Whole-Body Dynamic Analysis of Challenging Slackline Jumping


Abstract
:1. Introduction
2. Materials and Methods
2.1. Experimental Approach to the Problem
2.2. Slackline Study and Data Acquisition
2.3. Conventional Analysis
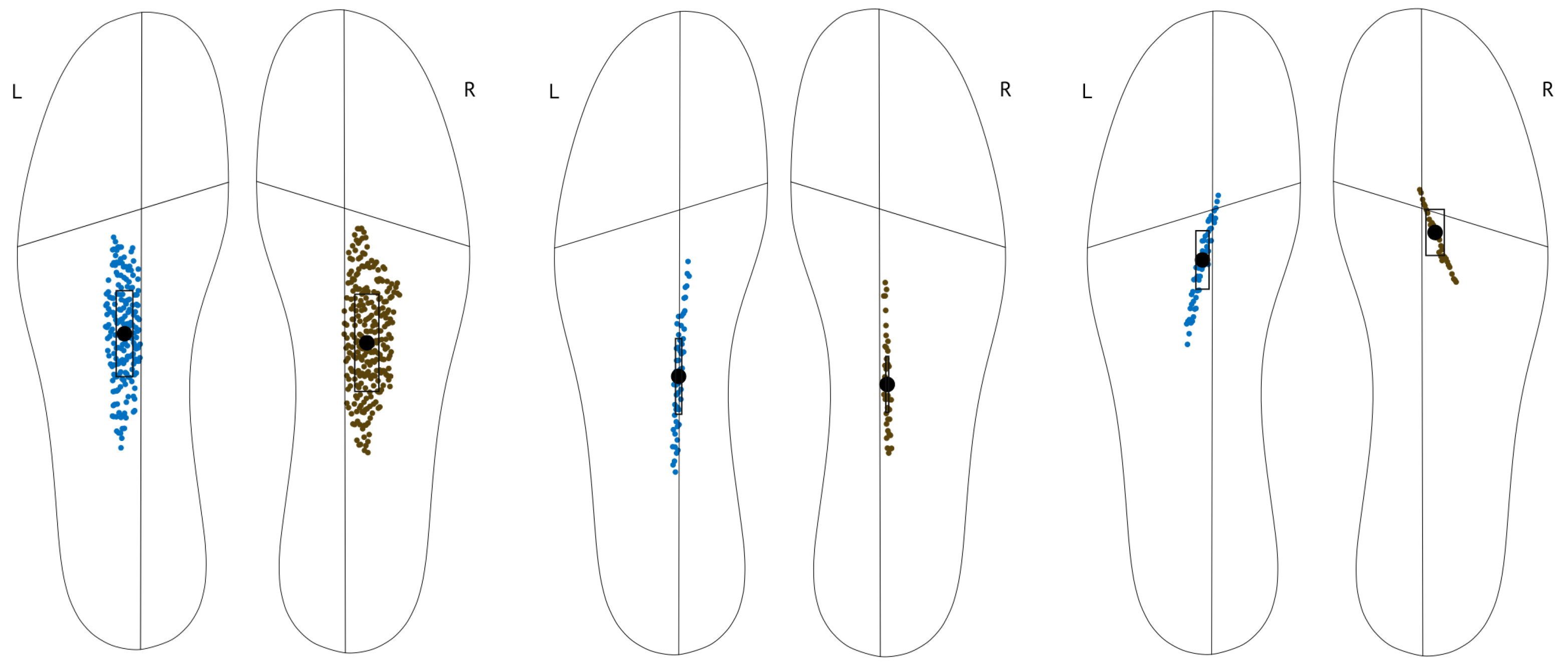
2.4. Experimental Foot Contact Analysis and Modeling—A Pre-Study
- Left: Single leg balancing on regular surface
- Middle: Balancing on the slackline with aligned stance foot
- Right: Balancing on the slackline with turned stance foot
2.5. Proposed Analysis Method
2.5.1. Slackline Contact Modeling
2.5.2. Subject Modeling and Dynamics Computations
2.5.3. Optimal Control Problem Formulation
2.5.4. Validation
- Horizontal momentum is conserved during the flight phase
- Gravity is the only acceleration acting on the CoM during the flight phase
- Angular momentum is conserved during the flight phase
- The change of momentum is proportional to the sum of external forces
- The change of angular momentum is equal to the sum of all acting torques.
