Escaping Local Minima in Path Planning Using a Robust Bacterial Foraging Algorithm




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- A unique idea of virtual obstacles is introduced that effectively helps the robots to recover from the local minima;
- The information about the virtual obstacles is shared among the whole swarm and can be utilized to pre-plan the route without conflicting with the same local minima;
- The proposed strategy is not computationally intensive; therefore, it can be easily utilized in real-time applications.
2. Preliminaries
2.1. Artificial Potential Field (APF)
2.1.1. Attractive Potential
2.1.2. Repulsive Potential
2.1.3. Total Potential
2.2. Bacteria and Bacterial Foraging Optimization
3. Implementation Details
3.1. The Robot’s Trajectory Process
3.2. Different Shapes of Obstacles
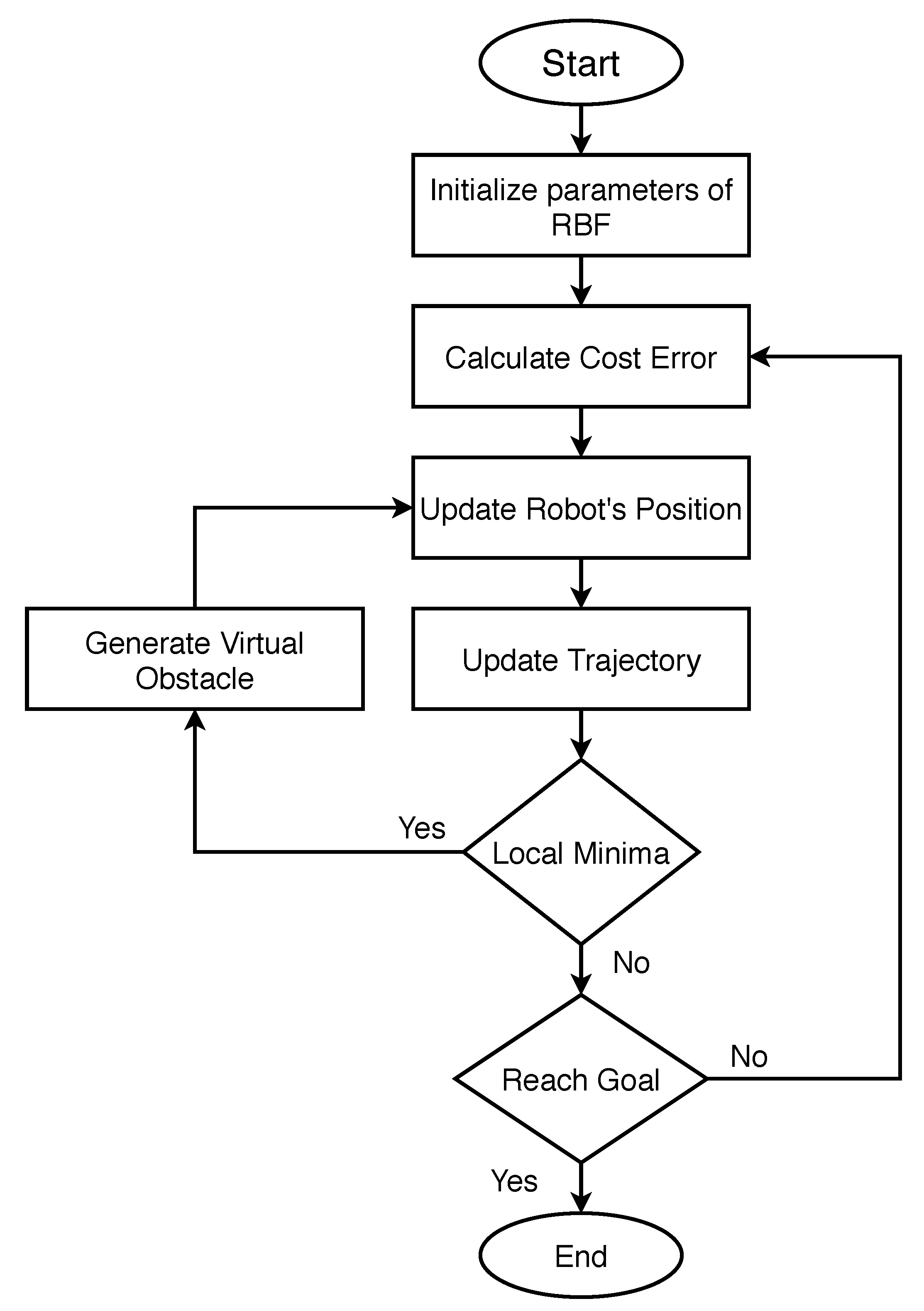
3.3. Robust Bacterial Foraging (RBF) Algorithm
| Algorithm 1 Pseudocode of the robust bacterial foraging (RBF) algorithm. |
