The oscillation of submarines becomes violent when the sea states worsen; therefore, the effect of sea state 6 on the behavior of emergent buoyantly rising submarine was analyzed in this study, excluding the effect of lower sea states. To investigate the effect of waves, a simulation of a rising submarine in static water was conducted for comparison. All the initial conditions other than the water surface were kept unchanged: the submarine rose from static, the submarine baseline depth was 4 m, the same weight and position of blown loads, and the same metacentric height (
). To investigate the effect of the wave direction, the initial conditions in all the simulations were coincident, except for the initial angle between the submarine centerline and the wave direction.
Table 3 lists the initial conditions for all the simulations, and wave angle means the initial angle between the submarine centerline and the wave direction.
4.1. Effect of Beam Sea
As shown in
Figure 6, the difference in pitch when the submarine rises in static water and beam sea is always below
prior to 5.3 s. When the submarine rises in both static water and beam sea, the submarine sail reaches the water surface at 6.30 s. The maximum pitch angle when the submarine rises in beam sea (
) is only
larger than that when the submarine rises in static water (
). When oscillating on the water surface, the deck of the submarine that rises in the beam sea is always above the water surface, similar to when the submarine rises in static water, as shown in
Figure 7. The beam sea has a slight effect on pitch prior to the submarine sail reaching the water surface, which is consistent with the study of Zhang et al. [
28]. When the submarine rises in static water, the pitching oscillation decays rapidly and the pitch angle is always below
after 12.3 s. When the submarine rises in the beam sea, the pitching oscillation on the water surface does not decay rapidly, and the pitch angle oscillates between
and
. The difference between the pitching oscillating period and the wave period is only 3%; thus, the pitching oscillation is assumed to be caused by the first-order wave force. There is a periodic pitching moment acting on the submarine, mainly due to the yaw changing after the submarine reaches the water surface (the yaw angle is already larger than
at 10 s); therefore, the submarine encounters oblique waves, and the first-order wave force will result in a pitching moment.
As shown in
Figure 8a,b, when the submarine rises in static water, the roll angle is always below
prior to 3.7 s, and slowly increases after 3.7 s; the maximum roll angle prior to the submarine emerging through the water surface is only
. When the submarine rises in the beam sea, the roll angle is
prior to 0.27 s, and the rolling oscillation occurs prior to the submarine rising to the water surface. During the transformation of the water surface above the submarine from peak to valley, the rolling angle velocity increases as a result of the first-order wave force, whereas during the transformation of the water surface above the submarine from valley to peak, the rolling angle velocity decreases owing to the first-order wave force.
As shown in
Figure 8c,d, the beam sea has a slight effect on the axial velocity prior to 5 s. The side velocity oscillates within a range of ±0.1 m/s, which is mainly caused by the first-order wave force. After 5 s, the side velocity continues to oscillate periodically and has a velocity of approximately 0.1 m/s; however, the minimum side velocity is approximately −0.5 m/s. The velocity is significantly larger when the submarine translates to the left side than when the submarine translates to the right, which is mainly due to the effect of the second-order wave force. In addition, the submarine always rolls to the left (the downstream direction of the wave) before reaching the water surface, mainly because of the effect of the second-order wave force. The maximum roll angle when the submarine rises in beam sea (
) is 4.43 times that of when the submarine rises in static water (
), and the rolling oscillation does not decay as quickly as when the submarine rises in static water, despite the oscillating amplitude being equal to approximately
after 12 s.
As shown in
Figure 8e,f, the direction of the rising submarine in the beam sea slightly turns to the right prior to 4.73 s; however, the yaw angle is always below
. After 4.73 s, the submarine starts rapidly heading to the left side (downstream direction of the wave), mainly because the pitch angle during this period is above
and the position of the submarine nose is significantly higher than that of the stern. Thus, the second-order wave force acting on the submarine nose is significantly larger than that on the stern, as the wave amplitude exponentially decays along the depth. After 6.36 s, the sail and most of the submarine bow are in the air and there is no second-order wave force acting on them; however, the stern remains in the water and is affected by the second-order wave force. Thus, the submarine gradually stops turning to the left and starts turning to the right. After the submarine submerges from the top, both the bow and stern are affected by the second-order wave force; however, the force acting on the bow is slightly larger than that on the stern; thus, the yawing angle velocity slightly decreases; however, it is still above zero. During the valley-to-peak transformation of the water surface near the submarine, the bow decreases as a result of the first-order wave force, and the second-order force acting on the stern is larger than that on the bow; thus, the submarine rapidly starts heading to the right. During the peak-to-valley transformation of the water surface near the submarine, the height of the bow is approximately the same as that of the stern, and the second-order force acting on the bow is slightly larger than that on the stern. The yawing angle velocity decreases, but the submarine remains turning to the right. As a result, the yaw angle after 10 s is ascending in a “staircase” manner.
