
Central Non-Linear Model-Based Predictive Vehicle Dynamics Control



Abstract
:Featured Application
Abstract
1. Introduction
2. Simulation Framework
3. Central Predictive Control
3.1. Prediction
3.1.1. Roll Behavior
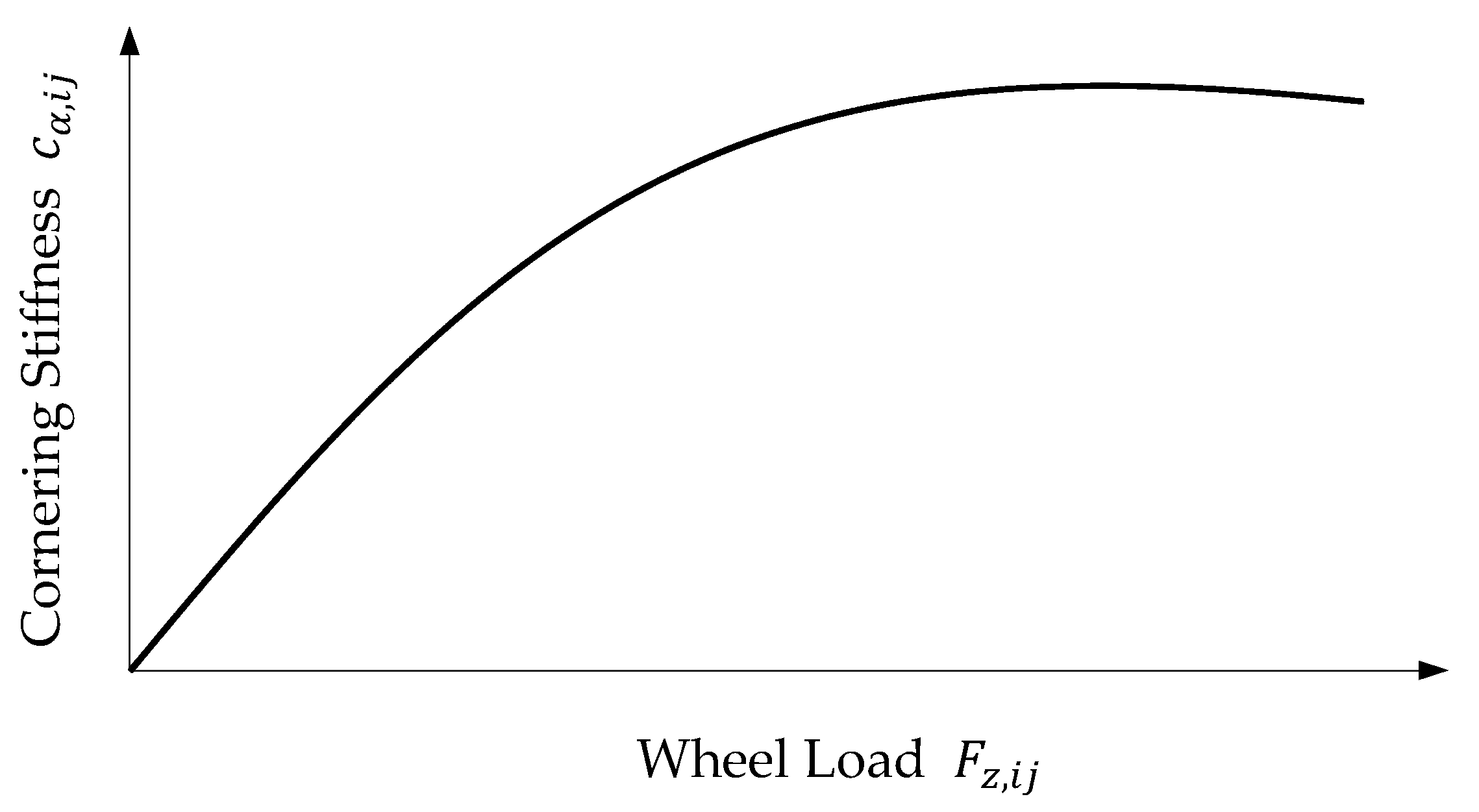
