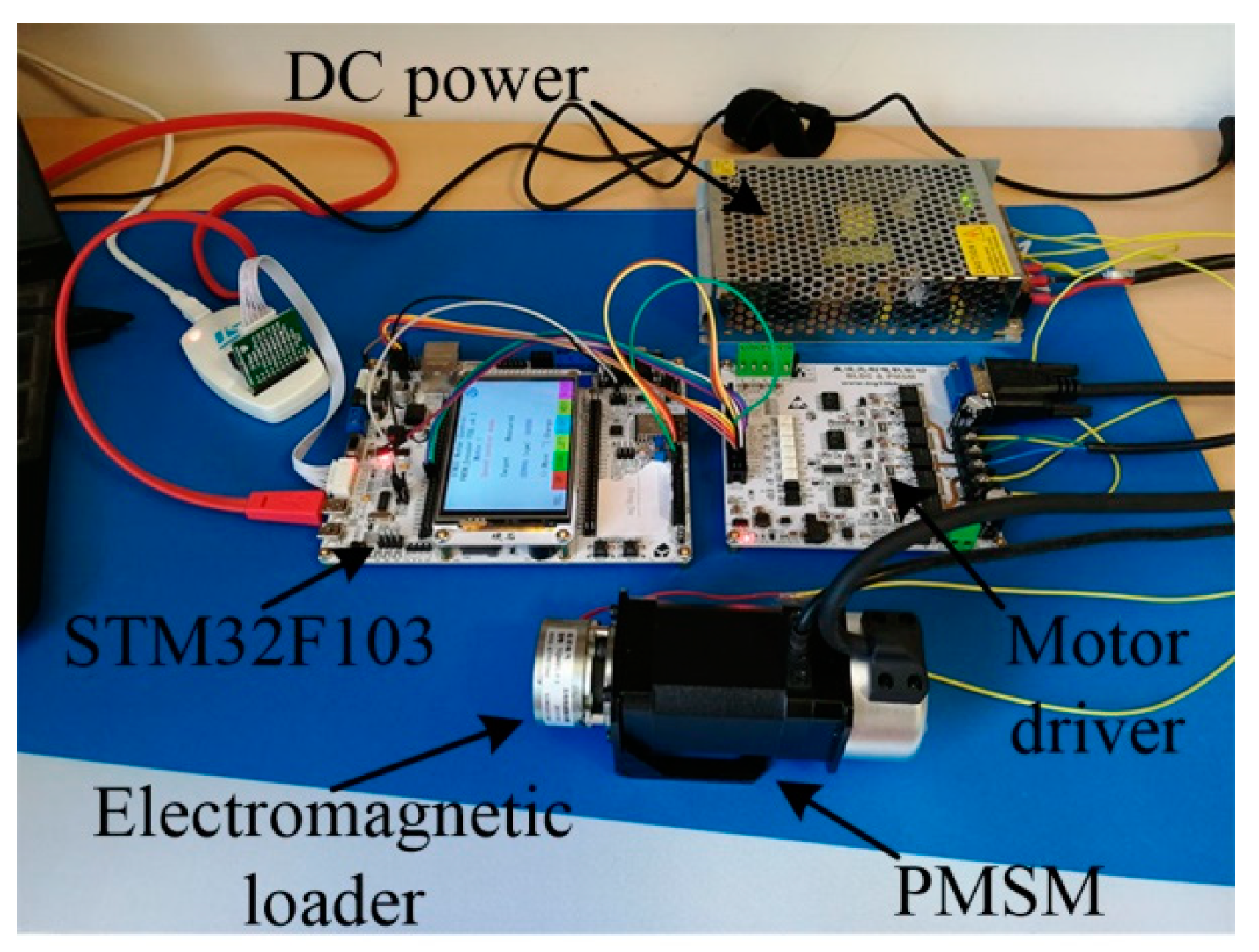
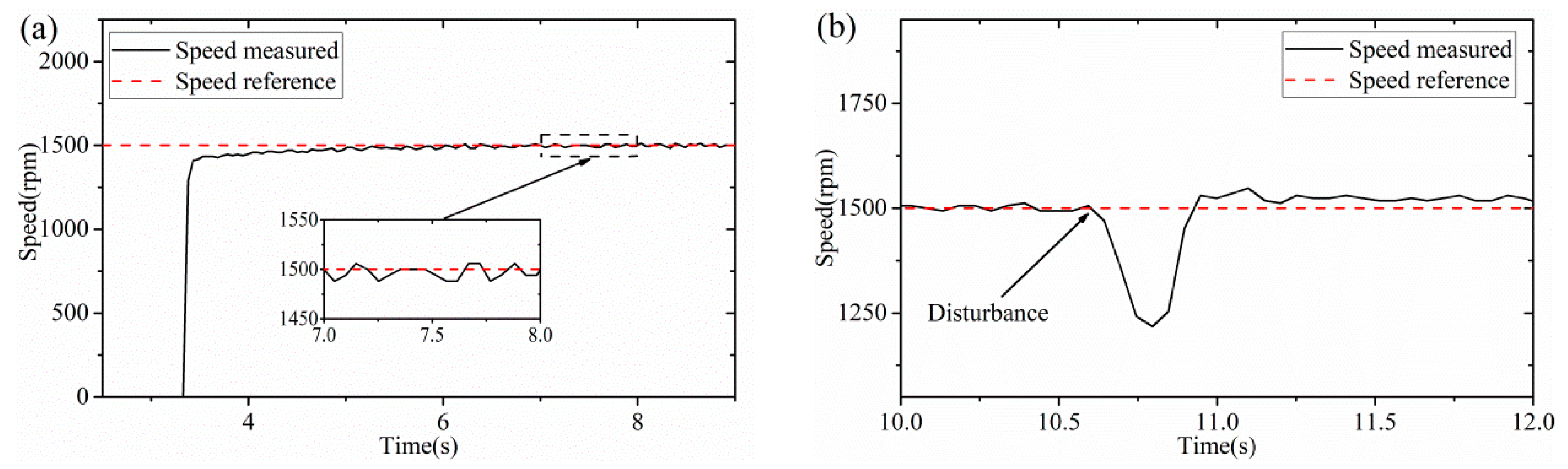
4.2. Experiment Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Grcar, B.; Cafuta, P.; Znidaric, M.; Gausch, F. Nonlinear control of synchronous servo drive. IEEE Trans. Control Syst. Technol. 1996, 4, 177–184. [Google Scholar] [CrossRef]
- Zhou, A.M.; Wu, Y.; Zhong, L.; Chen, Q.; Guo, J. Adaptive robust control for high-speed permanent magnet synchronous motor systems. In Proceedings of the 2017 3rd IEEE International Conference on Control Science and Systems Engineering (ICCSSE), Beijing, China, 17–19 August 2017; pp. 346–350. [Google Scholar]
- Xu, Y.P.; Hou, Y.L.; Li, Z.H. Robust predictive speed control for SPMSM drives based on extended state observers. J. Power Electron. 2019, 19, 497–508. [Google Scholar]
- Ye, J.G.; Yang, J.H.; Xie, D.S.; Huang, B.Z. Strong robust and optimal chaos control for permanent magnet linear synchronous motor. IEEE Access 2019, 7, 57907–57916. [Google Scholar] [CrossRef]
- Choi, H.H.; Jung, J.W. Takagi-sugeno fuzzy speed controller design for a permanent magnet synchronous motor. Mechatronics 2011, 21, 1317–1328. [Google Scholar] [CrossRef]
- Hou, L.M.; Li, W.H.; Shen, H.S.; Li, T.C. Fuzzy sliding mode control for systems with matched and mismatched uncertainties/disturbances based on ENDOB. IEEE Access 2019, 7, 666–673. [Google Scholar] [CrossRef]
- Khorashadizadeh, S.; Sadeghijaleh, M. Adaptive fuzzy tracking control of robot manipulators actuated by permanent magnet synchronous motors. Comput. Electr. Eng. 2018, 72, 100–111. [Google Scholar] [CrossRef]
- Liu, L.; Cartes, D.A. Synchronisation based adaptive parameter identification for permanent magnet synchronous motors. IET Control Theory Appl. 2007, 1, 1015–1022. [Google Scholar] [CrossRef]
