An Experimental Tuning Approach of Fractional Order Controllers in the Frequency Domain





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Proposed Tuning Method
- The minimum number of equations needed, denoted by n, depends on the complexity of the chosen controller. The minimum n should be greater or equal than the number of parameters that need to be tuned.
- A constrained routine can be chosen to perform the optimization such that one of the equations from the system is minimized, while the other equations are regarded as constraints.
- As in any optimization algorithm, the developed solution depends on the chosen starting point and the initial points should be chosen realistically. For example, in the case of a fractional-order differentiation, the derivative order belongs to the interval .
- integer order PI controller
- integer order PD controller
- fractional-order PI controller
- fractional-order PD controller
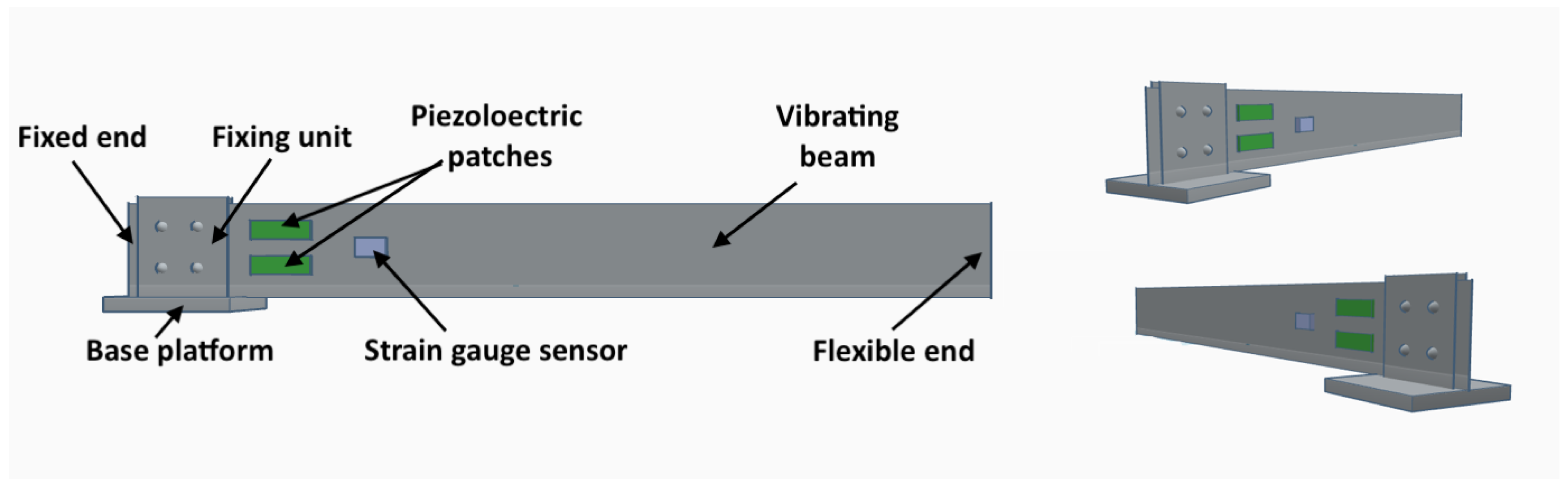
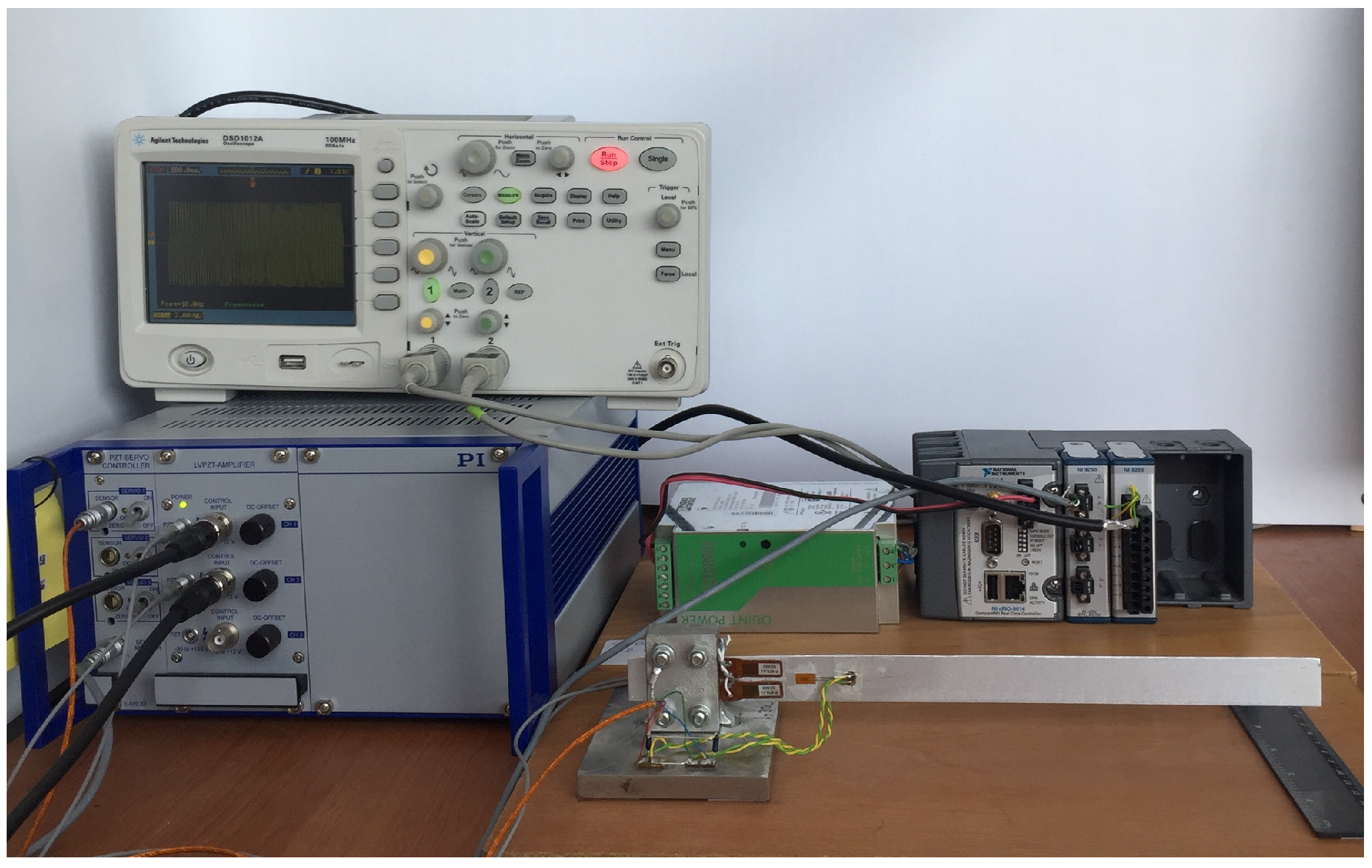
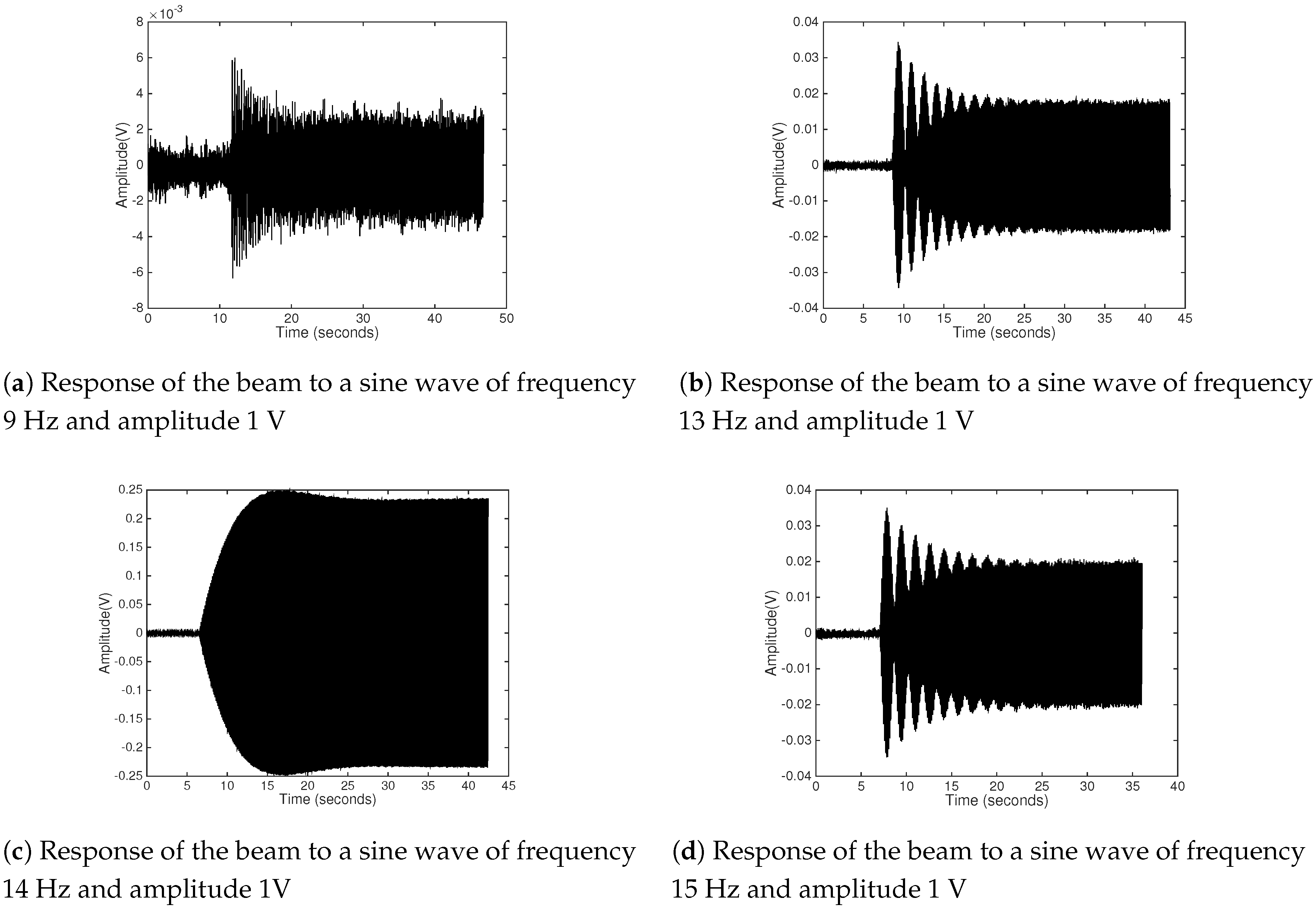
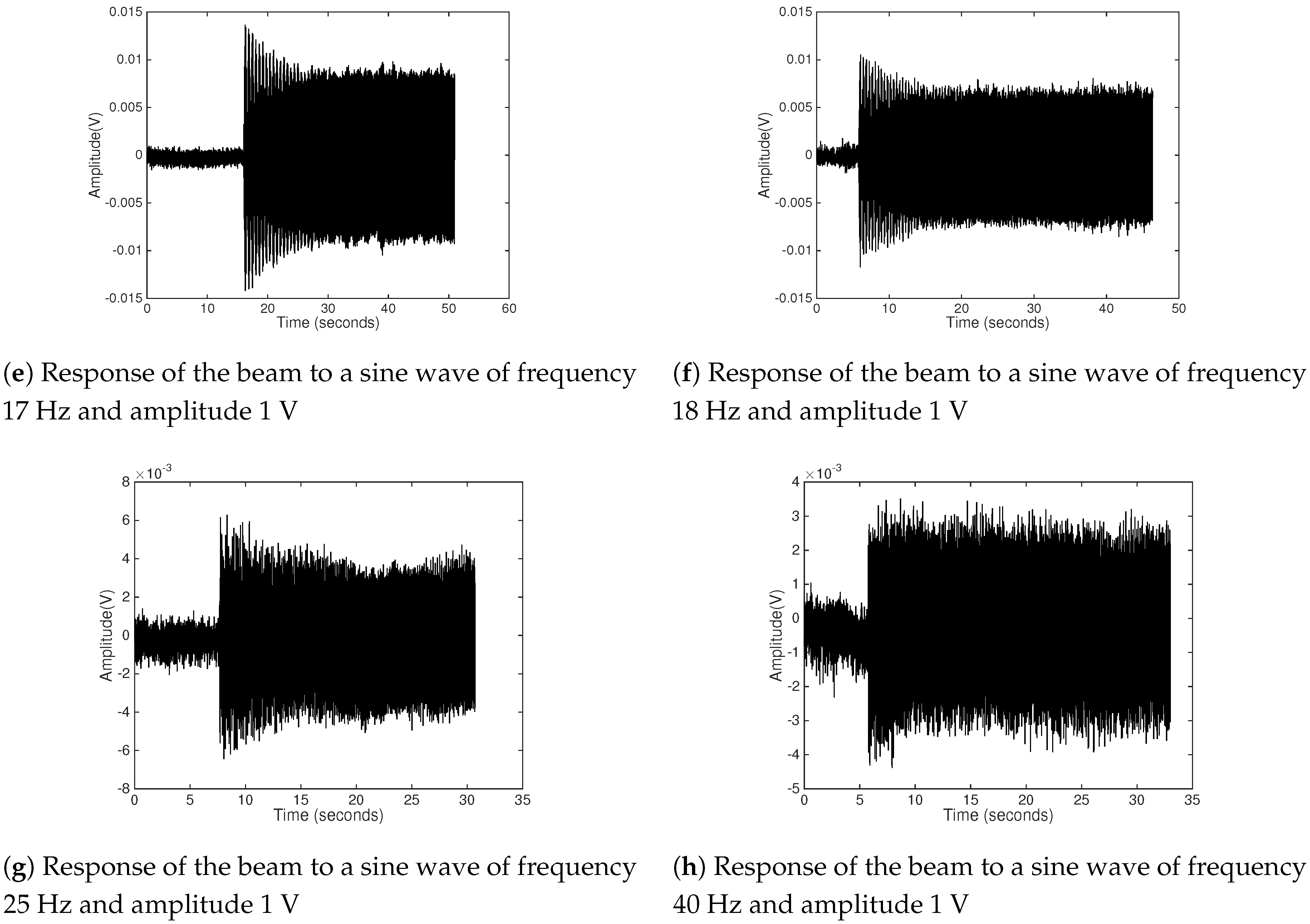
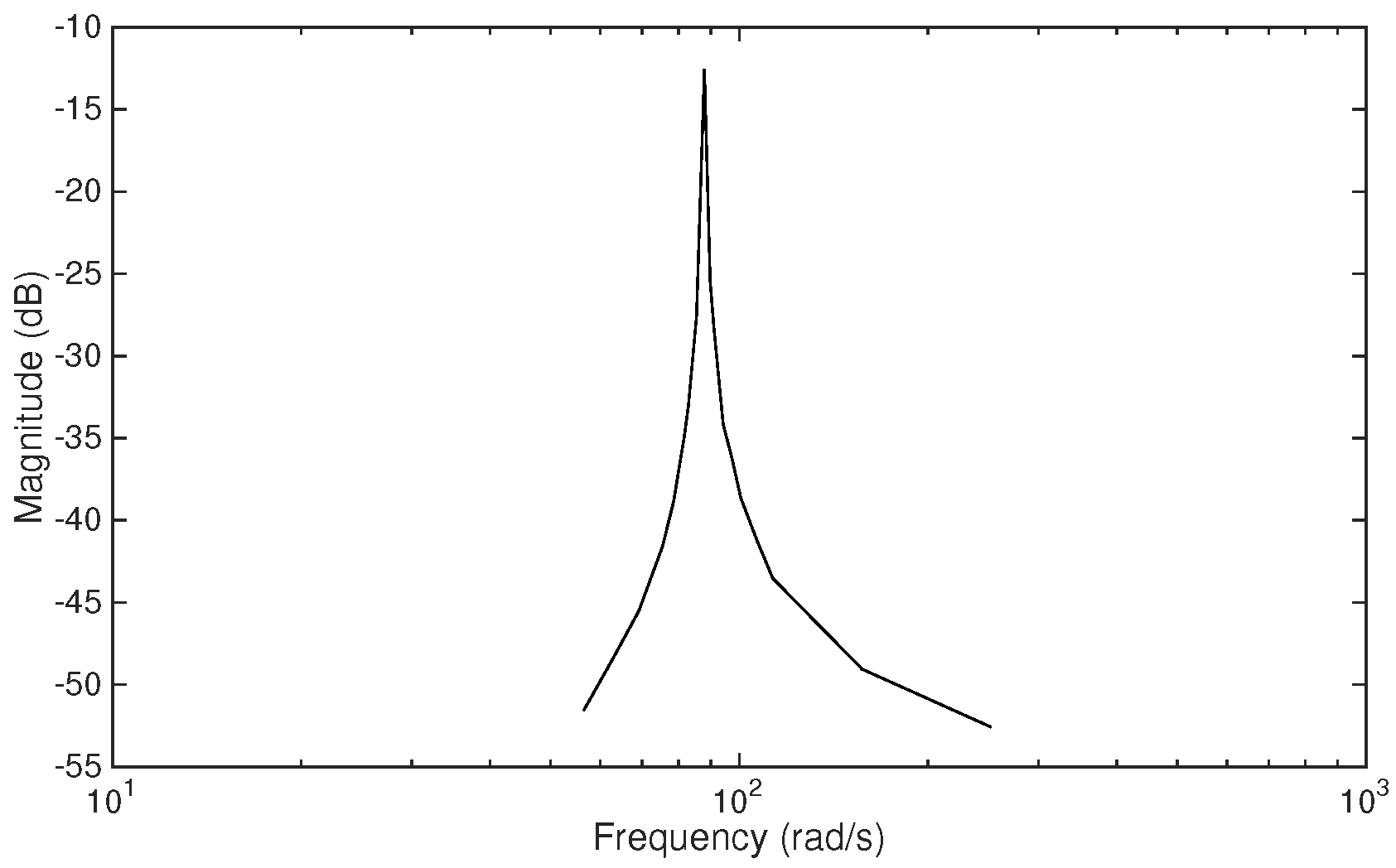
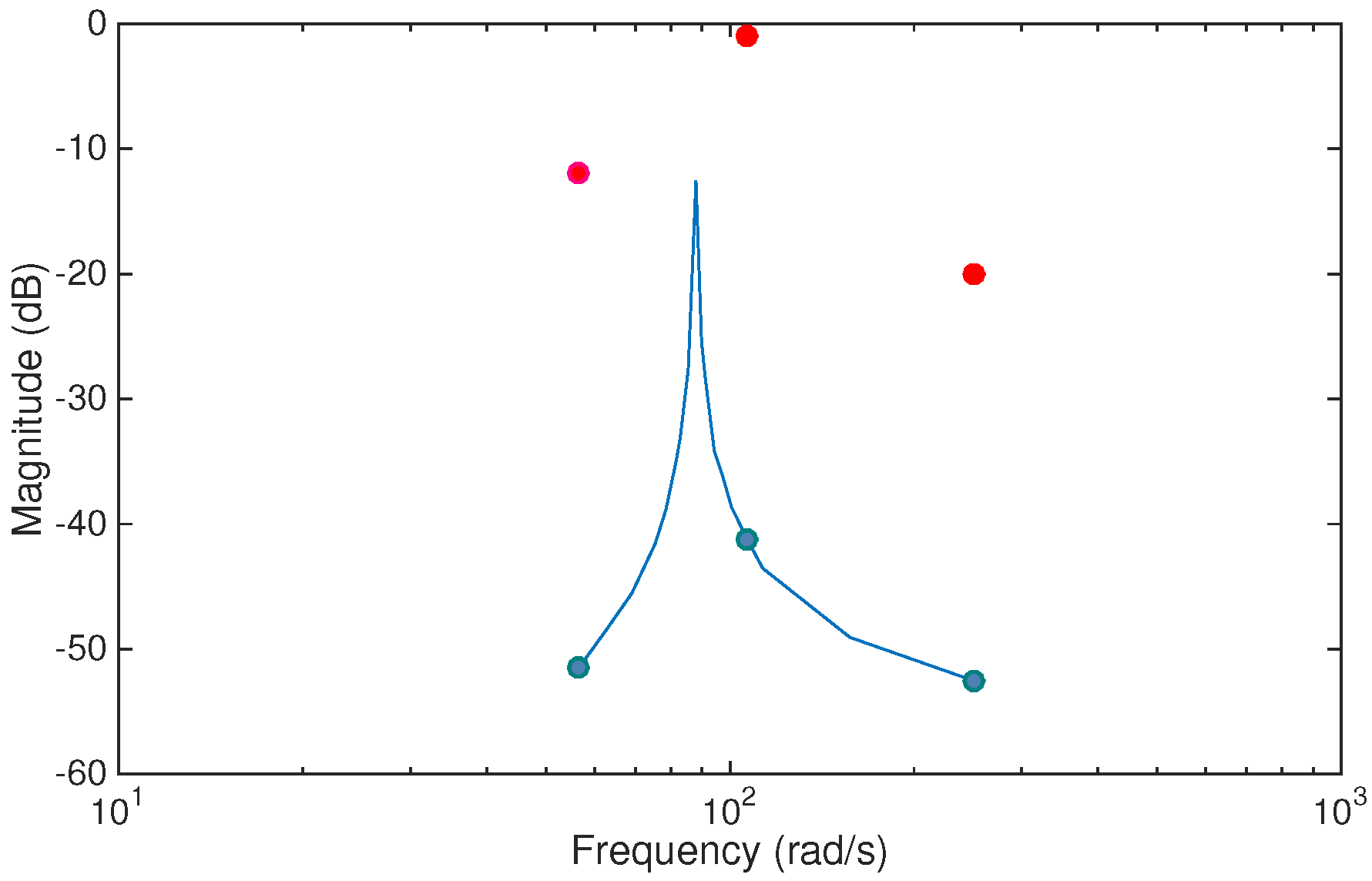
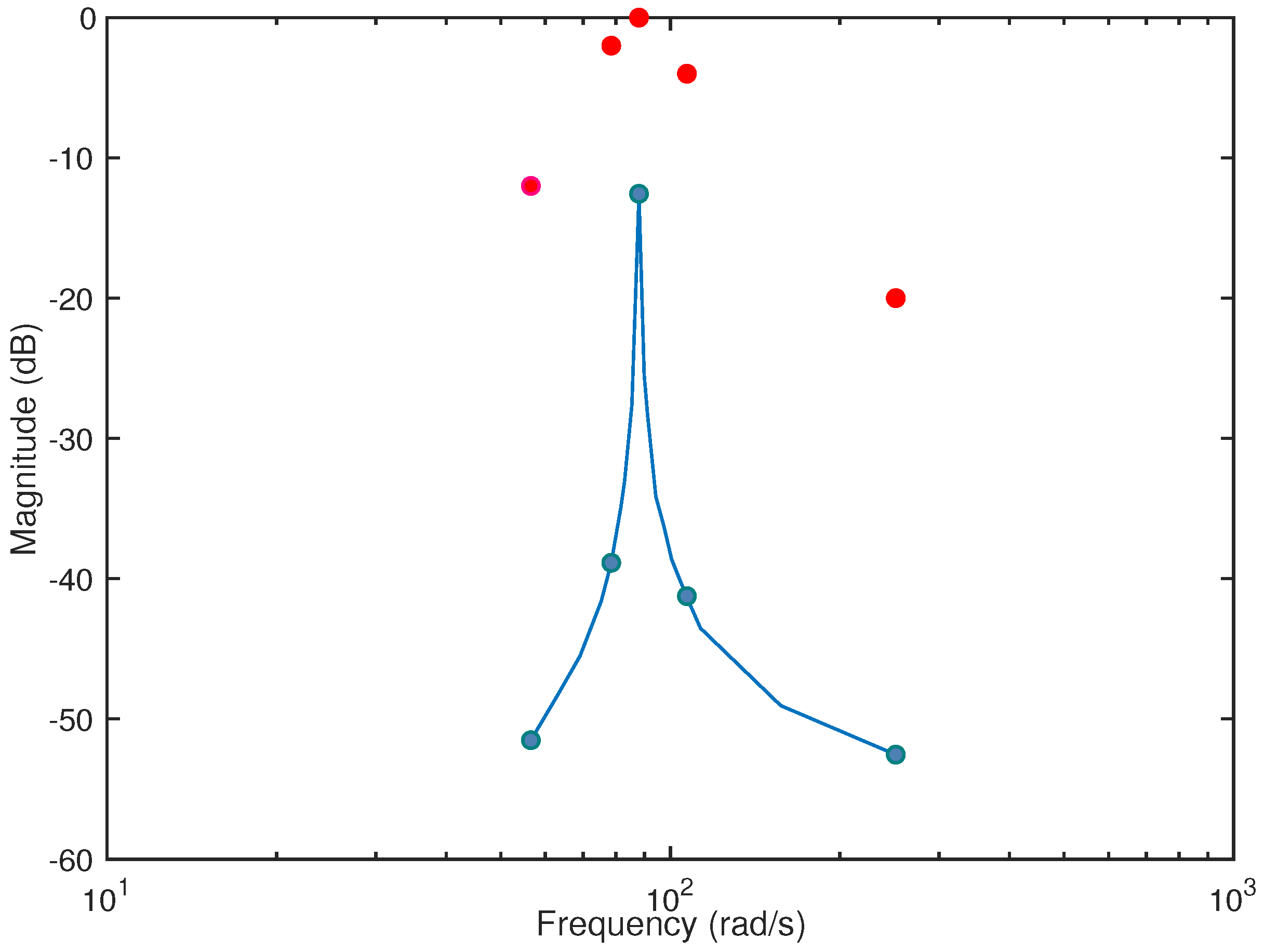
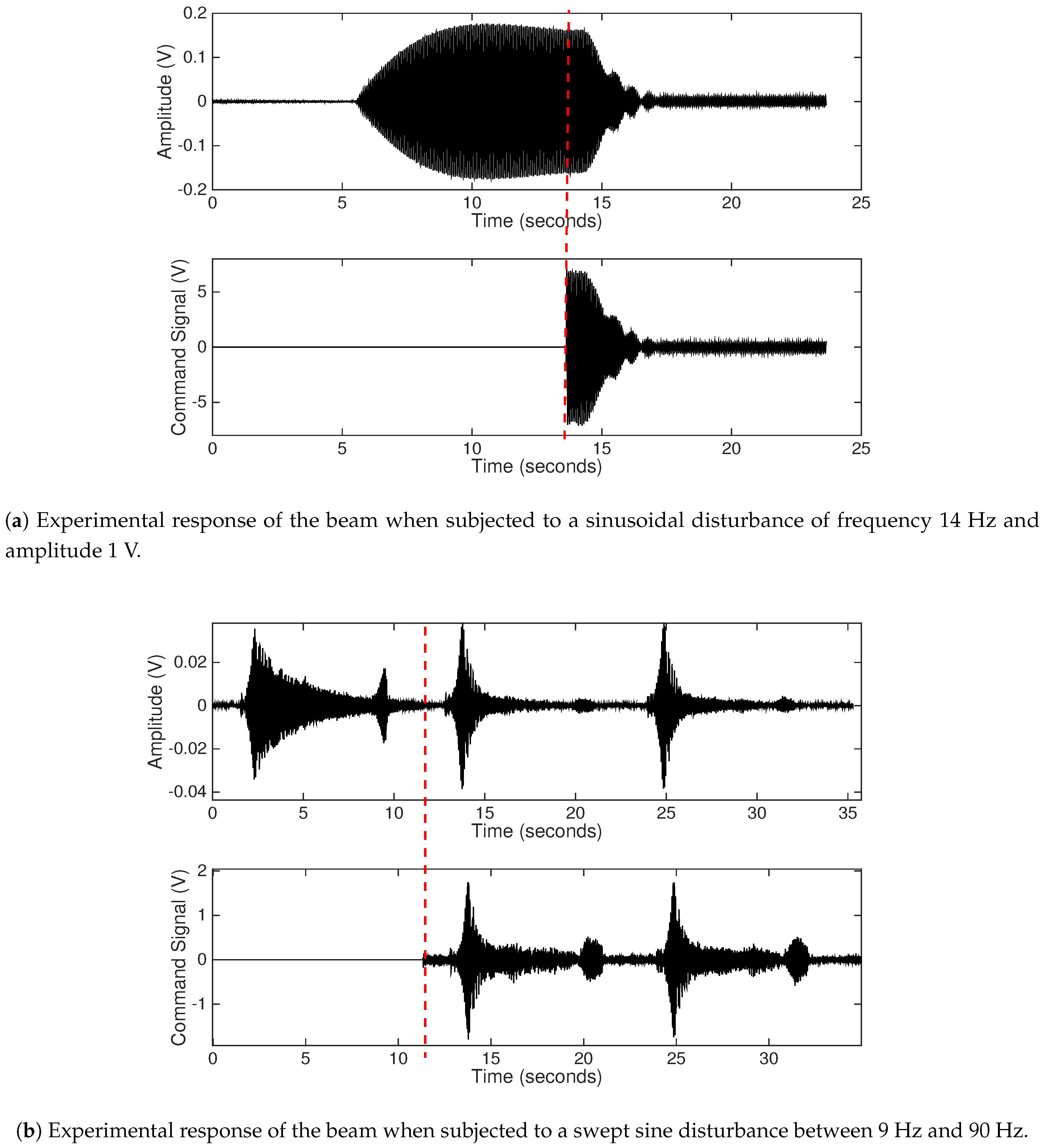
3. Experimental Platform
4. Controller Tuning
4.1. Optimization Guidelines
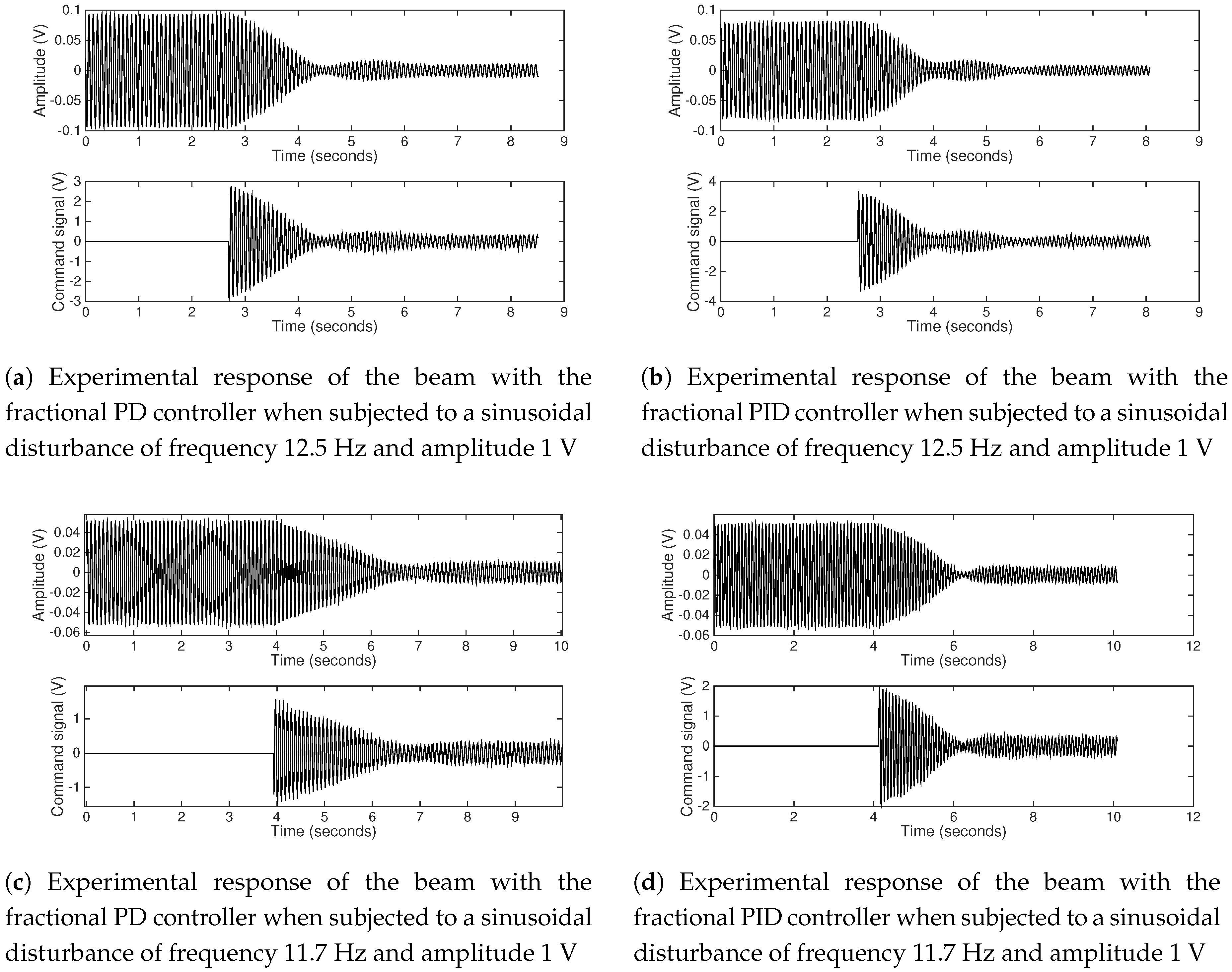
