Feasibility of LoRa for Smart Home Indoor Localization

Abstract
:1. Introduction
2. Literature Review
2.1. Radio Frequency Identification Device (RFID)
2.2. Bluetooth Low Energy (BLE)
2.3. ZigBee
2.4. Ultra-Wideband (UWB)
2.5. Long Range (LoRa)
2.6. Objectives and Scope
3. Experiment and Evaluation
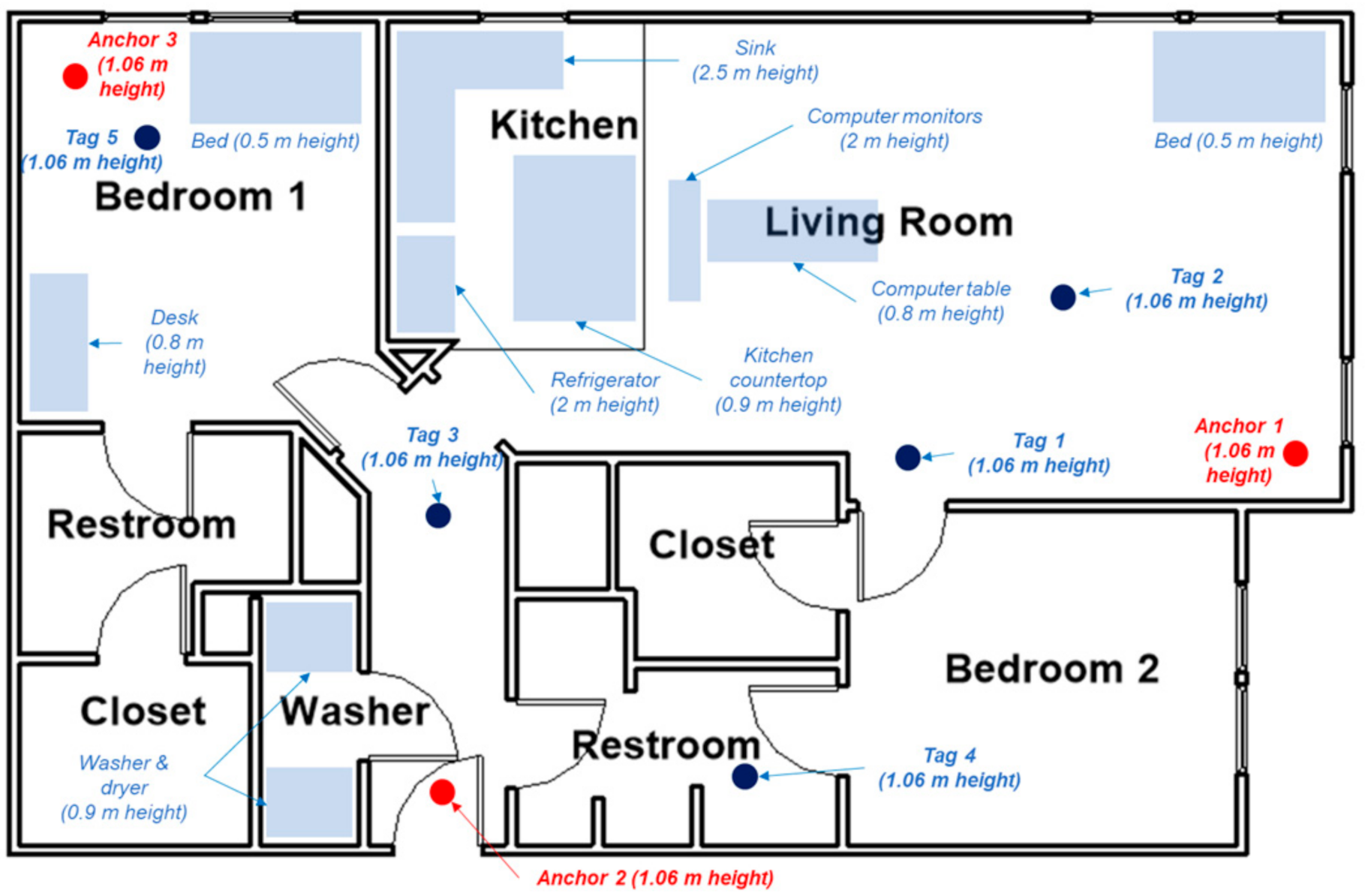
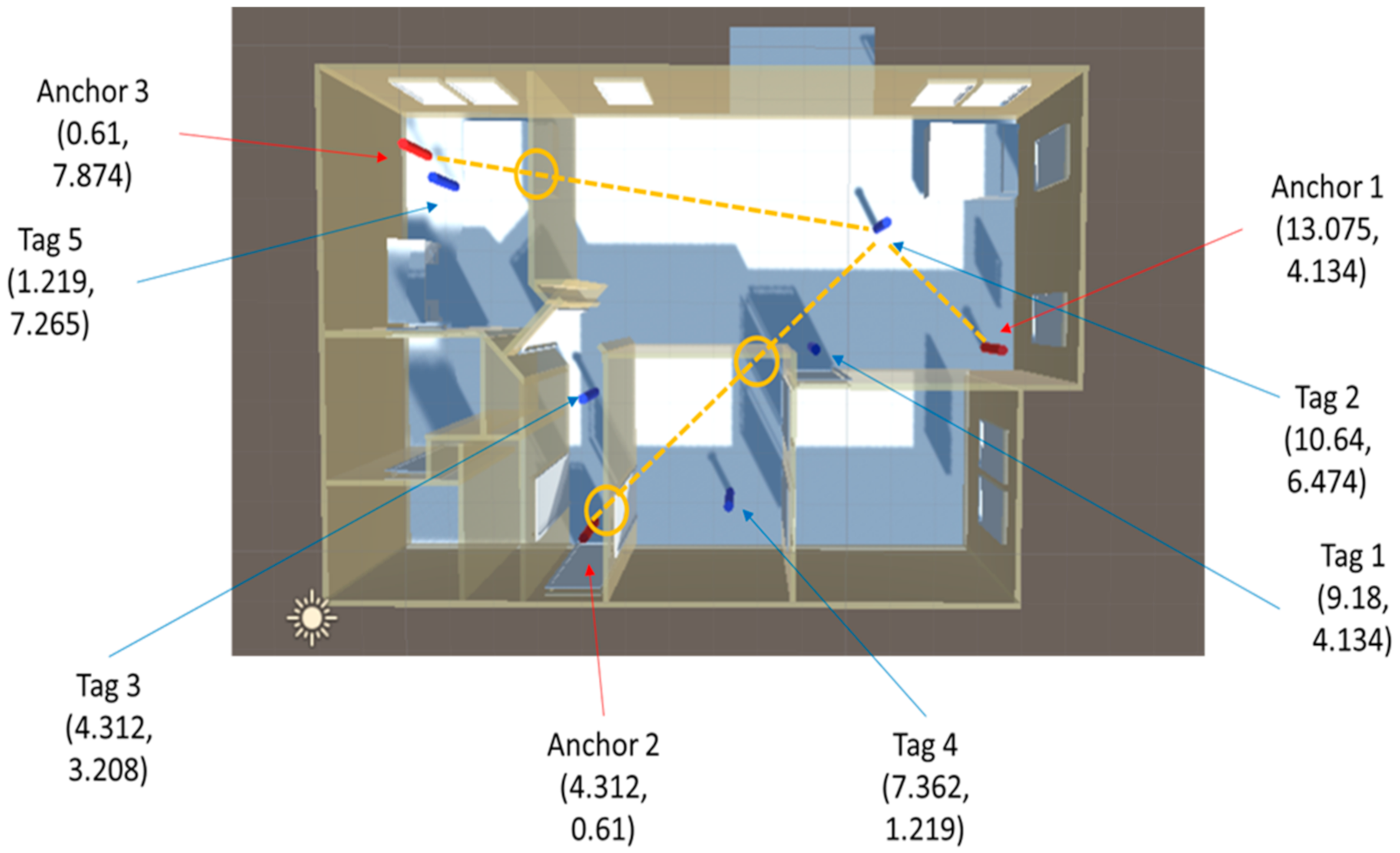
3.1. Experimental Setup
3.1.1. Testing Environment
3.1.2. Data Collection
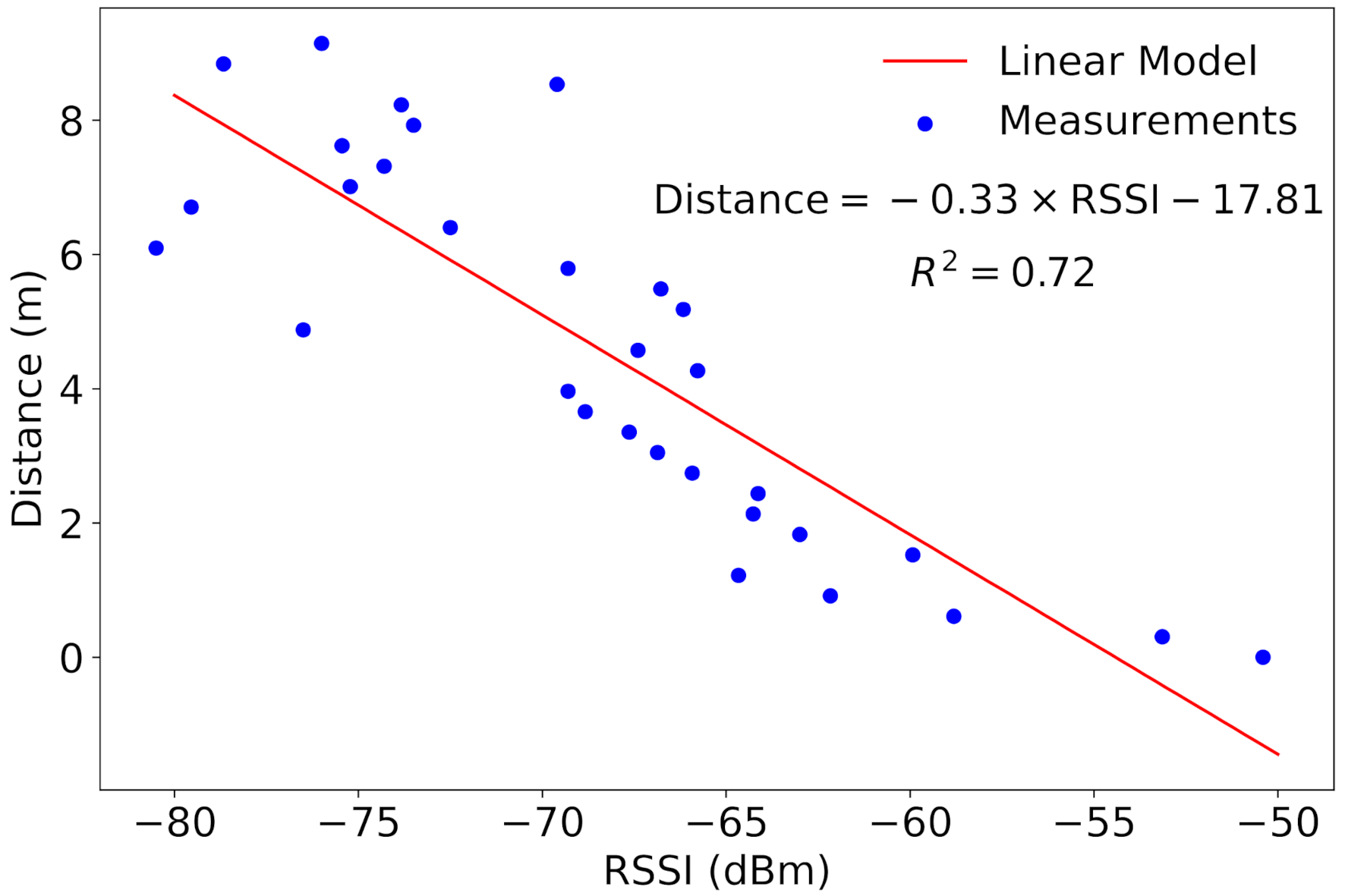
3.2. Calibration
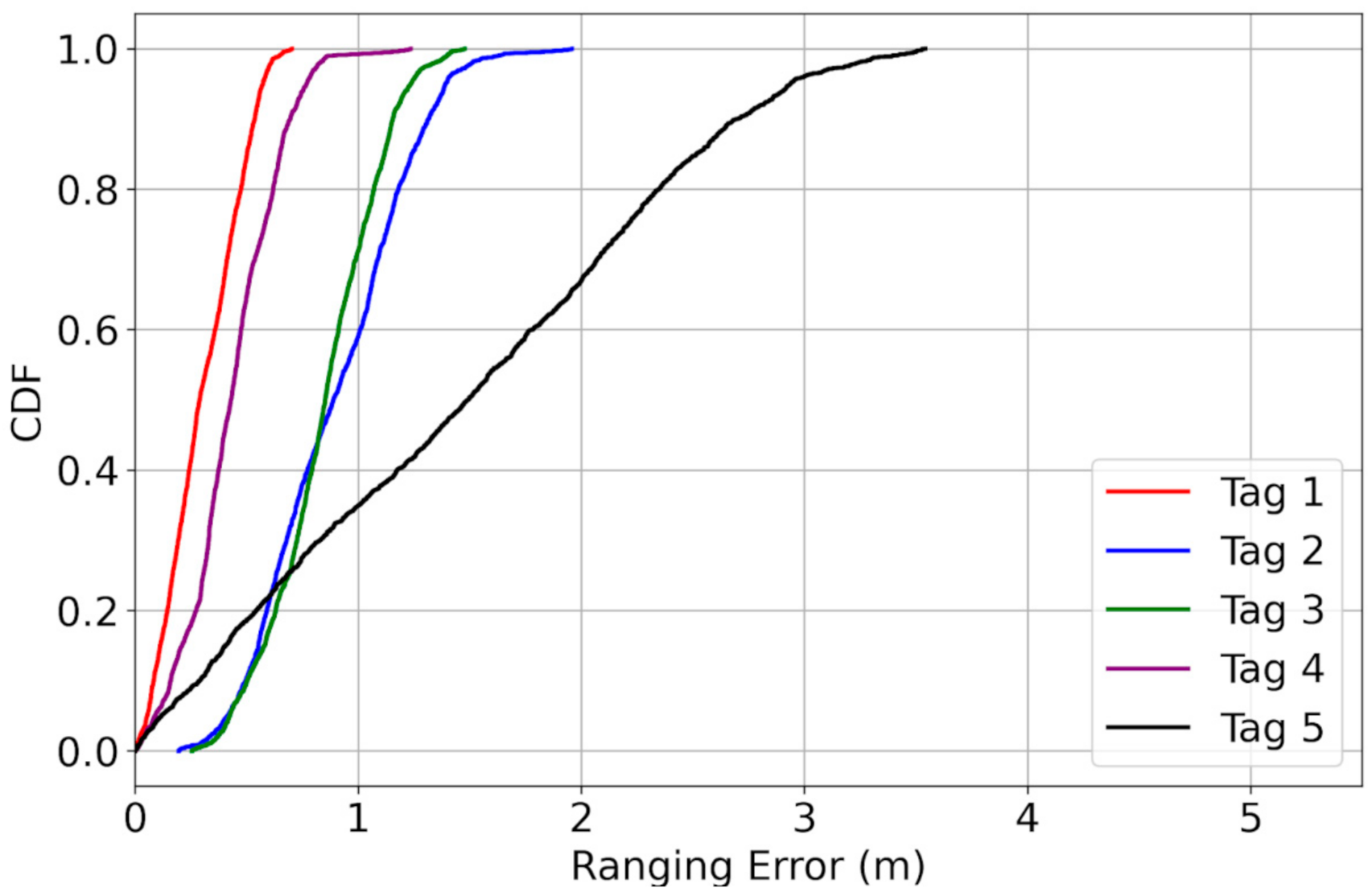
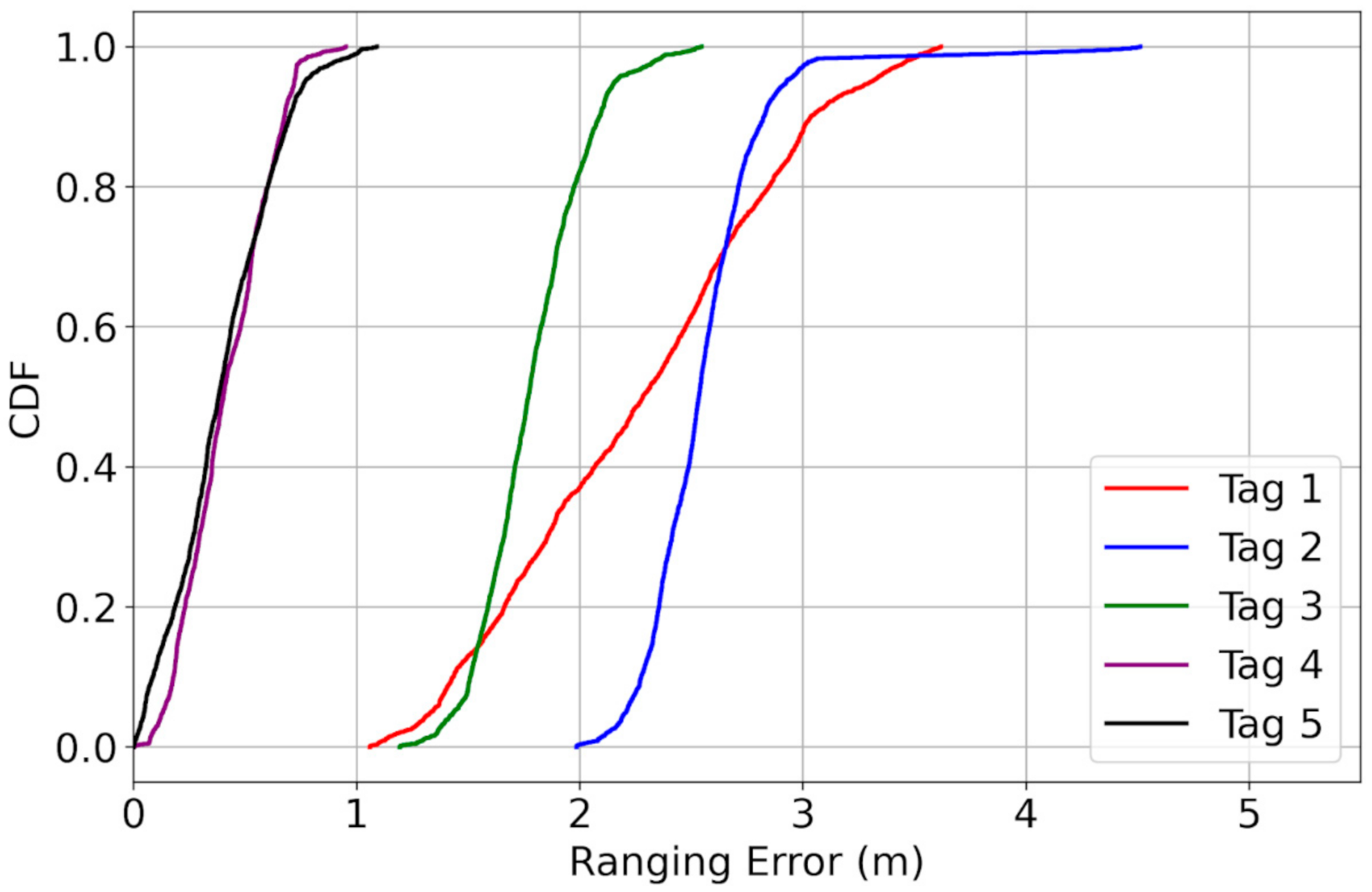
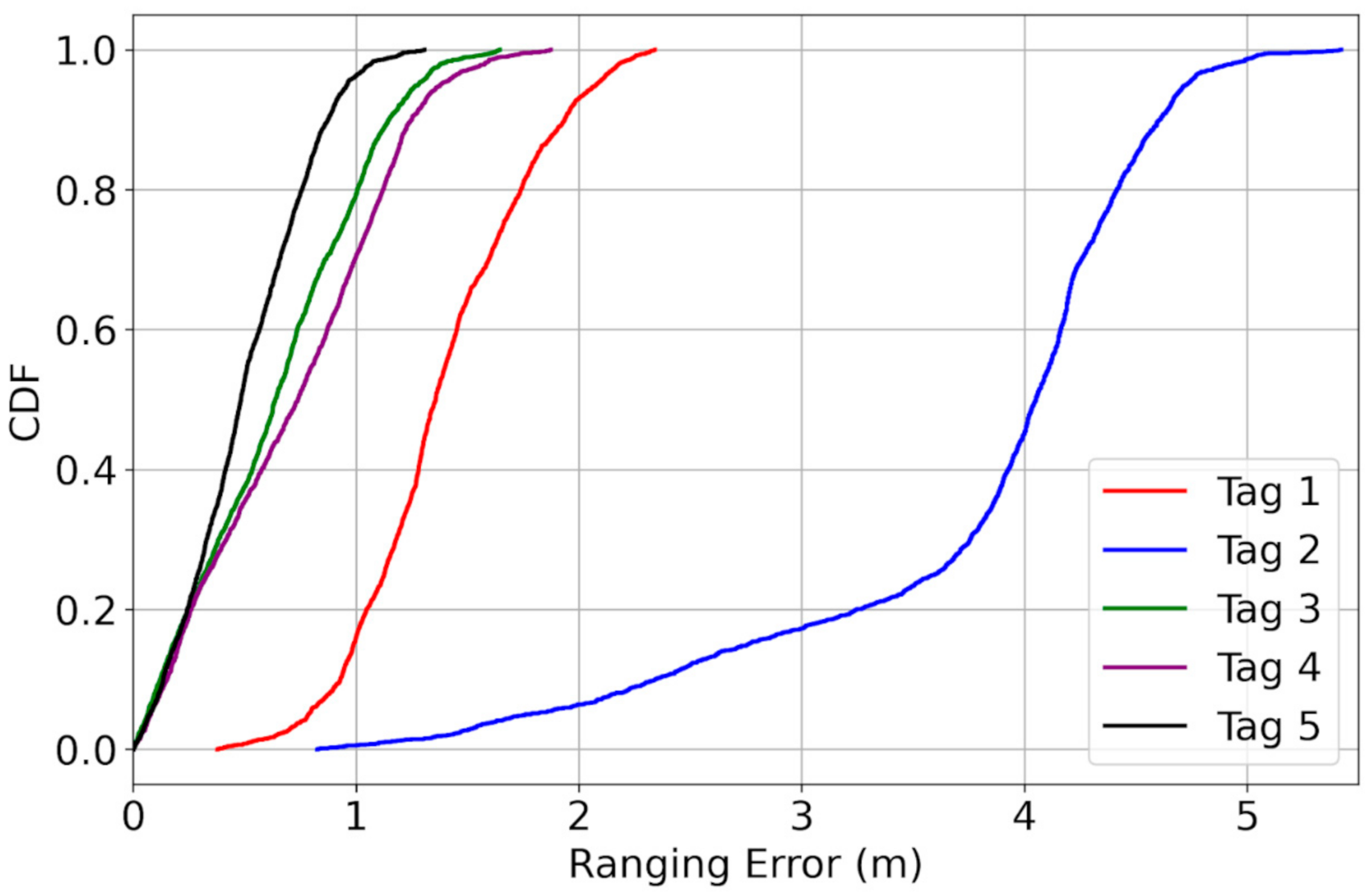
3.3. Ranging Performance
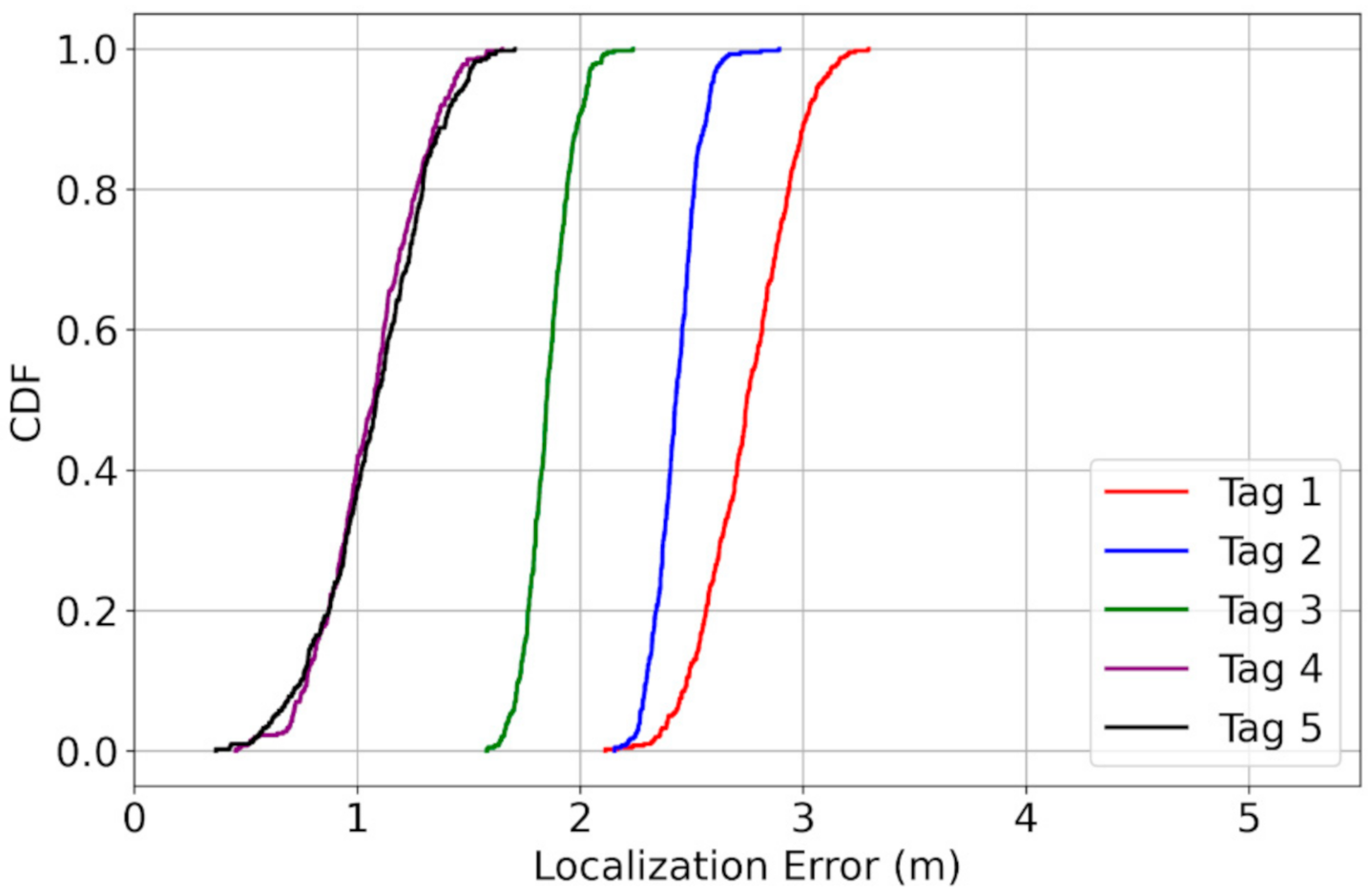
3.4. Localization Performance
4. Discussion
4.1. Accuracy
4.2. Scalability
4.3. Localization
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Alam, M.R.; Reaz, M.B.I.; Ali, M.A.M. A review of smart homes–Past, present, and future. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2012, 42, 1190–1203. [Google Scholar] [CrossRef]