| Input: Procedure: Initialize robot position, while while generate random bacterium around q in radius use Equation (9) to calculate the next point; use Equations (10)–(12) to calculate , , and compute error using Equations (13) and (14); endwhile sort cost function error in Equation (14); select best bacterium; save the trajectory, if robot falls in local minima then while endwhile use additional cost function in Equation (15) to reach a specific trajectory point, endif update endwhile Output: Location of the virtual obstacles and trajectory of the robot. |
3.4. Local Minima Criterion
4. Results and Discussion
4.1. Scenario 1: Cases without Local Minima Problem
4.1.1. Case 1: Static and Moving Obstacle
4.1.2. Case 2: Three Obstacles Intercepting the Path
4.1.3. Case 3: An Obstacle on a Direct Path
4.2. Scenario 2: Cases with Local Minima Problem
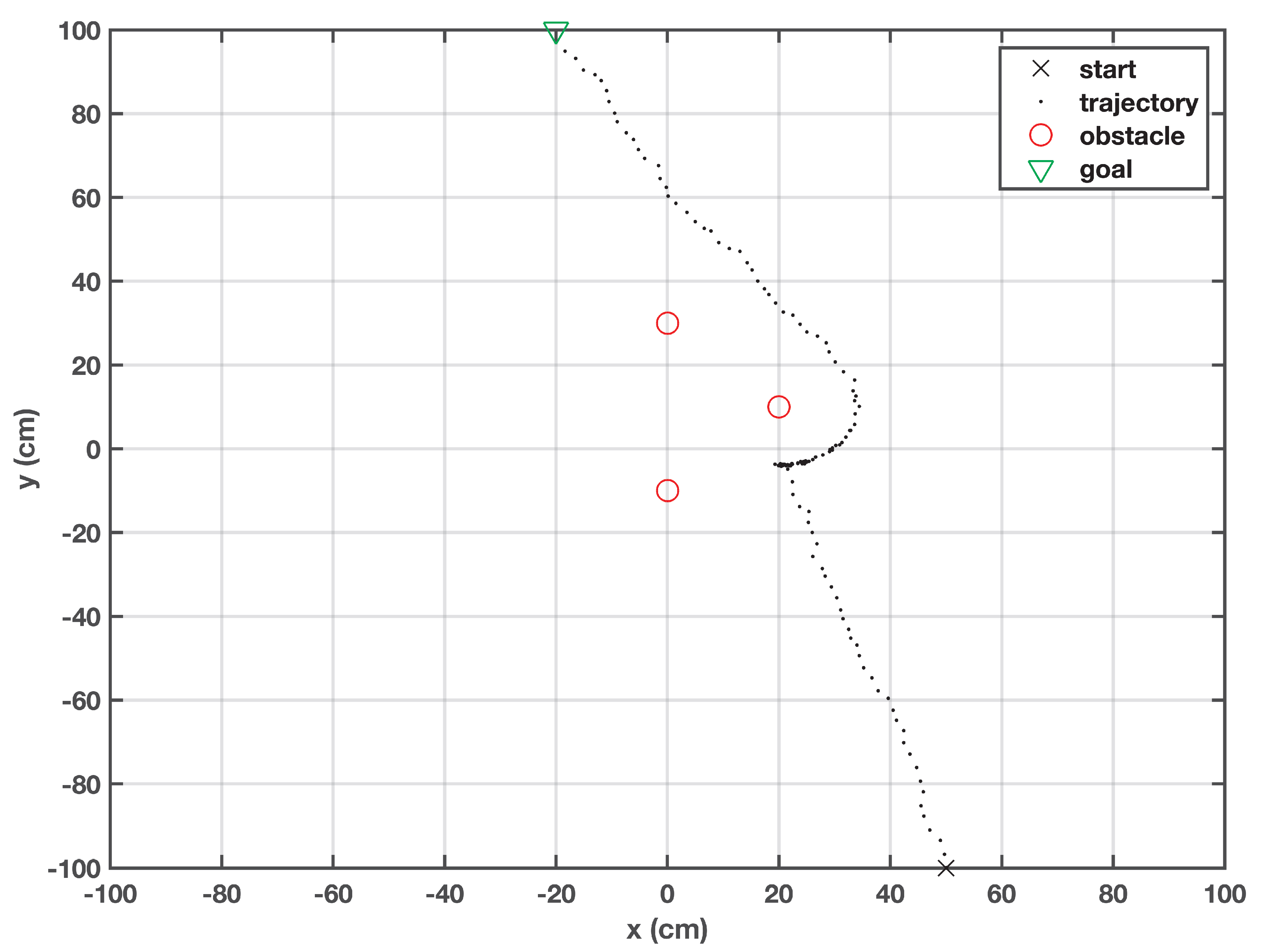
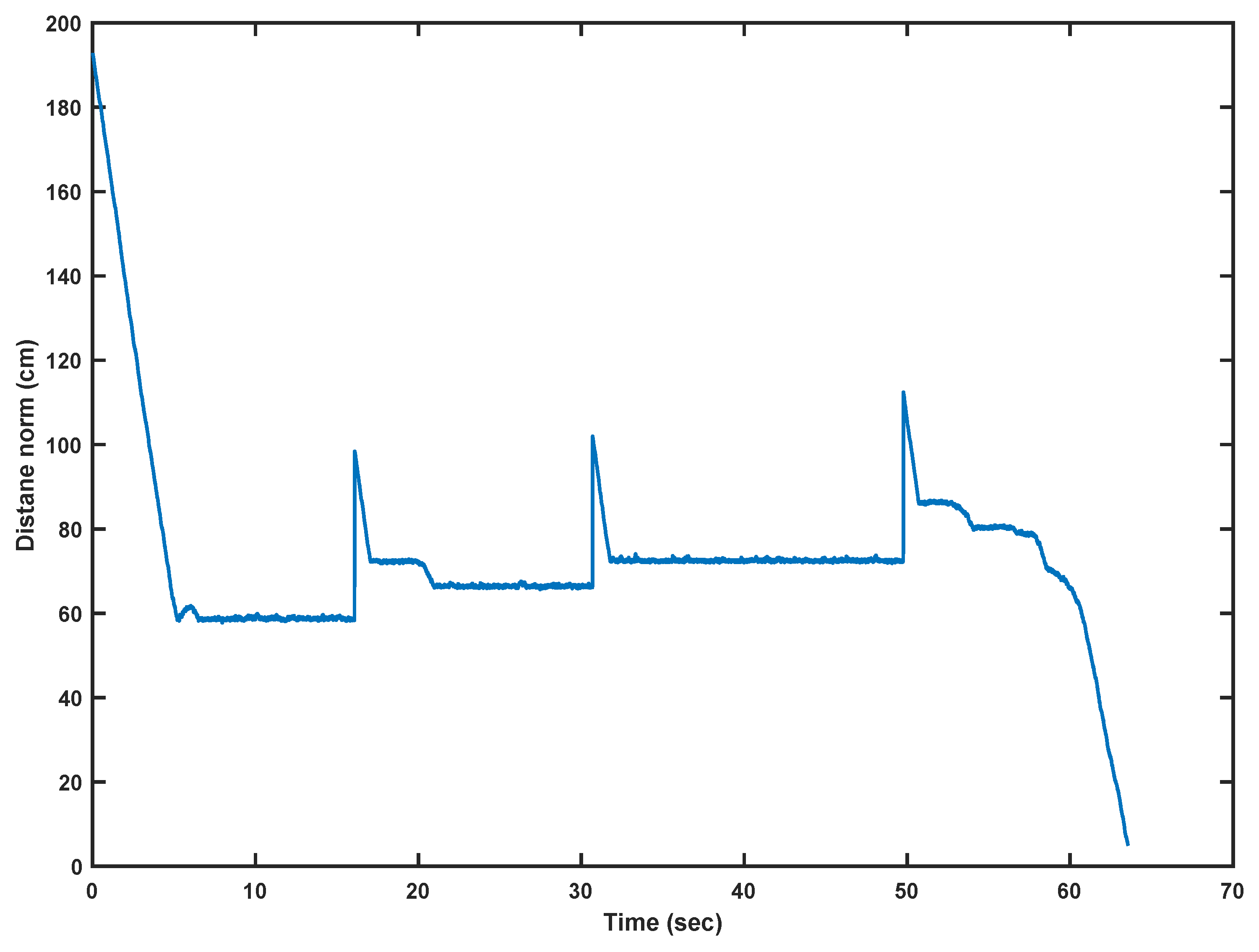
4.2.1. Case 1: Two Circular-Shaped Obstacles Lying Close to Each Other
4.2.2. Case 2: L-Shaped Obstacle
4.2.3. Case 3: U-Shaped Obstacle
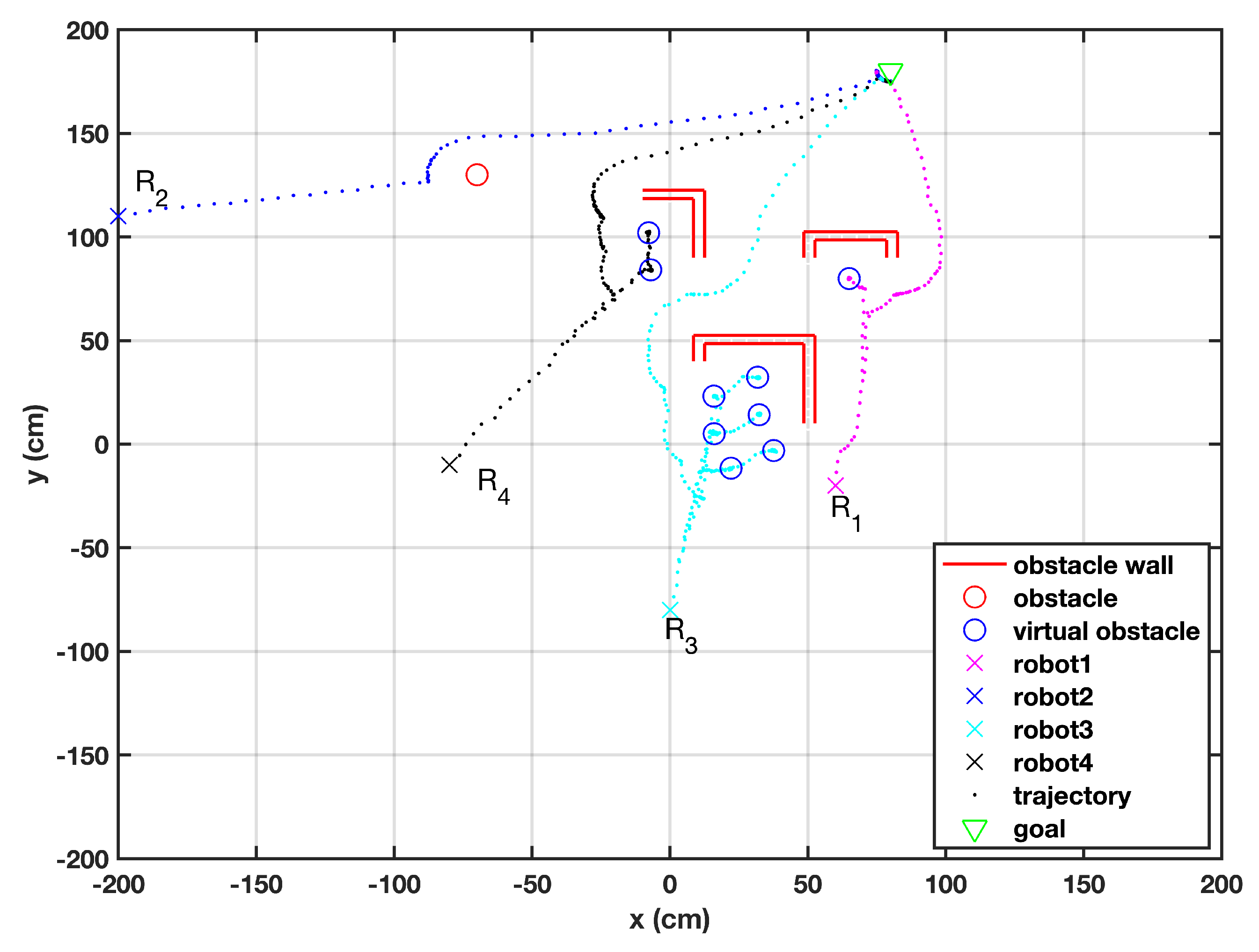
