Microscope 3D Point Spread Function Evaluation Method on a Confirmed Object Plane Perpendicular to the Optical Axis


Abstract
:Featured Application
Abstract
1. Introduction
2. Layout of PSF Measurement
- A linearly polarized beam of light originated from a fiber-coupled laser (mounted on an adjustor). The linearly polarized beam light could go through the polarization refractor plane and was divided in half by the polarization splitter plane.
- The light beam from the laser was the excitation light of a fluorescent particle. The cover slip acted as an emission filter [16] that only allowed the fluorescent particle’s emission light to travel into the microscope.
- When the linearly polarized light beam reached the Z-position measurement CCD (mounted on an adjustor) from the beam shifting corner cube (CC), after going through the quarter wave plate, it changed into circularly polarized light. A part of this light was reflected by the semi-transparent mirror parallel to the Z-position measurement CCD’s light-sensitive surface. Another part was directed into the Z-position measurement CCD. When the reflected part again went through the quarter wave plate, its linearly polarized direction was perpendicular to the original. This portion was reflected by the polarization refractor plane and directed into the dual PSD-based unit.
3. Core Technologies and Algorithms
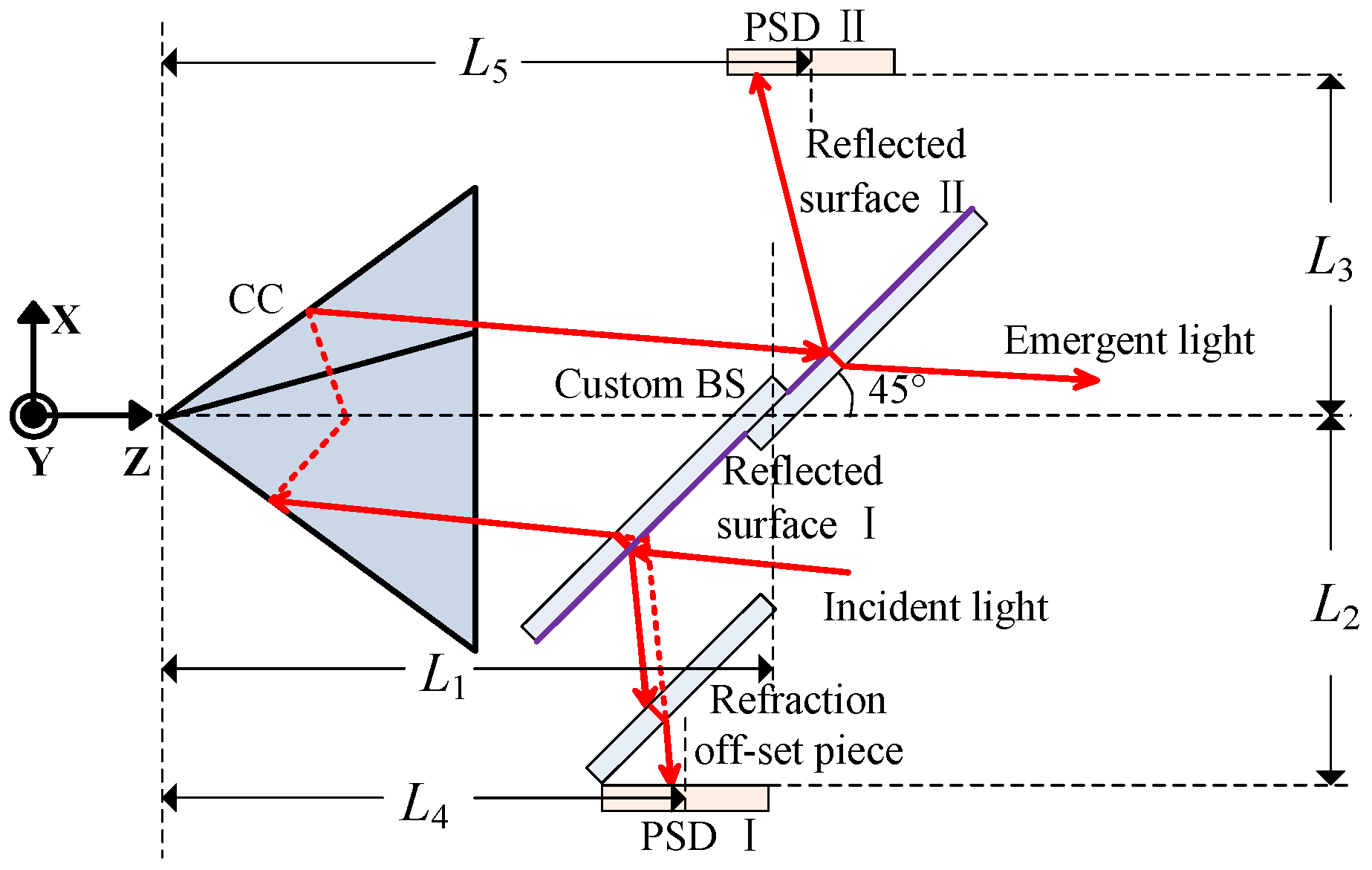
3.1. Measurement of the Direction of the Dual PSD-Based Unit’s Incident Beam
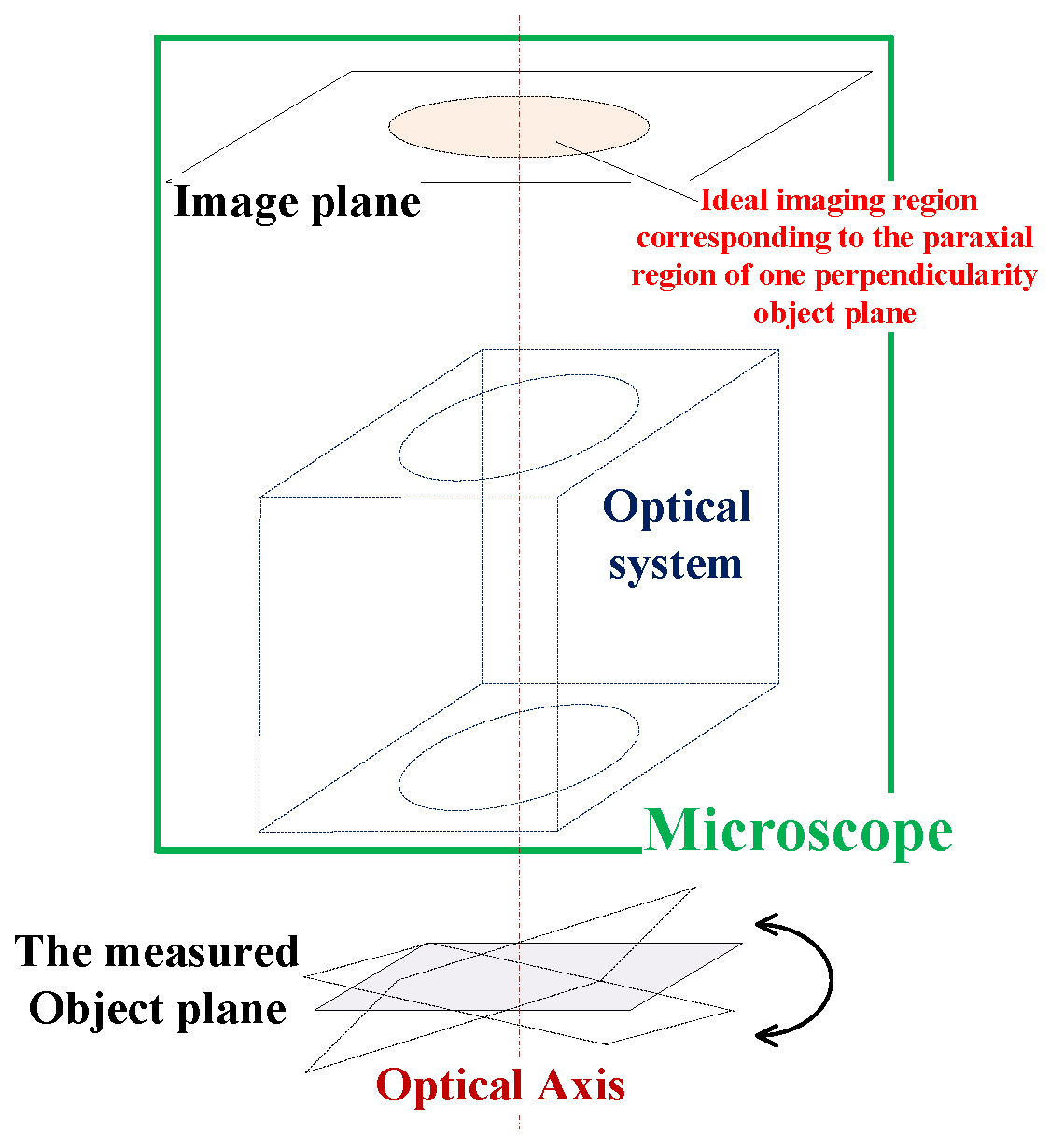
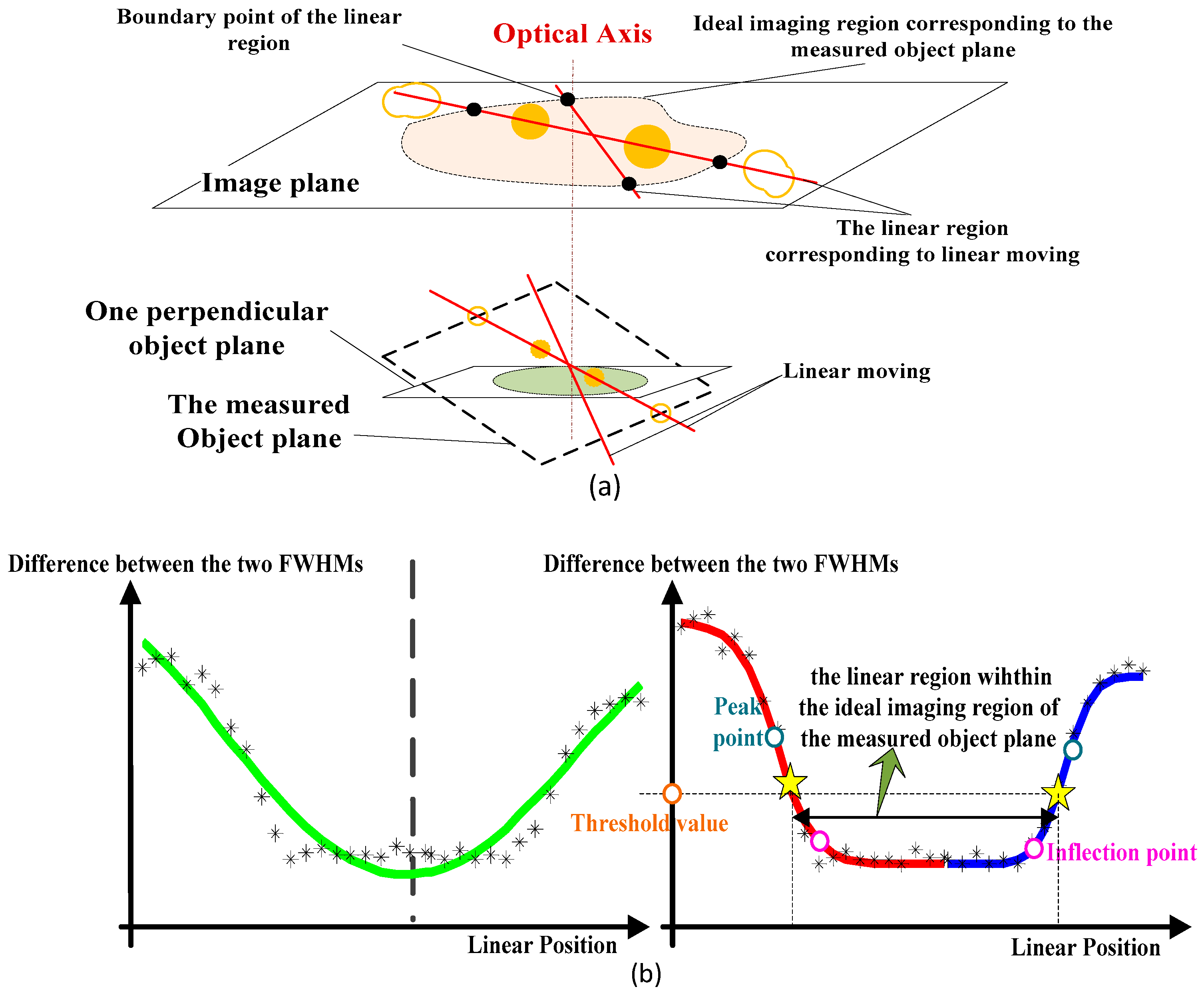
3.2. Paraxial Region and Object Plane Perpendicularity Determination
- Keep the measured object plane’s space attitude for the pitching and Z-axis position constant. Roll the measured object plane in a small range of –Angle to +Angle.
