
Linear Parameter-Varying Model Predictive Control of AUV for Docking Scenarios

Abstract
:1. Introduction
2. AUV Model
2.1. AUV Rigid-Body Model
2.2. Actuators
2.3. Sensors
2.4. Tidal Current Dynamics
3. AUV Control System
3.1. Control System Architecture
3.2. AUV Linear Parameter-Varying Model
3.3. Linear Parameter-Varying Model Predictive Control
3.4. Thrust Allocation
3.5. Kalman Filter
4. Simulation Result
4.1. No Current Test
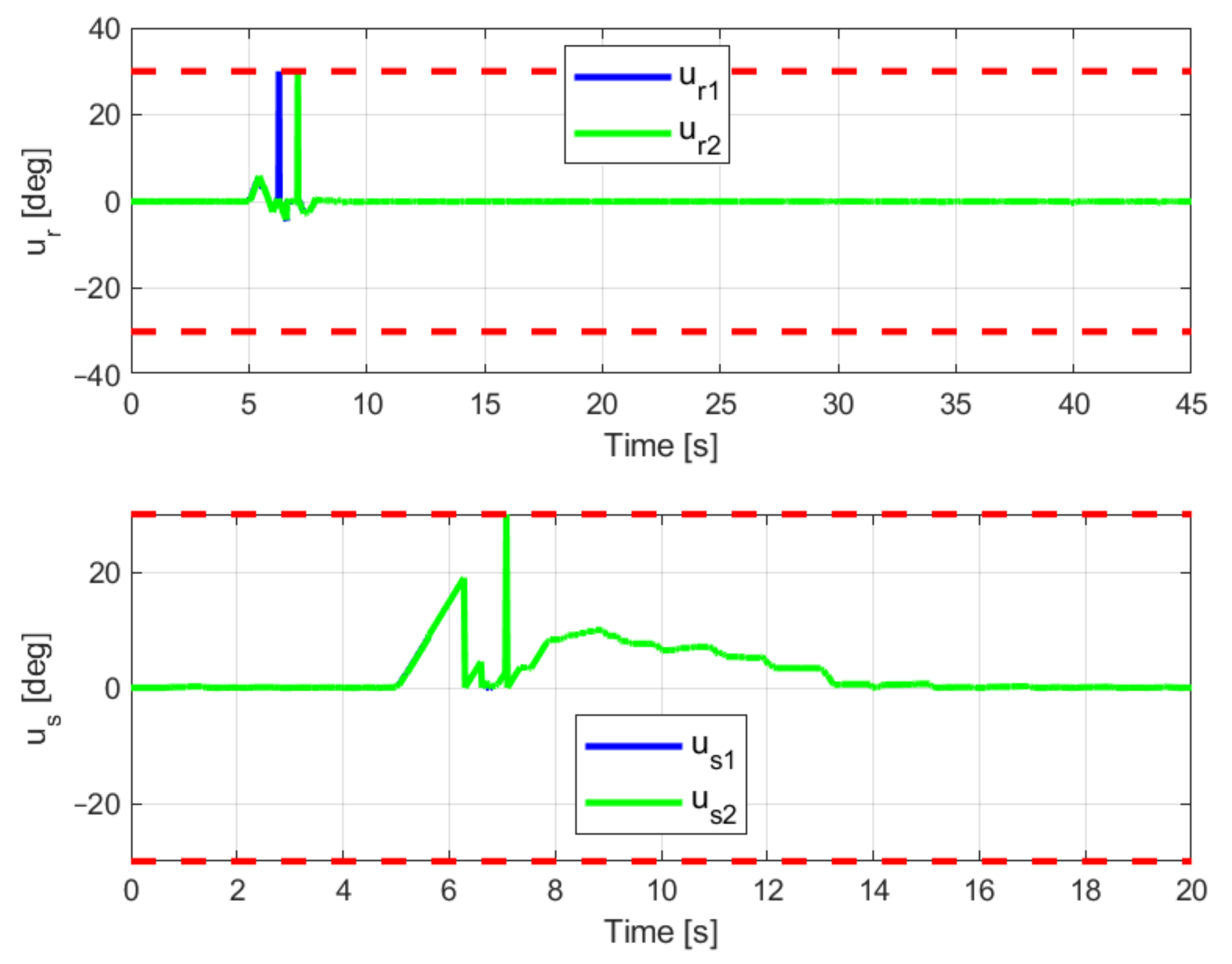
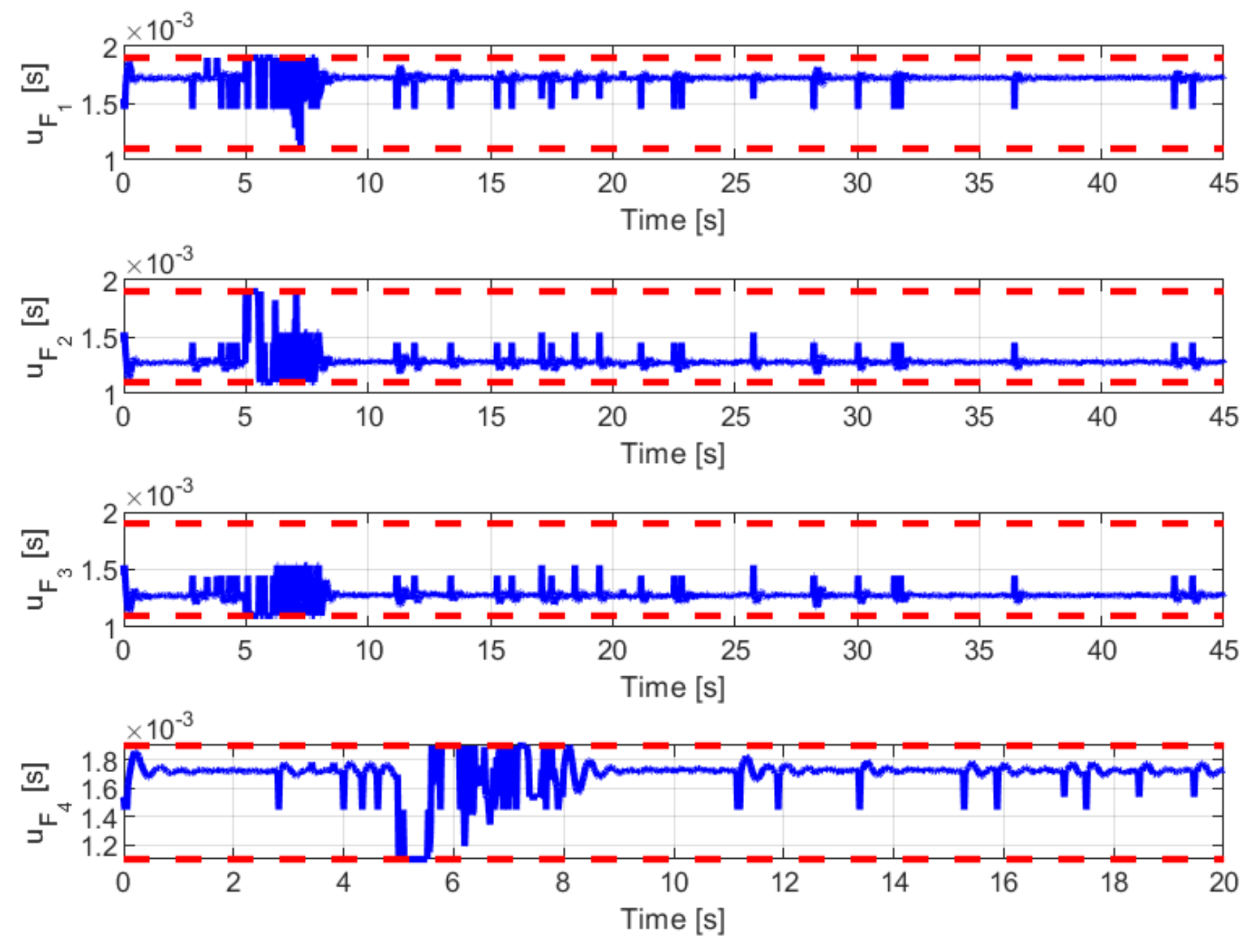
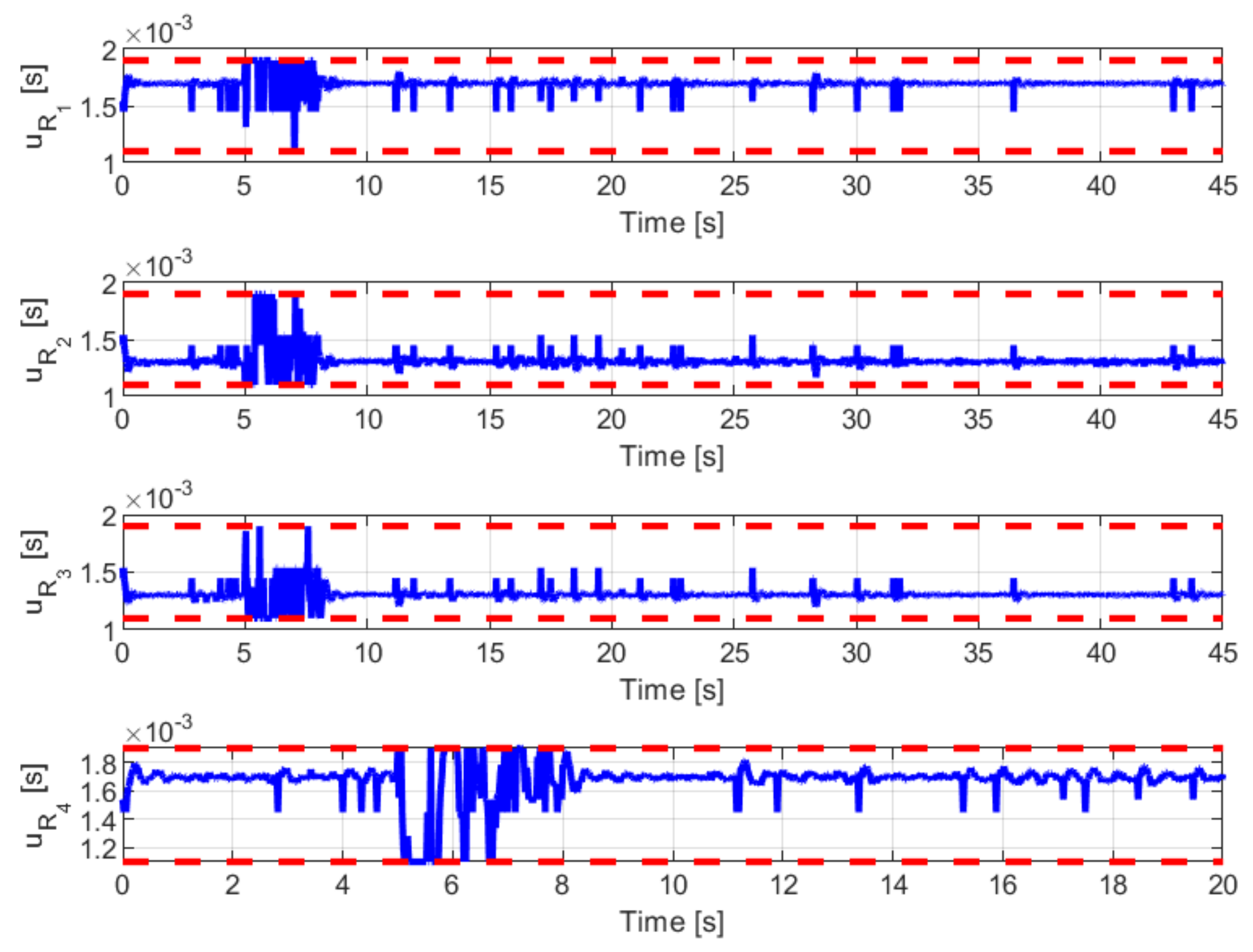