4.2. Effect of Head Wave and Following Wave
As shown in
Figure 9, prior to 1.43 s, the pitching angle velocity
q of the submarine rising in the head wave is always below that of the submarine rising in static water, and the water surface above the submarine sail transforms from peak to valley during this period. During the period between 1.43 and 3.18 s, the pitching angle velocity
q of the submarine rising in the head wave is always larger than that of the submarine rising in static water, and the water surface above the submarine sail transforms from valley to peak during this period. During the period between 3.18 and 6.94 s, the pitching motion of the submarine rising in the head wave has the same rule:
q is larger when the water surface above the submarine sail transforms from valley to peak, or
q is smaller when the water surface above the submarine sail transforms from peak to valley. In addition, prior to the submarine rising to the water surface, the pitching motion law for the following wave is the same as that for the head wave.
When the submarine rises in static water, the pitching oscillation decays rapidly after submerging in water from the highest position, and the absolute value of the pitch after 12.3 s is always below
. When the submarine rises in the head wave, the water surface around the submarine transforms from peak to valley when the submarine submerges from the highest position. Thus, the first-order wave force aggravates the development of the pitch motion and the maximum downward angle of the nose (
) is 23.3% larger than that in static water. Violent pitching oscillation occurs after the submarine falls into the water; the maximum upward angle of the nose prior to 19 s is
whereas the maximum downward angle of the nose prior to 19 s is
; the posture of the submarine maintains its nose in the upward direction for only 2.22 s during the interval 10–17 s. The downward hydrodynamics due to the attack angle is significantly larger than the upward hydrodynamics; as a result, the submarine cannot rise back up to the water surface after falling (as shown in
Figure 10).
When the submarine rises in the following wave, the submarine slowly drops to the water surface from the highest position. As the wave peak spreads from the rear to the submarine and the water surface rises near the nose of the submarine, the nose of the submarine easily glides with the water (as shown in
Figure 11). The wave valley spreads from the rear to the water surface near the submarine after the nose of the submarine falls on the water surface. The large bow-down moment acts on the submarine as a result of the first-order wave force; thus, the maximum bow-down angle of the submarine in the following wave (
) is 1.91 times that of the angle in static water (
). The submarine is always in the nose-up position after 11.62 s; however, the pitching oscillates violently, and the maximum pitch angle is
. The submarine sail cannot rise to the water surface as it does in the head wave. When the submarine rises in the following wave, the wave and submarine sailing directions concide; however, the wave velocity is larger than that of the submarine, and downward hydrodynamics acts on the nose-up submarine as a result of the first-order wave force. The downward force is larger than the sum of blown loads and the wave suction when the submarine is near the water surface; thus, the sail is always below the water surface. The downward force exponentially decays along the depth, and the submarine stops diving when the forces are balanced in the vertical direction. The wave suction acting on the submarine nose is larger than that on the stern. The blown loads are in front of the submarine
, and the downward force is behind the
(the same as when the submarine sails backward); thus, the submarine continuously maintains the nose-up position after 11.62 s.
