
Dynamic Test Measurements and Simulation on a Series Wound DC Motor


Abstract
:1. Introduction
2. Modelling and Simulation of the SWDCM
3. Measurements
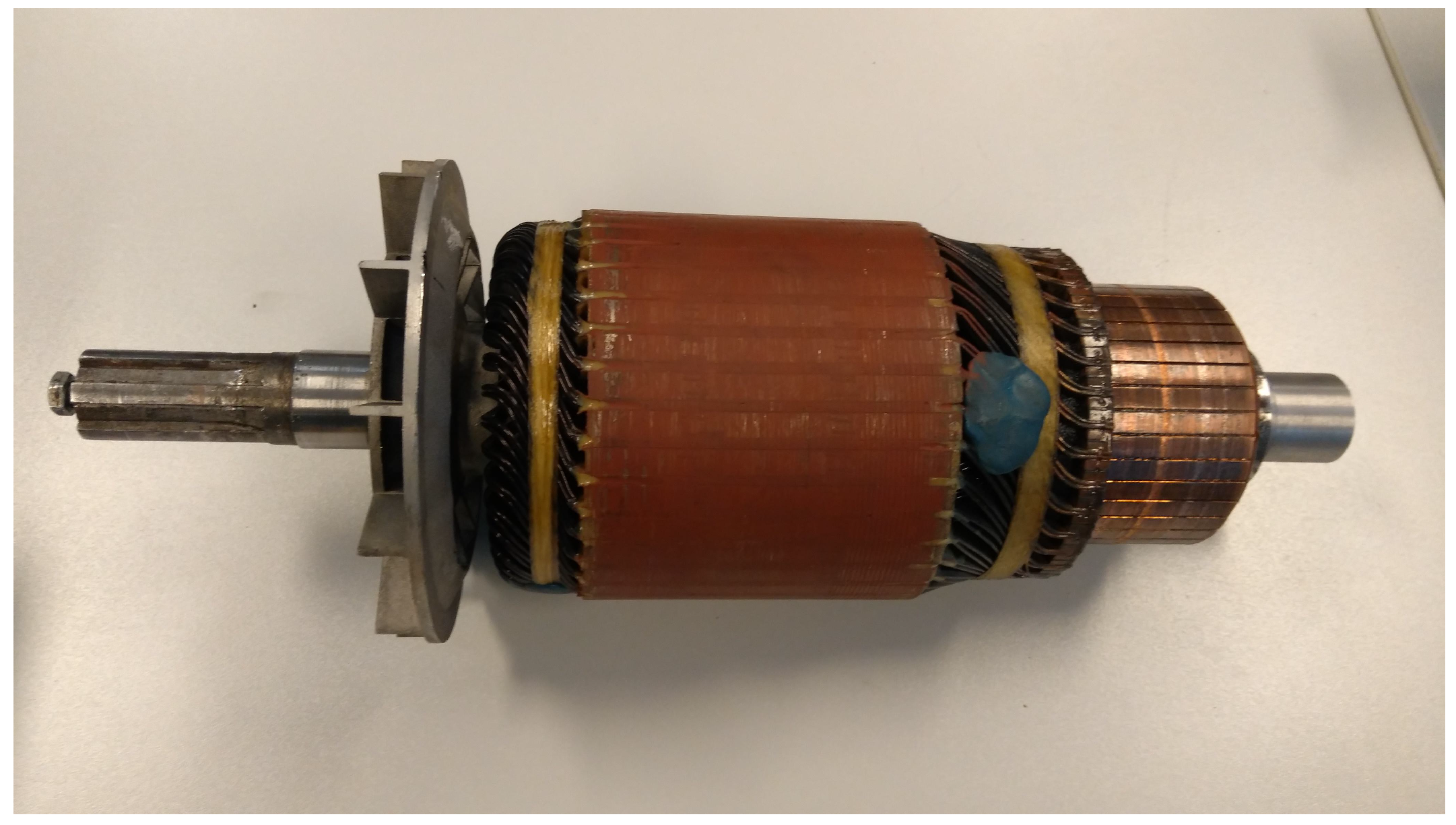
3.1. The Experimental Set-Up
3.2. Dynamic Test Measurements
3.2.1. Determination of Dynamic Input Parameters
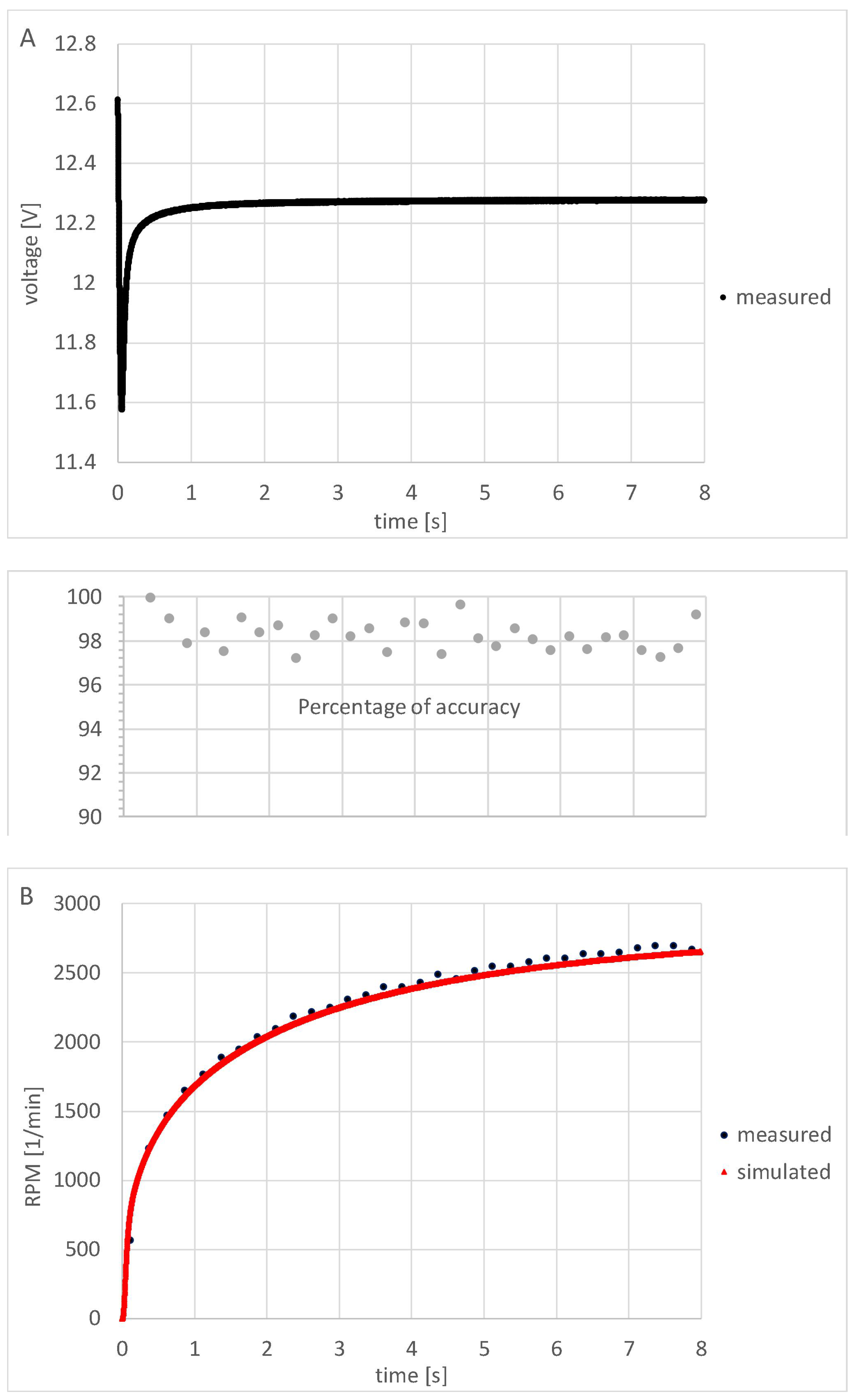
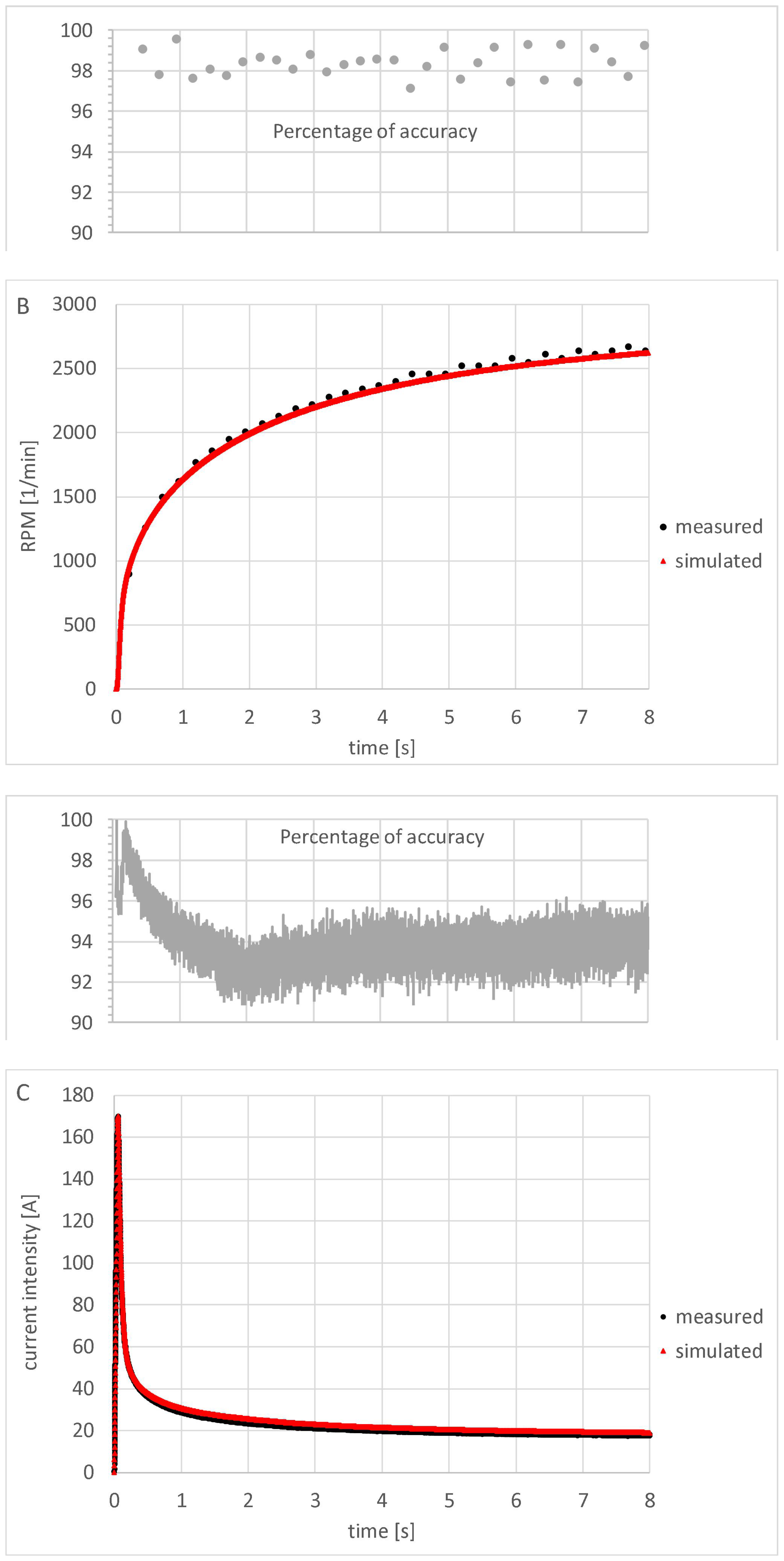
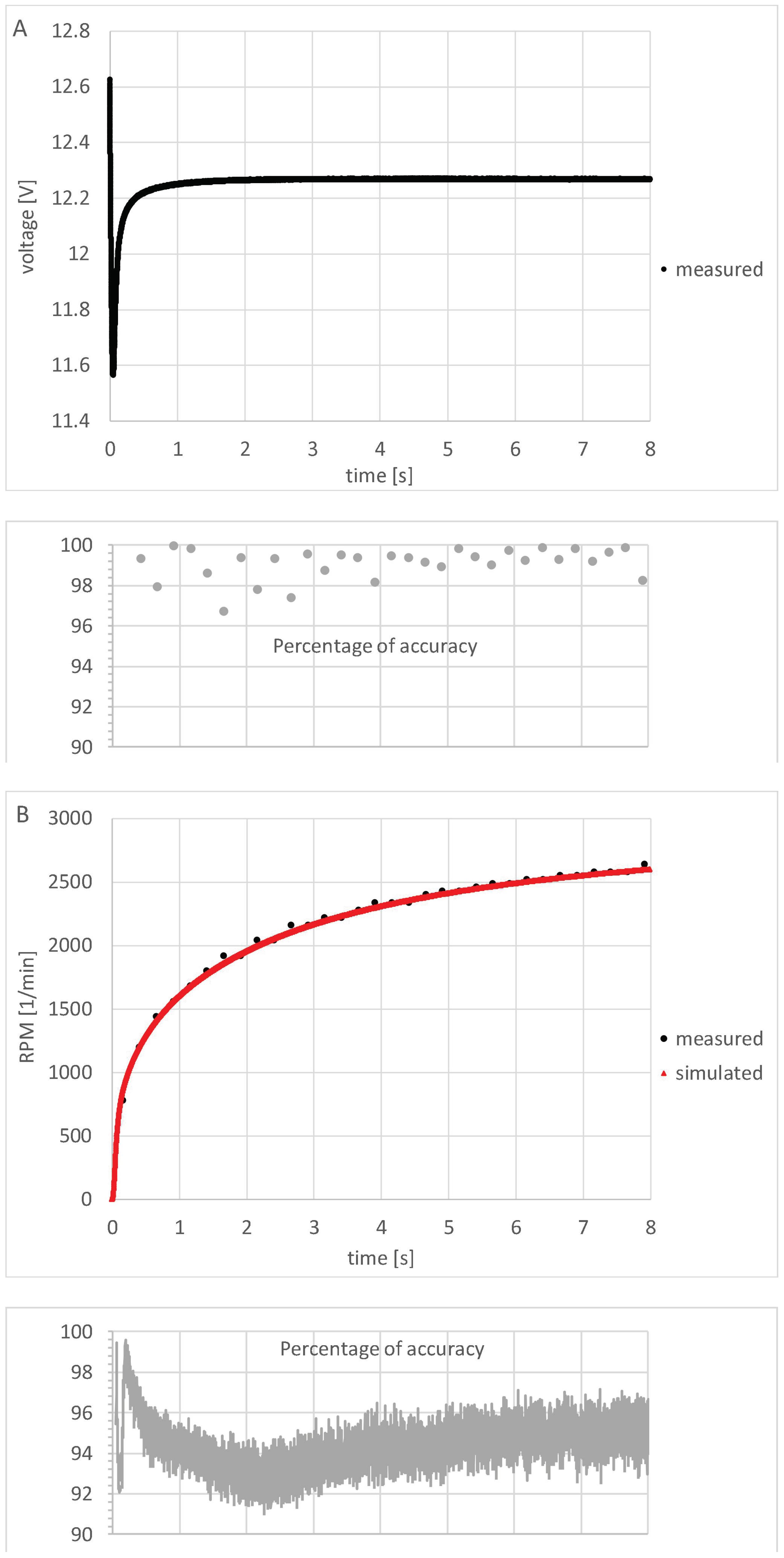
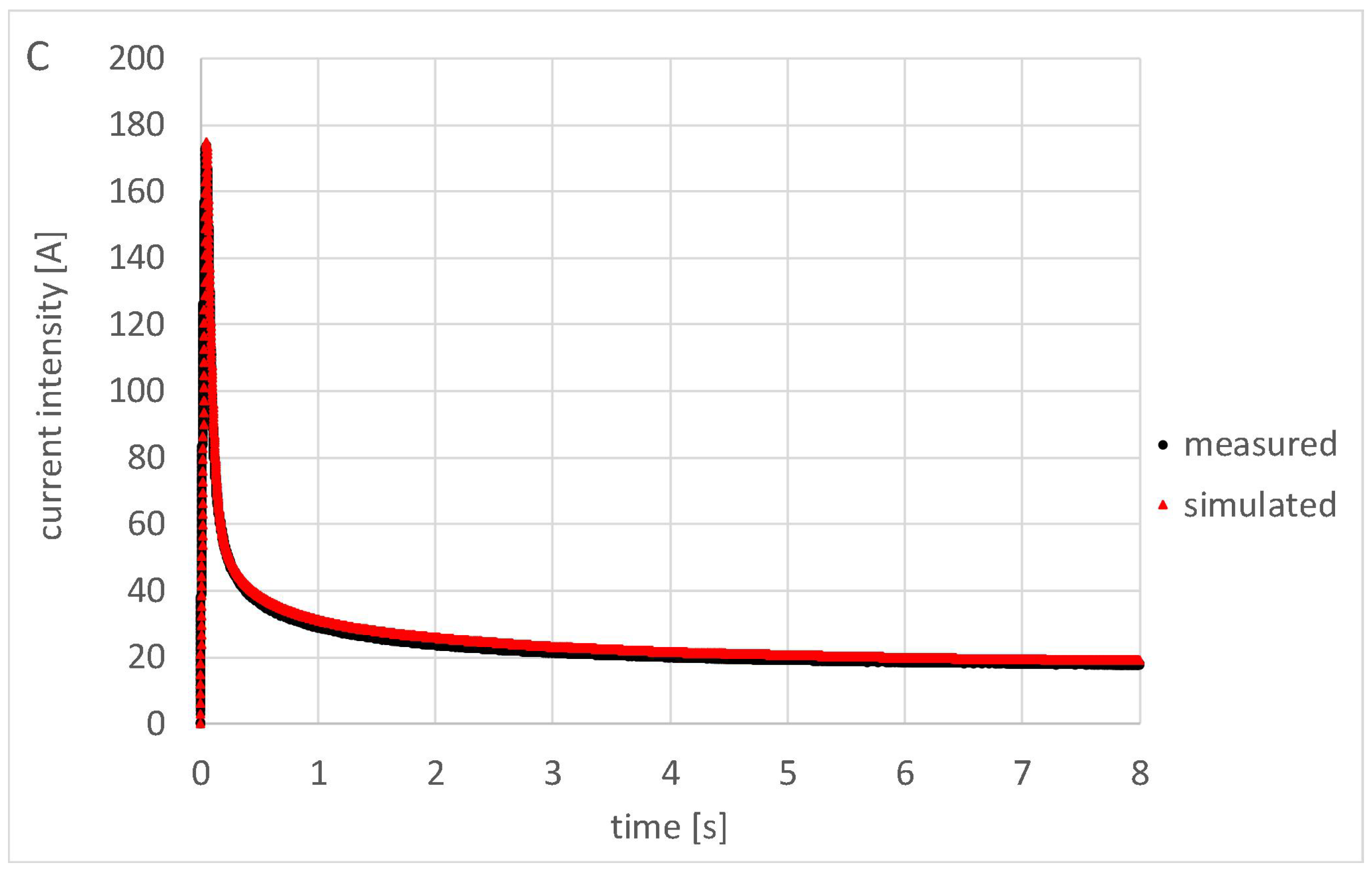
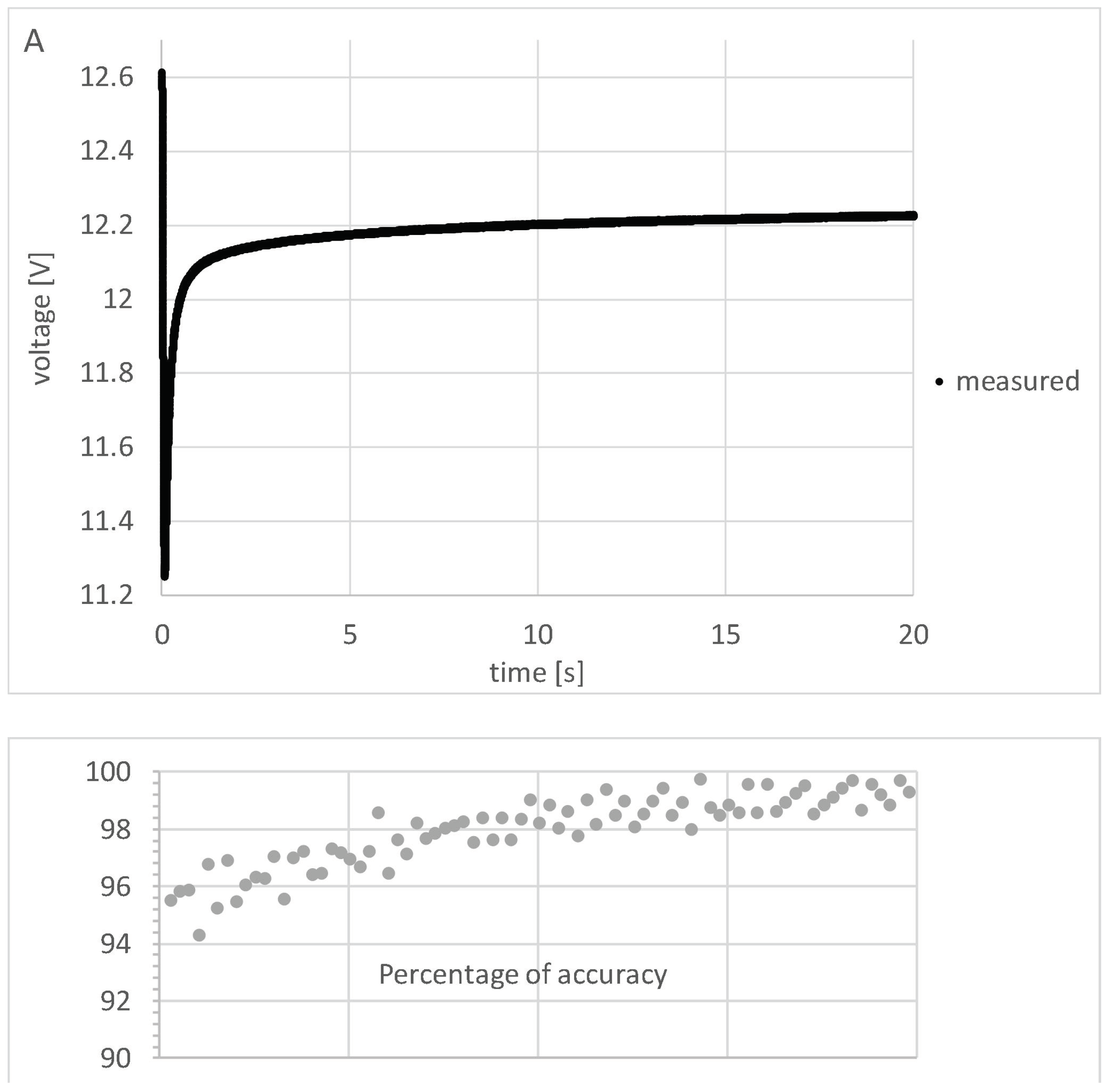
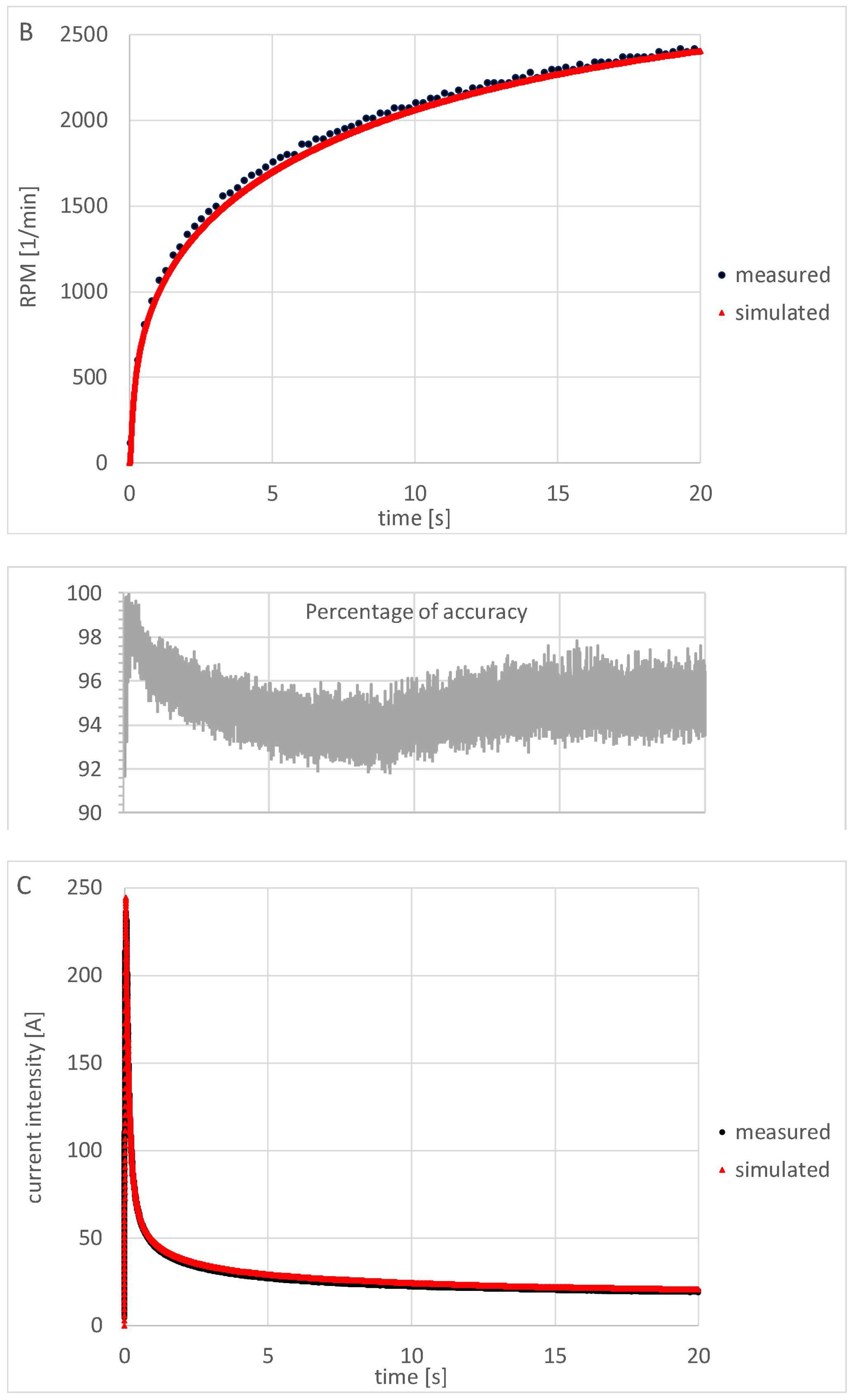
3.2.2. Comparison of Measured and Simulated Results
4. Summary
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| Abbreviation | Meaning |
| AC | alternating current |
| BLDCM | brushless DC motor |
| DC | direct current |
| e.g., | for example |
| MVM | Hungarian Electrical Works Ltd. |
| NI | national instruments |
| PC | personal computer |
| RPM | revolutions per minute |
| SWDCM | series wound DC motor |
| IM | induction motor |
| SM | synchronous motor |
| SRM | switched reluctance motor |