4.2. Fractional Order PI/PD Tuning
4.3. Fractional-Order PID Tuning
4.4. Robustness Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Aström, K.J.; Hägglund, T. PID Controllers: Theory, Design, and Tuning, 2nd ed.; Instrument Society of America: Research Triangle Park, NC, USA, 1995. [Google Scholar]
- de Souza, M.R.S.B.; Murofushi, R.H.; Tavares, J.P.Z.d.S.; Ribeiro, J. Comparison Among Experimental PID Auto Tuning Methods for a Self-balancing Robot. In Robotics: 12th Latin American Robotics Symposium and Third Brazilian Symposium on Robotics, LARS 2015/SBR 2015, Uberlândia, Brazil, 28 October–1 November 2015; Revised Selected Papers; Springer International Publishing: Cham, Switzerland, 2016; pp. 72–86. [Google Scholar] [CrossRef]
- Keyser, R.D.; Maxim, A.; Copot, C.; Ionescu, C.M. Validation of a multivariable relay-based PID autotuner with specified robustness. In Proceedings of the 2013 IEEE 18th Conference on Emerging Technologies Factory Automation (ETFA), Cagliari, Italy, 10–13 September 2013; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Nishikawa, Y.; Sannomiya, N.; Ohta, T.; Tanaka, H. A method for auto-tuning of PID control parameters. Automatica 1984, 20, 321–332. [Google Scholar] [CrossRef]
- Jahanshahi, E.; Sivalingam, S.; Schofield, J.B. Industrial test setup for autotuning of PID controllers in large-scale processes: Applied to Tennessee Eastman process. IFAC-PapersOnLine 2015, 48, 469–476. [Google Scholar] [CrossRef]
