A Hip Active Assisted Exoskeleton That Assists the Semi-Squat Lifting

Abstract
:1. Introduction
1.1. Research on Manual Handling Posture
1.2. Back-Support Exoskeleton
- In Section 2, by establishing the inverse dynamic model of adult male semi-squatting and combining the average height and weight distribution of an adult male body [24], the output torque and power of the hip joint were analyzed. Meanwhile, we designed the mechanical structure of the hip-assisted exoskeleton, we also designed a control strategy based on the joint power of a semi-squat.
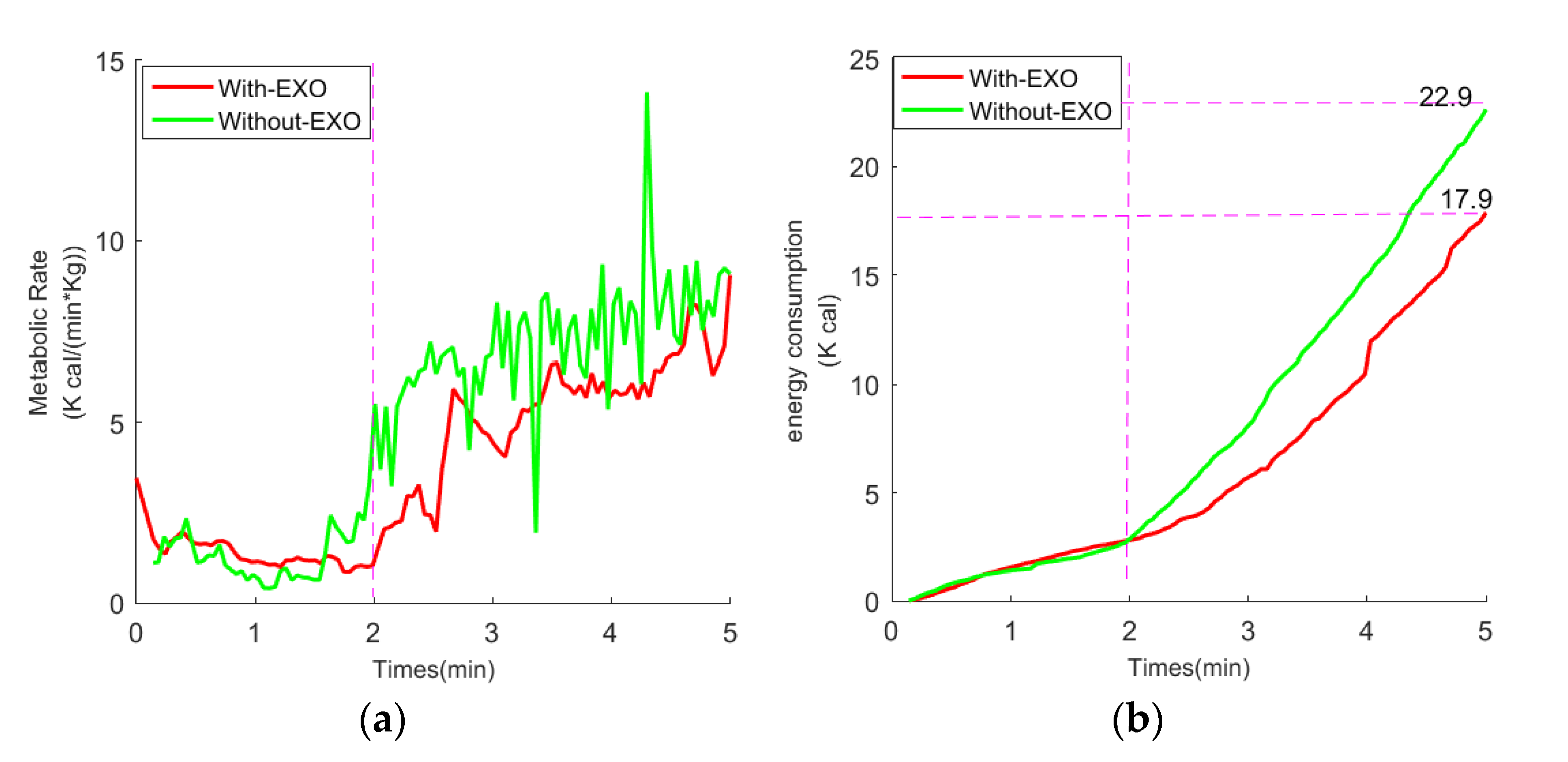
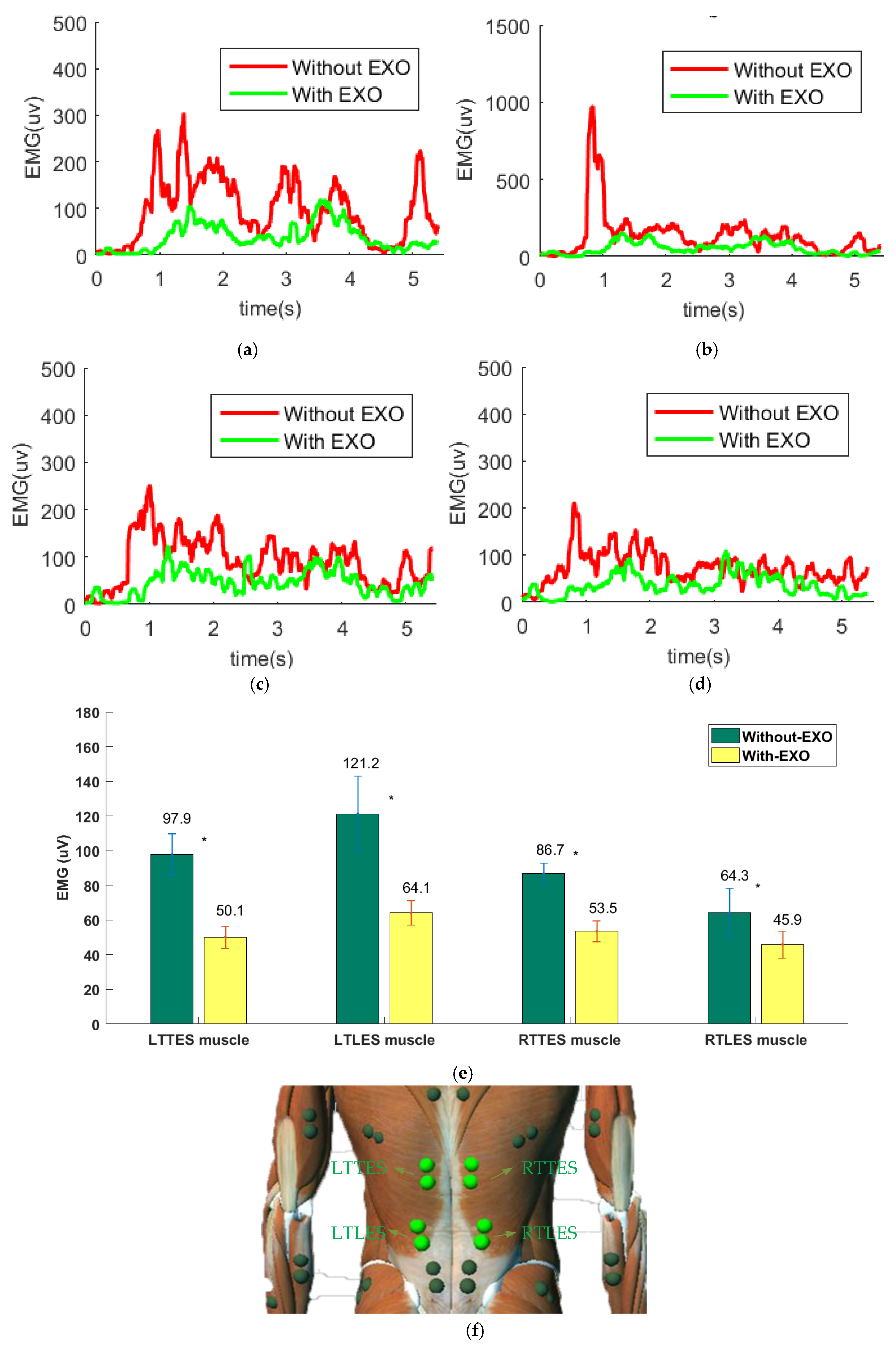
- In Section 3, we measured the metabolism cost of the subjects with and without the active exoskeleton under the condition of using semi-squat for continuous lifting of certain weights. In addition, the surface EMG activities of muscle groups in L5/S1 location were also recorded with and without the active exoskeleton.