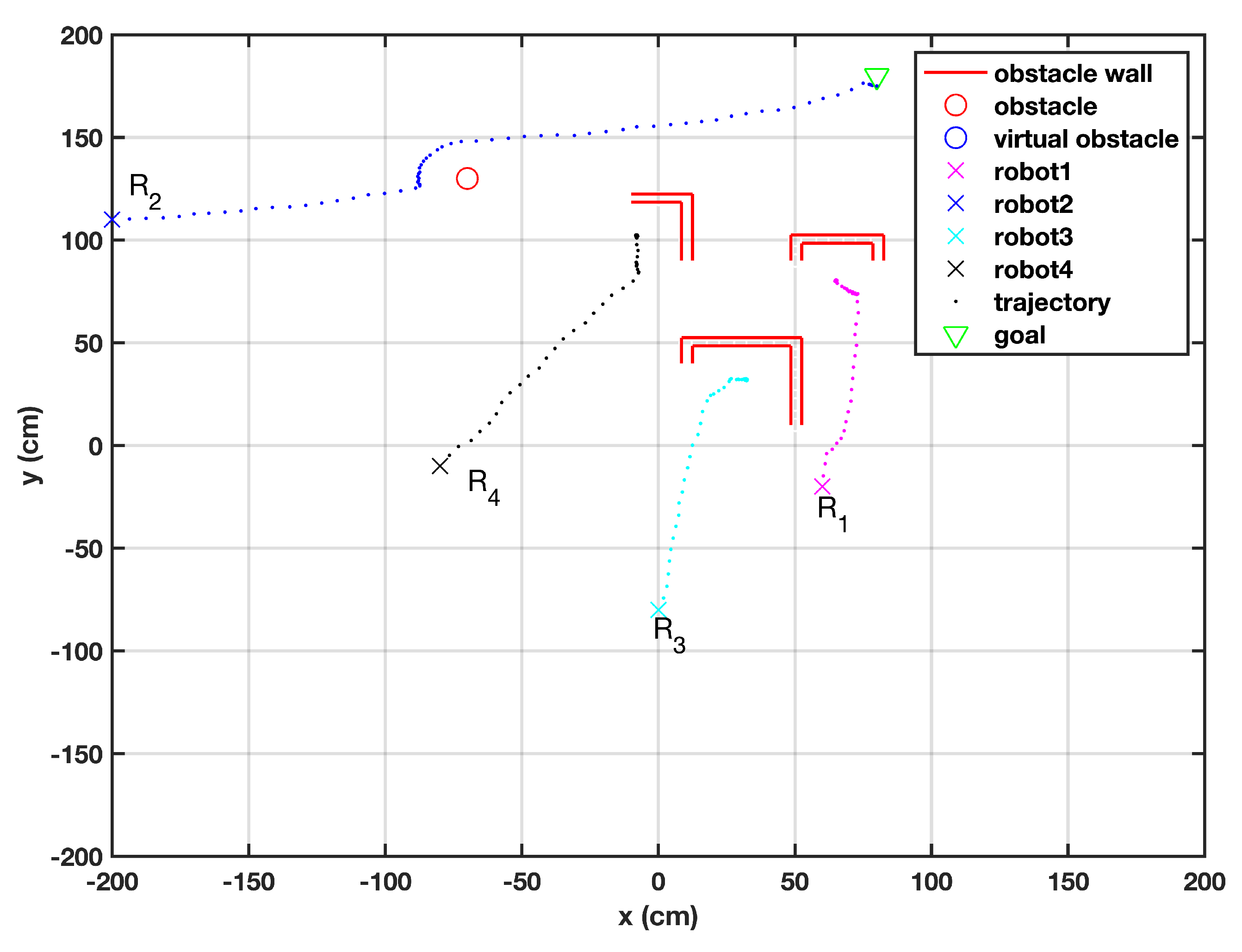
4.2.4. Case 4: Virtual Obstacles’ Information Exchange among the Robots
5. Conclusions and Future Work
- When the starting point is near a local minimum or over a local minimum, the robot becomes unable to return to a specific distance placed in its memory; hence, it stops moving;
- When the robot encounters a closed-form obstacle, it keeps on generating virtual obstacles in order to avoid the actual obstacle. Doing so fills the space with virtual obstacles, disrupting the forward motion.
