State and Parameter Estimation of a Mathematical Carcinoma Model under Chemotherapeutic Treatment





Abstract
:1. Introduction
2. Materials and Methods
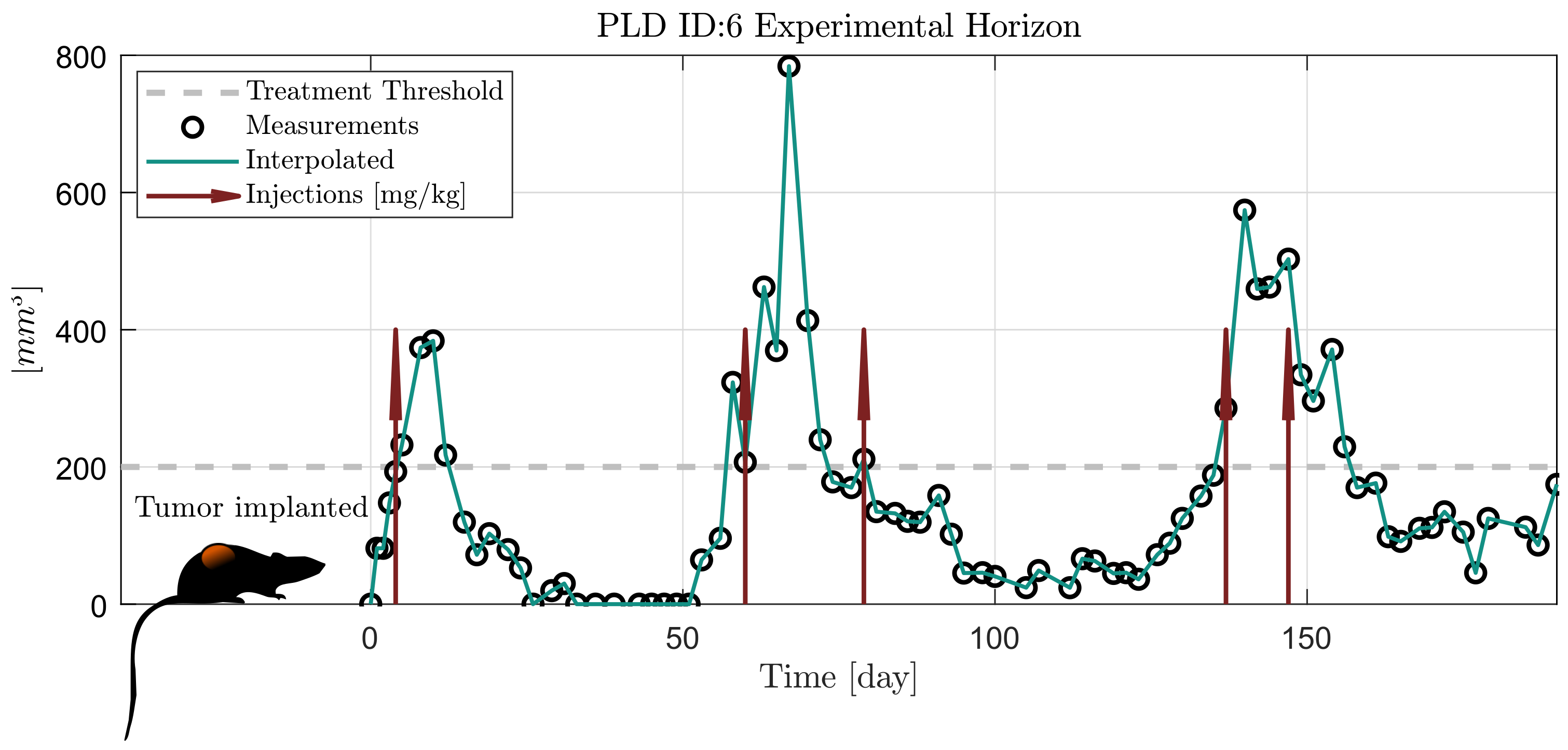
2.1. Experimental Data
2.2. The Applied Tumor Growth Model
2.3. Extended Kalman Filter
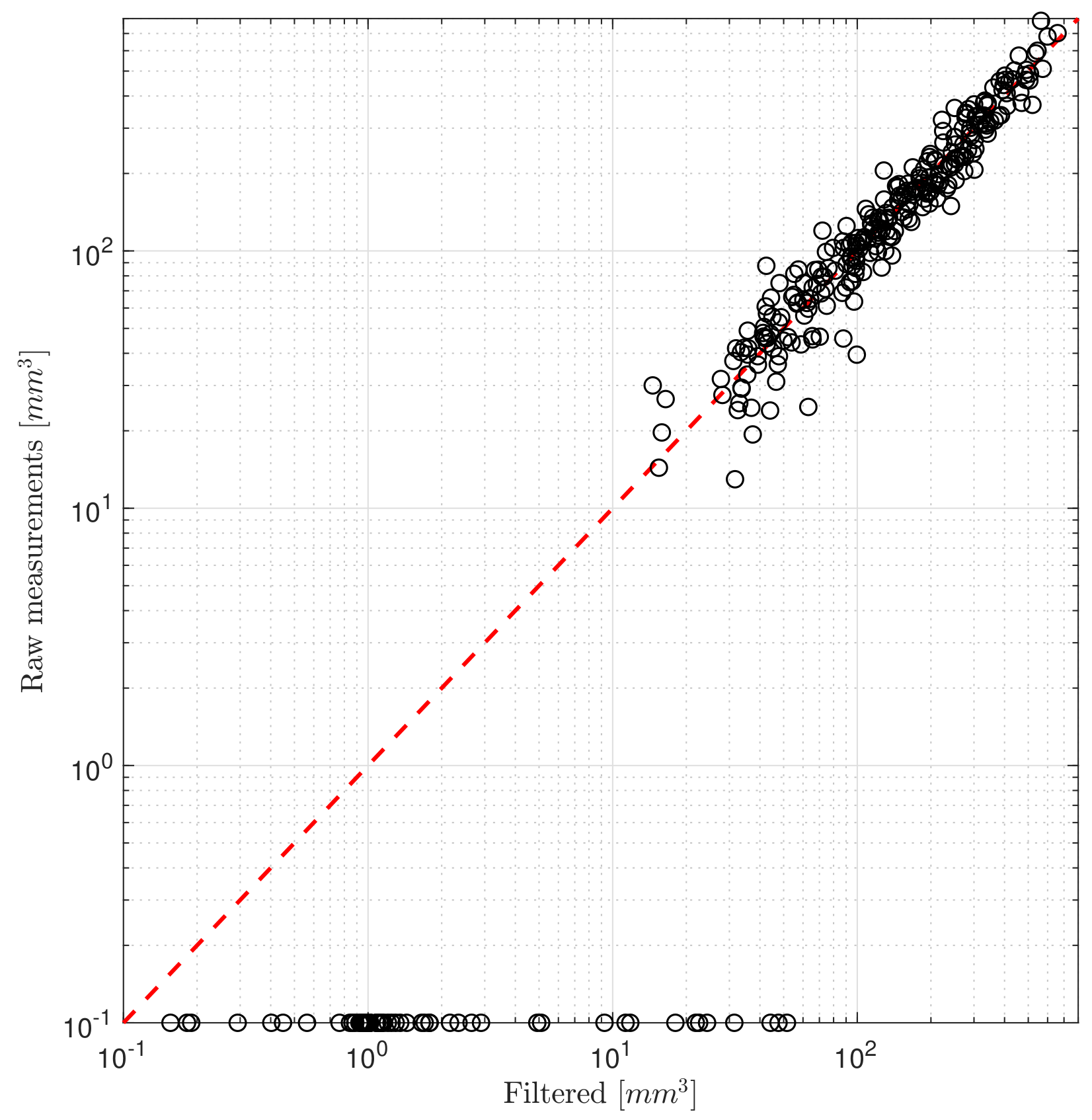