- Åström, K.; Hägglund, T. Revisiting the Ziegler–Nichols step response method for PID control. J. Process Control 2004, 14, 635–650. [Google Scholar] [CrossRef]
- Åström, K.J.; Hägglund, T. Automatic tuning of simple regulators with specifications on phase and amplitude margins. Automatica 1984, 20, 645–651. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Moore, K.L. Relay Feedback Tuning of Robust PID Controllers with Iso-damping Property. Trans. Syst. Man Cyber. Part B 2005, 35, 23–31. [Google Scholar] [CrossRef] [PubMed]
- Vilanova, R.; Visioli, A. PID Control in the Third Millennium: Lessons Learned and New Approaches; Springer: Berlin, Germany, 2012. [Google Scholar]
- Chen, Y.; Petras, I.; Xue, D. Fractional order control—A tutorial. In Proceedings of the 2009 American Control Conference, St. Louis, MO, USA, 10–12 June 2009; pp. 1397–1411. [Google Scholar] [CrossRef]
- Monje, C.A. Fractional-Order Systems and Controls: Fundamentals and Applications; Springer: London, UK, 2010. [Google Scholar]
- Muresan, C.I.; Birs, I.R.; Folea, S.; Dulf, E.H.; Prodan, O. Experimental results of a fractional order PDμ controller for vibration suppresion. In Proceedings of the 2016 14th International Conference on Control, Automation, Robotics and Vision (ICARCV), Phuket, Thailand, 13–15 November 