Nomenclature
| Symbol | Definition | SI unit |
| α | incline angle | [°] |
| angular deceleration | [rad/s2] | |
| I | current | ampere [A] |
| Jload | moment of inertia of the mechanical loading | [kg·m2] |
| Jr | moment of inertia of the rotor | [kg·m2] |
| k | arm of rolling friction | [m] |
| Lr | self dynamic inductance of the rotor winding | henry [H] |
| Ls | self dynamic inductance of the stator winding | henry [H] |
| Lsr | mutual dynamic inductance | henry [H] |
| m | mass of the rotor | [kg] |
| Mload | loading torque on the rotor of the motor | newton [N] |
| Mres | bearing plus brush friction torque on the rotor of the motor | newton [N] |
| ω | angular velocity | radian per second [rad/s] |
| r | rolling radius | [m] |
| Rbatt | internal resistance of the battery | ohm [Ω] |
| Rr | electric resistance of the rotor winding | ohm [Ω] |
| Rs | electric resistance of the stator winding | ohm [Ω] |
| Rshunt | resistance of the shunt resistor | ohm [Ω] |
| Rwire | resultant resistance of the wires connecting the motor to the battery | ohm [Ω] |
| s | covered distance by the centre of mass of the rotor | [m] |
| t | time of rolling | [s] |
| Ubatt | electromotive force of the battery | volt [V] |
| Ubrush | voltage drop on the carbon brushes | volt [V] |
References
- Szántó, A.; Szíki, G.Á. Review of Modern Vehicle Powertrains and Their Modelling and Simulation in MATLAB/Simulink. Int. J. Eng. Manag. Sci. 2020, 5, 232–250. [Google Scholar] [CrossRef]
- Singh, K.V.; Bansal, H.O.; Singh, D. A comprehensive review on hybrid electric vehicles: Architectures and components. J. Mod. Transport. 2019, 27, 77–107. [Google Scholar] [CrossRef] [Green Version]
- Lulhe, A.M.; Date, T.N. A Technology Review Paper for Drives used in Electrical Vehicle (EV) & Hybrid Electrical Vehicles (HEV). In Proceedings of the 2015 International Conference on Control, Instrumentation, Communication and Computational Technologies (ICCICCT), Kumaracoil, India, 18–19 December 2015. [Google Scholar]