- Ghourchian, N.; Allegue-Martinez, M.; Precup, D. Real-Time Indoor Localization in Smart Homes Using Semi-Supervised Learning. In Proceedings of the 29th Innovative Applications of Artificial Intelligence Conference, San Francisco, CA, USA, 6–9 February 2017; pp. 1–8. [Google Scholar]
- Betke, M.; Gurvits, L. Mobile robot localization using landmarks. IEEE Trans. Robot. Autom. 1997, 13, 251–263. [Google Scholar] [CrossRef] [Green Version]
- Wireless Communications: Principles and Practice. Available online: http://ee.sharif.edu/~wireless.comm.net/references/Rappaport%20-%20Wireless%20Communications,Principles%20and%20Practice-ISBN%200130422320.pdf (accessed on 4 January 2021).
- Fundamentals of Wireless Communication. Available online: https://web.stanford.edu/~dntse/wireless_book.html (accessed on 4 January 2021).
- Zafari, F.; Gkelias, A.; Leung, K.K. A Survey of Indoor Localization Systems and Technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar] [CrossRef] [Green Version]
- Domestic robotics. Available online: https://link.springer.com/chapter/10.1007/978-3-319-32552-1_65 (accessed on 4 January 2021).
- van Haute, T.; de Poorter, E.; Lemic, F.; Handziski, V.; Wirström, N.; Voigt, T.; Wolisz, A.; Moerman, I. Platform for benchmarking of RF-based indoor localization solutions. IEEE Commun. Mag. 2015, 53, 126–133. [Google Scholar] [CrossRef] [Green Version]
- Behboodi, A.; de Poorter, E.; Handziski, V.; Crombez, P.; de Las Heras, J.J.; Lemic, F.; Moerman, I.; van Haute, T.; Verhoeve, P.; Voigt, T.; et al. Evaluation of RF-based Indoor Localization Solutions for the Future Internet. In Proceedings of the Future Network and Mobile Summit 2013 Conference Proceedings, Lisbon, Portugal, 3–5 July 2013. [Google Scholar]
- Doberstein, D.; Doberstein, D. Introduction to the Global Positioning System. In Fundamentals of GPS Receivers; Springer: New York, NY, USA, 2012; pp. 23–37. ISBN 9781461404088. [Google Scholar]
