1. Introduction
The transmission performance of precision reducers for robots directly affects the kinematic accuracy and repetitive positioning accuracy of robots. The cycloid-pin gear pair is the key component of precision reducers for robots and its meshing performance is important in the evaluation of the comprehensive performance of precision reducers for robots [
1]. In cycloidal-pin gear planetary transmission, in order to compensate the assembly error and maintain reasonable backlash for the conveniences of lubrication and assembly, the theoretical tooth profile of the cycloidal gear is generally machined through the modification design and the tooth profile modification quality is the key to ensure the motion accuracy of precision reducers for robots [
2].
Many experts and scholars have carried out in-depth studies on the profile curve, modification design and meshing characteristics of the cycloidal gear in the precision reducer and have achieved fruitful results. In the aspect of the profile curve characteristics of the cycloidal gear, Litvin and Feng developed a general method for the generation and design of cycloid tooth profile, and avoided the profile and surface singularities of cycloid gear through improving the design [
3]. Yang and Blanche presented the computer-aided analysis and synthesis of cycloid drives and defined the kinematic relationships between tolerance drive parameters and performance indices in detail [
4]. Li et al. proposed a new type of cycloid double-enveloping meshing pair with high transmission accuracy, low backlash and high torsional stiffness [
5]. Sensinger and Jonathon provided a unified set of equations for optimizing the design of cycloid drives and introduced the sources and effects of various tolerances, such as profile reduction, backlash and torque ripple and maximum gear ratio [
6]. Ye et al. established a translation-torsion coupled nonlinear dynamic model with multiple degrees of freedom for a planetary gear train system, and indicated that the load sharing coefficient varied more significantly with the increase in the pressure angle range of gear pair [
7].
In the aspect of tooth profile modification of cycloidal gears, He et al. indicated the requirements of the modification of cycloidal gears used in robots and proposed the optimum mathematics model for the modification of cycloidal gears in order to achieve the high kinematic accuracy, little backlash, high-load capacity, high rigidity and high transmission efficiency of RV reducers [
8]. Ren et al. presented a new method of cycloid disc tooth modification and designed the modification clearance curves by adjusting the positions of five key points according to different modification targets, and they found that the method could improve the carrying capability of cycloidal drive, eliminate noise and vibration and increase the transmission accuracy [
9]. Lin et al. designed a new two-stage cycloidal speed reducer with tooth modifications, studied the profile generation and modifications of cycloidal gears, analyzed the kinematic errors with the tooth contact analysis method and presented the quantitative results of different modification combinations of the gear profile [
10]. Lu et al. found that the cycloidal gear profile modification was sensitive to the backlash of RV reducer and they proposed a modification method of the cycloidal gear tooth profile based on the compensation of deformation, realized the backlash optimization of RV reducers and significantly reduced the gear side clearance caused by the cycloid gear modification [
11]. Nie et al. proposed a new tooth surface topography modification method for spiral bevel gears and corrected the machine settings by establishing the modification mathematical model between the tooth surface deviations and machine settings [
12].
Regarding the meshing characteristics of cycloidal-pin gear pairs, Demenego et al. studied the geometry modification of rotor profiles of a cycloidal pump and determined the virtual pair of contacting profiles, the backlash between the profiles that were not in mesh and the transmission errors in the rotation transformation at any time [
13]. Cao et al. proposed a new method for the gear tooth contact analysis to avoid two considerable disadvantages of the numerical instability and computation process complexity [
14]. Yu et al. proposed an analysis method, called non-Hertz flexibility matrix method (NHFMM), for the tooth contact of the modified profile of pin gear [
15]. Jiang et al. proposed a new method for calculating the cutting force during processing hypoid gears [
16]. Bahk and Parker investigated the impact of tooth profile modification on spur planetary gear vibration, proposed an analytical model and discussed the static transmission error and dynamic response [
17].
From the above studies, it can be seen that the traditional modification design is mainly realized by changing the size and center position of the grinding wheel in the generation process. At present, the gear grinding technology and precision measurement technology are increasingly mature [
18,
19,
20], so the modification methods of cycloidal gears are more flexible [
21] and various tooth profile optimization technologies are available. The profile shape of a cycloidal gear directly affects its transmission performance and the pressure angle distribution on the cycloid profile determines the force transmission performance of gear teeth in meshing. Therefore, in the profile modification design of a cycloid gear and its meshing performance analysis, the pressure angle, the backlash of gear teeth, the tooth tip and root clearance should be considered.
In the study, based on the comprehensive consideration of the profile pressure angle, backlash, tooth tip and root clearance, a new modification method is proposed. Based on the mathematical model for the profile modification of a cycloid gear, the mathematical relationship between the modifications and the pressure angle distribution is established and the meshing performance of the modified tooth profile is discussed in depth. The study provides a new way for the modification design of cycloid gears in precision reducers for robots.