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Birs, I.R.; Folea, S.; Copot, D.; Prodan, O.; Muresan, C.I. Comparative analysis and experimental results of advanced control strategies for vibration suppression in aircraft wings. In Proceedings of the 2016 13th European Workshop on advanced Control and Diagnosis, Lille, France, 17–18 November 2016. [Google Scholar]
- Birs, I.R.; Muresan, C.I.; Folea, S.; Prodan, O.; Kovacs, L. Vibration suppression with fractional-order PIλDμ controller. In Proceedings of the 2016 IEEE International Conference on Automation, Quality and Testing, Robotics (AQTR), Cluj-Napoca, Romania, 19–21 May 2016; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Birs, I.R.; Folea, S.; Muresan, C.I. An optimal fractional-order controller for vibration attenuation. In Proceedings of the 2017 25th Mediterranean Conference on Control and Automation (MED), Valletta, Malta, 3–6 July 2017; pp. 828–832. [Google Scholar] [CrossRef]
- Oustaloup, A.; Mathieu, B.; Lanusse, P. The CRONE Control of Resonant Plants: Application to a Flexible Transmission. Eur. J. Control 1995, 1, 113–121. [Google Scholar] [CrossRef]
- Tseng, H.E.; Hrovat, D. State of the art survey: Active and semi-active suspension control. Veh. Syst. Dyn. 2015, 53, 1034–1062. [Google Scholar] [CrossRef]
- Calderón, A.J.; Vinagre, B.M.; Feliu, V. Fractional order control strategies for power electronic buck converters. Signal Process. 2006, 86, 2803–2819. [Google Scholar] [CrossRef]