Author Contributions
Funding
Conflicts of Interest
References
- Goldhoorn, A.; Garrell, A.; Alquézar, R.; Sanfeliu, A. Searching and tracking people with cooperative mobile robots. Auton. Robot. 2018, 42, 739–759. [Google Scholar] [CrossRef] [Green Version]
- Ando, H.; Ambe, Y.; Ishii, A.; Konyo, M.; Tadakuma, K.; Maruyama, S.; Tadokoro, S. Aerial hose type robot by water jet for fire fighting. IEEE Robot. Autom. Lett. 2018, 3, 1128–1135. [Google Scholar] [CrossRef]
- Muijzert, E.; Welker, K.E. Seismic Data Acquisition Using Water Vehicles. U.S. Patent 10,191,170, 29 January 2019. [Google Scholar]
- Mende, M.; Scott, M.L.; van Doorn, J.; Grewal, D.; Shanks, I. Service robots rising: How humanoid robots influence service experiences and elicit compensatory consumer responses. J. Mark. Res. 2019, 56, 535–556. [Google Scholar] [CrossRef]
- Khan, M.U.; Li, S.; Wang, Q.; Shao, Z. CPS oriented control design for networked surveillance robots with multiple physical constraints. IEEE Trans. Comput.-Aided Des. Integr. Circuits Syst. 2016, 35, 778–791. [Google Scholar] [CrossRef]
- Khan, M.U.; Li, S.; Wang, Q.; Shao, Z. Formation control and tracking for co-operative robots with non-holonomic constraints. J. Intell. Robot. Syst. 2016, 82, 163–174. [Google Scholar] [CrossRef]
- Pandey, A.; Pandey, S.; Parhi, D. Mobile robot navigation and obstacle avoidance techniques: A review. Int. Rob. Auto. J. 2017, 2, 00022. [Google Scholar] [CrossRef] [Green Version]
- Abbas, N.H.; Ali, F.M. Path planning of an autonomous mobile robot using directed artificial bee colony algorithm. Int. J. Comput. Appl. 2014, 96, 11–16. [Google Scholar]
- Kavraki, L.E.; Svestka, P.; Latombe, J.; Overmars, M.H. Probabilistic roadmaps for path planning in high-dimensional configuration spaces. IEEE Trans. Robot. Autom. 1996, 12, 566–580. [Google Scholar] [CrossRef] [Green Version]
- Berger, J.; Jabeur, K.; Boukhtouta, A.; Guitouni, A.; Ghanmi, A. A hybrid genetic algorithm for rescue path planning in uncertain adversarial environment. In IEEE Congress on Evolutionary Computation; IEEE: Piscataway, NJ, USA, 2010; pp. 1–8. [Google Scholar]
- Li, S.; Ding, M.; Cai, C.; Jiang, L. Efficient path planning method based on genetic algorithm combining path network. In Proceedings of the Fourth International Conference on Genetic and Evolutionary Computing, Shenzhen, China, 13–15 December 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 194–197. [Google Scholar]
- Hocaoglu, C.; Sanderson, A.C. Planning multiple paths with evolutionary speciation. IEEE Trans. Evol. Comput. 2001, 5, 169–191. [Google Scholar] [CrossRef]
- Zhang, K.; Collins, E.G.; Barbu, A. An efficient stochastic clustering auction for heterogeneous robotic collaborative teams. J. Intell. Robot. Syst. 2013, 72, 541–558. [Google Scholar] [CrossRef] [Green Version]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Alam, M.S.; Rafique, M.U.; Khan, M.U. Mobile robot path planning in static environments using particle swarm optimization. arXiv 2020, arXiv:2008.10000. [Google Scholar]
- Montiel-Ross, O.; Sepúlveda, R.; Castillo, O.; Melin, P. Ant colony test center for planning autonomous mobile robot navigation. Comput. Appl. Eng. Educ. 2013, 21, 214–229. [Google Scholar] [CrossRef]
- Hossain, M.A.; Ferdous, I. Autonomous robot path planning in dynamic environment using a new optimization technique inspired by bacterial foraging technique. Robot. Auton. Syst. 2015, 64, 137–141. [Google Scholar] [CrossRef]