- Szíki, G.Á.; Juhász, G.; Nagyné Kondor, R.; Juhász, B. Determination and Solution of the Motion of Equation of a Pneumatic Drive Vehicle. In Proceedings of the 1st Agria Conference on Innovative Pneumatic Vehicles–ACIPV 2017 Budapest, Eger, Hungary, 5 May 2017; pp. 55–58. [Google Scholar]
- Szántó, A.; Szíki, G.Á.; Hajdu, S. Dynamics simulation of a prototype race car driven by series wound DC motor in Matlab-Simulink. Acta Polytech. Hung. 2020, 17, 103–122. [Google Scholar] [CrossRef]
- Szíki, G.Á.; Szántó, A.; Mankovits, T. Dynamic modelling and simulation of a prototype race car in MATLAB/Simulink applying different types of electric motors. Int. Rev. Appl. Sci. Eng. 2020, 12, 57–63. [Google Scholar]
- András, G.; Attila, M.; Lajos, M.; József, V.K.; Dániel, N.; Dávid, B.; Péter, P.H.; Balázs, S.K.; Attila, S.; Áron, S.G.; et al. Prototype and urban concept battery electric car development for Shell ECO-Marathon competition. In Proceedings of the 26th International Conference on Mechanical Engineering (OGÉT), Marosvásárhely, Romania, 26–29 April 2018; Volume 544, pp. 139–142. [Google Scholar]