2.3.1. Measurement Noise Characteristics
2.3.2. Kalman Filter Tuning
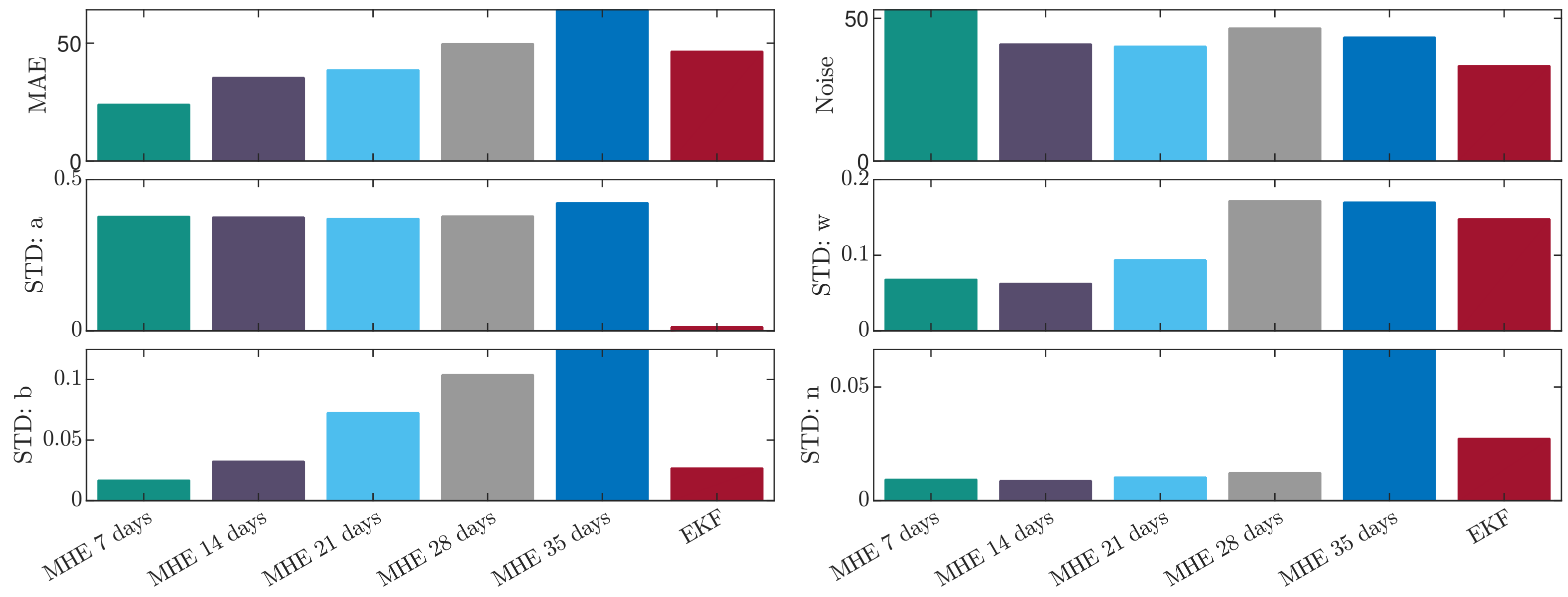
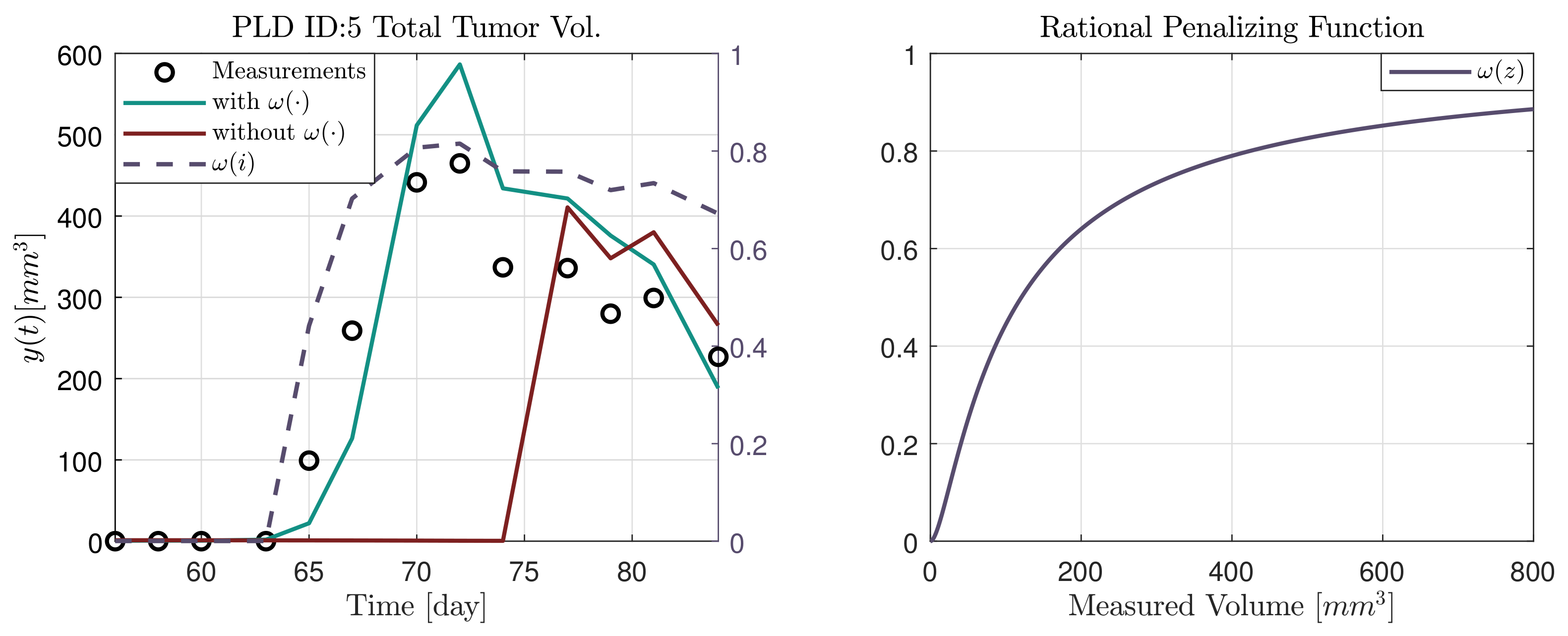
2.4. Moving Horizon Estimation