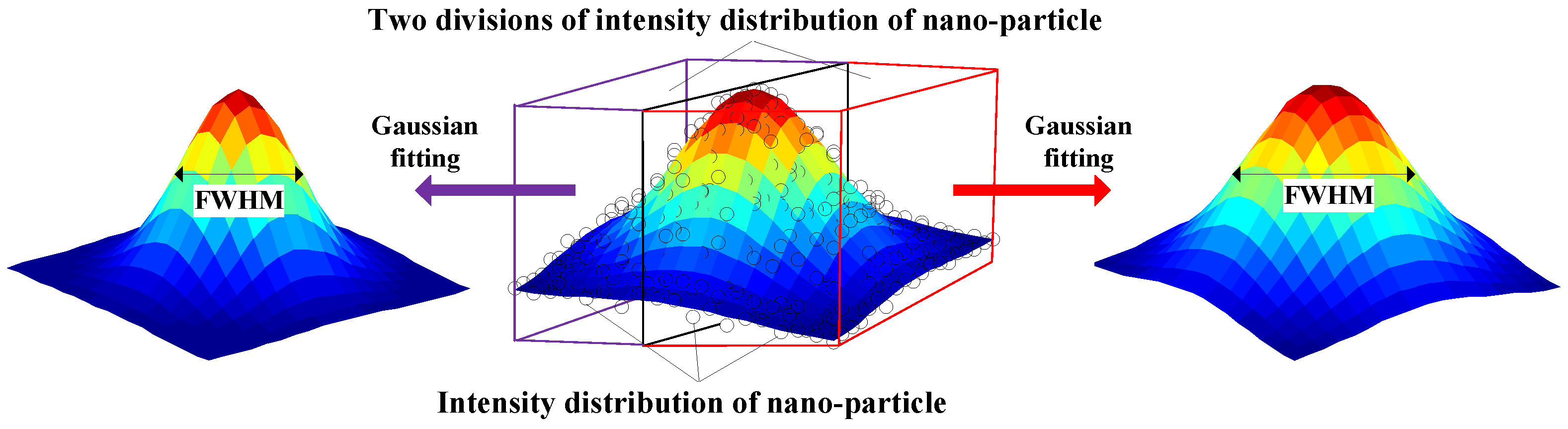
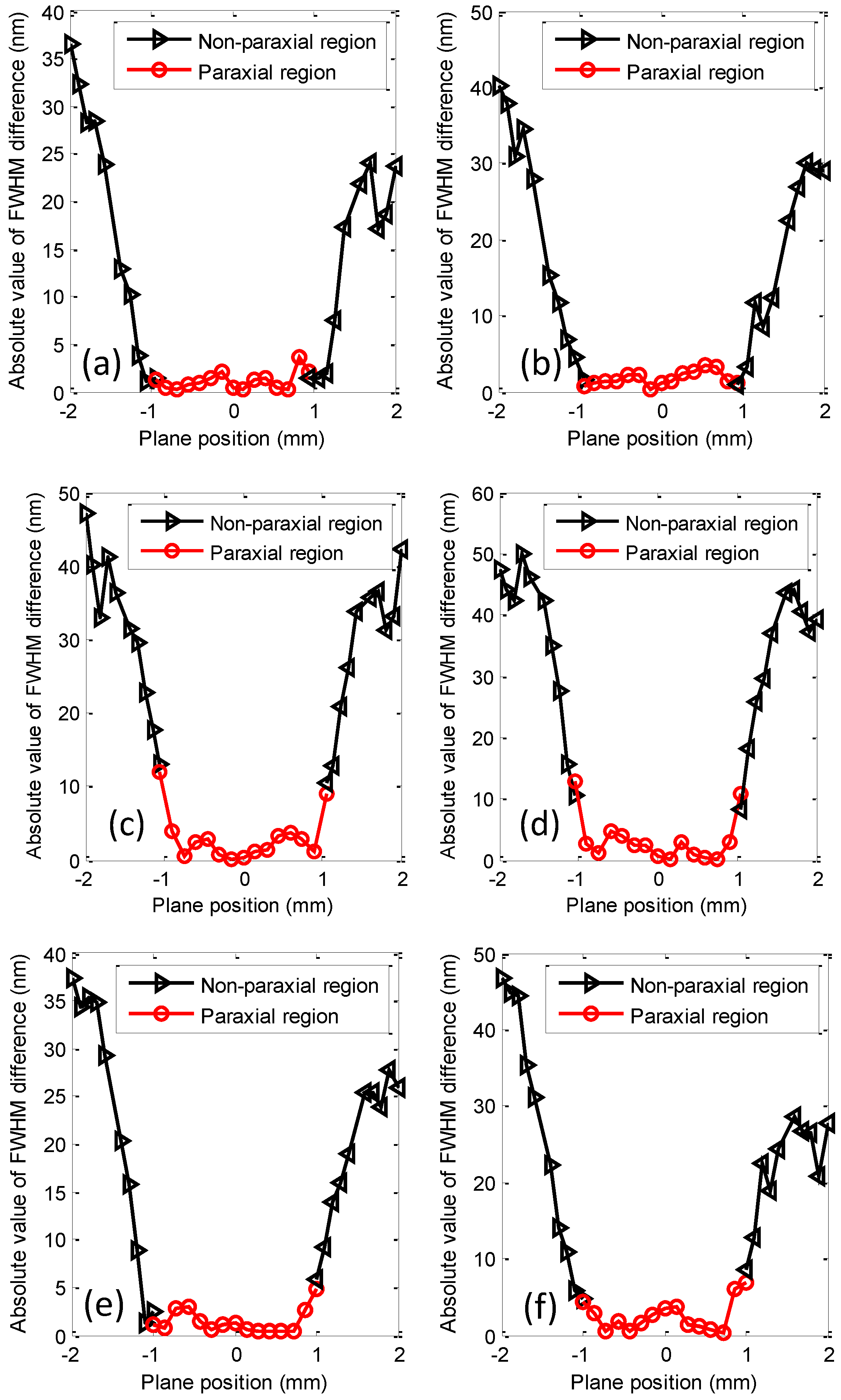
- After each rolling operation, apply the polynomial combining logistic curve fitting method stated above to determine the ideal imaging region of the measured object plane. In the ideal imaging region, choose the Gaussian function’s FWHM for one spot image as a reference object (here, the spot imaging nearest to the center of the ideal imaging region was chosen). Compare it with the Gaussian function’s FWHM for any other function in the two chosen lines within the ideal imaging region, obtain the difference’s mean square root (RMS) for each compared pair, record the average of these RMS values for the current rolling space attitude, and then choose the measured object plane corresponding to the smallest average of all rolling space attitudes.