- Luo, Y.; Chen, Y.; Ahn, H.S.; Pi, Y. Dynamic high order periodic adaptive learning compensator for cogging effect in permanent magnet synchronous motor servo system. IET Control Theory Appl. 2011, 5, 669–680. [Google Scholar] [CrossRef]
- Li, S.H.; Liu, Z.G. Adaptive speed control for permanent-magnet synchronous motors system with variations of load inertia. IEEE Trans. Ind. Electron. 2009, 5, 3050–3059. [Google Scholar]
- Barambones, O.; Garrido, A.J.; Maseda, F.J. Integral sliding-mode controller for induction motor based on field-oriented control theory. IET Control Theory Appl. 2007, 1, 786–794. [Google Scholar] [CrossRef]
- Huang, Y.; Sung, C. Implementation of sliding mode controller for linear synchronous motors based on direct thrust control theory. IET Control Theory Appl. 2010, 4, 326–338. [Google Scholar] [CrossRef]
- Wang, X.; Reitz, M.; Yaz, E.E. Field oriented sliding mode control of surface-mounted permanent magnet ac motors: Theory and applications to electrified vehicles. IEEE Trans. Veh. Technol. 2018, 67, 10343–10356. [Google Scholar] [CrossRef] [Green Version]
- Linares-Flores, J.; García-Rodríguez, C.; Sira-Ramírez, H.; Ramírez-Cárdenas, O.D. Robust backstepping tracking controller for low-speed PMSM positioning system: Design, analysis, and implementation. IEEE Trans. Ind. Inform. 2015, 11, 1130–1141. [Google Scholar] [CrossRef]
- Wu, S.F.; Zhang, J.W. A terminal sliding mode observer based robust backstepping sensorless speed control for interior permanent magnet synchronous motor. Int. J. Control Autom. Syst. 2018, 16, 2743–2753. [Google Scholar] [CrossRef]
- Ning, B.; Cheng, S.M.; Qin, Y. Direct torque control of PMSM using sliding mode backstepping control with extended state observer. J. Vib. Control 2018, 24, 694–707. [Google Scholar] [CrossRef]