- Olsen, E.A.; Park, C.W.; How, J.P. 3D formation flight using differential carrier-phase GPS sensors. Navig. J. Inst. Navig. 1999, 46, 35–48. [Google Scholar] [CrossRef]
- Ni, L.M.; Liu, Y.; Lau, Y.C.; Patil, A.P. LANDMARC: Indoor location sensing using active RFID. In Proceedings of the 1st IEEE International Conference on Pervasive Computing and Communications, PerCom 2003, Fort Worth, TX, USA, 23–26 March 2003; pp. 407–415. [Google Scholar]
- Jin, G.Y.; Lu, X.Y.; Park, M.S. An indoor localization mechanism using active RFID tag. In Proceedings of the IEEE International Conference on Sensor Networks, Ubiquitous, and Trustworthy Computing, Taichung, Taiwan, 5–7 June 2006; Volume 2006 II, pp. 40–43. [Google Scholar]
- Fortin-Simard, D.; Bouchard, K.; Gaboury, S.; Bouchard, B.; Bouzouane, A. Accurate passive RFID localization system for smart homes. In Proceedings of the 2012 IEEE 3rd International Conference on Networked Embedded Systems for Every Application, NESEA 2012, Liverpool, UK, 13–14 December 2012. [Google Scholar]
- Wu, H.; Wu, X.; Tian, G. Indoor robot localization based on single RFID tag. Artif. Life Robot. 2018, 23, 373–379. [Google Scholar] [CrossRef]
- Wang, C.S.; Huang, C.H.; Chen, Y.S.; Zheng, L.J. An implementation of positioning system in indoor environment based on active RFID. In Proceedings of the 2009 Joint Conferences on Pervasive Computing, JCPC 2009, Tamsui, Taipei, Taiwan, 3–5 December 2009; pp. 71–76. [Google Scholar]
- Razavi, S.N.; Haas, C.T. Using reference RFID tags for calibrating the estimated locations of construction materials. In Proceedings of the Automation in Construction; Elsevier: Amsterdam, The Netherlands, 2011; Volume 20, pp. 677–685. [Google Scholar]
- Design and Calibration of the SpotON Ad-Hoc Location Sensing System. Available online: http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.23.6231 (accessed on 4 January 2021).