- Lastly, we analyzed the experimental data and concluded the paper.
2. Materials and Methods
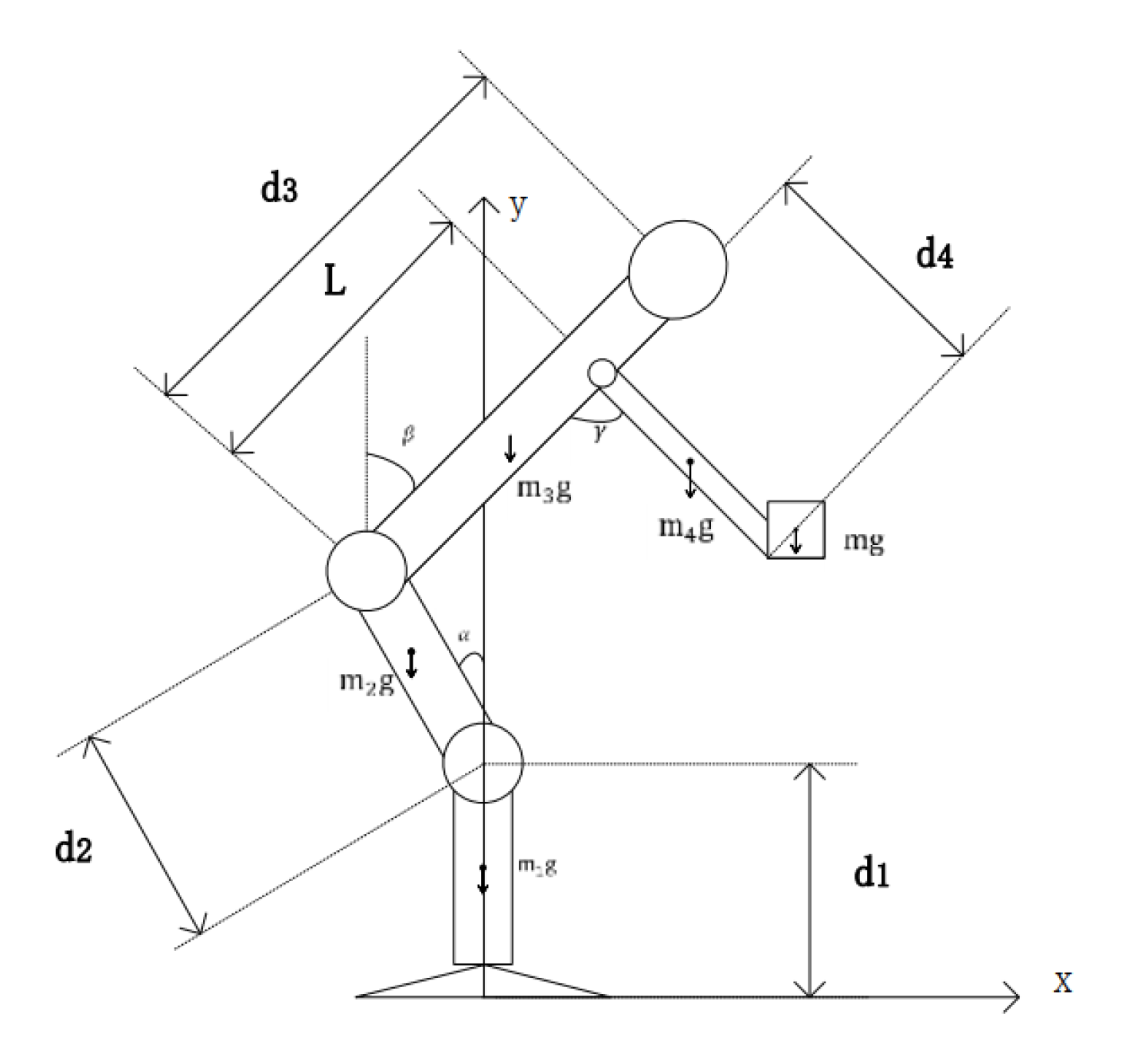
2.1. Semi-Squat Lifting Model
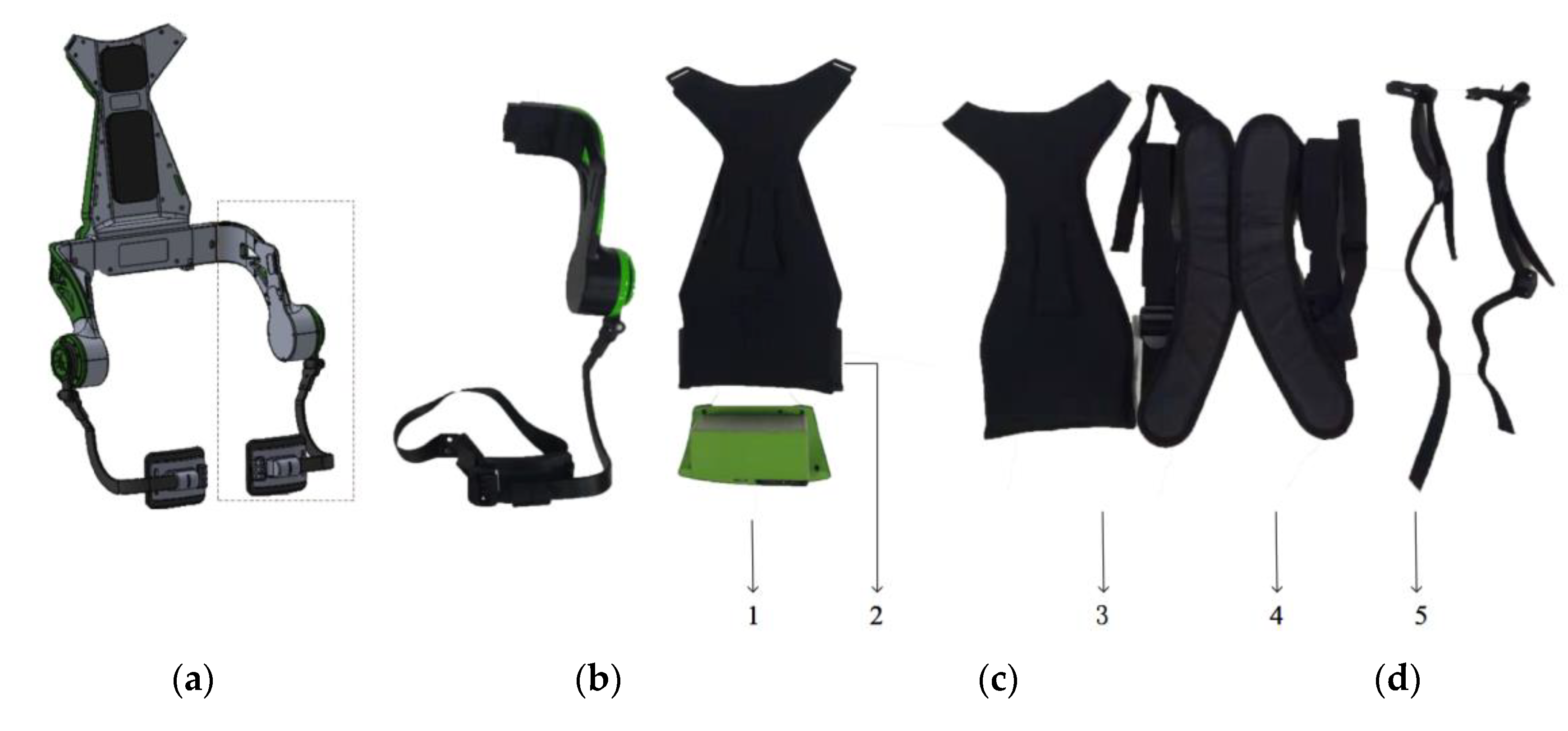
2.2. Structure Design
2.2.1. Mechanical Structure Design
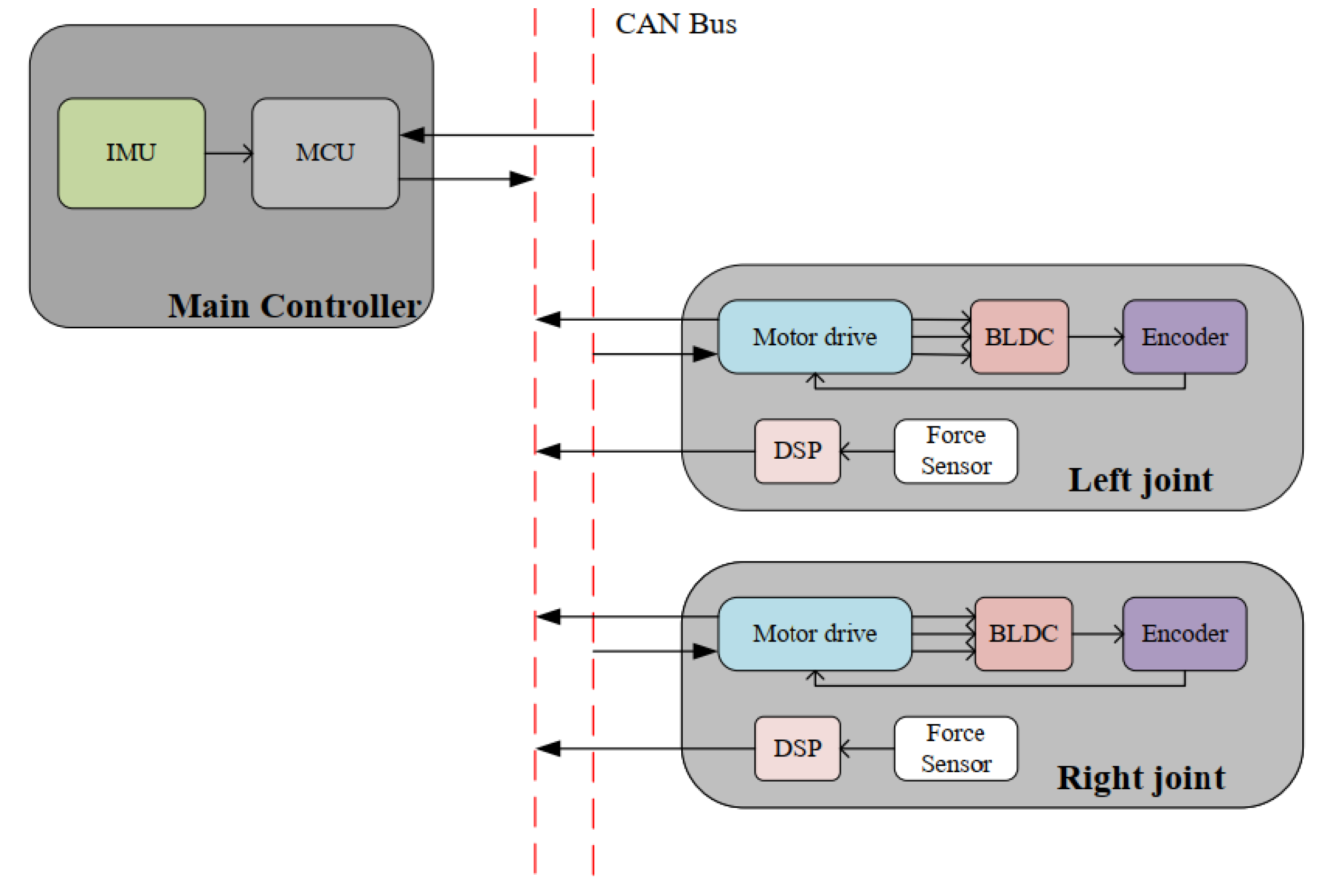
2.2.2. Electrical Structure Design
- Absolute position magnetic encoders (AS5600) measure the joint angle at each joint output shaft.
- One IMU (Inertia Measurement Unit) (MPU6050) placed in the back-support plate to estimate the pitch angle of the upper body of the wearer.
- A force sensor at each powered joint is used to measure the interaction force between the body and the exoskeleton joint.