5. Examples and Discussion
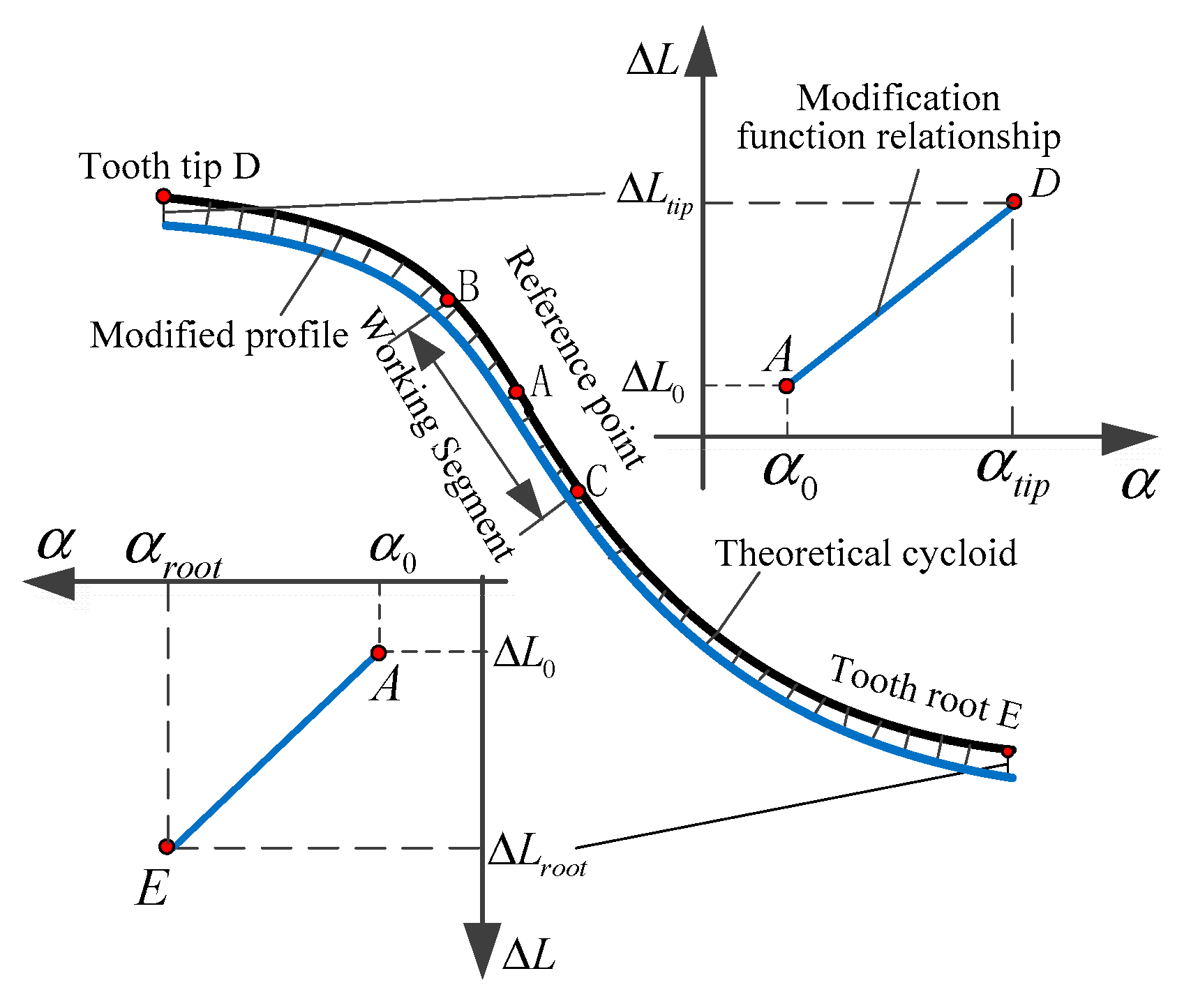
The essence of the modification method in this paper is to obtain different tooth profile shapes by establishing different modification piecewise functions
. In order to compare the different modification piecewise functions
, the function curves obtained by the straight line method, cycloid method and catenary method are plotted in
Figure 11. The geometric parameters of the cycloidal gear are shown in