- Chawla, V.; Ha, D.S. An Overview of Passive RFID. IEEE Commun. Mag. 2007, 45, 11–17. [Google Scholar] [CrossRef]
- Yu, K.; Oppermann, I. Performance of UWB position estimation based on time-of-arrival measurements. In Proceedings of the 2004 International Workshop on Ultra Wideband Systems; Joint with Conference on Ultra Wideband Systems and Technologies; Joint UWBST and IWUWBS 2004, Kyoto, Japan, 18–21 May 2004; pp. 400–404. [Google Scholar]
- Otim, T.; Bahillo, A.; Diez, L.E.; Lopez-Iturri, P.; Falcone, F. Towards Sub-Meter Level UWB Indoor Localization Using Body Wearable Sensors. IEEE Access 2020, 8, 178886–178899. [Google Scholar] [CrossRef]
- Faragher, R.; Harle, R. Location fingerprinting with bluetooth low energy beacons. IEEE J. Sel. Areas Commun. 2015, 33, 2418–2428. [Google Scholar] [CrossRef]
- Park, J.W.; Yang, X.; Cho, Y.K.; Seo, J. Improving dynamic proximity sensing and processing for smart work-zone safety. Autom. Constr. 2017, 84, 111–120. [Google Scholar] [CrossRef]
- Finding objects using UWB or BLE localization technology: A museum-like use case. Available online: https://ieeexplore.ieee.org/document/8115865 (accessed on 4 January 2021).
- LoRaIn: Making a Case for LoRa in Indoor Localization. Available online: https://ieeexplore.ieee.org/document/8730767 (accessed on 4 January 2021).
- Islam, B.; Islam, M.T.; Nirjon, S. Feasibility of LoRa for Indoor Localization. Available online: https://pdfs.semanticscholar.org/ab00/c1eacbdd76732b7438ec8e5653f7c875def4.pdf (accessed on 4 January 2021).
- Chen, Y.; Han, D. Water quality monitoring in smart city: A pilot project. Autom. Constr. 2018, 89, 307–316. [Google Scholar] [CrossRef] [Green Version]
- Teizer, J.; Neve, H.; Li, H.; Wandahl, S.; König, J.; Ochner, B.; König, M.; Lerche, J. Construction resource efficiency improvement by Long Range Wide Area Network tracking and monitoring. Autom. Constr. 2020, 116, 103245. [Google Scholar] [CrossRef]
- Kwant.ai Partners with Global LoRaWAN® Leader Actility to Offer Advanced IoT Solutions for Smart Construction. Available online: https://www.kwant.ai/blog/2020/10/20/kwantai-partners-with-global-lorawan-leader-actility-to-offer-advanced-iot-solutions-for-smart-construction (accessed on 7 November 2020).
- Fang, Y.; Cho, Y.K.; Zhang, S.; Perez, E. Case Study of BIM and Cloud–Enabled Real-Time RFID Indoor Localization for Construction Management Applications. J. Constr. Eng. Manag. 2016, 142, 05016003. [Google Scholar] [CrossRef]
- Jaselskis, E.J.; El-Misalami, T. Implementing Radio Frequency Identification in the Construction Process. J. Constr. Eng. Manag. 2003, 129, 680–688. [Google Scholar] [CrossRef]
- Yabuki, N.; Oyama, T. Application of radio frequency identification technology for management of light weight temporary facility members. Available online: https://ascelibrary.org/doi/abs/10.1061/40937%28261%2983 (accessed on 4 January 2021).
- Vorst, P.; Schneegans, S.; Yang, B.; Zell, A. Self-localization with RFID snapshots in densely tagged environments. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS, Nice, France, 22–26 September 2008; pp. 1353–1358. [Google Scholar]
- Baeg, S.H.; Park, J.H.; Koh, J.; Park, K.W.; Baeg, M.H. Building a smart home environment for service robots based on RFID and sensor networks. In Proceedings of the ICCAS 2007–International Conference on Control, Automation and Systems, Seoul, Korea, 17–20 October 2007; pp. 1078–1082. [Google Scholar]
- Huynh, S.; Parry, D.; Fong, A.C.M.; Tang, J. Novel RFID and ontology based home localization system for misplaced objects. IEEE Trans. Consum. Electron. 2014, 60, 402–410. [Google Scholar] [CrossRef] [Green Version]
- Park, J.; Kim, K.; Cho, Y.K. Framework of Automated Construction-Safety Monitoring Using Cloud-Enabled BIM and BLE Mobile Tracking Sensors. J. Constr. Eng. Manag. 2017, 143, 05016019. [Google Scholar] [CrossRef]
- Park, J.; Marks, E.; Cho, Y.K.; Suryanto, W. Performance Test of Wireless Technologies for Personnel and Equipment Proximity Sensing in Work Zones. J. Constr. Eng. Manag. 2016, 142, 04015049. [Google Scholar] [CrossRef]
- Mokhtari, G.; Anvari-Moghaddam, A.; Zhang, Q.; Karunanithi, M. Multi-residential activity labelling in smart homes with wearable tags using BLE technology. Sensors 2018, 18, 908. [Google Scholar] [CrossRef] [Green Version]
- localization using RSSI measurements and iRingLA. Available online: https://hal.archives-ouvertes.fr/hal-01387824/document (accessed on 4 January 2021).