- Juhász, G. Technical competitions for the education. In Proceedings of the 1st International Scientific Conference on Advances in Mechanical Engineering (ISCAME), Debrecen, Hungary, 10–11 October 2013; Volume 229, pp. 74–78. [Google Scholar]
- Attila, S.; Áron, S.G.; Sándor, H.; András, G.; Balázs, S.K. Vehicle dynamics simulation and optimization. Pap. Tech. Sci. 2018, 9, 219–222. [Google Scholar]
- Salem, F.A. Dynamic Modeling, Simulation and Control of Electric Machines for Mechatronics Applications. Int. J. Control Autom. Syst. 2013, 1, 30–42. [Google Scholar]
- Sziki, G.Á.; Sarvajcz, K.; Kiss, J.; Gál, T.; Szántó, A.; Gábora, A.; Husi, G. Experimental investigation of a series wound dc motor for modeling purpose in electric vehicles and mechatronics systems. Measurement 2017, 109, 111–118. [Google Scholar]
- Szántó, A.; Szántó, A.; Sziki G, Á. Review of the modelling methods of series wound DC motors. Műszaki Tudományos Közlemények 2020, 13, 166–169. [Google Scholar]
- Záskalický, P. Modelling of a serial wound DC motor supplied by a semi controlled rectifier. Adv. Electr. Electron. Eng. 2006, 5, 110–113. [Google Scholar]