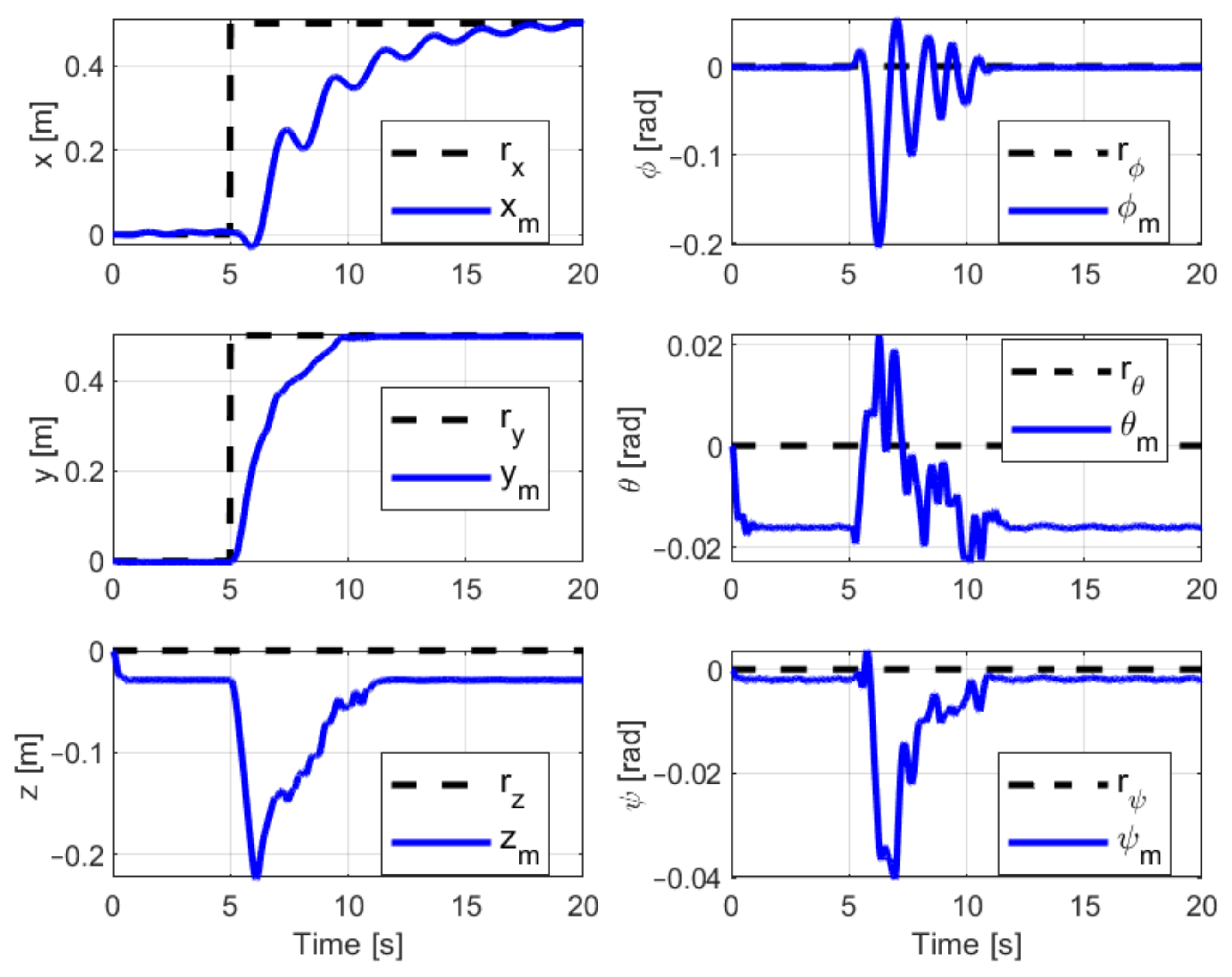
4.2. Max Current Test
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
Rigid-Body Dynamics Model
- If then , and ;
- If then , and ;
- If then , and .