- Huh, J.H.; Bu, Y.; Seo, K. Bluetooth-tracing RSSI sampling method as basic technology of indoor localization for smart homes. Int. J. Smart Home 2016, 10, 9–22. [Google Scholar] [CrossRef]
- Smaoui, N.; Kim, K.; Gnawali, O.; Lee, Y.J.; Suh, W. Respirable dust monitoring in construction sites and visualization in building information modeling using real-time sensor data. Sens. Mater. 2018, 30, 1775–1786. [Google Scholar] [CrossRef] [Green Version]
- Teizer, J.; Venugopal, M.; Walia, A. Ultrawideband for automated real-time three-dimensional location sensing for workforce, equipment, and material positioning and tracking. Transp. Res. Rec. 2008, 56–64. [Google Scholar] [CrossRef]
- Zetik, R.; Shen, G.; Thomä, R.S. Evaluation of requirements for UWB localization systems in home-entertainment applications. In Proceedings of the 2010 International Conference on Indoor Positioning and Indoor Navigation, IPIN 2010–Conference Proceedings; Zurich, Switzerland, 15–17 September 2010. [Google Scholar]
- Monica, S.; Ferrari, G. Accurate indoor localization with UWB wireless sensor networks. In Proceedings of the Workshop on Enabling Technologies: Infrastructure for Collaborative Enterprises, WETICE, Parma, Italy, 23–25 June 2014; pp. 287–289. [Google Scholar]
- Cemin, Z.; Kuhn, M.; Merkl, B.; Fathy, A.E.; Mahfouz, M. Accurate UWB indoor localization system utilizing time difference of arrival approach. In Proceedings of the 2006 IEEE Radio and Wireless Symposium, San Diego, CA, USA, 17–19 January 2006; Volume 2006, pp. 515–518. [Google Scholar]
- Towards location enhanced IoT: Characterization of LoRa signal for wide area localization. Available online: https://ieeexplore.ieee.org/document/8559844 (accessed on 4 January 2021).
- LoRa-based localization systems for noisy outdoor environment. Available online: https://www.medsci.cn/sci/show_paper.asp?id=f67a8115e3c6569a (accessed on 4 January 2021).
- Cheng, C.S.; Chang, H.H.; Chen, Y.T.; Lin, T.H.; Chen, P.C.; Huang, C.M.; Yuan, H.S.; Chu, W.C. Accurate location tracking based on active RFID for health and safety monitoring. In Proceedings of the 3rd International Conference on Bioinformatics and Biomedical Engineering, iCBBE 2009, Beijing, China, 11–13 June 2009. [Google Scholar]
- Xuejing, J.; Ye, L.; Xiaolei, W. An Enhanced Approach of Indoor Location Sensing Using Active RFID. In Proceedings of the 2009 WASE International Conference on Information Engineering, ICIE 2009, Taiyuan, China, 10–11 July 2009; Volume 1, pp. 169–172. [Google Scholar]
- Active RFID-based localization using virtual reference elimination. Available online: https://ieeexplore.ieee.org/document/4343863 (accessed on 4 January 2021).
- Jain, S.; Sabharwal, A.; Chandra, S. An improvised localization scheme using active RFID for accurate tracking in smart homes. In Proceedings of the UKSim2010–UKSim 12th International Conference on Computer Modelling and Simulation, Cambridge, UK, 24–26 March 2010; pp. 51–56. [Google Scholar]
- IoT-based system for indoor location using bluetooth low energy. Available online: https://ieeexplore.ieee.org/document/8088211 (accessed on 4 January 2021).
- Bruno, R.; Delmastro, F. Design and analysis of a Bluetooth-based indoor localization system. Lect. Notes Comput. Sci. 2003, 2775, 711–725. [Google Scholar] [CrossRef] [Green Version]
- de Blas, A.; López-De-Ipiña, D. Improving trilateration for indoors localization using BLE beacons. In Proceedings of the 2017 2nd International Multidisciplinary Conference on Computer and Energy Science, SpliTech 2017, Split, Croatia, 12–14 July 2017. [Google Scholar]
- Baronti, P.; Pillai, P.; Chook, V.W.C.; Chessa, S.; Gotta, A.; Hu, Y.F. Wireless sensor networks: A survey on the state of the art and the 802.15.4 and ZigBee standards. Comput. Commun. 2007, 30, 1655–1695. [Google Scholar] [CrossRef]
- Bianchi, V.; Ciampolini, P.; de Munari, I. RSSI-Based Indoor Localization and Identification for ZigBee Wireless Sensor Networks in Smart Homes. IEEE Trans. Instrum. Meas. 2019, 68, 566–575. [Google Scholar] [CrossRef]
- Sugano, M.; Kawazoe, T.; Ohta, Y.; Murata, M. Indoor localization system using RSSI measurement of wireless sensor network based on ZigBee standard. In Proceedings of the 6th IASTED International Multi-Conference on Wireless and Optical Communications: Wireless Sensor Networks, WSN 2006, Banff, AB, Canada, 3–5 July 2006; pp. 503–508. [Google Scholar]
- Tsang, T.K.K.; El-Gamal, M.N. Ultra-wideband (UWB) communications systems: An overview. In Proceedings of the 3rd International IEEE Northeast Workshop on Circuits and Systems Conference, NEWCAS 2005, Montreal, QC, Canada, 19–22 June 2005; Volume 2005, pp. 381–386. [Google Scholar]
- Ridolfi, M.; van de Velde, S.; Steendam, H.; de Poorter, E. Analysis of the Scalability of UWB Indoor Localization Solutions for High User Densities. Sensors 2018, 18, 1875. [Google Scholar] [CrossRef] [Green Version]
- Guvenc, I.; Chong, C.C.; Watanabe, F. NLOS identification and mitigation for UWB localization systems. In Proceedings of the IEEE Wireless Communications and Networking Conference, WCNC, Hong Kong, China, 11–15 March 2007; pp. 1573–1578. [Google Scholar]
- Timmermann, D. Weighted centroid localization in Zigbee-based sensor networks. Available online: https://ieeexplore.ieee.org/document/4447528 (accessed on 4 January 2021).
- Zampella, F.; Jiménez, R.A.R.; Seco, F. Robust indoor positioning fusing PDR and RF technologies: The RFID and UWB case. Available online: https://ieeexplore.ieee.org/document/6817857 (accessed on 4 January 2020).