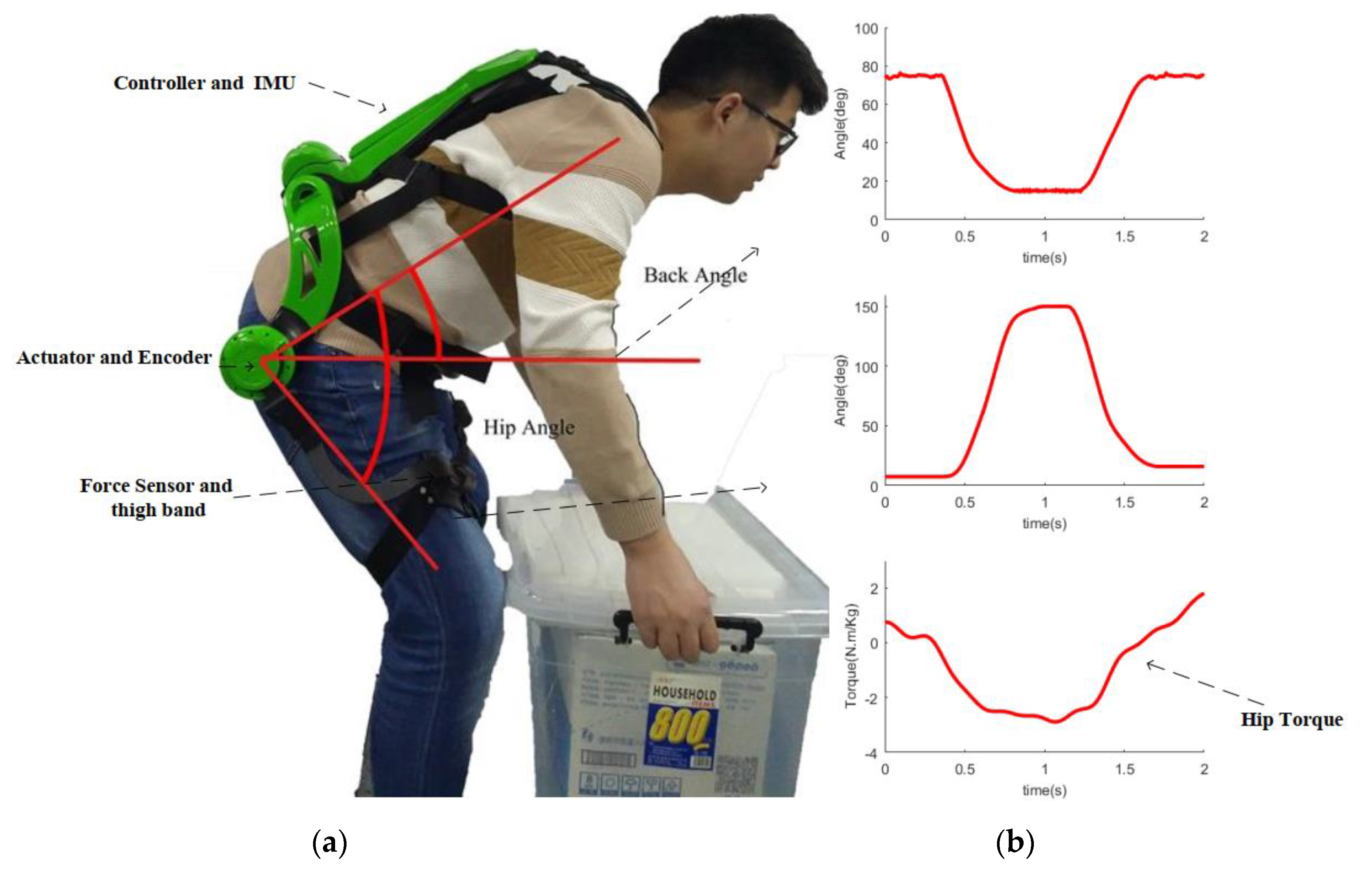
2.3. Controller Design
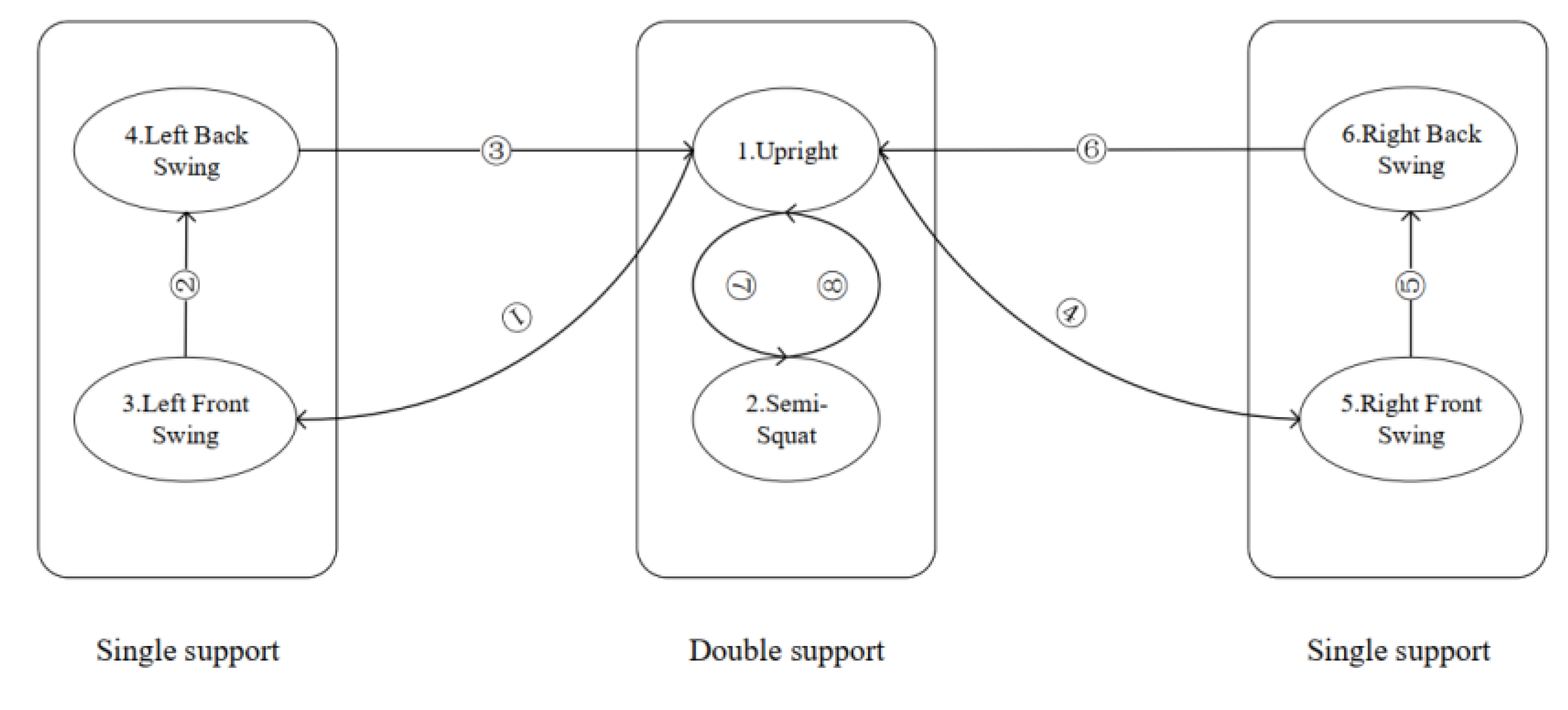
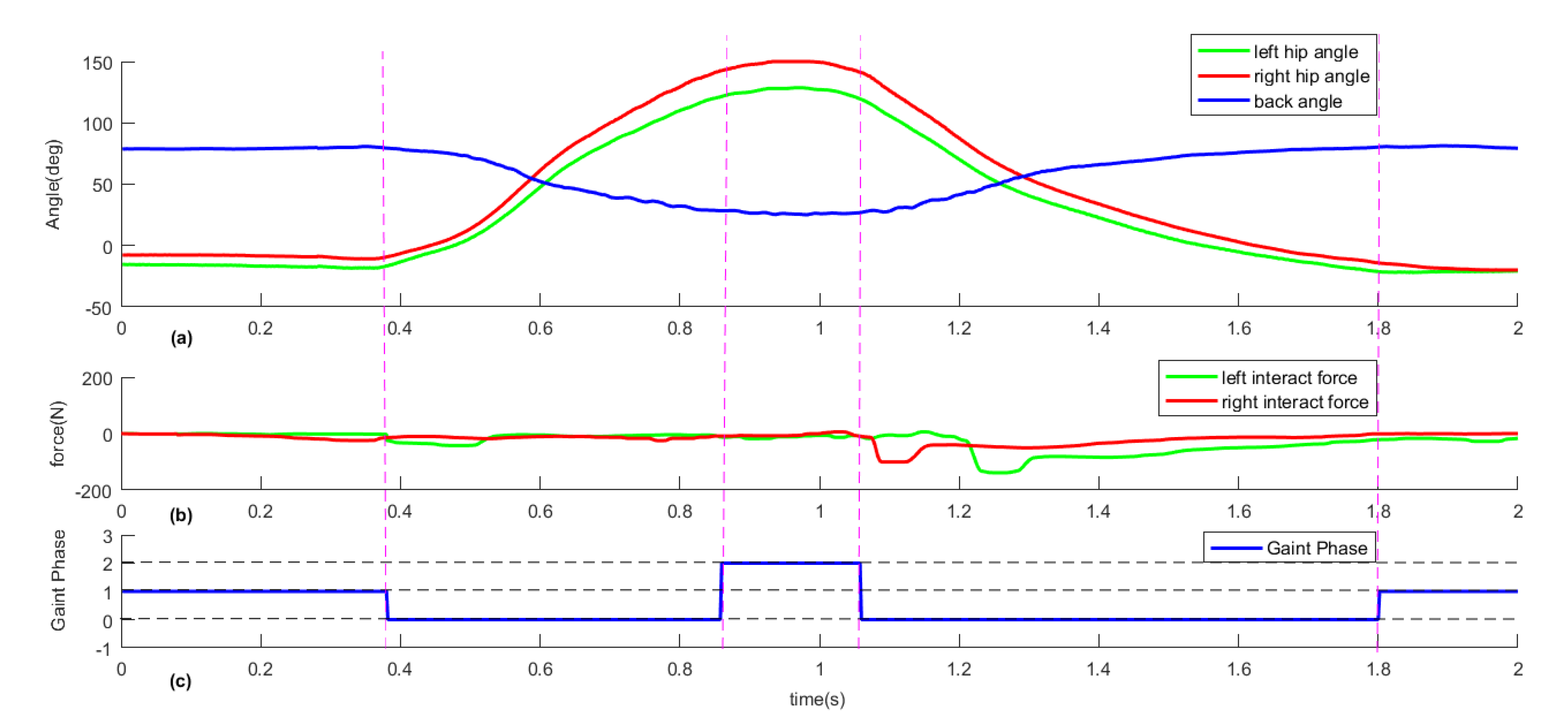
2.3.1. Finite-State Machine
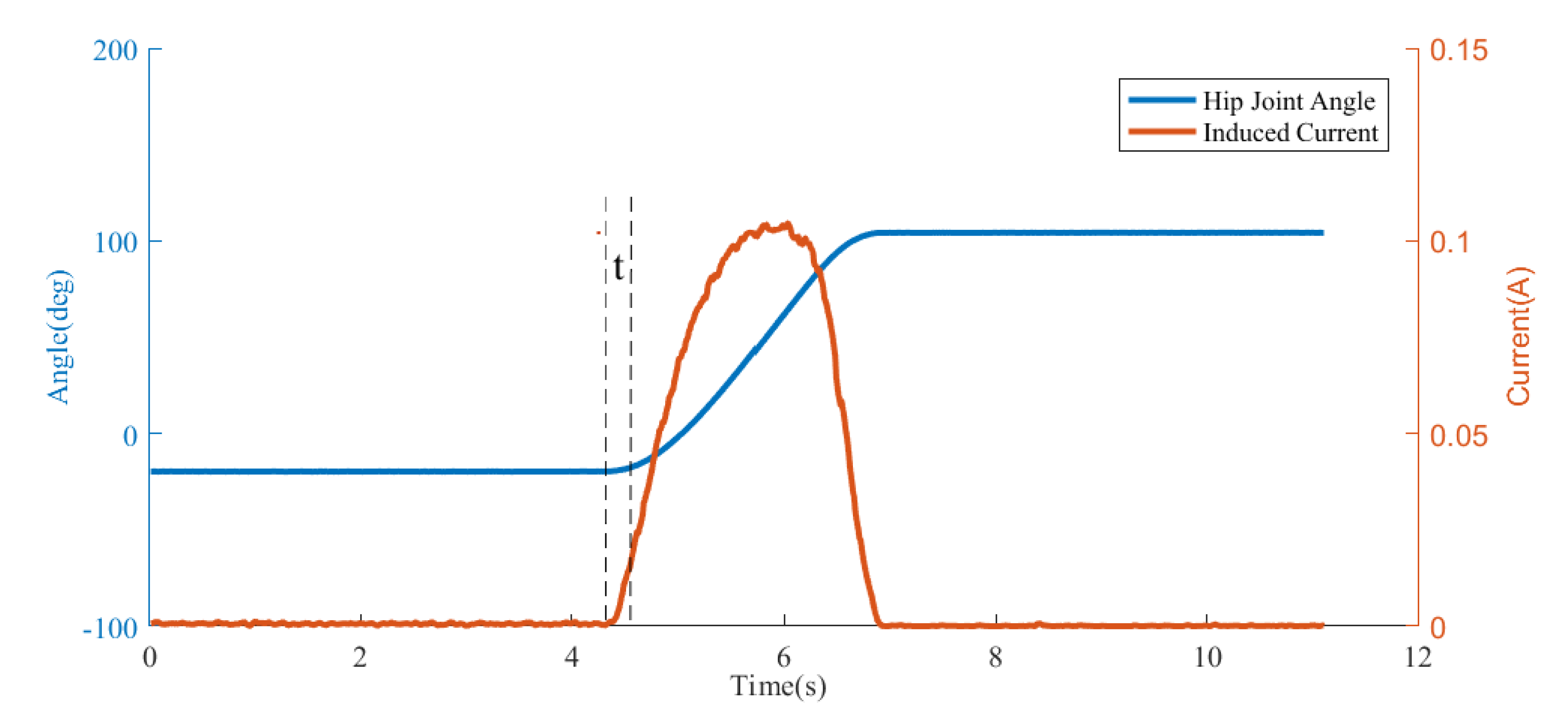
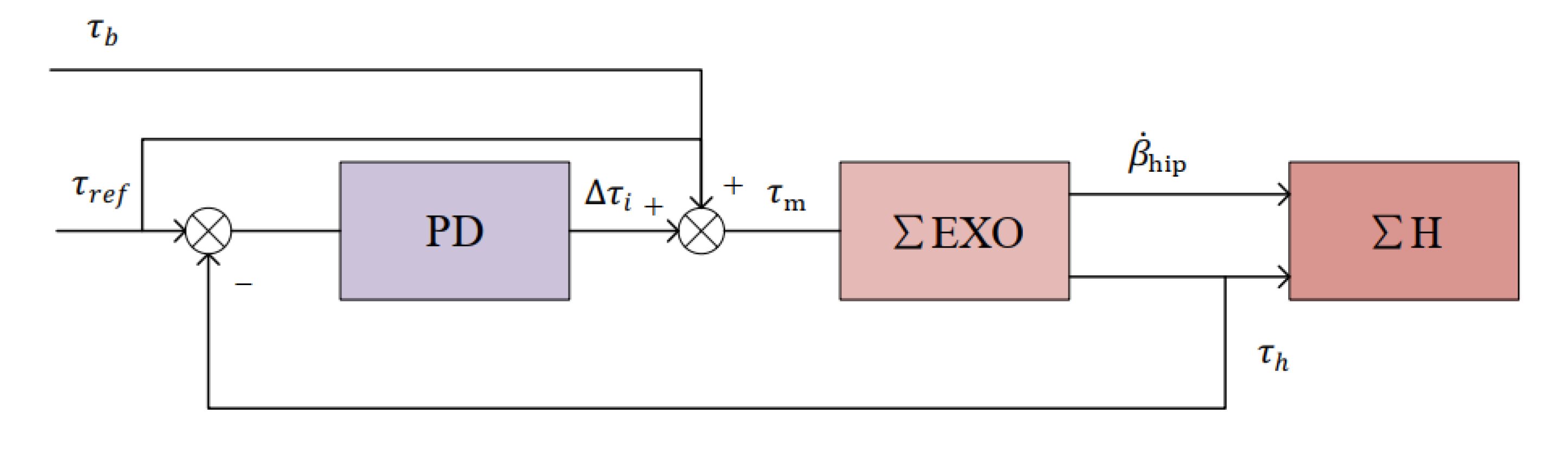
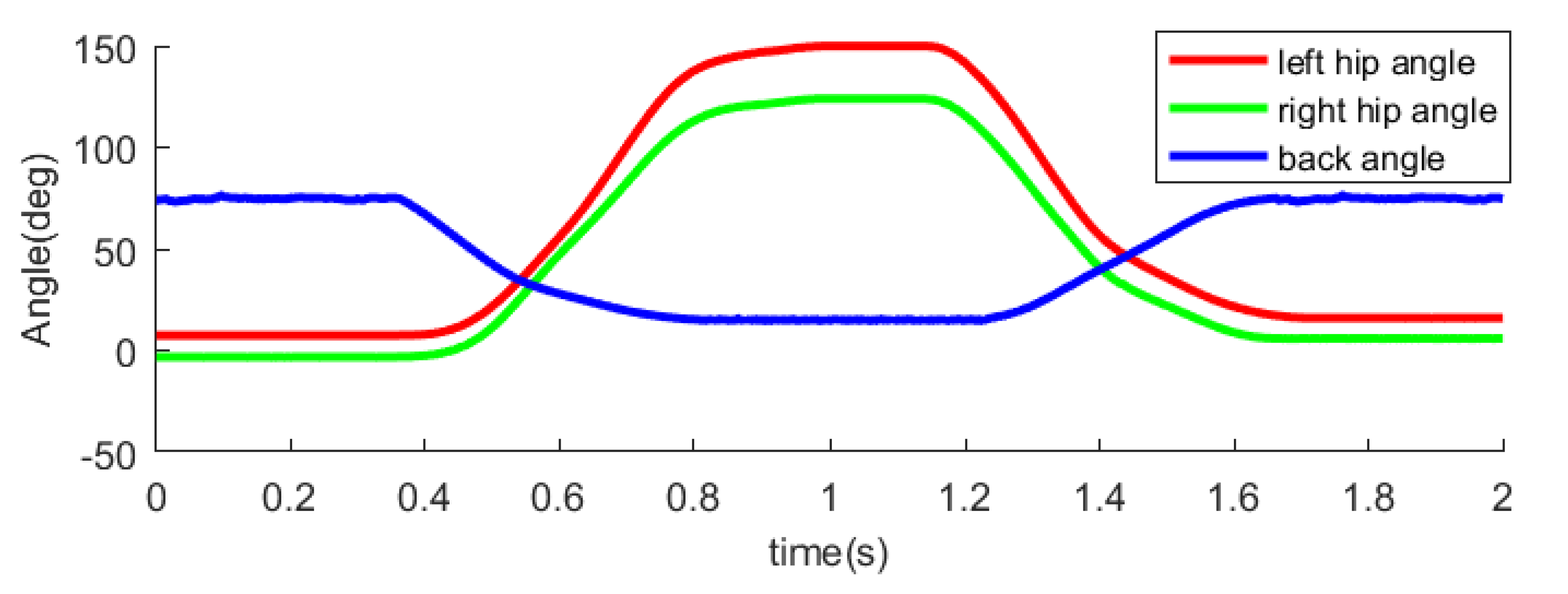
2.3.2. Follow Control Strategy
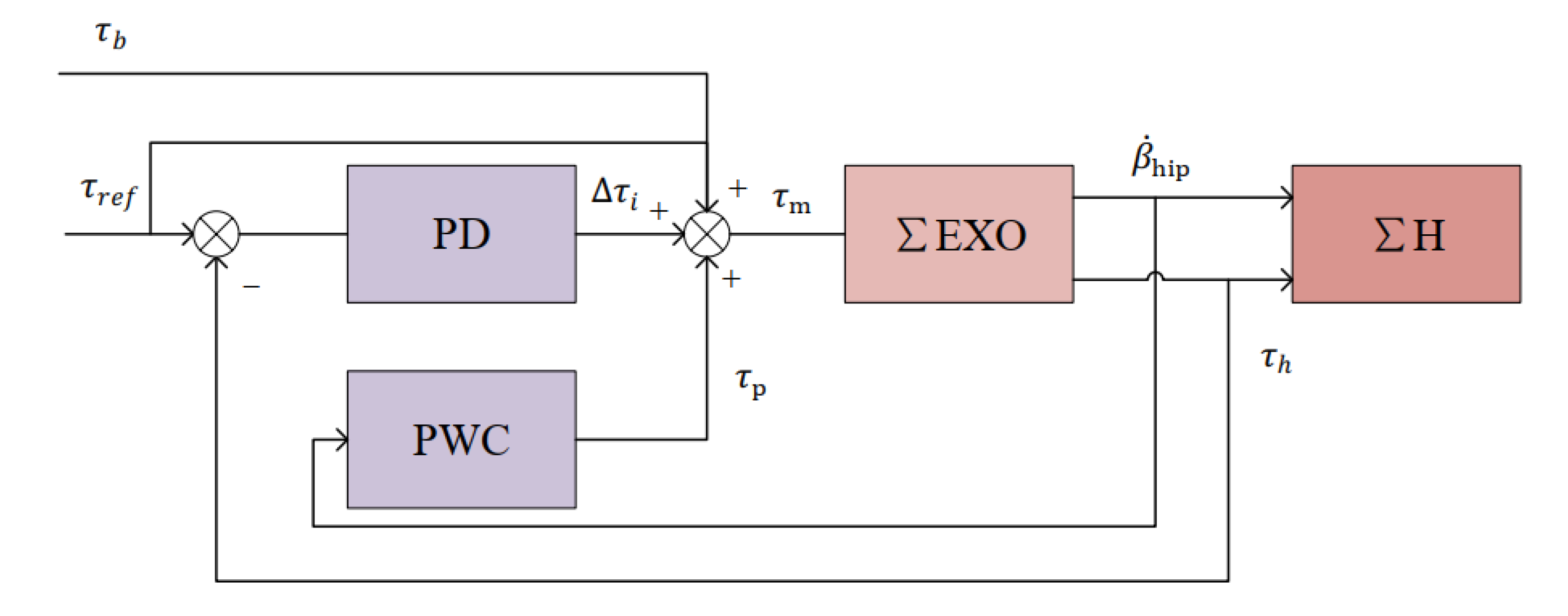
2.3.3. Assist Control Strategy
3. Evaluation Methods
3.1. Measure Metabolism Cost of Energy
3.2. Measure Back Muscle Electromyography Signal
4. Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hoy, D.; Brooks, P.; Blyth, F.; Buchbinder, R. The Epidemiology of low back pain. Best Pract. Res. Clin. Rheumatol. 2010, 24, 769–781. [Google Scholar] [CrossRef]
- Griffith, L.E.; Shannon, H.S.; Wells, R.P.; Walter, S.D.; Cole, D.C.; Côté, P.; Frank, J.; Hogg-Johnson, S.; Langlois, L.E. Individual Participant Data Meta-Analysis of Mechanical Workplace Risk Factors and Low Back Pain. Am. J. Public Health 2012, 102, 309–318. [Google Scholar] [CrossRef]
- Munch Nielsen, C.; Gupta, N.; Knudsen, L.E.; Holtermann, A. Association of objectively measured occupational walking and standing still with low back pain: A cross-sectional study. Ergonomics 2016, 60, 118–126. [Google Scholar] [CrossRef]
- Breivik, H.; Collett, B.; Ventafridda, V.; Cohen, R.; Gallacher, D. Survey of chronic pain in Europe: Prevalence, impact on daily life, and treatment. Eur. J. Pain 2006, 10, 287. [Google Scholar] [CrossRef]
- Langley, P.C. The prevalence, correlates and treatment of pain in the European Union. Curr. Med Res. Opin. 2011, 27, 463–480. [Google Scholar] [CrossRef]
- Dagenais, S.; Caro, J.; Haldeman, S. A systematic review of low back pain cost of illness studies in the United States and internationally. Spine J. 2008, 8, 8–20. [Google Scholar] [CrossRef]