Appendix B

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| AUV Model Parameters | |||
|---|---|---|---|
| Parameter | Symbol | Value | Unit |
| Hull diameter | 0.324 | ||
| Vehicle total length | 3.000 | ||
| Vehicle buoyancy | 1999 | ||
| Vehicle weight | 1940 | ||
| Centre of buoyancy (CB) | ) | (−1.378,0,0) | |
| Moments of inertia, to CB | () | (5.8,114,114) | |
| AUV Hydrodynamic Damping Coefficients | |||
|---|---|---|---|
| Parameter | Symbol | Value | Unit |
| AUV axial drag | −12.7 | ||
| Crossflow drag coeff. | −574 | ||
| Crossflow drag coeff. | −574 | ||
| Crossflow drag coeff. | 12.3 | ||
| Crossflow drag coeff. | 12.3 | ||
| Crossflow drag coeff. | 27.4 | ||
| Crossflow drag coeff. | −4127 | ||
| Crossflow drag coeff. | −27.4 | ||
| Crossflow drag coeff. | −4127 | ||
| Rolling resistance coeff. | −0.63 | ||
| Seawater density | 1024 | ||
| Gravity acceleration | 9.8 | ||
| AUV Added Mass Coefficients | |||
|---|---|---|---|
| Parameter | Symbol | Value | Unit |
| Added mass coeff. | −6 | ||
| Added mass coeff. | −230 | ||
| Added mass coeff. | −230 | ||
| Added mass coeff. | −1.31 | ||
| Added mass coeff. | −161 | ||
| Added mass coeff. | −161 | ||
| Added mass coeff. | 28.3 | ||
| Added mass coeff. | −28.3 | ||
| Added mass coeff. | −28.3 | ||
| Added mass coeff. | 28.3 | ||
| Added mass coeff. | −6 | ||
| Added mass coeff. | −230 | ||
| AUV Body Lift Coefficients | |||
|---|---|---|---|
| Parameter | Symbol | Value | Unit |
| Body lift moment coeff. | −82.3 | ||
| Body lift moment coeff. | −82.3 | ||
| Body lift force coeff. | −29 | ||
| Body lift force coeff. | 29 | ||
| AUV Fin Lift Coefficients | |||
|---|---|---|---|
| Parameter | Symbol | Value | Unit |
| Fin lift coeff. | 27.7 | ||
| Fin lift coeff. | −27.7 | ||
| Fin lift coeff. | −39.9 | ||
| Fin lift coeff. | −39.9 | ||
| Fin lift coeff. | −27.7 | ||
| Fin lift coeff. | −27.7 | ||
| Fin lift coeff. | 17.7 | ||
| Fin lift coeff. | −17.7 | ||
| Fin lift coeff. | −39.9 | ||
| Fin lift coeff. | 39.9 | ||
| Fin lift coeff. | 9.41 | ||
| Fin lift coeff. | 9.41 | ||
References
- Encarnacao, P.; Pascoal, A. 3D Path Following for Autonomous Underwater Vehicle. In Proceedings of the 39th IEEE Conference on Decision and Control, Sydney, Australia, 12–15 December 2000. [Google Scholar]
- Wei, Y.; Zhu, D.; Chu, Z. Underwater Dynamic Target Tracking of Autonomous Underwater Vehicle Based on MPC Algorithm. In Proceedings of the 2018 IEEE 8th International Conference on Underwater System Technology: Theory and Applications (USYS), Wuhan, China, 1–3 December 2018. [Google Scholar]
- Qiao, L.; Zhang, W. Fast Trajectory Tracking Control of Underactuated Autonomous Underwater Vehicles. In Proceedings of the 2018 IEEE 8th International Conference on Underwater System Technology: Theory and Applications (USYS), Wuhan, China, 1–3 December 2018. [Google Scholar]
- Uchihori, H.; Yamamoto, I.; Morinaga, A. Autonomous Underwater Vehicle Docking Concept Using 3D Imaging Sonar. Sens. Mater. 2019, 31, 4223–4230. [Google Scholar] [CrossRef]
- Chu, Z.; Zhu, D. Adaptive sliding mode heading control for autonomous underwater vehicle including actuator dynamics. In Proceedings of the OCEANS 2016, Shanghai, China, 19–22 September 2016. [Google Scholar]
- Gao, z.; Guo, g. Adaptive formation control of autonomous underwater vehicles with model uncertainties. Int J Adapt Control Signal Process. 2018, 32, 1067–1080. [Google Scholar] [CrossRef]