3.1.2. Self-Steering Behavior
3.1.3. Pitch Behavior
3.2. Optimization
4. Results
4.1. Validation Maneuvers
4.2. Double Lane Change
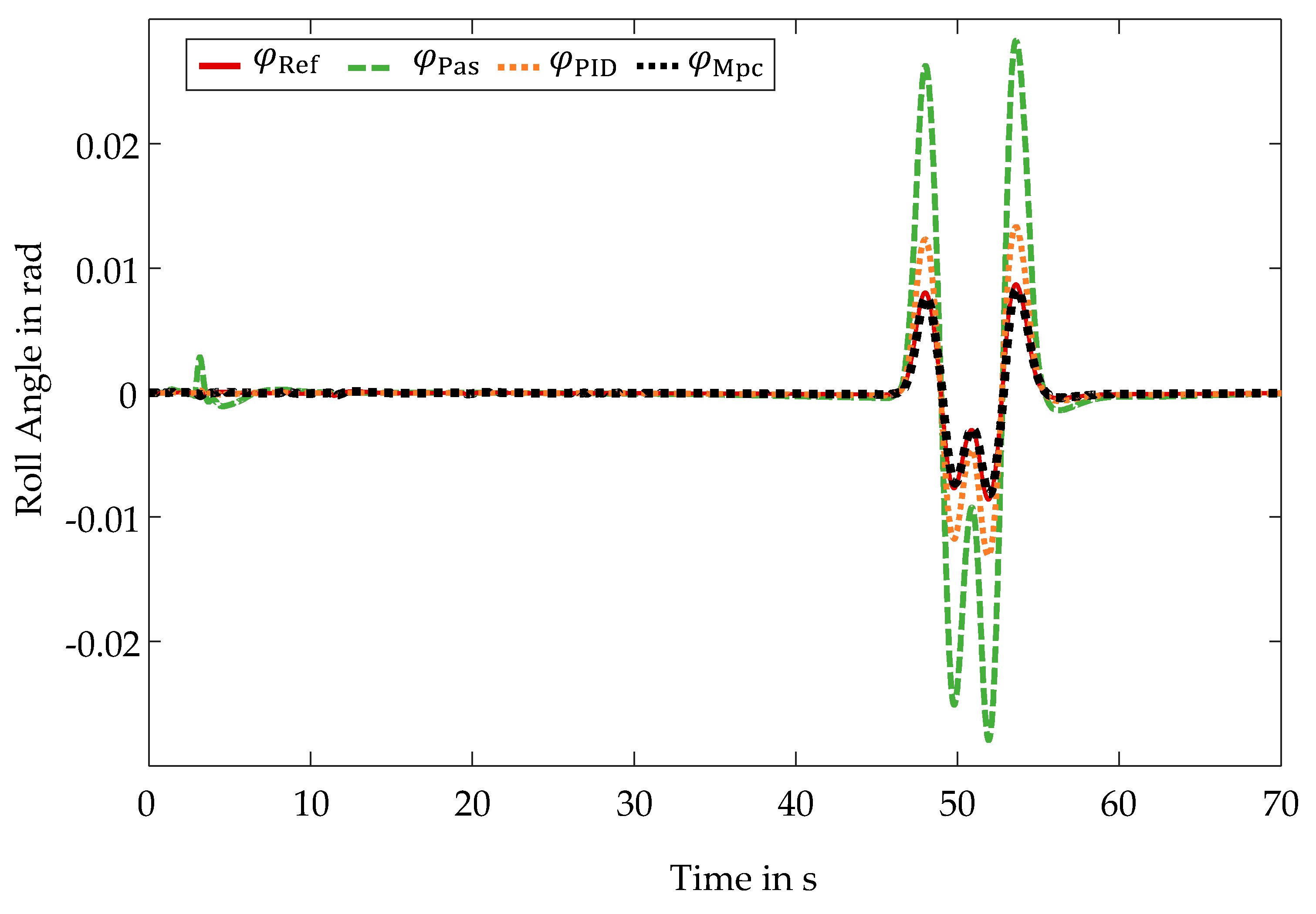
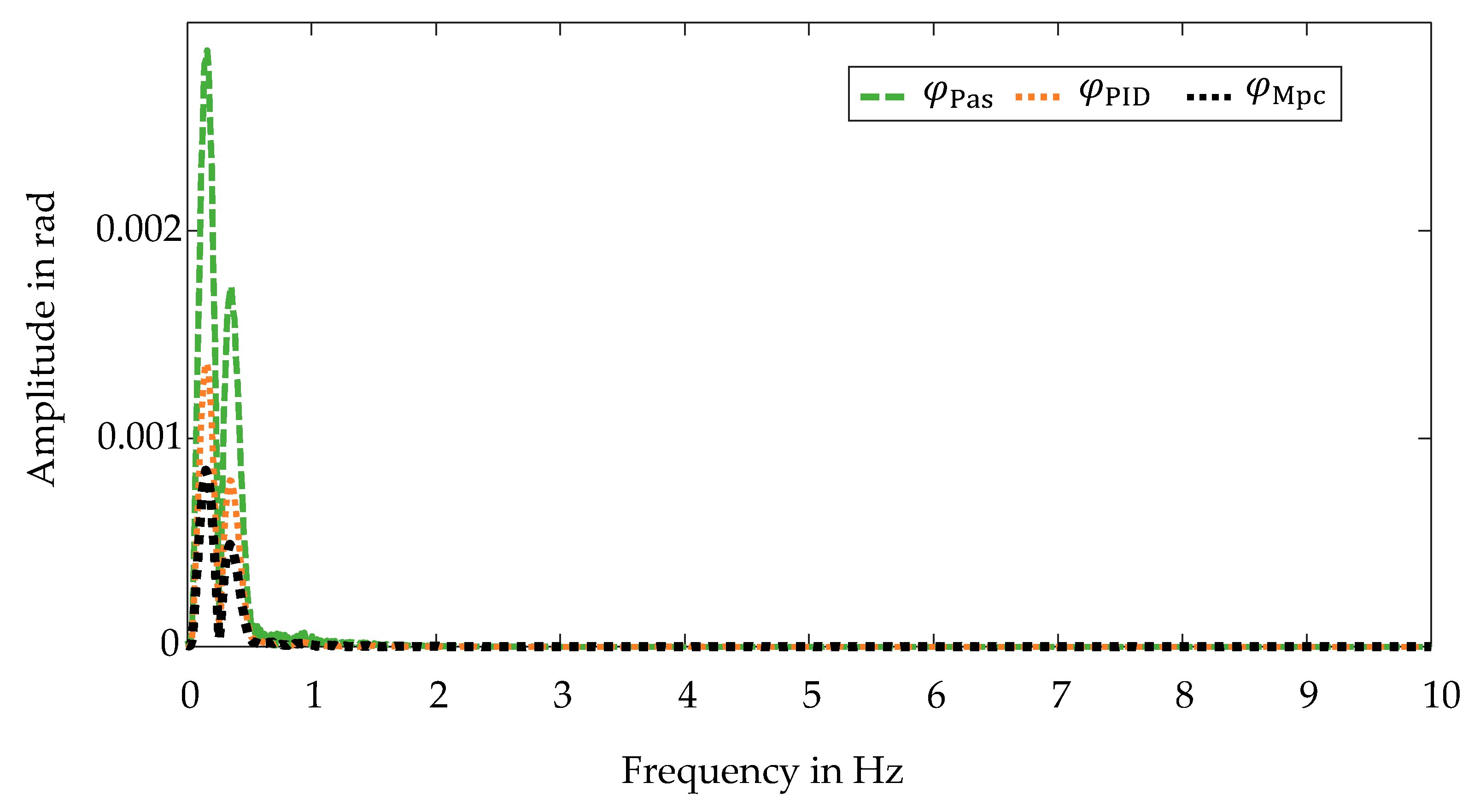
4.2.1. Roll Behavior