- Wang, Z. Experimental Study on Manual Lifting Techniques and Fatigue Recovery. Ph.D. Thesis, Huazhong University of Science and Technology, Wuhan, China, 2009. [Google Scholar]
- Burgess-Limerick, R.; Abernethy, B. Toward a Quantitative Definition of Manual Lifting Postures. Hum. Factors J. Hum. Factors Ergon. Soc. 1997, 39, 141–148. [Google Scholar] [CrossRef]
- Jing, C.; Lei, Y.; Jiasun, D.; Zhenglun, W. The Application of Surface Electromyography in Assessing Ergonomic Risk Factors Associated with Manual Lifting Tasks. J. Huazhong Univ. Sci. Technol. Med Sci. 2004, 24, 552–555. [Google Scholar] [CrossRef]
- Straker, L.; Duncan, P. Psychophysical and psychological comparison of squat and stoop lifting by young females. Aust. J. Physiother. 2000, 46, 27–32. [Google Scholar] [CrossRef]
- Bosch, T.; van Eck, J.; Knitel, K.; de Looze, M. The effects of a passive exoskeleton on muscle activity, discomfort and endurance time in forward bending work. Appl. Ergon. 2016, 54, 212–217. [Google Scholar] [CrossRef]
- Ito, T.; Ayusawa, K.; Yoshida, E.; Kobayashi, H. Stationary torque replacement for evaluation of active assistive devices using humanoid. In Proceedings of the 2016 IEEE-RAS 16th International Conference on Humanoid Robots (Humanoids) (IEEE), Cancun, Mexico, 15–17 November 2016. [Google Scholar] [CrossRef]
- Wei, W.; Wang, W.; Qu, Z.; Gu, J.; Lin, X.; Yue, C. The effects of a passive exoskeleton on muscle activity and metabolic cost of energy. Adv. Robot. 2020, 34, 1–9. [Google Scholar] [CrossRef]
- Abdoli-E, M.; Agnew, M.J.; Stevenson, J.M. An on-body personal lift augmentation device (plad) reduces emg amplitude of erector spinae during lifting tasks. Clin. Biomech. 2006, 21, 456–465. [Google Scholar] [CrossRef]
- Wehner, M.; Rempel, D.; Kazerooni, H. Lower Extremity Exoskeleton Reduces Back Forces in Lifting. In Asme Dynamic Systems & Control Conference; ASME: New York, NY, USA, 2009. [Google Scholar] [CrossRef]