- Maddahi, A.; Sepehri, N.; Kinsner, W. Fractional-Order Control of Hydraulically Powered Actuators: Controller Design and Experimental Validation. IEEE/ASME Trans. Mechatron. 2019, 24, 796–807. [Google Scholar] [CrossRef]
- Feliu-Batlle, V.; Rivas-Perez, R.; Castillo-Garcia, F.J.; Sanchez-Rodriguez, L.; Linarez-Saez, A. Robust fractional-order controller for irrigation main canal pools with time-varying dynamical parameters. Comput. Electron. Agric. 2011, 76, 205–217. [Google Scholar] [CrossRef]
- Al-Dhaifallah, M.; Kanagaraj, N.; Nisar, K.S. Fuzzy Fractional-Order PID Controller for Fractional Model of Pneumatic Pressure System. Math. Probl. Eng. 2018, 2018. [Google Scholar] [CrossRef] [Green Version]
- Abdelbaky, M.; El-Hawwary, M.; Emara, H. Implementation of fractional-order PID controller in an industrial distributed control system. In Proceedings of the 2017 14th International Multi-Conference on Systems, Signals & Devices (SSD), Marrakech, Morocco, 28–31 March 2017; pp. 713–718. [Google Scholar] [CrossRef]
- Sharma, R.; Rana, K.P.; Kumar, V. Performance analysis of fractional order fuzzy PID controllers applied to a robotic manipulator. Expert Syst. Appl. 2014, 41, 4274–4289. [Google Scholar] [CrossRef]
- Monje, C.A.; Vinagre, B.M.; Feliu, V.; Chen, Y. On auto-tuning of fractional order PIλDμ controllers. IFAC Proc. Vol. 2006, 39, 34–39. [Google Scholar] [CrossRef]