4.2.2. Self-Steering Behavior
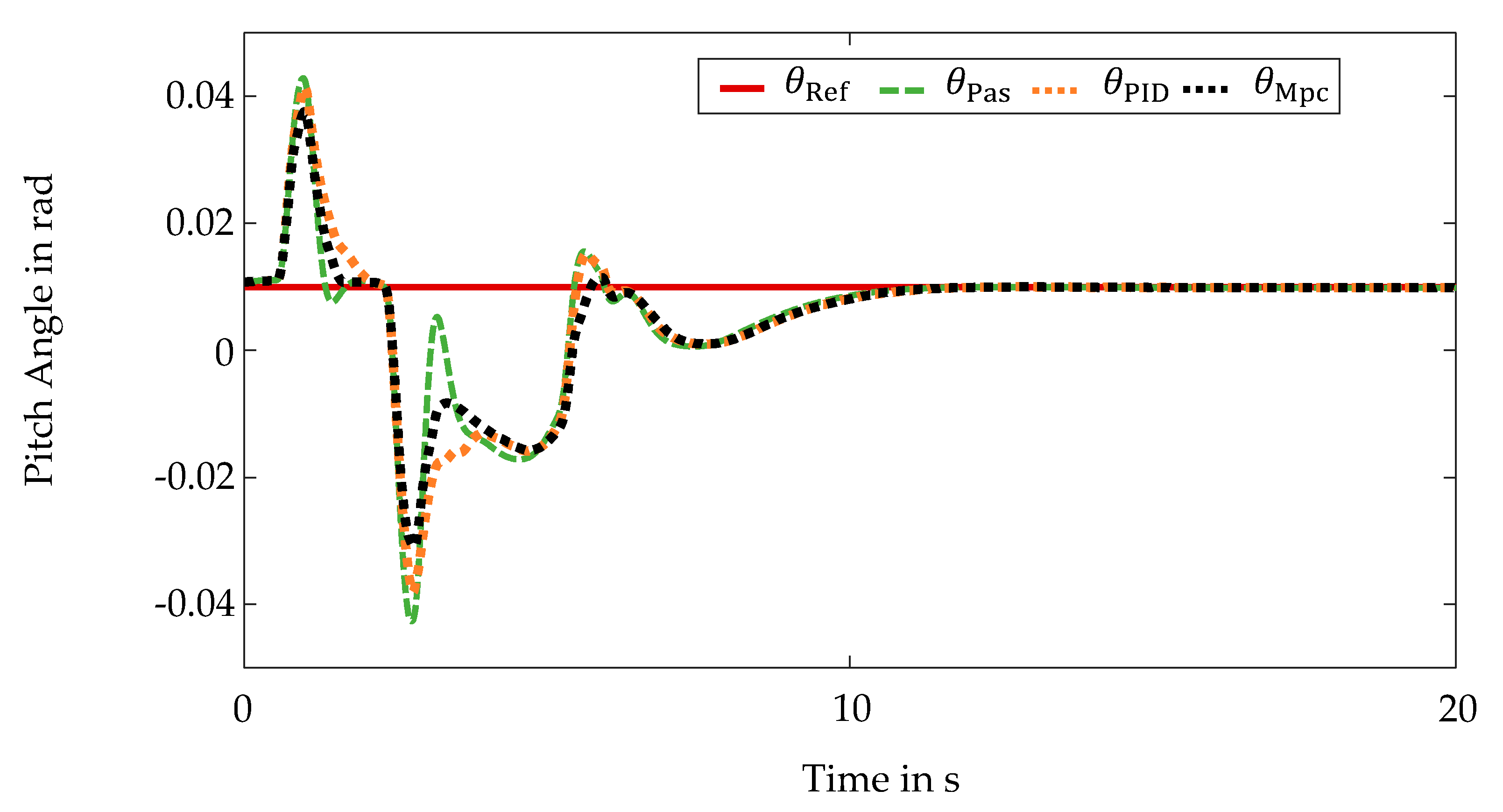
4.2.3. Pitch Behavior
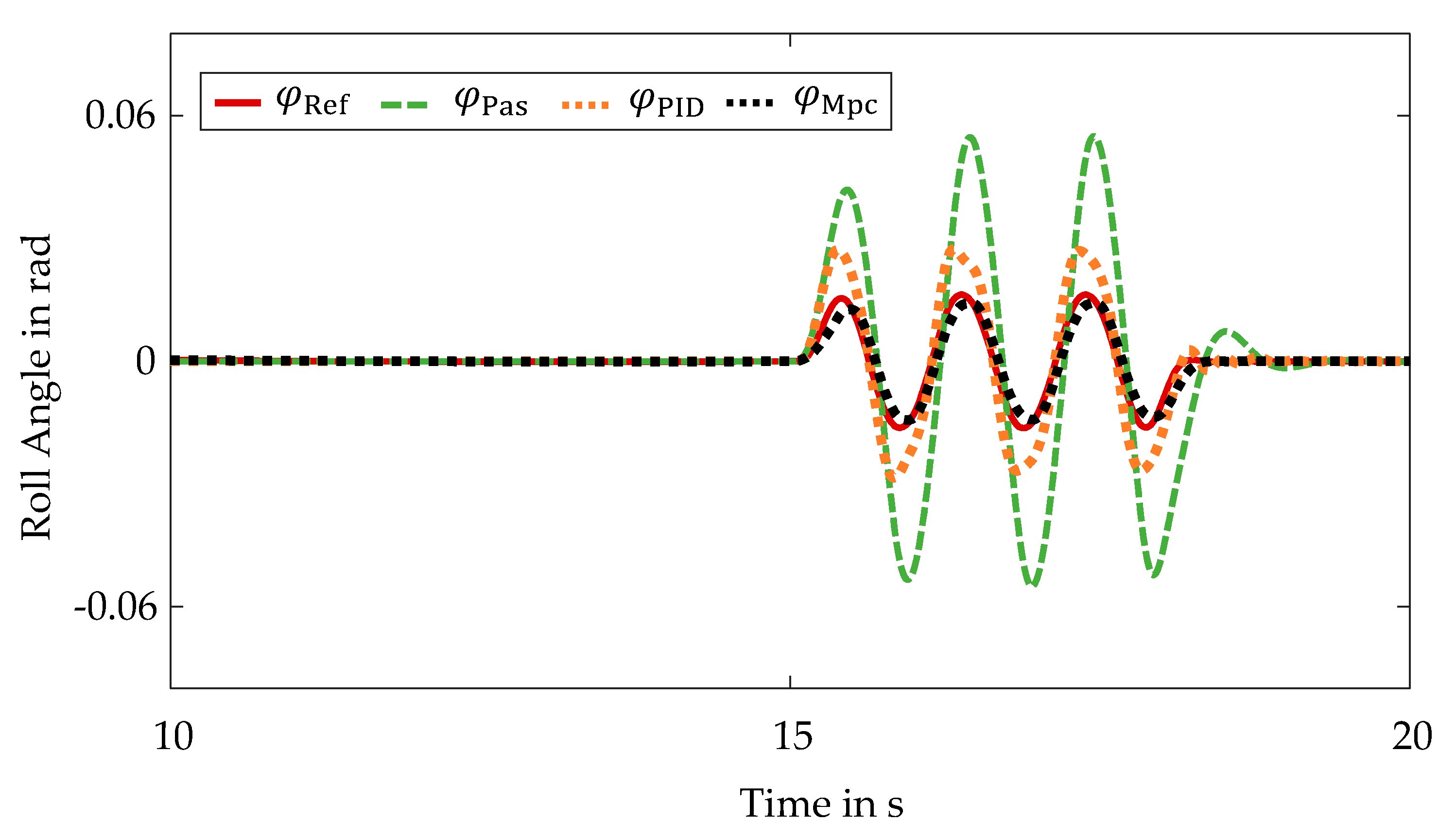