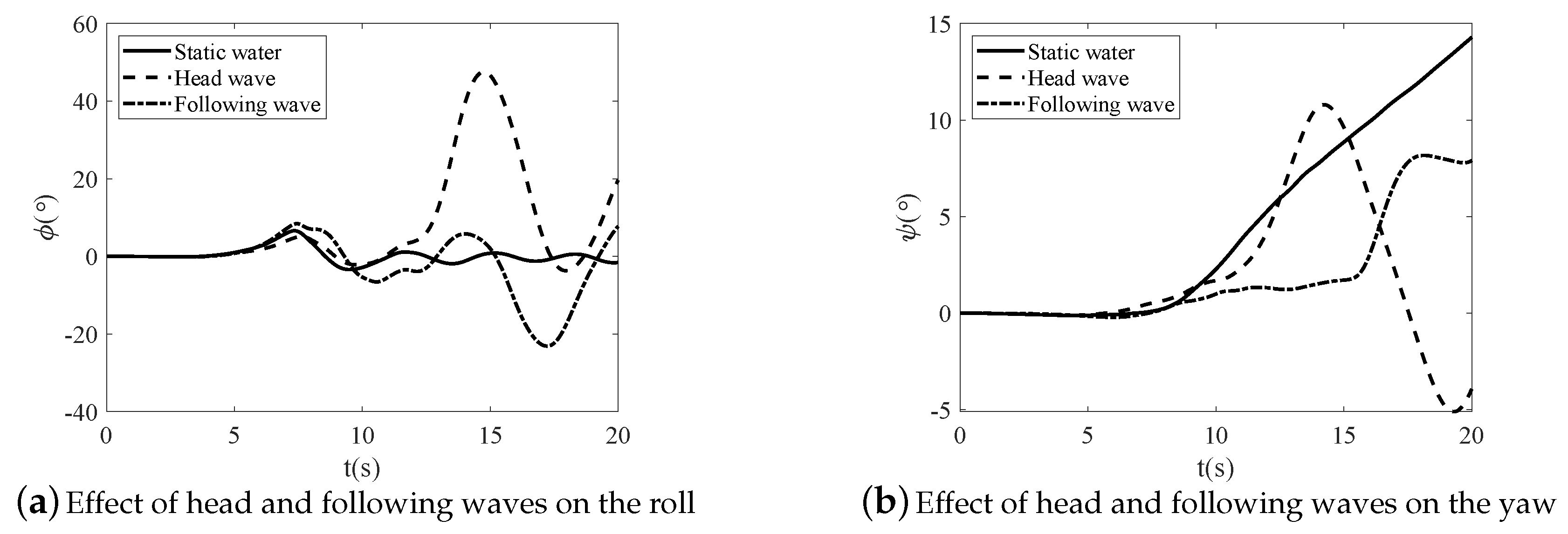
As shown in
Figure 12a, the roll angle of the submarine rises in the head wave and the following wave prior to 5 s is approximately the same as that of the submarine rising in static water. Prior to 10 s, the roll-developing rule of the submarine is the same for three situations, for which the maximum roll angle of the submarine in each situation is presented is below
. As shown in
Figure 12b, prior to 10 s, the developing rule of the yaw angle keeps unchanged and the maximum yaw angle in all three situations are below
. The CFD results indicate that the head and following waves have a slight effect on the transverse motion of the submarine before it falls in the water from the highest position. After falling to water, the yaw angle of the submarine rises in the head wave begins to oscillate. This is mainly caused by the pitching oscillation. The second-order wave force always points downstream, and the wave decays with the increase in depth, so the yawing moment caused by the second-order wave force when the nose is up is in opposite direction to that when the nose is down.
When the submarine rises in static water, the rolling oscillation gradually decays after 10 s, and the roll angle is always below
after 15 s; however, the rolling oscillation quickly develops after 10 s in situations where the submarine rises in the head or following waves. When the submarine rises in the head wave, the yaw angle increases rapidly after 10 s and reaches the maximum value (
) at 14.22 s. The roll angle increases rapidly after the yaw angle starts to increase rapidly as well; the maximum roll angle (
) occurs at 14.74 s. When the submarine rises in the head wave, the rapid increase in the roll angle is due to the following two reasons: first, the submarine experiences an oblique wave as a result of the yaw angle; the components of the first-order wave force in the transverse direction will result in a rolling moment. Second , the side force acts on the sail and main body as a result of the drift angle, and the side force on the sail leads to a large rolling moment because the vertical position of the sail is significantly higher than that of the submarine
. When the submarine rises in the following wave, the moment when the roll angle rapidly increases occurs sooner than that of the rapid increase in the yaw angle. The minimum roll angle
occurs at 17.22 s, and the maximum yaw angle
occurs at 18.12 s. When a submarine rolls to the left, the axial force acts on the sail and main body; the axial force on the sail will lead to yawing to the right. The CFD results indicate that there is a coupling relationship between the roll and yaw motions for emergent buoyantly rising submarines. This is in agreement with an earlier study by Chen et al. [
5] and Zhang et al. [
8].