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| CoM | Center of Mass |
| CoP | Center of Pressure |
| DoF | Degrees of Freedom |
| EoM | Equation of Motion |
| GRF | Ground Reaction Forces |
| L_SAE | Left Scapula Acromial Edge |
| Number of Degrees of Freedom | |
| NLP | Nonlinear Programming Problem |
| RBDL | The Rigid Body Dynamics Library |
| R_SAE | Right Scapula Acromial Edge |
| OCP | Optimal Control Problem |
| SQP | Sequential Quadratic Programming |
| ZMP | Zero Moment Point |
References
- Paoletti, P.; Mahadevan, L. Balancing on tightropes and slacklines. J. R. Soc. Interface R. Soc. 2012, 9, 2097–2108. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Stein, K.; Mombaur, K. Performance indicators for stability of slackline balancing. In Proceedings of the IEEE/RAS International Conference on Humanoid Robots (Humanoids 2019), Toronto, ON, Canada, 15–17 October 2019. [Google Scholar]
- Winter, D. Human balance and posture control during standing and walking. Gait Posture 1995, 3, 193–214. [Google Scholar] [CrossRef]
- Sutherland, D. The evolution of clinical gait analysis: Part II Kinematics. Gait Posture 2002, 16, 159–179. [Google Scholar] [CrossRef]
- Thompson, L.; Badache, M.; Cale, S.; Behera, L.; Zhang, N. Balance performance as observed by center-of-pressure parameter characteristics in male soccer athletes and non-athletes. Sports 2017, 5, 86. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xu, F.; Li, X.; Shi, Y.; Li, L.; Wang, W.; He, L.; Liu, R. Recent Developments for Flexible Pressure Sensors: A Review. Micromachines 2018, 9, 580. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Karatsidis, A.; Bellusci, G.; Schepers, H.M.; de Zee, M.; Andersen, M.S.; Veltink, P.H. Estimation of ground reaction forces and moments during gait using only inertial motion capture. Sensors 2016, 17, 75. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Emonds, A.L.; Funken, J.; Potthast, W.; Mombaur, K. Comparison of Sprinting with and without Running-Specific Prostheses Using Optimal Control Techniques. Robotica 2019, 37, 2176–2194. [Google Scholar] [CrossRef]
- Stein, K.; Mombaur, K. Optimization-Based Analysis of a Cartwheel. In Proceedings of the 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob), Enschede, The Netherlands, 26–29 August 2018; pp. 909–915. [Google Scholar]
- Leardini, A.; Biagi, F.; Merlo, A.; Belvedere, C.; Benedetti, M.G. Multi-segment trunk kinematics during locomotion and elementary exercises. Clin. Biomech. 2011, 26, 562–571. [Google Scholar] [CrossRef] [PubMed]
- Felis, M. Modeling Emotional Aspects in Human Locomotion. PhD Thesis, Heidelberg University, Heidelberg, Germany, 2015. [Google Scholar]
- Sugihara, T. Solvability-Unconcerned Inverse Kinematics by the Levenberg- Marquardt Method. IEEE Trans. Robot. 2011, 27, 984–991. [Google Scholar] [CrossRef]
- De Leva, P. Adjustments to Zatsiorsky-Seluyanov’s segment inertia parameters. J. Biomech. 1996, 29, 1223–1230. [Google Scholar] [CrossRef]
- Jensen, R.K. Body segment mass, radius and radius of gyration proportions of children. J. Biomech. 1986, 19, 359–368. [Google Scholar] [CrossRef]
- Elftman, H. Forces and Energy Changes in the Leg During Walking. Am. J. Physiol. 1939, 125, 339–356. [Google Scholar] [CrossRef] [Green Version]
- Felis, M.L. RBDL: An efficient rigid-body dynamics library using recursive algorithms. Autonomous Robots 2016, 1–17. [Google Scholar] [CrossRef]
- Kuhl, P.; Ferreau, J.; Albersmeyer, J.; Kirches, C.; Wirsching, L.; Sager, S.; Potschka, A.; Schulz, G.; Diehl, M.; Leineweber, D.; et al. MUSCOD-II Users’ Manual; Interdisciplinary Center for Scientific Computing (IWR): Heidelberg, Germany, 2001. [Google Scholar]
- Leinweber, D.; Bauer, I.; Bock, H.; Schloeder, J. An efficient multiple shooting based reduced SQP strategy for large-scale dynamic process optimization. Part I: Theoretical aspects. Comput. Chem. Eng. 2003, 27, 157–166. [Google Scholar] [CrossRef]
- Bock, H.; Plitt, K. A Multiple Shooting Algorithm for Direct Solution of Ooptimal Control Problems; Pergamon Press: Oxford, UK, 1984; pp. 243–247. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Segment | Parent | DoF |
|---|---|---|
| Pelvis | Root | 6d Floating Base |
| Lower Trunk | Pelvis | RY, RZ |
| Upper Trunk | Lower Trunk | RX, RY |
| Head | Upper Trunk | RZ |
| Upper Arm | Upper Trunk | RX, RY, RZ |
| Lower Arm | Upper Arm | RY, RZ |
| Hand | Lower Arm | Fixed |
| Thigh | Pelvis | RX, RY, RZ |
| Shank | Thigh | RY |
| Foot | Shank | RY |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stein, K.; Mombaur, K. Whole-Body Dynamic Analysis of Challenging Slackline Jumping. Appl. Sci. 2020, 10, 1094. https://doi.org/10.3390/app10031094
Stein K, Mombaur K. Whole-Body Dynamic Analysis of Challenging Slackline Jumping. Applied Sciences. 2020; 10(3):1094. https://doi.org/10.3390/app10031094
Chicago/Turabian StyleStein, Kevin, and Katja Mombaur. 2020. "Whole-Body Dynamic Analysis of Challenging Slackline Jumping" Applied Sciences 10, no. 3: 1094. https://doi.org/10.3390/app10031094
APA StyleStein, K., & Mombaur, K. (2020). Whole-Body Dynamic Analysis of Challenging Slackline Jumping. Applied Sciences, 10(3), 1094. https://doi.org/10.3390/app10031094