- Ulrey, B.L.; Fathallah, F.A. Subject-specific, whole-body models of the stooped posture with a personal weight transfer device. J. Electromyogr. Kinesiol. 2003, 23, 206–215. [Google Scholar] [CrossRef]
- De Rijcke, L.; Näf, M.; Rodriguez-Guerrero, C.; Graimann, B.; Houdijk, H.; van Dieën, J.; Mombaur, K.; Russold, M.; Sarabon, N.; Babič, J.; et al. Spexor: Towards a passive spinal exoskeleton. In Wearable Robotics: Challenges and Trends; Springer: Cham, Switzerland, 2007. [Google Scholar] [CrossRef]
- Naf, M.B.; Rijcke, L.D.; Rodriguez-Guerrero, C.; Millard, M.; Lefeber, D. Towards low back support with a passive biomimetic exo-spine. In Proceedings of the IEEE International Conference on Rehabilitation Robotics, London, UK, 17–20 July 2007. [Google Scholar] [CrossRef]
- Nasiri, R.; Ahmadi, A.; Ahmadabadi, M.N. Reducing the Energy Cost of Human Running Using an Unpowered Exoskeleton. IEEE Trans. Neural Syst. Rehabil. Eng. 2018, 10, 2026–2032. [Google Scholar] [CrossRef]
- Wesslén, J. Exoskeleton Exploration: Research, Development, and Applicability of Industrial Exoskeletons in the Automotive Industry. Master’s Thesis, School of Engineering in Jönköping, Jönköping, Sweden, 2018. [Google Scholar]
- Aida, T.; Nozaki, H.; Kobayashi, H. Development of muscle suit and application to factory laborers. In Proceedings of the IEEE International Conference on Mechatronics and Automation (ICMA), Changchun, China, 9–12 August 2009; pp. 1027–1032. [Google Scholar]
- Hara, H.; Sankai, Y. Development of HAL for lumbar support. In Proceedings of the SCIS and ISIS 2010-Joint 5th International Conference on Soft Computing and Intelligent Systems and 11th International Symposium on Advanced Intelligent Systems, Okayama, Japan, 8–12 December 2010; pp. 416–421. [Google Scholar] [CrossRef]