- Zhao, D.Z.; Li, C.W.; Ren, J. Speed synchronization of multiple induction motors with adjacent cross-coupling control. IET Control Theory Appl. 2010, 4, 119–128. [Google Scholar] [CrossRef]
- Zhang, X.; Sun, L. Nonlinear speed control for PMSM using sliding mode control and disturbance compensation techniques. IEEE Trans. Power Electron. 2013, 28, 1358–1368. [Google Scholar] [CrossRef]
- Ohnishi, K. A new servo method in mechatronics. Trans. Jpn. Soc. Electr. Eng. 1987, 107, 83–86. [Google Scholar]
- Wei, X.; Guo, Z.; Liu, X. Composite hierarchical anti-disturbance control for nonlinear robotic systems with robust nonlinear disturbance observer. In Proceedings of the 32nd Chinese Control Conference, Xi’an, China, 26–28 July 2013; pp. 2694–2699. [Google Scholar]
- He, X.; Kou, G.; Calaf, M. In-ground-effect modeling and nonlinear-disturbance observer for multirotor unmammed aerial vehicle control. J. Dyn. Syst. Meas. Control-Trans. ASME 2019, 141, 071013. [Google Scholar] [CrossRef] [Green Version]
- Zhao, W.X.; Jiao, S.; Chen, Q.; Xu, D.Z. Senseless control of a linear permanent-magnet motor based on an improved disturbance observer. IEEE Trans. Ind. Electron. 2018, 65, 9291–9300. [Google Scholar] [CrossRef]
- Li, S.; Zhou, M.; Yu, X. Design and implementation of terminal sliding mode control method for PMSM speed regulation system. IEEE Trans. Ind. Inform. 2013, 7, 1879–1891. [Google Scholar] [CrossRef]
- Yan, J.; Wang, H.; Huang, S. Load disturbance observer-based complementary sliding mode control for PMSM of the mine traction electric locomotive. Int. J. Fuzzy Syst. 2019, 21, 1051–1058. [Google Scholar] [CrossRef]