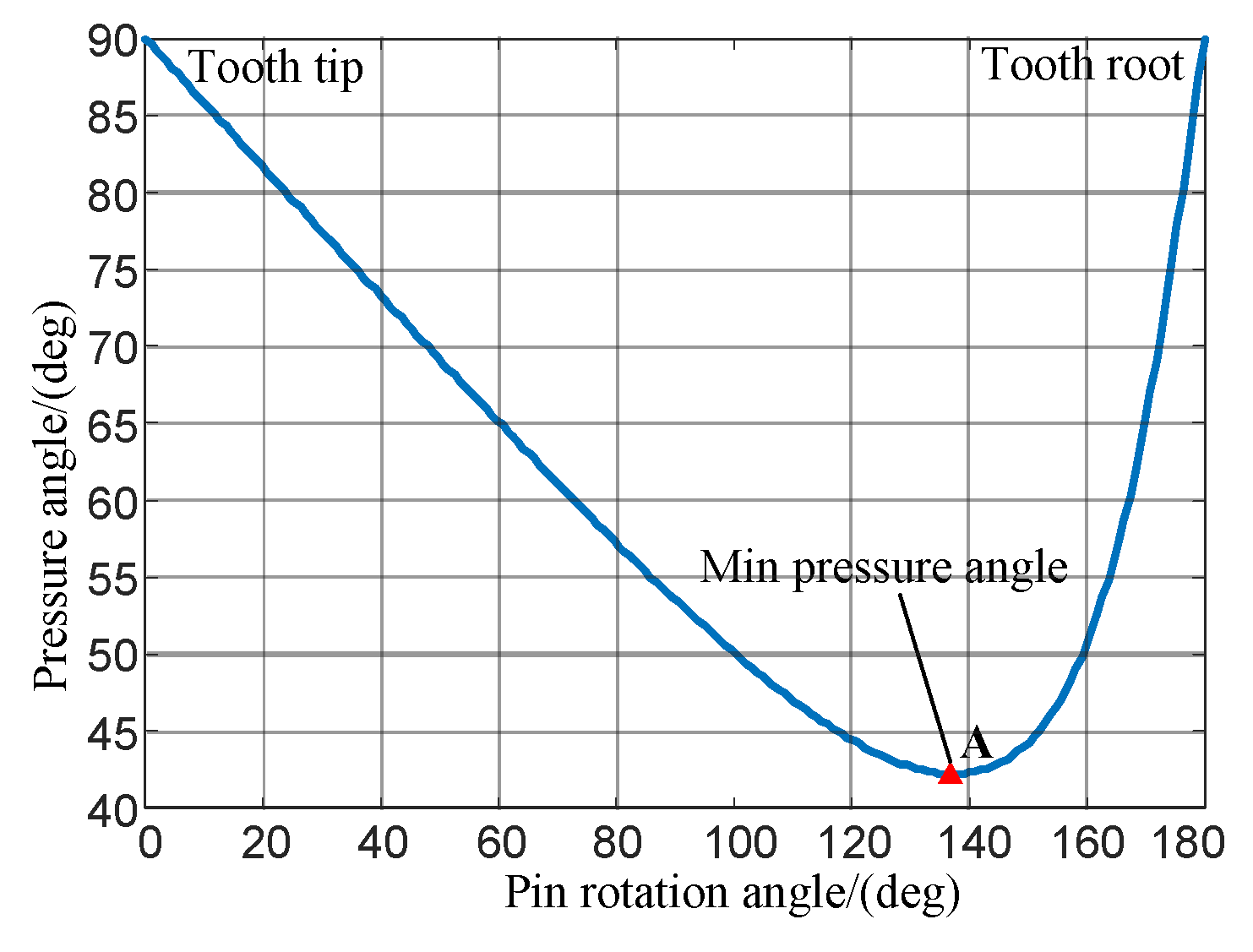
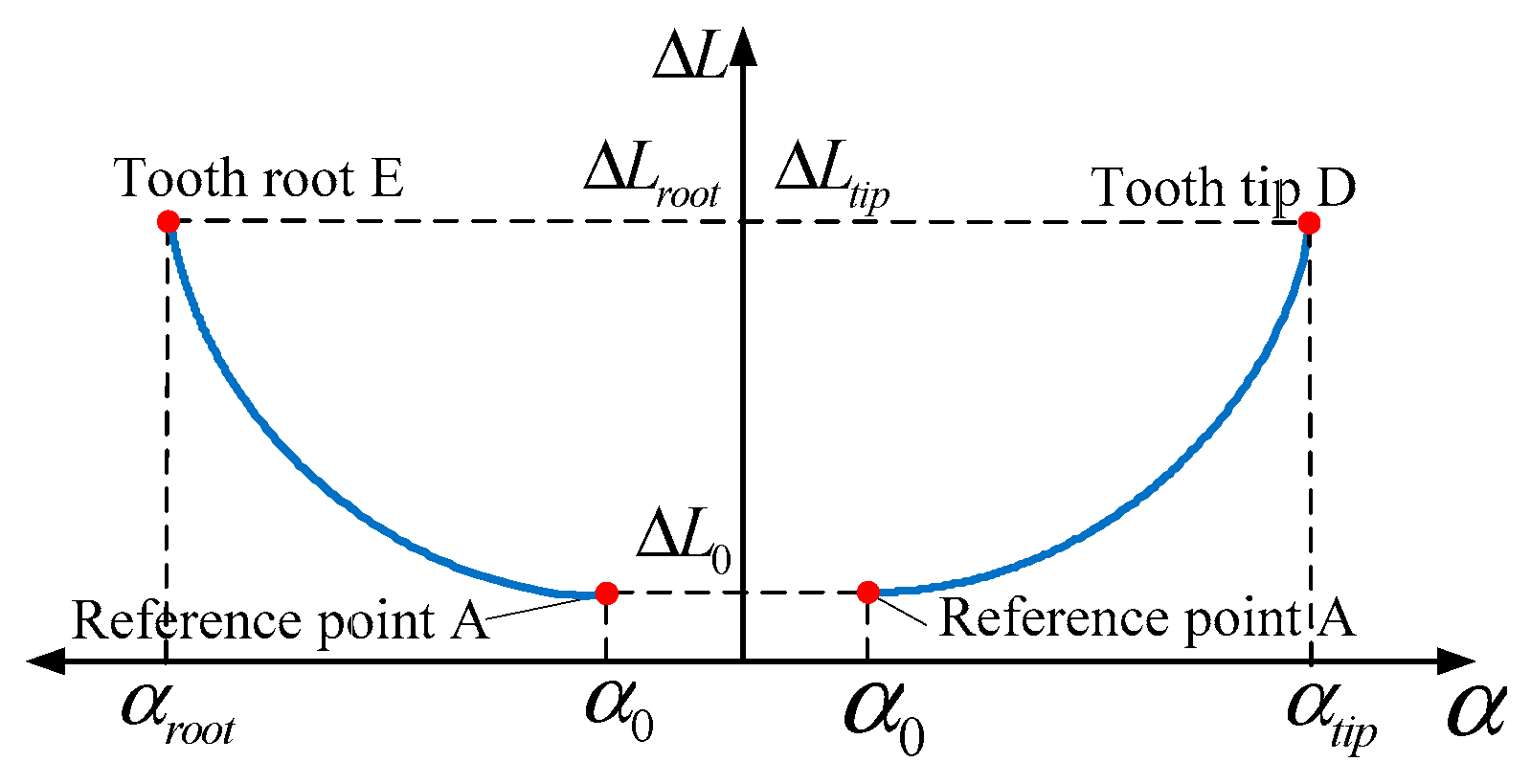
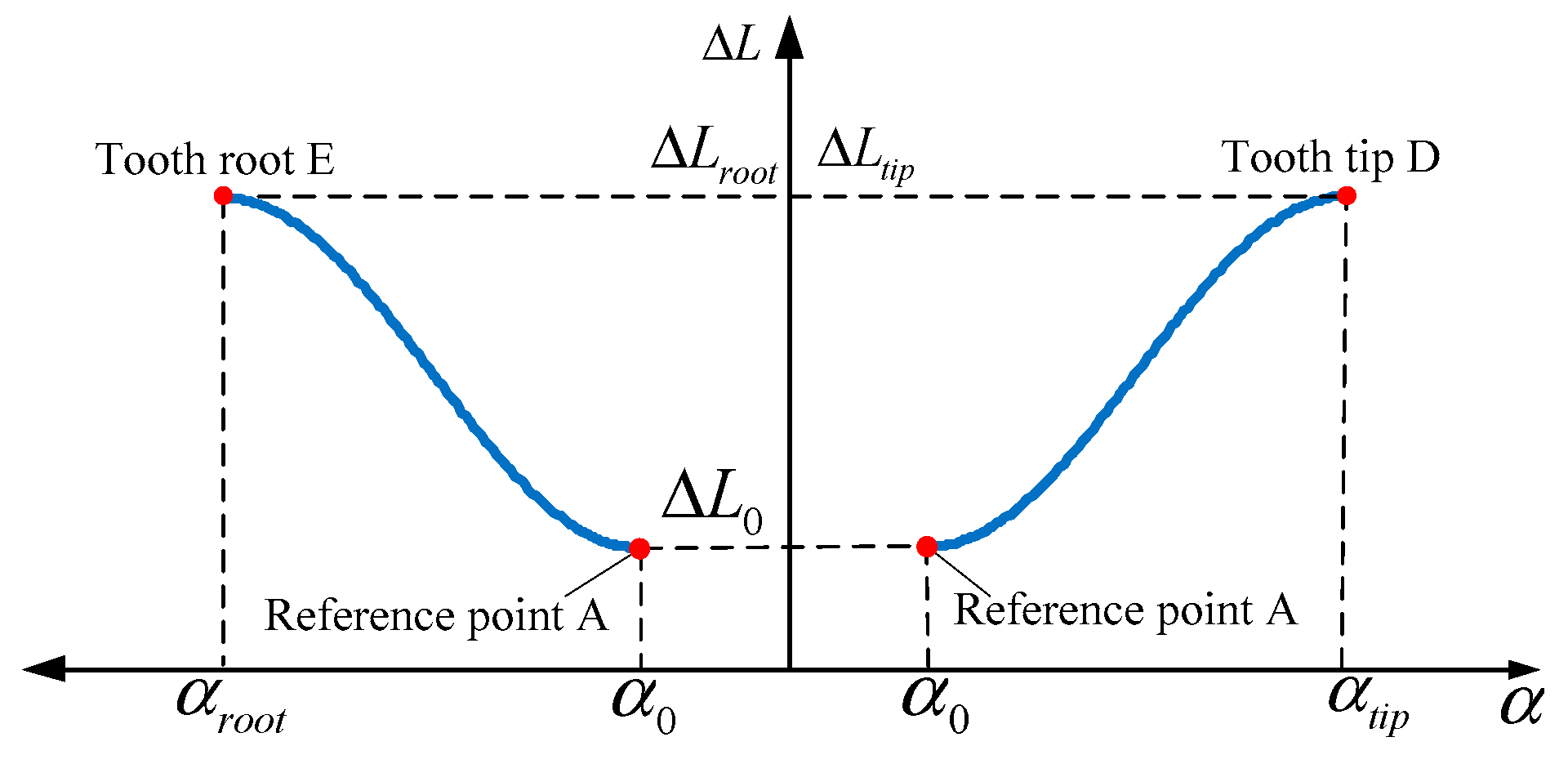
Table 1. According to the requirements of the cycloid-pin transmission, the predetermined tooth tip and root clearance are 0.02 mm and the modification value of the reference point is 0.005 mm. Through calculation, the minimum profile pressure angle is determined to be 42.24°, which is also the pressure angle at the modification reference point. Since the change trend of the modification value from the reference point
A to the tooth tip
D is similar to that from the reference point
A to the tooth root
E, only the function curve from the reference point
A to the tooth tip
D is plotted in
Figure 11. Through substituting the pressure angle and modification value at the reference point and the tooth tip point into Equations (8) and (9), the modification curves are obtained (
Figure 11).