- Monje, C.; Vinagre, B.; Calderón, A.; Feliu, V.; Chen, Y. Auto-tuning of fractional lead-lag compensators. IFAC Proc. Vol. 2005, 38, 319–324. [Google Scholar] [CrossRef]
- Alagoz, B.B.; Ates, A.; Yeroglu, C. Auto-tuning of PID controller according to fractional-order reference model approximation for DC rotor control. Mechatronics 2013, 23, 789–797. [Google Scholar] [CrossRef]
- Jin, C.Y.; Ryu, K.H.; Sung, S.W.; Lee, J.; Lee, I.B. PID auto-tuning using new model reduction method and explicit PID tuning rule for a fractional order plus time delay model. J. Process Control 2014, 24, 113–128. [Google Scholar] [CrossRef]
- Muresan, C.; Keyser, R.D.; Birs, I.; Folea, S.; Prodan, O. An Autotuning Method for a Fractional Order PD Controller for Vibration Suppression. In Proceedings of the 2017 International Workshop Mathematical Methods in Engineering (MME 2017), Ankara, Turkey, 27–29 April 2017. [Google Scholar]
- Keyser, R.D.; Muresan, C.I.; Ionescu, C.M. A novel auto-tuning method for fractional order PI/PD controllers. ISA Trans. 2016, 62, 268–275. [Google Scholar] [CrossRef]
- Gude, J.J.; Kahoraho, E. Modified Ziegler-Nichols method for fractional PI controllers. In Proceedings of the 2010 IEEE 15th Conference on Emerging Technologies Factory Automation (ETFA 2010), Bilbao, Spain, 13–16 September 2010; pp. 1–5. [Google Scholar] [CrossRef]