- Yan, Y.D.; Yang, J.; Sun, Z.X.; Zhang, C.L.; Li, S.H. Robust speed regulation for PMSM servo system with multiple sources of disturbances via an augmented disturbance observer. IEEE-ASME Trans. Mechatron. 2018, 23, 769–780. [Google Scholar] [CrossRef]
- Han, J.Q. The extended state observer of a class of uncertain systems. Control Decis 1995, 10, 85–88. (In Chinese) [Google Scholar]
- Han, J.Q. From PID to active disturbance rejection control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Li, S.; Zong, K.; Liu, H. A composite speed controller based on a second-order model of PMSM system. Trans. Inst. Meas. Control 2011, 33, 522–541. [Google Scholar]
- Du, B.; Wu, S.; Han, S.; Cui, S. Application of linear active disturbance rejection controller for senseless control of internal permanent-magnet synchronous motor. IEEE Trans. Ind. Electron. 2016, 63, 3019–3027. [Google Scholar] [CrossRef]
- Wang, G.L.; Wang, B.W.; Li, C.; Xu, D.G. Weight-transducerless control strategy based on active disturbance rejection theory for gearless elevator drives. IET Electr. Power Appl. 2016, 11, 289–299. [Google Scholar] [CrossRef]
- Li, S.; Xia, C.; Zhou, X. Disturbance rejection control method for permanent magnet synchronous motor speed-regulation system. Mechatronics 2012, 22, 706–714. [Google Scholar] [CrossRef]
- Zwerger, T.; Mercorelli, P. Combining an internal SMC with an external MTPA control loop for an interior PMSM. In Proceedings of the 2018 23rd International Conference on Methods and Models in Automation and Robotics, Miedzyzdroje, Poland, 27–30 August 2018; art no. 8485900. pp. 674–679. [Google Scholar]