- Bitara, Z.; Al Jabia, S.; Khamisb, I. Modeling and Simulation of Series DC Motors in Electric Car. Energy Procedia 2014, 50, 460–470. [Google Scholar] [CrossRef] [Green Version]
- Barna, G. Simulation Model of a Series DC Motor for Traction Rail Vehicles; IEEE: Piscataway, NJ, USA, 2016; ISBN 978-1-5090-1866-6. [Google Scholar]
- Hadžiselimović, M.; Blaznik, M.; Štumberger, B.; Zagradišnik, I. Magnetically Nonlinear Dynamic Model of a Series Wound DC Motor. Prz. Elektrotechniczny 2011, 87, 60–64. [Google Scholar]
- Áron, S.G.; Kornél, S.; Attila, S.; Tamás, M. Series Wound DC Motor Simulation Applying Matlab Simulink and Labview Control Design and Simulation Module. Period. Polytech. Transp. Eng. 2020, 48, 65–69. [Google Scholar]
- Kaššay, P.; Grega, R. Measuring Mass Moment of Inertia of a Rotor—Two Simple Methods Using No Special Equipment. Current Methods of Construction Design; Lecture Notes in Mechanical Engineering; Springer: Cham, Switzerland, 2020; pp. 303–315. [Google Scholar] [CrossRef]