- An introduction to Sigfox and LoRa PHY and MAC layers to cite this version. Available online: https://hal.archives-ouvertes.fr/hal-01774080/document (accessed on 4 January 2021).
- Sinha, R.S.; Wei, Y.; Hwang, S.H. A survey on LPWA technology: LoRa and NB-IoT. ICT Express 2017, 3, 14–21. [Google Scholar] [CrossRef]
- Choi, W.; Chang, Y.S.; Jung, Y.; Song, J. Low-power LORa signal-based outdoor positioning using fingerprint algorithm. ISPRS Int. J. Geo-Inf. 2018, 7, 440. [Google Scholar] [CrossRef] [Green Version]
- Electromagnetic Signal Attenuation in Construction Materials. Available online: https://nvlpubs.nist.gov/nistpubs/Legacy/IR/nistir6055.pdf (accessed on 4 January 2021).
- Xu, W.; Kim, J.Y.; Huang, W.; Kanhere, S.S.; Jha, S.K.; Hu, W. Measurement, Characterization, and Modeling of LoRa Technology in Multifloor Buildings. IEEE Internet Things J. 2020, 7, 298–310. [Google Scholar] [CrossRef] [Green Version]
- Manzoni, P.; Calafate, C.T.; Cano, J.C.; Hernández-Orallo, E. Indoor vehicles geolocalization using LoRaWAN. Future Internet 2019, 11, 124. [Google Scholar] [CrossRef] [Green Version]
- Sadowski, S.; Spachos, P. RSSI-Based Indoor Localization with the Internet of Things. IEEE Access 2018, 6, 30149–30161. [Google Scholar] [CrossRef]
- Gu, C.; Jiang, L.; Tan, R. LoRa-based localization: Opportunities and challenges. arXiv 2018, arXiv:1812.11481. [Google Scholar]
- Gezici, S.; Tian, Z.; Giannakis, G.B.; Kobayashi, H.; Molisch, A.F.; Poor, H.V.; Sahinoglu, Z. Localization via ultra-wideband radios: A look at positioning aspects of future sensor networks. IEEE Signal Process. Mag. 2005, 22, 70–84. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technology | Applications | Pros | Cons |
|---|---|---|---|
| Passive RFID | Working location tracking [30] Material tracking [31,32] Mobile robot’s self-localization [33] Activity recognition and assistance [14] | Cheap tags High energy efficiency | Short reception range Low accuracy Need a great amount of tags or antennas |
| Active RFID | Material tracking [17] Robot interaction with smart objects [34] User position tracking [16] Misplaced object positioning [35] | Longer reception range | Expensive tags Low accuracy Lower portability |
| BLE | Worker location tracking [36] Worker-equipment proximity detection [37] Residential activity labelling [38] Indoor localization in the smart home [39,40] | Long reception range Low energy consumption High acceptance Low cost of infrastructure | High susceptibility of other signals High packet-drop rate |
| UWB | Worker location tracking [41,42] Equipment tracking [43] User location-based adjustment of home-entertainment applications [44] Accurate indoor localization [45] | High accuracy of localizationImmune to interferenceHigh energy efficient | Short reception range High cost of infrastructure |
| LoRa | Outdoor localization [33,46,47] Not applied in construction | Long reception range Low cost High energy efficiency Penetration | Unexplored |
| Anchor 1 Ranging Error (m) | Anchor 2 Ranging Error (m) | Anchor 3 Ranging Error (m) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Avg | Std | 50th | 99th | Avg | Std | 50th | 99th | Avg | Std | 50th | 99th | |
| Tag 1 | 0.31 | 0.17 | 0.29 | 0.65 | 2.27 | 0.61 | 2.28 | 3.54 | 1.39 | 0.38 | 1.36 | 2.25 |
| Tag 2 | 0.90 | 0.32 | 0.89 | 1.63 | 2.56 | 0.28 | 2.54 | 3.86 | 3.79 | 0.88 | 4.05 | 5.03 |
| Tag 3 | 0.85 | 0.24 | 0.85 | 1.40 | 1.79 | 0.23 | 1.77 | 2.42 | 0.64 | 0.38 | 0.64 | 1.51 |
| Tag 4 | 0.44 | 0.20 | 0.43 | 0.86 | 0.42 | 0.19 | 0.40 | 0.84 | 0.72 | 0.42 | 0.74 | 1.65 |
| Tag 5 | 1.49 | 0.90 | 1.49 | 3.39 | 0.40 | 0.23 | 0.38 | 1.00 | 0.50 | 0.27 | 0.48 | 1.17 |
| Avg | Std | 50th | 75th | 90th | 99th | |
|---|---|---|---|---|---|---|
| Tag 1 | 2.75 | 0.21 | 2.75 | 2.90 | 3.01 | 3.19 |
| Tag 2 | 2.43 | 0.10 | 2.43 | 2.50 | 2.57 | 2.66 |
| Tag 3 | 1.86 | 0.10 | 1.85 | 1.93 | 1.99 | 2.10 |
| Tag 4 | 1.06 | 0.22 | 1.08 | 1.23 | 1.36 | 1.58 |
| Tag 5 | 1.08 | 0.25 | 1.09 | 1.26 | 1.40 | 1.59 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, K.; Li, S.; Heydariaan, M.; Smaoui, N.; Gnawali, O.; Suh, W.; Suh, M.J.; Kim, J.I. Feasibility of LoRa for Smart Home Indoor Localization. Appl. Sci. 2021, 11, 415. https://doi.org/10.3390/app11010415
Kim K, Li S, Heydariaan M, Smaoui N, Gnawali O, Suh W, Suh MJ, Kim JI. Feasibility of LoRa for Smart Home Indoor Localization. Applied Sciences. 2021; 11(1):415. https://doi.org/10.3390/app11010415
Chicago/Turabian StyleKim, Kyungki, Sining Li, Milad Heydariaan, Nour Smaoui, Omprakash Gnawali, Wonho Suh, Min Jae Suh, and Jung In Kim. 2021. "Feasibility of LoRa for Smart Home Indoor Localization" Applied Sciences 11, no. 1: 415. https://doi.org/10.3390/app11010415
APA StyleKim, K., Li, S., Heydariaan, M., Smaoui, N., Gnawali, O., Suh, W., Suh, M. J., & Kim, J. I. (2021). Feasibility of LoRa for Smart Home Indoor Localization. Applied Sciences, 11(1), 415. https://doi.org/10.3390/app11010415