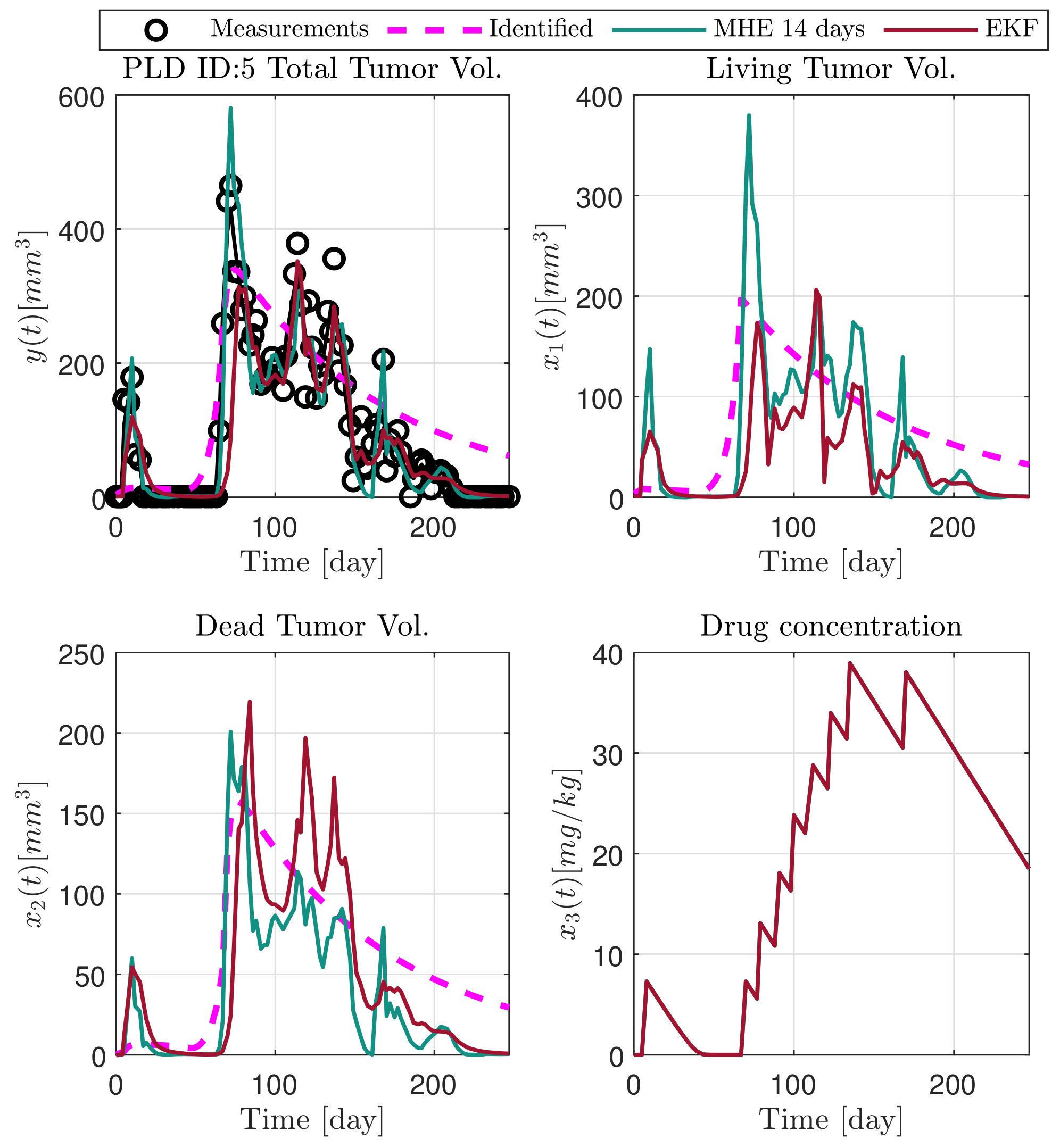
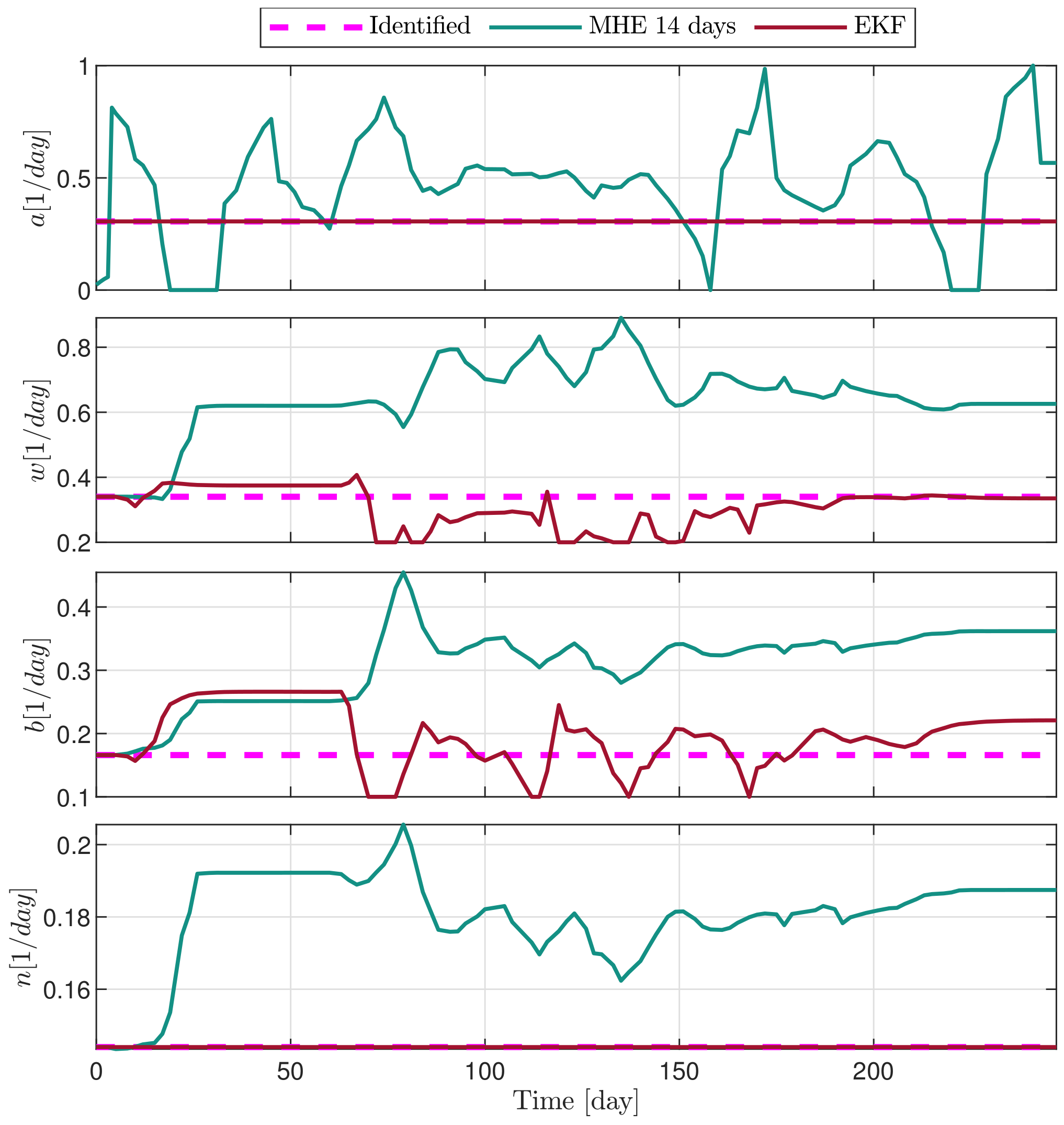
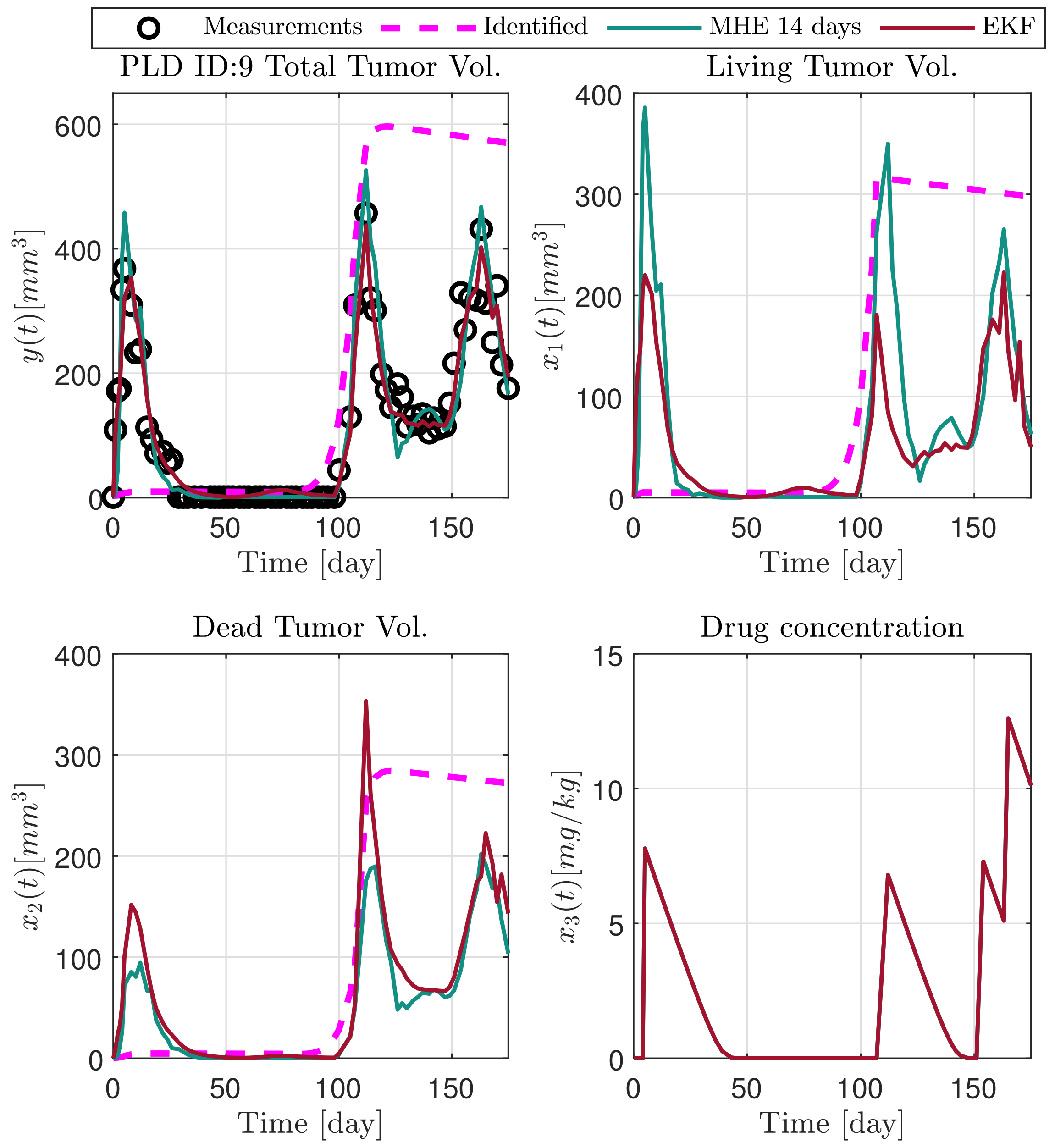
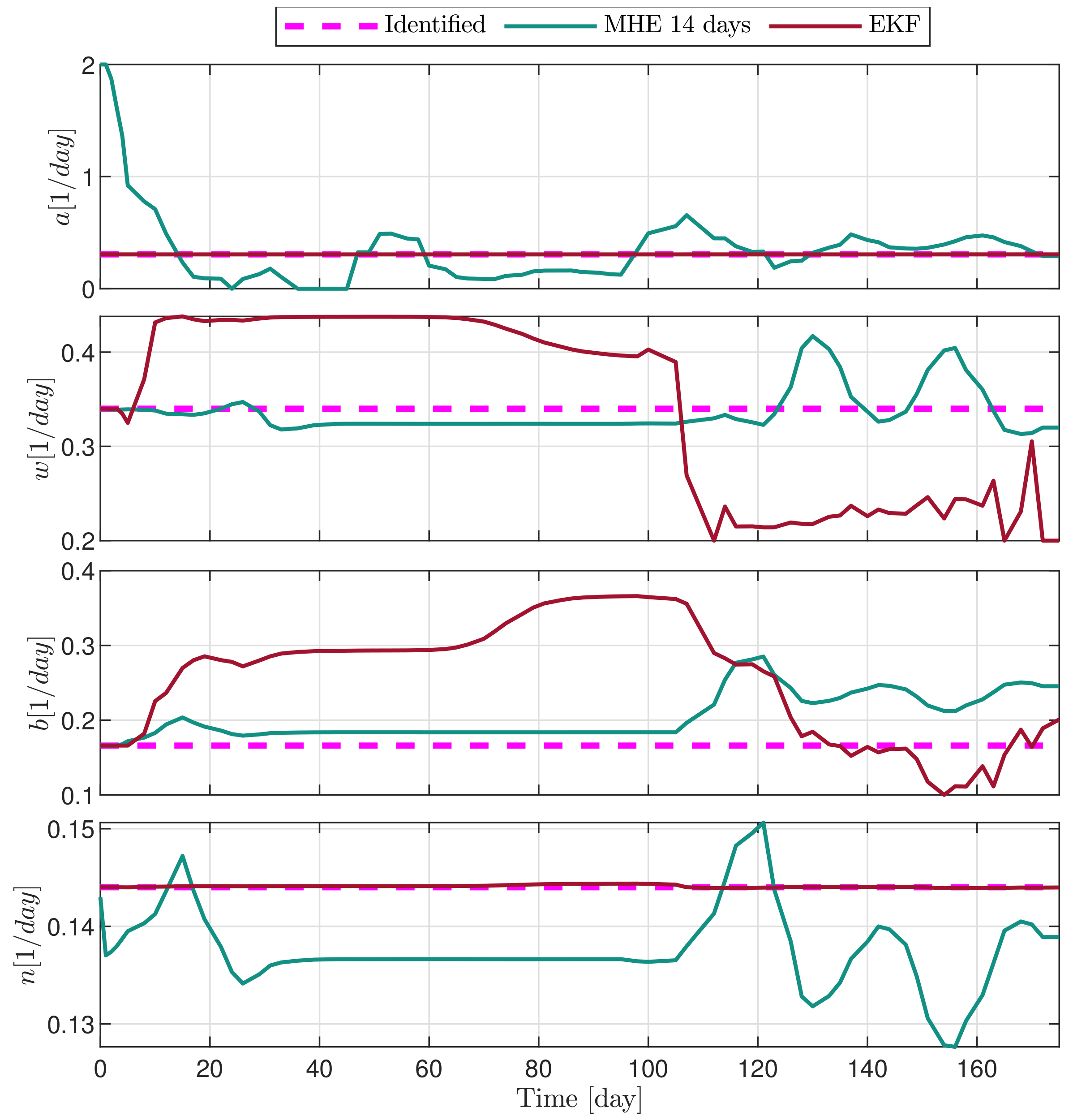
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Ethical Statement
Abbreviations
| EKF | Extended Kalman filter |
| MHE | moving horizon estimation |
| RMSE | root-mean-square error |
References
- WHO: Cancer. Available online: https://www.who.int/news-room/fact-sheets/detail/cancer (accessed on 11 March 2020).