- Das, S.; Biswas, A.; Dasgupta, S.; Abraham, A. Bacterial Foraging Optimization Algorithm: Theoretical Foundations, Analysis, and Applications. In Foundations of Computational Intelligence Volume 3: Global Optimization; Abraham, A., Hassanien, A.E., Siarry, P., Engelbrecht, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; pp. 23–55. [Google Scholar] [CrossRef]
- Mac, T.T.; Copot, C.; Tran, D.T.; De Keyser, R. Heuristic approaches in robot path planning: A survey. Robot. Auton. Syst. 2016, 86, 13–28. [Google Scholar] [CrossRef]
- Tsuji, T.; Tanaka, Y.; Morasso, P.G.; Sanguineti, V.; Kaneko, M. Bio-mimetic trajectory generation of robots via artificial potential field with time base generator. IEEE Trans. Syst. Man Cybern. Part C (Appl. Rev.) 2002, 32, 426–439. [Google Scholar] [CrossRef] [Green Version]
- Khatib, O. Real-Time Obstacle Avoidance for Manipulators and Mobile Robots; Springer: New York, NY, USA, 1986; pp. 396–404. [Google Scholar]
- Barnes, L.E.; Fields, M.A.; Valavanis, K.P. Swarm formation control utilizing elliptical surfaces and limiting functions. IEEE Trans. Syst. Man Cybern. Part B (Cybern.) 2009, 39, 1434–1445. [Google Scholar] [CrossRef]
- Lee, M.C.; Park, M.G. Artificial potential field based path planning for mobile robots using a virtual obstacle concept. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Kobe, Japan, 20–24 July 2003; IEEE: Piscataway, NJ, USA, 2003; Volume 2, pp. 735–740. [Google Scholar]
- Wu, Q.; Chen, Z.; Wang, L.; Lin, H.; Jiang, Z.; Li, S.; Chen, D. Real-Time Dynamic Path Planning of Mobile Robots: A Novel Hybrid Heuristic Optimization Algorithm. Sensors 2020, 20, 188. [Google Scholar] [CrossRef] [Green Version]
- Passino, K.M. Biomimicry of bacterial foraging for distributed optimization and control. IEEE Control Syst. Mag. 2002, 22, 52–67. [Google Scholar]
- Coelho, L.D.S.; Sierakowski, C.A. Bacteria colony approaches with variable velocity applied to path optimization of mobile robots. ABCM Symp. Ser. Mech. 2006, 2, 2972–3304. [Google Scholar]
- Mohajer, B.; Kiani, K.; Samiei, E.; Sharifi, M. A new online random particles optimization algorithm for mobile robot path planning in dynamic environments. Math. Probl. Eng. 2013, 2013, 49134. [Google Scholar] [CrossRef] [Green Version]
- Abbas, N.H.; Ali, F.M. Path planning of an autonomous mobile robot using enhanced bacterial foraging optimization algorithm. Al-Khwarizmi Eng. J. 2016, 12, 26–35. [Google Scholar] [CrossRef]
- Dunias, P. Autonomous Robots Using Artificial Potential Fields. Ph.D. Thesis, Technische Universiteit Eindhoven, Eindhoven, The Netherlands, 1996. [Google Scholar]
- Cook, G. Mobile Robots: Navigation, Control and Remote Sensing; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdi, M.I.I.; Khan, M.U.; Güneş, A.; Mishra, D. Escaping Local Minima in Path Planning Using a Robust Bacterial Foraging Algorithm. Appl. Sci. 2020, 10, 7905. https://doi.org/10.3390/app10217905
Abdi MII, Khan MU, Güneş A, Mishra D. Escaping Local Minima in Path Planning Using a Robust Bacterial Foraging Algorithm. Applied Sciences. 2020; 10(21):7905. https://doi.org/10.3390/app10217905
Chicago/Turabian StyleAbdi, Mohammed Isam Ismael, Muhammad Umer Khan, Ahmet Güneş, and Deepti Mishra. 2020. "Escaping Local Minima in Path Planning Using a Robust Bacterial Foraging Algorithm" Applied Sciences 10, no. 21: 7905. https://doi.org/10.3390/app10217905
APA StyleAbdi, M. I. I., Khan, M. U., Güneş, A., & Mishra, D. (2020). Escaping Local Minima in Path Planning Using a Robust Bacterial Foraging Algorithm. Applied Sciences, 10(21), 7905. https://doi.org/10.3390/app10217905