The range of the working section of the cycloid-pin gear in the actual transmission process is relatively small. Similarly, the range of the profile pressure angle in the working section in
Figure 11 is 42.24°~42.45°. In this working section, the modifications calculated by the new method are not much different, and their changes are also slow. Therefore, it can be preliminarily judged that the modified profile near the reference point
A is the closest to the theoretical profile in the meshing area, and the modification effect should be reasonable.
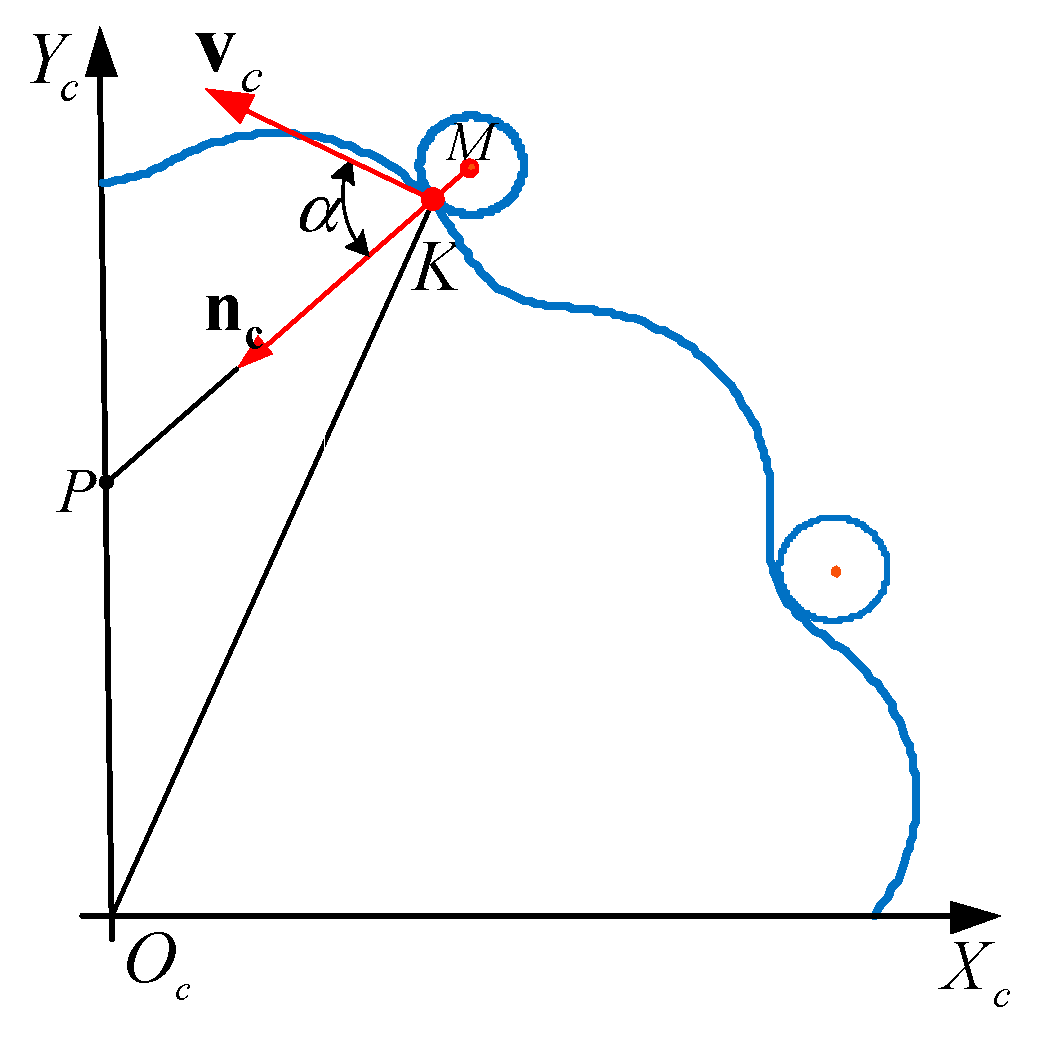
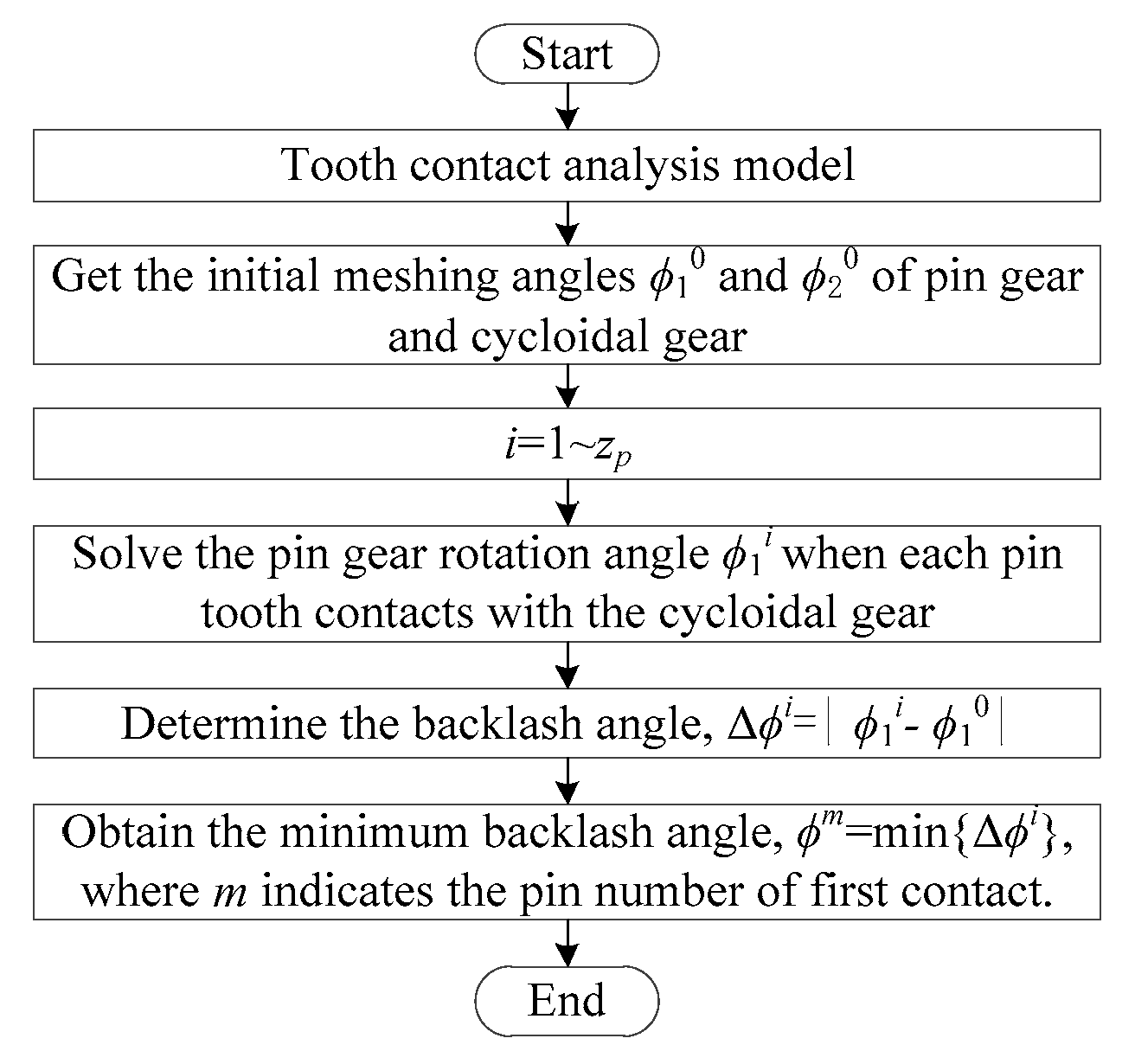
According to Equations (3) and (4), the modifications are superimposed on the normal direction of the cycloidal profile, and the modified tooth profile of the cycloid gear and pin tooth profile in coordinate system
Sc are obtained. With the aid of Equation (10), the meshing contact analysis of the cycloid-pin gear after the modification is completed and the transmission error curve and the minimum backlash angle curve are obtained (
Figure 12 and
Figure 13). The traditional modification method adopts the modification combination of the positive equidistance and the positive displacement. The equidistant modification value is 0.005 mm and the displacement modification is 0.015 mm. These settings can ensure that the initial conditions of the traditional and new modification methods are the same for the convenience of comparison and discussion.
In
Figure 12, the curve segment
BiCi (
i = 1, 2, 3, 4) indicates an engagement period of the modified profile and Points
Bi and