- Ren, H.P.; Yang, Y.; Baptista, M.S.; Grebogi, C. Tumour chemotherapy strategy based on impulse control theory. Philos. Trans. Math. Phys. Eng. Sci. 2017, 375. [Google Scholar] [CrossRef] [PubMed]
- Drexler, D.A.; Ferenci, T.; Kovács, L. Extended tumor growth model for combined therapy. In Proceedings of the 2019 IEEE International Conference on Systems, Man and Cybernetics (SMC), Bari, Italy, 6–9 October 2019; pp. 886–891. [Google Scholar] [CrossRef]
- Hahnfeldt, P.; Panigrahy, D.; Folkman, J.; Hlatky, L. Tumor Development under Angiogenic Signaling. Cancer Res. 1999, 59, 4770. [Google Scholar] [PubMed]
- d’Onofrio, A.; Gandolfi, A. Tumour eradication by antiangiogenic therapy: Analysis and extensions of the model by Hahnfeldt et al. (1999). Math. Biosci. 2004, 191, 159–184. [Google Scholar] [CrossRef] [PubMed]
- Drexler, D.A.; Ferenci, T.; Lovrics, A.; Kovács, L. Modeling of tumor growth incorporating the effect of pegylated liposomal doxorubicin. In Proceedings of the 2019 IEEE 23nd International Conference on Intelligent Engineering Systems, Gödöllő, Hungary, 25–27 April 2019; pp. 369–373. [Google Scholar]
- Drexler, D.A.; Ferenci, T.; Lovrics, A.; Kovács, L. Tumor dynamics modeling based on formal reaction kinetics. Acta Polytech. Hung. 2019, 16, 31–44. [Google Scholar] [CrossRef]
- Kuznetsov, M.; Kolobov, A. Investigation of solid tumor progression with account of proliferation/migration dichotomy via Darwinian mathematical model. J. Math. Biol. 2020, 80. [Google Scholar] [CrossRef] [PubMed]
- Kuznetsov, M. Mathematical Modeling Shows That the Responseof a Solid Tumor to Antiangiogenic TherapyDepends on the Type of Growth. Mathematics 2020, 8, 760. [Google Scholar] [CrossRef]
- Rokhforoz, P.; Jamshidi, A.A.; Sarvestani, N.N. Adaptive robust control of cancer chemotherapy with extended Kalman filter observer. Inform. Med. Unlocked 2017, 8, 1–7. [Google Scholar] [CrossRef]
- Costa, J.M.; Orlande, H.R.; Velho, H.F.C.; de Pinho, S.T.; Dulikravich, G.S.; Cotta, R.M.; da Cunha Neto, S.H. Estimation of Tumor Size Evolution Using Particle Filters. J. Comput. Biol. 2015, 22, 649–665. [Google Scholar] [CrossRef] [PubMed]
- Sápi, J.; Drexler, D.; Harmati, I.; Sápi, Z.; Kovács, L. Qualitative analysis of tumor growth model under antiangiogenic therapy—Choosing the effective operating point and design parameters for controller design. Optim. Control Appl. Methods 2016, 37, 848–866. [Google Scholar] [CrossRef]
- Chen, T.; Kirkby, N.; Jena, R. Optimal dosing of cancer chemotherapy using model predictive control and moving horizon state/parameter estimation. Comput. Methods Programs Biomed. 2012, 108. [Google Scholar] [CrossRef] [PubMed]
- Füredi, A.; Szebényi, K.; Tóth, S.; Cserepes, M.; Hámori, L.; Nagy, V.; Karai, E.; Vajdovich, P.; Imre, T.; Szabó, P.; et al. Pegylated liposomal formulation of doxorubicin overcomes drug resistance in a genetically engineered mouse model of breast cancer. J. Control Release 2017, 261, 287–296. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Drexler, D.A.; Nagy, I.; Romanovski, V.; Tóth, J.; Kovács, L. Qualitative analysis of a closed-loop model of tumor growth control. In Proceedings of the 18th IEEE International Symposium on Computational Intelligence and Informatics, Budapest, Hungary, 21–22 November 2018; pp. 329–334. [Google Scholar]