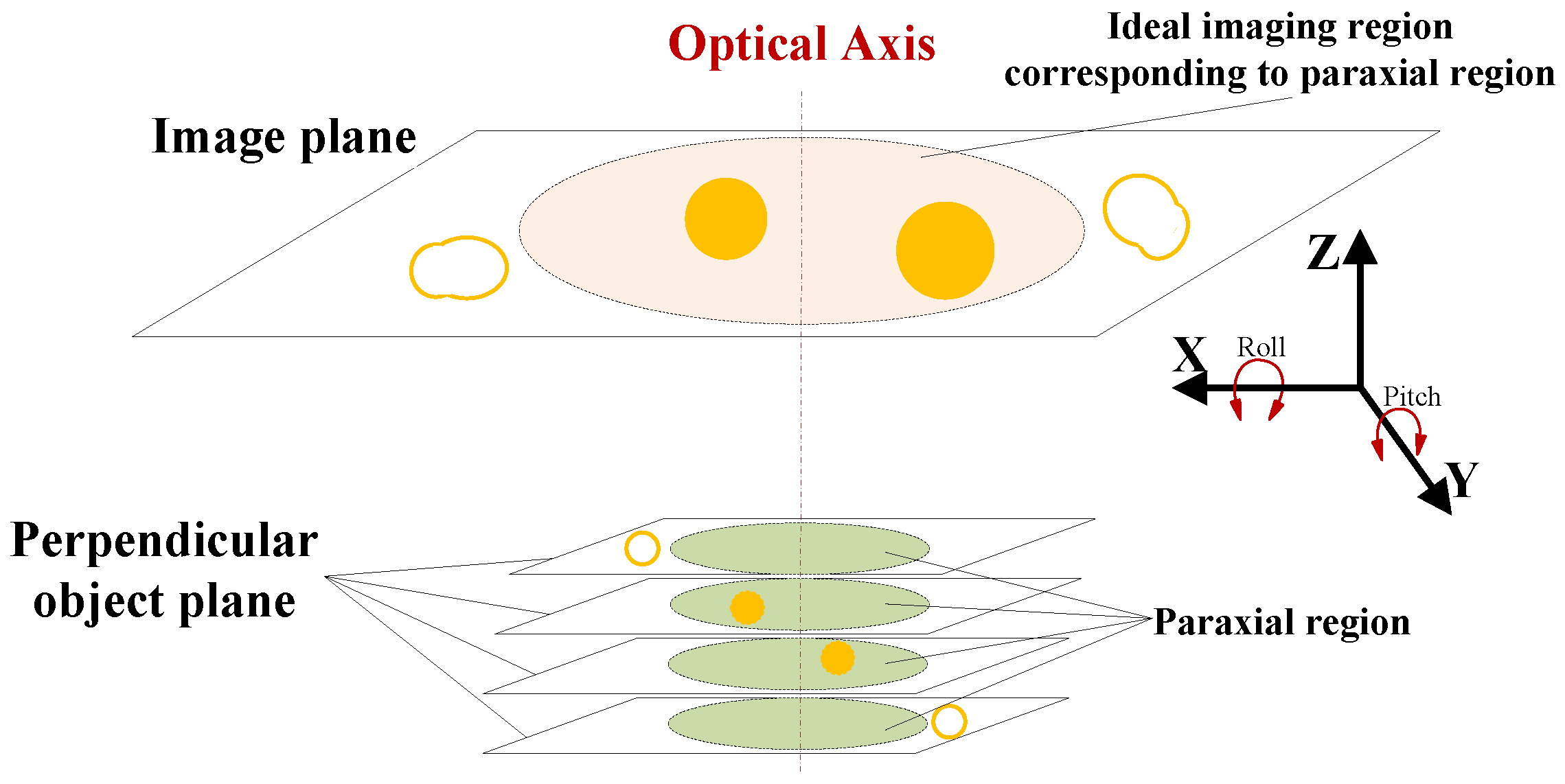
- Keep the rolling and Z-axis position of the obtained object plane space attitude constant. Pitch the object plane in a small range and carry out the same operations in steps 1–2. The chosen object plane on this step is one object plane that is perpendicular to the optical axis. Then, again run the polynomial combining logistic curve fitting method on the perpendicular object plane to confirm its ideal imaging region. The paraxial region on some perpendicular object plane has its corresponding ideal imaging region on the image plane (Figure 4). Thus, the confirmation of this ideal imaging region is equal to the confirmation of the paraxial region of the perpendicular object plane.