- Monje, C.A.; Vinagre, B.M.; Feliu, V.; Chen, Y. Tuning and auto-tuning of fractional-order controllers for industry applications. Control Eng. Pract. 2008, 16, 798–812. [Google Scholar] [CrossRef] [Green Version]
- Li, W.; Hori, Y. Vibration suppression using single neuron-based PI fuzzy controller and fractional-order disturbance observer. IEEE Trans. Ind. Electron. 2007, 54, 117–126. [Google Scholar] [CrossRef]
- Onat, C.; Şahin, M.; Yaman, Y. Fractional controller design for suppressing smart beam vibrations. Aircr. Eng. Aerosp. Technol. 2012. [Google Scholar] [CrossRef]
- Muresan, C.I.; Folea, S.; Birs, I.R.; Ionescu, C. A novel fractional-order model and controller for vibration suppression in flexible smart beam. Nonlinear Dyn. 2018, 93, 525–541. [Google Scholar] [CrossRef]
- Birs, I.R.; Muresan, C.I.; Folea, S.; Prodan, O. A Comparison between Integer and Fractional Order PDμ Controllers for Vibration Suppression. Appl. Math. Nonlinear Sci. 2016, 1, 273–282. [Google Scholar] [CrossRef] [Green Version]
- Aghababa, M.P. A fractional-order controller for vibration suppression of uncertain structures. ISA Trans. 2013, 52, 881–887. [Google Scholar] [CrossRef] [PubMed]
- Lu, J.; Xie, W.; Zhou, H.; Zhang, A. Vibration suppression using fractional-order disturbance observer based adaptive grey predictive controller. J. Vibroeng. 2014, 16, 2205–2215. [Google Scholar]