- Siket, M.; Eigner, G.; Kovács, L. Sensitivity and identifiability analysis of a third-order tumor growth model. In Proceedings of the IEEE 15th International Conference on System of Systems Engineering, Budapest, Hungary, 2–4 June 2020. [Google Scholar]
- Villaverde, A.F.; Barreiro, A. Identifiability of Large Nonlinear Biochemical Networks. MATCH Commun. Math. Comput. Chem. 2016, 96, 259–296. [Google Scholar]
- Iman, R.L. Latin Hypercube Sampling. In Wiley StatsRef: Statistics Reference Online; American Cancer Society: Atlanta, GA, USA, 2014. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | PLD1 | PLD2 | PLD3 | PLD4 | PLD5 | PLD6 | PLD8 | PLD9 | Nominal | SD |
|---|---|---|---|---|---|---|---|---|---|---|
| a [1/day] | 0.333 | 0.307 | 0.307 | 0.310 | 0.289 | 0.299 | 0.308 | 0.311 | 0.306 | 0.0186 |
| b [1/day] | 0.116 | 0.169 | 0.198 | 0.180 | 0.163 | 0.184 | 0.174 | 0.167 | 0.166 | 0.0302 |
| c [1/day] | 0.235 | 0.297 | 0.304 | 0.272 | 0.312 | 0.365 | 0.187 | 0.161 | 0.257 | 0.0820 |
| n [1/day] | 0.115 | 0.148 | 0.153 | 0.173 | 0.134 | 0.161 | 0.133 | 0.145 | 0.144 | 0.0235 |
| 6.15 | 6.05 | 6.02 | 6.10 | 6.19 | 6.16 | 6.17 | 6.11 | 6.12 | 0.404 | |
| [mg/kg] | 0.367 | 0.361 | 0.342 | 0.230 | 0.362 | 0.374 | 0.515 | 0.400 | 0.36 | 0.1242 |
| [ mg/kg] | 8.89 | 9.03 | 10.4 | 13.3 | 8.64 | 7.91 | 7.79 | 8.94 | 9.71 | 1.48 |
| w [1/day] | 0.346 | 0.344 | 0.331 | 0.341 | 0.341 | 0.339 | 0.336 | 0.342 | 0.34 | 0.0253 |
| Penalization | Arguments | ||
|---|---|---|---|
| State | Disturbance | Parameter | |
| Measurement difference | |||
| Modification | |||
| Arrival cost |
| EKF | MHE 7 Days | MHE 14 Days | MHE 21 Days | MHE 28 Days | MHE 35 Days | |
|---|---|---|---|---|---|---|
| PLD3 | 121.6 | 114.6 | 115.5 | 121.5 | 121.4 | 169.5 |
| PLD4 | 72.12 | 32.82 | 48.96 | 59.33 | 60.33 | 103.9 |
| PLD5 | 74.53 | 28.68 | 40.48 | 52.16 | 61.89 | 88.76 |
| PLD6 | 97.93 | 43.46 | 50.15 | 65.97 | 88.49 | 146.1 |
| PLD9 | 59.55 | 49.05 | 55.67 | 61.77 | 72.52 | 86.39 |
| MEAN | 85.14 | 53.73 | 62.16 | 72.16 | 80.94 | 118.9 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Siket, M.; Eigner, G.; Drexler, D.A.; Rudas, I.; Kovács, L. State and Parameter Estimation of a Mathematical Carcinoma Model under Chemotherapeutic Treatment. Appl. Sci. 2020, 10, 9046. https://doi.org/10.3390/app10249046
Siket M, Eigner G, Drexler DA, Rudas I, Kovács L. State and Parameter Estimation of a Mathematical Carcinoma Model under Chemotherapeutic Treatment. Applied Sciences. 2020; 10(24):9046. https://doi.org/10.3390/app10249046
Chicago/Turabian StyleSiket, Máté, György Eigner, Dániel András Drexler, Imre Rudas, and Levente Kovács. 2020. "State and Parameter Estimation of a Mathematical Carcinoma Model under Chemotherapeutic Treatment" Applied Sciences 10, no. 24: 9046. https://doi.org/10.3390/app10249046
APA StyleSiket, M., Eigner, G., Drexler, D. A., Rudas, I., & Kovács, L. (2020). State and Parameter Estimation of a Mathematical Carcinoma Model under Chemotherapeutic Treatment. Applied Sciences, 10(24), 9046. https://doi.org/10.3390/app10249046