Ci, respectively, correspond to the meshing start and end points of the gear tooth. In the meshing area, the transmission error curves of the modified profiles are smooth and the symmetry is also good. The maximum transmission error of the traditional modification is −1.47 arcsec, which is significantly larger than that of the new method. The transmission error of the tooth profile modified by the second cycloid method is the smallest, which is −0.44 arcsec and indicates the transmission accuracy is higher.
Under the same initial clearance requirements, the minimum backlash angle curve obtained by the new modification method is basically the same and the value of the minimum backlash angle has little difference, reaching approximately 0.6 arcmin (
Figure 13). The minimum backlash angle of the traditional modification method is significantly larger, reaching 0.99 arcmin. In addition, the minimum backlash angle of each modification method corresponds to the No. 31 tooth, indicating that the No. 31 tooth first comes into contact with the cycloidal profile in reverse rotation. It can be determined that the lost motions of the cycloid-pin gear after the modification by the traditional method and the proposed method are 0.6 and 0.99 arcmin, respectively.
The above results indicate that under the same initial clearance requirement, the shape of the modified tooth profile had the greater influence on the transmission error and less influence on the backlash. For the traditional modification method, although the initial clearance condition is the same as that of the proposed method, the modifications of the meshing area cannot be determined in advance, thus resulting in the larger backlash in the meshing area, which indirectly affects the repeated positioning error of the precision reducer.