- Luo, Z.; Yu, Y. Wearable stooping-assist device in reducing risk of low back disorders during stooped work. In Proceedings of the 2013 IEEE International Conference on Mechatronics and Automation, IEEE ICMA, Takamatsu, Japan, 4–7 August 2013; pp. 230–236. [Google Scholar] [CrossRef]
- Zhao, Y. Ergonomics basic data investigation and research. Ergonomics 2013, 19, 76–79. [Google Scholar]
- Chehrehrazi, M.; Sanjari, M.A.; Mokhtarinia, H.R.; Jamshidi, A.A.; Maroufi, N.; Parnianpour, M. Goal equivalent manifold analysis of task performance in non-specific LBP and healthy subjects during repetitive trunk movement: Effect of load, velocity, symmetry. Hum. Mov. Sci. 2017, 51, 72–81. [Google Scholar] [CrossRef]
- Hemami, H.; Jaswa, V.C. On a Three-Link Model of the Dynamics of Standing up and Sitting down. IEEE Trans. Syst. Man Cybern. 1978, 8, 115–120. [Google Scholar] [CrossRef]
- Hanavan, E.P., Jr. A Mathematical Model of the Human Body; Air Force Aerospace Medical Research Lab Wright-Patterson AFB: Wright, OH, USA, 1964. [Google Scholar]
- Toxiri, S.; Calanca, A.; Ortiz, J.; Fiorini, P.; Caldwell, D.G. A Parallel-Elastic Actuator for a Torque-Controlled Back-Support Exoskeleton. IEEE Robot. Autom. Lett. 2017, 1, 492–499. [Google Scholar] [CrossRef]
- Wehner, M.; Rempel, D.; Kazerooni, H. Lower Extremity Exoskeleton Reduces Back Forces in Lifting. In Proceedings of the Asme Dynamic Systems & Control Conference, Hollywood, CA, USA, 12–14 October 2009. [Google Scholar] [CrossRef]
- Bogduk, N.; Macintosh, J.E.; Pearcy, M.J. A Universal Model of the Lumbar Back Muscles in the Upright Position. Spine 1992, 17, 897–913. [Google Scholar] [CrossRef]
- Ferguson, S.A.; Marras, W.S.; Burr, D. Workplace design guidelines for asymptomatic vs. low-back-injured workers. Appl. Ergon. 2005, 36, 85–95. [Google Scholar] [CrossRef]
- Granata, K.P.; Marras, W.S. Cost–Benefit of Muscle Cocontraction in Protecting against Spinal Instability. Spine 2000, 25, 1398–1404. [Google Scholar] [CrossRef] [PubMed]