- Egorov, A.V.; Kozlov, K.; Belogusev, V. Experimental identification of the electric motor moment of inertia and its efficiency using the additional inertia. ARPN J. Eng. Appl. Sci. 2016, 11, 10582. [Google Scholar]
- Rahul, A.; Lekurwale, S.G. Tarnekar: Determination of Moment of Inertia of Electrical Machines Using MATLAB. Int. J. Eng. Res. Technol. 2012, 1. [Google Scholar]
- Sands, T. Control of DC Motors to Guide Unmanned Underwater Vehicles. Appl. Sci. 2021, 11, 2144. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Load | ||
|---|---|---|
| Disc 1 | 0.0001576 | 30.331 |
| Disc 2 | 0.0018561 | 27.273 |
| Disc 3 | 0.0035496 | 25.516 |
| Disc 4 | 0.06785 | 6.5519 |
| Load Pairs | ||
|---|---|---|
| Disc 1–Disc 4 | 0.01822 | 0.5574 |
| Disc 2–Disc 4 | 0.01867 | 0.5603 |
| Disc 3–Disc 4 | 0.0183 | 0.5575 |
[kg] | [m] | [°] | [°] |
| 12.350 ± 0.001 | 0.015 | 1.063 ± 0.0032 | 1.539 ± 0.0046 |
[kg·m2] | |||
| 0.0215 ± 0.0001 | 0.0315 ± 0.0002 | 0.01987 ± 0.0006 |
| Load | |
|---|---|
| Disc 1 | 0.6075 |
| Disc 2 | 0.5925 |
| Disc 3 | 0.5976 |