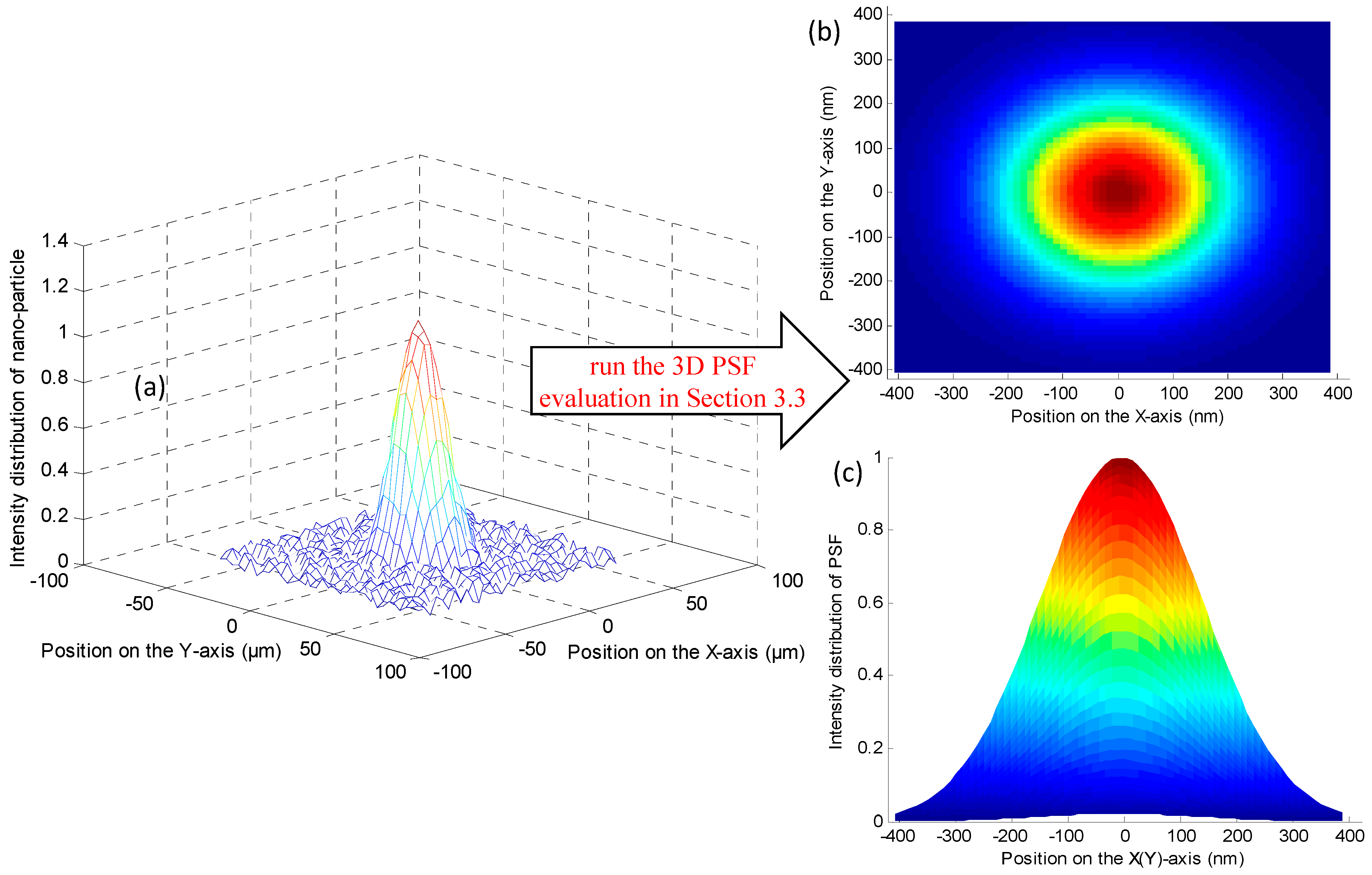
3.3. D PSF Evaluation
4. Entire 3D PSF Evaluation Procedure
- Place a fluorescent nanoparticle under the microscope for imaging. Adjust the fiber-coupled laser to make its unit direction vector <0, 0, –1> in the coordinates determined by the dual PSD-based unit.