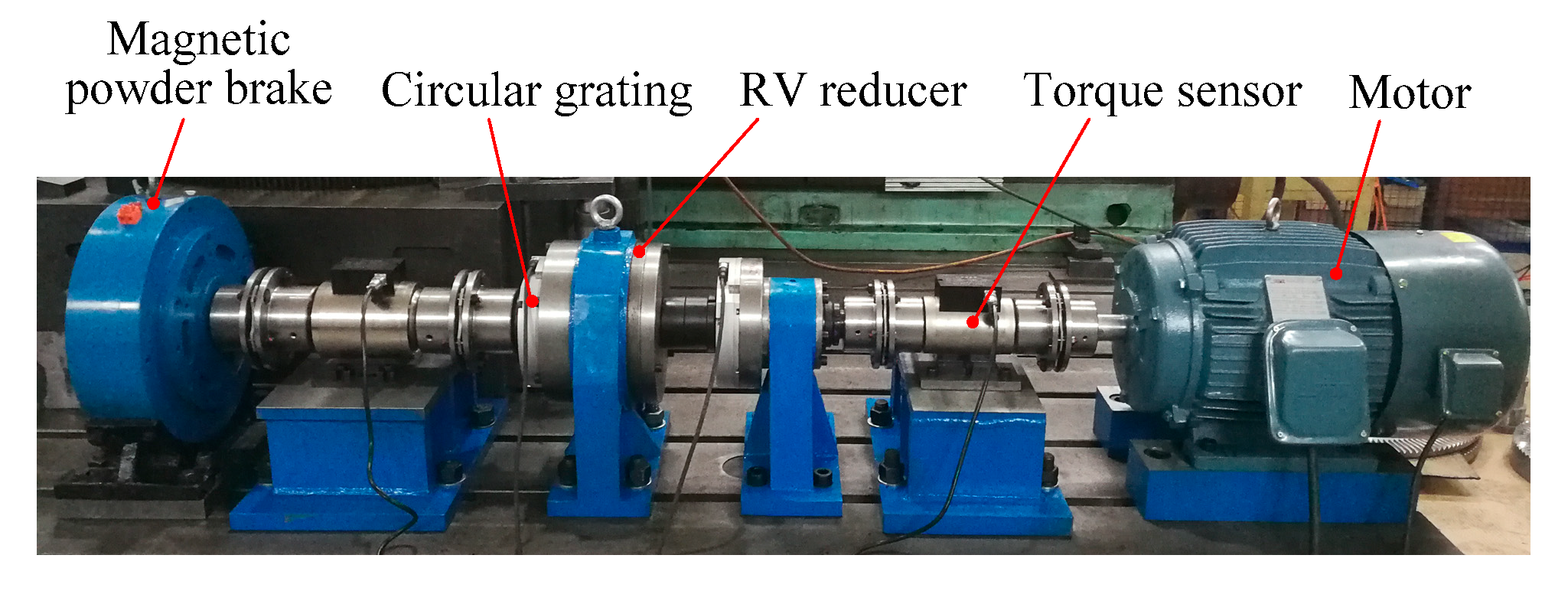
Furthermore, a measurement experiment of the transmission error and the lost motion of the robot precision reducer were carried out on a RV reducer tester shown in
Figure 14. The transmission error and lost motion were measured with the static measurement method [
23]. Under low-speed and no-load conditions, the high-precision circular grating installed at the input and output shafts was used to acquire the angular changes in real time.
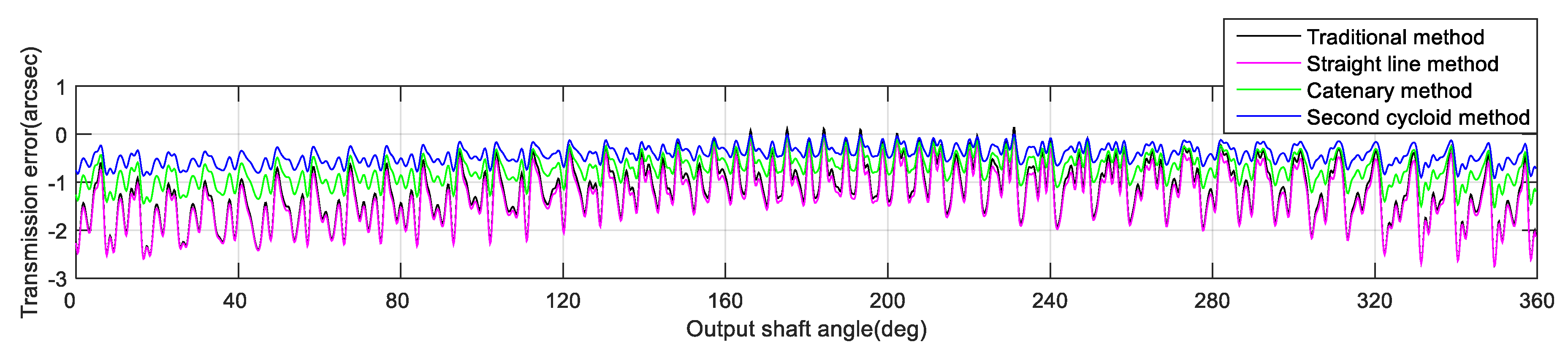
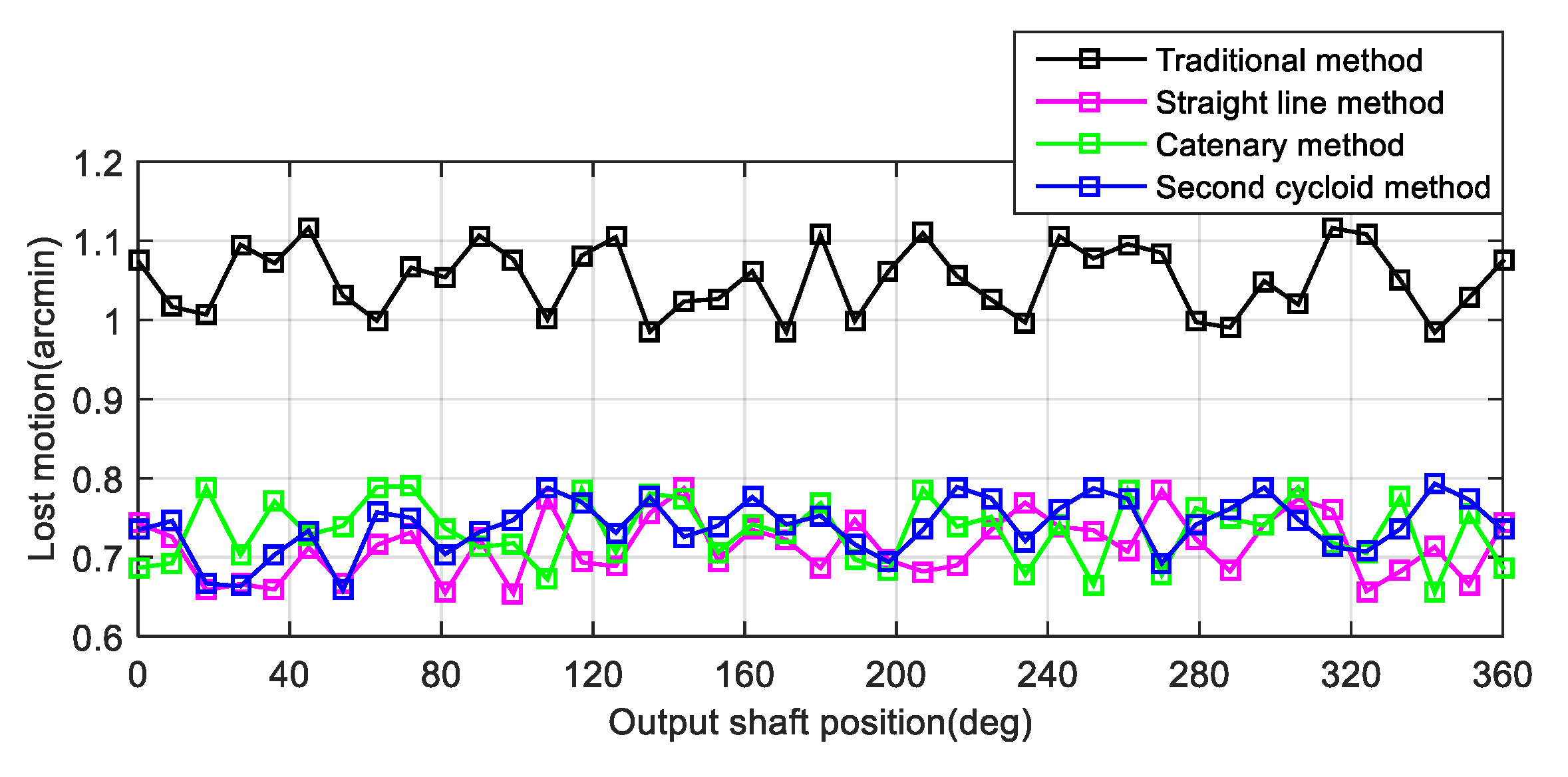
The reducer used in the measurement had 40 pins. Therefore, within the angle range (360°) of the output shaft, the rotation angle of one point was measured every 9° to obtain the actual output rotation angles at 40 positions. The cycloidal gear in this reducer was respectively replaced by the cycloidal gears modified by the traditional method, straight line method, cycloid method and catenary method. Their static transmission error curves and geometric lost motion curves were obtained (
Figure 15 and
Figure 16).
It can be seen from
Figure 12,
Figure 13,
Figure 15 and
Figure 16 that the error values obtained from actual measurements were greater than those obtained from theoretical modeling. The reasons might be as follows. The actual measurement process was affected by many influencing factors, such as installation errors, tooth profile errors, tooth pitch errors, and radial runout. The combined effects of these factors were complex and could not be accurately determined. However, before the test, a series of measures were taken to minimize these effects. For example, through the adjustment and detection of the tooling and precision instruments for many times, the high installation accuracy could be ensured. Through many times of precision grinding, the high processing accuracy could be ensured (the maximum profile and pitch errors of the cycloidal gear were respectively limited to 0.02 mm and 0.006 mm). However, we can see that the overall trends of transmission errors and backlashes measured in actual measurements are similar to the results of the theoretical modeling. The changing trend of the transmission error and lost motion of the new modification method is significantly smaller than that of the traditional modification. Among them, the transmission error after the second cycloid method is the least and the lost motions of the straight line method and the traditional method are basically the same.
In summary, compared with the tooth profile obtained with the traditional modification method, the modified tooth profile obtained by the proposed method can reflect smaller transmission error and backlash, indicating the higher motion accuracy and repeated positioning accuracy. Based on the working conditions and transmission requirements of robot reducers in engineering practices, the appropriate modification function can be selected to carry out the modification design of the cycloidal gear.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}