- Naeem, W.; Sutton, R.; Almad, M. Pure Pursuit Guidance and Model Predictive Control of an Autonomous Underwater Vehicle for Cable/Pipeline Tracking. In Proceedings of the Institute of Marine Engineering Science and Technology Part C Journal of Marine Science and Environment, San Francisco, CA, USA, 1 October 2003. [Google Scholar]
- Shen, C.; Shi, Y. Distributed implementation of nonlinear model predictive control for AUV trajectory tracking. Automatica 2020, 115, 108863. [Google Scholar] [CrossRef]
- Cavanini, L.; Ippoliti, G. Fault tolerant model predictive control for an over-actuated vessel. Ocean Eng. 2018, 160, 1–9. [Google Scholar] [CrossRef]
- Cavanini, L.; Cimini, G.; Ippoliti, G. Computationally efficient model predictive control for a class of linear parameter-varying systems. IET Control Theory Appl. 2018, 12, 1384–1392. [Google Scholar] [CrossRef]
- Cavanini, L.; Cimini, G.; Ippoliti, G. A fast model predictive control algorithm for linear parameter varying systems with right invertible input matrix. In Proceedings of the 2017 25th Mediterranean Conference on Control and Automation (MED), Valletta, Malta, 3–6 July 2017; pp. 42–47. [Google Scholar]
- Cavanini, L.; Cimini, G.; Ippoliti, G.; Bemporad, A. Model predictive control for pre-compensated voltage mode controlled DC–DC converters. IET Control Theory Appl. 2017, 11, 2514–2520. [Google Scholar] [CrossRef] [Green Version]
- Cha, S.H.; Rotkowitz, M.; Anderson, B.D. Gain Scheduling using Time-varying Kalman Filter for a class of LPV Systems. IFAC Proc. Vol. 2008, 41, 4934–4939. [Google Scholar]
- Antonelli, G.; Fossen, T.I.; Yoerger, D.R. Modeling and control of underwater robots. In Springer Handbook of Robotics; Springer: Cham, Switzerland, 2006. [Google Scholar] [CrossRef]
- Prestero, T. Verification of a Six-Degree of Freedom Simulation Model for the REMUS Autonomous Underwater Vehicle. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2001. [Google Scholar]
- Grimble, M.J.; Majecki, P. Nonlinear Industrial Control Systems: Optimal Polynomial Systems and State-Space Approach; Springer: London, UK, 2020; ISBN 978-1-4471-7455-4. [Google Scholar]













| AUV Control System Tuning Parameters | ||
|---|---|---|
| Parameter | Symbol | Value |
| Prediction horizon | ||
| Control horizon | ||
| Control rate weights | ||
| Controlled output weights | ||
| Terminal weights | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Uchihori, H.; Cavanini, L.; Tasaki, M.; Majecki, P.; Yashiro, Y.; Grimble, M.J.; Yamamoto, I.; van der Molen, G.M.; Morinaga, A.; Eguchi, K. Linear Parameter-Varying Model Predictive Control of AUV for Docking Scenarios. Appl. Sci. 2021, 11, 4368. https://doi.org/10.3390/app11104368
Uchihori H, Cavanini L, Tasaki M, Majecki P, Yashiro Y, Grimble MJ, Yamamoto I, van der Molen GM, Morinaga A, Eguchi K. Linear Parameter-Varying Model Predictive Control of AUV for Docking Scenarios. Applied Sciences. 2021; 11(10):4368. https://doi.org/10.3390/app11104368
Chicago/Turabian StyleUchihori, Hiroshi, Luca Cavanini, Mitsuhiko Tasaki, Pawel Majecki, Yusuke Yashiro, Michael J. Grimble, Ikuo Yamamoto, Gerrit M. van der Molen, Akihiro Morinaga, and Kazuki Eguchi. 2021. "Linear Parameter-Varying Model Predictive Control of AUV for Docking Scenarios" Applied Sciences 11, no. 10: 4368. https://doi.org/10.3390/app11104368
APA StyleUchihori, H., Cavanini, L., Tasaki, M., Majecki, P., Yashiro, Y., Grimble, M. J., Yamamoto, I., van der Molen, G. M., Morinaga, A., & Eguchi, K. (2021). Linear Parameter-Varying Model Predictive Control of AUV for Docking Scenarios. Applied Sciences, 11(10), 4368. https://doi.org/10.3390/app11104368