- Determine the object plane’s perpendicularity and the paraxial region, as detailed in Section 3.2. There are a few points to note during this process: i. The PSF calibration module’s spatial orientation (rolling angle α and pitching angle β) and the PSF calibration module’s plane position both need to be confirmed. It is clear that the PSF calibration module’s plane position assurance can be realized by the dual PSD-based unit’s CCD (Figure 2). The PSF calibration module’s spatial orientation can be confirmed by observing the variation of the PSF calibration module’s spatial orientation. The unit direction vector of the light beam from the fiber-coupled laser becomes <mX, nY, qZ >, which is obtained by the dual PSD-based unit. Therefore, according to the transformation of the rectangular coordinates in space, α and β can be solved by the following matrix:ii. After each rolling (or pitching) operation in the procedure of obtaining one object plane that is perpendicular to the optical axis (Section 3.2), the measured object plane is the X–Y plane of the coordinates determined by the dual PSD-based unit, and the unwanted rolling angle and pitching angle caused by movement can also be obtained with Equation (8). The six-degree-freedom macro/micro displacement platform is able to compensate for unwanted spatial orientation according to the rolling and pitching angles that are needed to keep the PSF calibration module’s spatial orientation constant during the process of determining the ideal imaging region of the measured object plane (step 2 in Section 3.2). iii. After each rolling (or pitching) operation, the fiber-coupled laser must be adjusted to make its unit direction vector <0, 0, –1> again and to adjust the Z-position measurement CCD to make the light beam reflected by the semi-transparent mirror normal (namely, to make the unit direction vector of the light beam reflected by the semi-transparent mirror <0, 0, –1> in the coordinates determined by the dual PSD-based unit). Then, the PSF calibration module’s Z-axis direction position in its own coordinates can be confirmed (Z-axis direction position variation can be measured) to make sure the PSF calibration module (fluorescent particle) can stably move on the measured object plane (the X–Y plane of the dual PSD-based unit’s coordinates) and keep its longitudinal space position unchanged.
- After the two steps above, one object plane that is perpendicular to the optical axis is confirmed, and the Z-axis of the dual PSD-based unit’s coordinates becomes the optical axis. The Z-position measurement CCD is adjusted to normally reflect the light beam by the semi-transparent mirror. The light is transmitted through the semi-transparent mirror incidents into the Z-position measurement CCD. Then, the PSF calibration module’s (fluorescent particle’s) Z-axis direction position (longitudinal space position along the optical axis) can be measured by the Z-position measurement’s CCD.
- The polynomial combining logistic curve fitting method is run on different perpendicular object planes along the Z-axis (the optical axis) to determine the paraxial regions. This also determines the magnifications of different perpendicular object planes through the planar translational: magnification = the measured XY displacements on the image plane/the XY displacement measured by the dual PSD-based unit.
- Finally, the 3D PSF evaluation in Section 3.3 is run for perpendicular object planes along the Z-axis to obtain the microscope’s 3D PSF.
5. Experiments and Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Robens, C.; Brakhane, S.; Alt, W.; Kleißler, F.; Meschede, D.; Moon, G.; Ramola, G.; Alberti, A. High numerical aperture (NA = 0.92) objective lens for imaging and addressing of cold atoms. Opt. Lett. 2017, 42, 1043–1046. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kawata, S.; Arimoto, R.; Nakamura, O. Three-dimensional optical-transfer-function analysis for a laser-scan fluorescence microscope with an extended detector. J. Opt. Soc. Am. A 1991, 8, 171–175. [Google Scholar] [CrossRef]
- Bishara, W.; Su, T.-W.; Coskun, A.F.; Ozcan, A. Lensfree on-chip microscopy over a wide field-of-view using pixel super-resolution. Opt. Express 2010, 18, 11181–11191. [Google Scholar] [CrossRef] [PubMed]
- Nakamura, O.; Kawata, S. Three-dimensional transfer-function analysis of the tomographic capability of a confocal fluorescence microscope. J. Opt. Soc. Am. A 1990, 7, 522–526. [Google Scholar] [CrossRef]