- Zwerger, T.; Mercorelli, P. Combining SMC and MTPA using an EKF to estimate parameters and states of an interior PMSM. In Proceedings of the 2019 20th International Carpathian Control Conference (ICCC), Krakow-Wieliczka, Poland, 26–29 May 2019; pp. 1–6. [Google Scholar]
- Han, J.Q. Error analysis of the second order ESO. J. Syst. Sci. Math. Sci. 1999, 19, 465–471. (In Chinese) [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
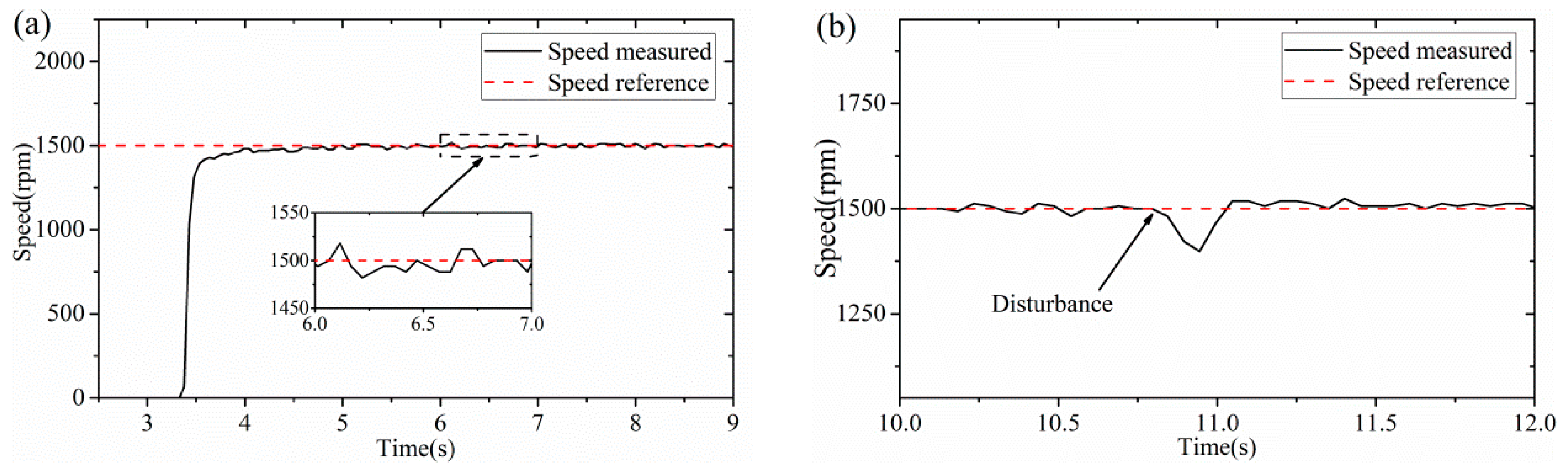
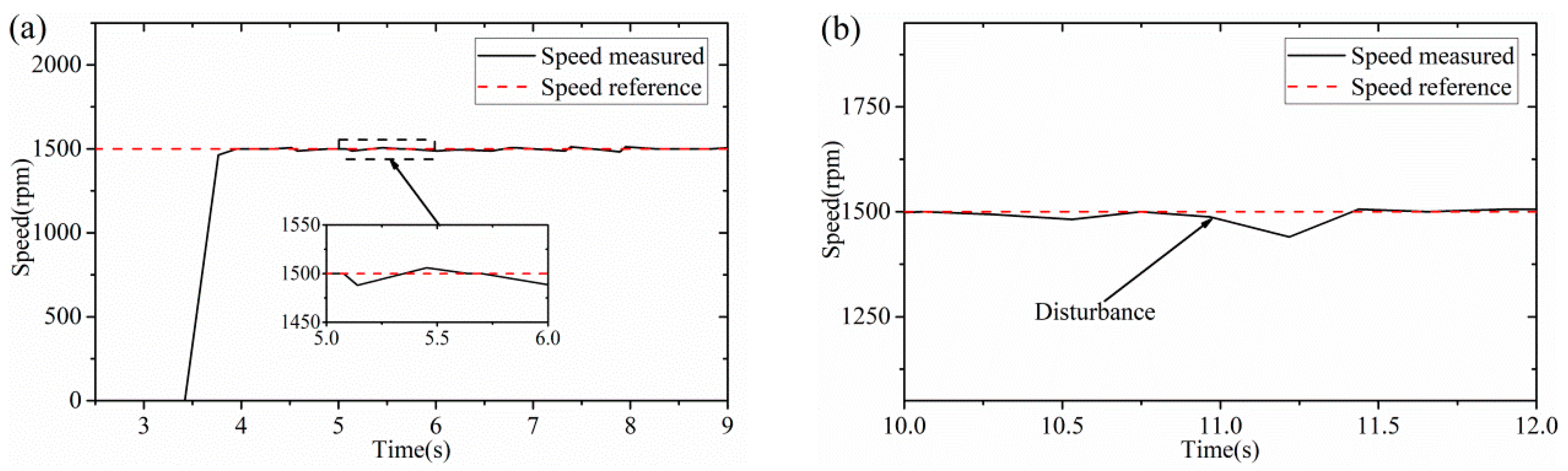
| Control Method | Overshoot | Setting Time | Speed During Disturbance | Steady-State Error | |
|---|---|---|---|---|---|
| Decrease | Increase | ||||
| Speed: PI Current: PI | 26% | 0.3s | −240 rpm | 336 rpm | ±18 rpm |
| Speed: SMC Current: PI | 0% | 1.27s | −246 rpm | 48 rpm | ±12 rpm |
| Speed: SMC + ESO Current: PI | 0% | 1.06s | −112 rpm | 18 rpm | ±12 rpm |
| Speed: SMC + ESO Current: PI + ESO | 0% | 0.531s | −28 rpm | 18 rpm | ±10 rpm |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, Y.; Li, Y. Active Disturbance Compensation Based Robust Control for Speed Regulation System of Permanent Magnet Synchronous Motor. Appl. Sci. 2020, 10, 709. https://doi.org/10.3390/app10020709
Ma Y, Li Y. Active Disturbance Compensation Based Robust Control for Speed Regulation System of Permanent Magnet Synchronous Motor. Applied Sciences. 2020; 10(2):709. https://doi.org/10.3390/app10020709
Chicago/Turabian StyleMa, Yuxiang, and Yunhua Li. 2020. "Active Disturbance Compensation Based Robust Control for Speed Regulation System of Permanent Magnet Synchronous Motor" Applied Sciences 10, no. 2: 709. https://doi.org/10.3390/app10020709
APA StyleMa, Y., & Li, Y. (2020). Active Disturbance Compensation Based Robust Control for Speed Regulation System of Permanent Magnet Synchronous Motor. Applied Sciences, 10(2), 709. https://doi.org/10.3390/app10020709