4.3. Effect of Oblique Waves
This subsection details the effect of oblique waves on the behavior of emergent buoyantly rising submarines. As shown in
Figure 13a,b, the developing pitching rule of a submarine rising in a bow wave is similar to submarines rising in head waves; and the developing pitching rule of submarines rising in quartering waves is similar to submarines rising in following waves. During the rising procedure underwater, when the water surface above the submarine sail translates to a wave valley from a wave peak, the pitching angle velocity, of the submarine,
q, rising in the bow (quartering) wave is larger than that of the submarine rising in static water; otherwise, when the water surface transitions from a wave valley to a wave peak,
q is below the value when the submarine is rising in static water. After 11 s, pitching oscillation occurs when the submarine rises in both the bow wave and quartering wave. The pitch of the submarine rising in
bow wave ranges from
to
, the pitch of the submarine rising in
bow wave ranges from
to
, the pitch of submarine rising in a
quartering wave is always above
, and the pitch of submarine rising in
quartering wave ranges from
to
. During the oscillating procedure, when the submarine rises in the
bow wave, the deck and half of the sail are under the water surface when the submarine experiences a wave peak; both the deck and sail are above the water surface when the submarine experiences a wave valley, as shown in
Figure 14a,b. When the submarine rises in the
bow wave during oscillation, the deck is near the water surface when the submarine experiences a wave peak. Both the deck and sail are above the water surface when the submarine experiences a wave valley, as shown in
Figure 14c,d. When the submarine rises in the
quartering wave during oscillation, the deck and half of the sail are under the water surface when the submarine experiences a wave peak. Both the deck and sail are above the water surface when the submarine experiences a wave valley, as shown in
Figure 15a,b. When the submarine rises in the
quartering wave during oscillation, the bottom of the sail is near the water surface when the submarine experiences a wave peak; the sail and part of the deck could be above the water surface when the submarine experiences a wave valley, as shown in
Figure 15c,d.
As shown in
Figure 13c–f, the effect of an oblique wave on the transverse motion of the emergent buoyantly rising submarine is different from the effect of beam sea. When the submarine rises in beam sea, it rolls to one side during the rising procedure underwater because the effect of the wave force and the maximum roll angle prior to the submarine emerging through the water surface is only
. When the submarine rises in the
bow wave, the maximum roll angle prior to the submarine emerging through the water surface is
. When the submarine rises in the
bow wave, the maximum roll angle prior to the submarine emerging through the water surface is
. When the submarine rises in the
and
bow waves, the pitch angle is larger than that when the submarine rises in static water prior to 4.54 s; however, the pitch angle when the submarine rises in the beam sea is approximately the same as that when the submarine rises in static water. Therefore, the vertical position of the sail when the submarine rises in
and
bow waves is higher than that when the submarine rises in the beam sea. As the wave amplitude exponentially decays with depth, the wave force in the lateral direction acting on the sail of the submarine rising in
and
bow waves is significantly larger than that of the submarine rising in beam sea. The side force acting on the sail results in a large rolling moment because its position is significantly higher than that of the submarine
; therefore, a large roll angle occurred during the rising procedure underwater when the submarine was rising in the
and
bow waves. The maximum roll angle of the rising submarine in the
bow wave (
) was
larger than that of the submarine rising in the beam sea (
). The maximum roll angle of the rising submarine in the
bow wave (
) was
larger than that of the submarine rising in the beam sea (
).
The direction of the submarine turns to the right during the early stages of a submarine rising in and bow waves. The maximum yaw angle prior to 2.38 s of the submarine rising in the bow wave is , and the maximum yaw angle prior to 3.01 s of the submarine rising in the bow wave is . A significant roll angle (larger than ) forms to the left; thus, the rising submarine has a side velocity v () and heads to the left. Consequently, the minimum yaw angles of the submarine rising in the and bow waves are and , respectively. When the submarine rises in the beam sea, it gradually heads to the right after falling on the water surface from the highest position in the and bow waves.
The roll-developing procedure of the submarine rising in the quartering wave is similar to that of the submarine rising in the quartering wave. Prior to 5 s, the roll angle is similar and the maximum roll of the submarine for both situations is below . The maximum roll angle of the submarine rising in the quartering wave () is only smaller than that of the submarine rising in the quartering wave. During the oscillation procedure, the moments of the maximum roll angle and the rolling period for both situations are approximately the same. In addition, the maximum roll angle of the submarine rising in both the and quartering waves, is larger than that of the submarine rising in beam sea. The maximum roll angle of the submarine for the three situations is near . Prior to 11.5 s, the yaw angle of the submarine rising in the quartering wave is significantly close to that of the submarine rising in the quartering wave.
In summary, the effect of the bow wave (quartering wave) on the rule of longitudinal motion is the same as the effect of the head wave (following wave); however, the effect gradually decays when the initial angle between the submarine centerline and wave direction increases. The effect of the oblique wave on the rule of transverse motion is different from the effect of the beam sea as follows: the maximum roll angle of the submarine rising in the bow and quartering waves is larger than that of the submarine rising in beam sea. The direction of the submarine rising in the bow wave turns to the right; however, the direction of the submarine rising in the quartering wave is unstable.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}