- Potvin, J.R.; Bent, L.R. A validation of techniques using surface EMG signals from dynamic contractions to quantify muscle fatigue during repetitive tasks. J. Electromyogr. Kinesiol. 1997, 7, 131–139. [Google Scholar] [CrossRef]
- Park, D.C.; Reuter-Lorenz, P. The adaptive brain: Aging and neurocognitive scaffolding. Annu. Rev. Psychol. 2009, 60, 173–196. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Romano, D.; Bloemberg, J.; Tannous, M.; Stefanini, C. Impact of Aging and Cognitive Mechanisms on High-Speed Motor Activation Patterns: Evidence from an Orthoptera-Robot Interaction. IEEE Trans. Med. Robot. Bionics 2020. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| # | Transition Conditions | Next State Machine | |
|---|---|---|---|
| ① | 3.Left Front Swing | ||
| ② | 4.Left Back Swing | ||
| ③ | 1.Upright | ||
| ④ | 5.Right Front Swing | ||
| ⑤ | 6.Right Back Swing | ||
| ⑥ | 1.Upright | ||
| ⑦ | 2.Semi-Squat | ||
| ⑧ | 1.Upright | ||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, W.; Zha, S.; Xia, Y.; Gu, J.; Lin, X. A Hip Active Assisted Exoskeleton That Assists the Semi-Squat Lifting. Appl. Sci. 2020, 10, 2424. https://doi.org/10.3390/app10072424
Wei W, Zha S, Xia Y, Gu J, Lin X. A Hip Active Assisted Exoskeleton That Assists the Semi-Squat Lifting. Applied Sciences. 2020; 10(7):2424. https://doi.org/10.3390/app10072424
Chicago/Turabian StyleWei, Wei, Shijia Zha, Yuxuan Xia, Jihua Gu, and Xichuan Lin. 2020. "A Hip Active Assisted Exoskeleton That Assists the Semi-Squat Lifting" Applied Sciences 10, no. 7: 2424. https://doi.org/10.3390/app10072424
APA StyleWei, W., Zha, S., Xia, Y., Gu, J., & Lin, X. (2020). A Hip Active Assisted Exoskeleton That Assists the Semi-Squat Lifting. Applied Sciences, 10(7), 2424. https://doi.org/10.3390/app10072424