| Disc 4 | 0.5747 |
[kg] | [m] | [°] | [°] |
| 2.304 ± 0.001 | 0.025 | 0.4797 ± 0.0014 | 1.2021 ± 0.0036 |
[kg·m2] | [kg·m2] | ||
| 0.0485 ± 0.0003 | 0.1316 ± 0.0007 | 0.000702 ± 0.000023 | 0.00072 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Szántó, A.; Kiss, J.; Mankovits, T.; Szíki, G.Á. Dynamic Test Measurements and Simulation on a Series Wound DC Motor. Appl. Sci. 2021, 11, 4542. https://doi.org/10.3390/app11104542
Szántó A, Kiss J, Mankovits T, Szíki GÁ. Dynamic Test Measurements and Simulation on a Series Wound DC Motor. Applied Sciences. 2021; 11(10):4542. https://doi.org/10.3390/app11104542
Chicago/Turabian StyleSzántó, Attila, János Kiss, Tamás Mankovits, and Gusztáv Áron Szíki. 2021. "Dynamic Test Measurements and Simulation on a Series Wound DC Motor" Applied Sciences 11, no. 10: 4542. https://doi.org/10.3390/app11104542
APA StyleSzántó, A., Kiss, J., Mankovits, T., & Szíki, G. Á. (2021). Dynamic Test Measurements and Simulation on a Series Wound DC Motor. Applied Sciences, 11(10), 4542. https://doi.org/10.3390/app11104542