- Rust, M.J.; Bates, M.; Zhuang, X. Sub-diffraction-limit imaging by stochastic optical reconstruction microscopy (STORM). Nat. Methods 2006, 3, 793–795. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Holden, S.J.; Uphoff, S.; Kapanidis, A.N. DAOSTORM: An algorithm for high—Density super-resolution microscopy. Nat. Methods 2011, 8, 279–280. [Google Scholar] [CrossRef] [PubMed]
- Zhu, L.; Zhang, W.; Elnatan, D.; Huang, B. Faster STORM using compressed sensing. Nat. Methods 2012, 9, 721–723. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vermeulen, P.; Zhan, H.; Orieux, F.; Olivo-Marin, J.C.; Lenkei, Z.; Loriette, V.; Fragola, A. Out-of-focus background subtraction for fast structured illumination super-resolution microscopy of optically thick samples. J. Microsc. 2015, 259, 257–268. [Google Scholar] [CrossRef] [PubMed]
- Somekh, M.G.; Hsu, K.; Pitter, M.C. Effect of processing strategies on the stochastic transfer function in structured illumination microscopy. J. Opt. Soc. Am. A 2011, 28, 1925–1934. [Google Scholar] [CrossRef]
- Somekh, M.G.; Hsu, K.; Pitter, M.C. Stochastic transfer function for structured illumination microscopy. J. Opt. Soc. Am A 2009, 26, 1630–1637. [Google Scholar] [CrossRef] [PubMed]
- Somekh, M.G.; Hsu, K.; Pitter, M.C. Resolution in structured illumination microscopy: A probabilistic approach. J. Opt. Soc. Am. A 2008, 25, 1319–1329. [Google Scholar] [CrossRef] [PubMed]
- Haeberlé, O. Focusing of light through a stratified medium: A practical approach for computing microscope point spread functions. Part I: Conventional microscopy. Opt. Commun. 2003, 216, 55–63. [Google Scholar] [CrossRef] [Green Version]
- Rust, M.J.; Mongis, C.; Knop, M. PSFj: Know your fluorescence microscope. Nat. Methods 2014, 11, 981–982. [Google Scholar]
- Hirvonen, L.M.; Wicker, K.; Mandula, O.; Heintzmann, R. Structured illumination microscopy of a living cell. Eur. Biophys. J. 2009, 38, 807–812. [Google Scholar] [CrossRef] [PubMed]
- Hu, P.; Mao, S.; Tan, J.B. Compensation of errors due to incident beam drift in a 3 DOF measurement system for linear guide motion. Opt. Express 2015, 23, 28389–28401. [Google Scholar] [CrossRef] [PubMed]
- Selvaggi, L.; Salemme, M.; Vaccaro, C.; Pesce, G.; Rusciano, G.; Sasso, A.; Campanella, C.; Carotenuto, R. Multiple-Particle-Tracking to investigate viscoelastic properties in living cells. Methods 2010, 51, 20–26. [Google Scholar] [CrossRef] [PubMed]
- Mao, S.; Hu, P.; Ding, X.; Tan, J. Parameter correction method for dual position-sensitive-detector-based unit. Appl. Opt. 2016, 55, 4073–4078. [Google Scholar] [CrossRef] [PubMed]
- Van Der Voort, H.T.M.; Strasters, K.C. Restoration of confocal images for quantitative image analysis. J. Microsc. 1995, 178, 165–181. [Google Scholar] [CrossRef]
- Sarder, P.; Nehorai, A. Deconvolution methods for 3-D fluorescence microscopy images. IEEE Signal Process. Mag. 2006, 23, 32–45. [Google Scholar] [CrossRef]
- Tao, Q.; He, X.; Zhao, J.; Teng, Q.; Chen, J. Image Estimation Based on Depth-Variant Imaging Model in Three-Dimensional Microscopy. In Proceedings of the SPIE—The International Society for Optical Engineering, Beijing, China, 8 February 2005. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| a | b | c | ||
|---|---|---|---|---|
| Z-axis positive direction | 8.11 × 10−30 | −9.86 × 10−30 | −1.11 × 10−16 | 2.08 × 10−14 |
| Z-axis negative direction | 1.14 × 10−28 | −1.64 × 10−28 | 1.12 × 10−16 | 2.08 × 10−14 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mao, S.; Wang, Z.; Pan, J. Microscope 3D Point Spread Function Evaluation Method on a Confirmed Object Plane Perpendicular to the Optical Axis. Appl. Sci. 2020, 10, 2430. https://doi.org/10.3390/app10072430
Mao S, Wang Z, Pan J. Microscope 3D Point Spread Function Evaluation Method on a Confirmed Object Plane Perpendicular to the Optical Axis. Applied Sciences. 2020; 10(7):2430. https://doi.org/10.3390/app10072430
Chicago/Turabian StyleMao, Shuai, Zhenzhou Wang, and Jinfeng Pan. 2020. "Microscope 3D Point Spread Function Evaluation Method on a Confirmed Object Plane Perpendicular to the Optical Axis" Applied Sciences 10, no. 7: 2430. https://doi.org/10.3390/app10072430
APA StyleMao, S., Wang, Z., & Pan, J. (2020). Microscope 3D Point Spread Function Evaluation Method on a Confirmed Object Plane Perpendicular to the Optical Axis. Applied Sciences, 10(7), 2430. https://doi.org/10.3390/app10072430