- Zhao, H.; Deng, W.; Yang, X.; Li, X.; Dong, C. An optimized fractional order PID controller for suppressing vibration of AC motor. J. Vibroeng. 2016, 18, 2205–2220. [Google Scholar] [CrossRef]
- De Keyser, R.; Muresan, C.I.; Ionescu, C.M. An efficient algorithm for low-order direct discrete-time implementation of fractional order transfer functions. ISA Trans. 2018, 74, 229–238. [Google Scholar] [CrossRef] [PubMed]












© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Birs, I.; Folea, S.; Prodan, O.; Dulf, E.; Muresan, C. An Experimental Tuning Approach of Fractional Order Controllers in the Frequency Domain. Appl. Sci. 2020, 10, 2379. https://doi.org/10.3390/app10072379
Birs I, Folea S, Prodan O, Dulf E, Muresan C. An Experimental Tuning Approach of Fractional Order Controllers in the Frequency Domain. Applied Sciences. 2020; 10(7):2379. https://doi.org/10.3390/app10072379
Chicago/Turabian StyleBirs, Isabela, Silviu Folea, Ovidiu Prodan, Eva Dulf, and Cristina Muresan. 2020. "An Experimental Tuning Approach of Fractional Order Controllers in the Frequency Domain" Applied Sciences 10, no. 7: 2379. https://doi.org/10.3390/app10072379
APA StyleBirs, I., Folea, S., Prodan, O., Dulf, E., & Muresan, C. (2020). An Experimental Tuning Approach of Fractional Order Controllers in the Frequency Domain. Applied Sciences, 10(7), 2379. https://doi.org/10.3390/app10072379