4.3. Sinusoidal Steering
4.3.1. Roll Behavior
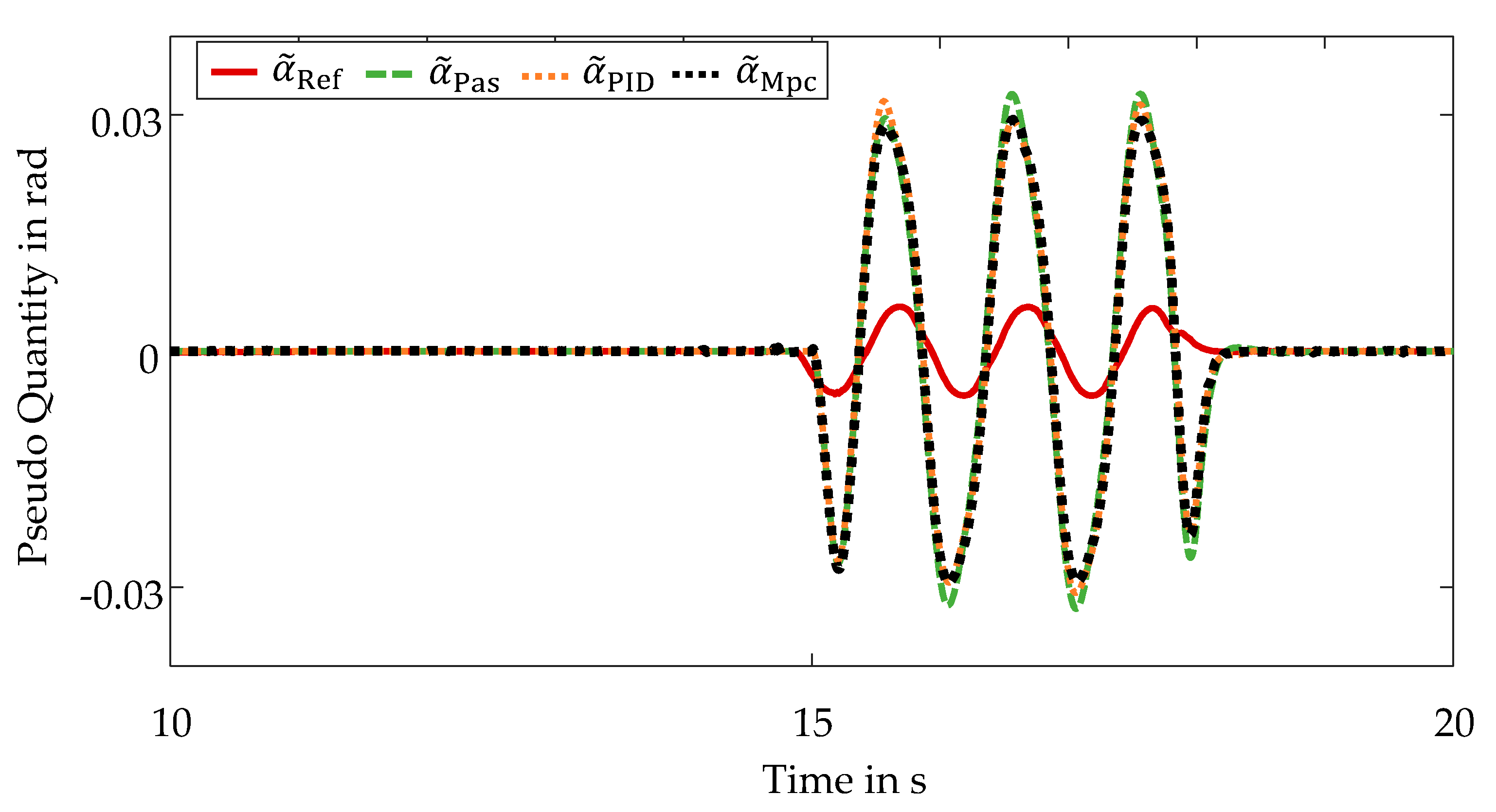
4.3.2. Self-Steering Behavior
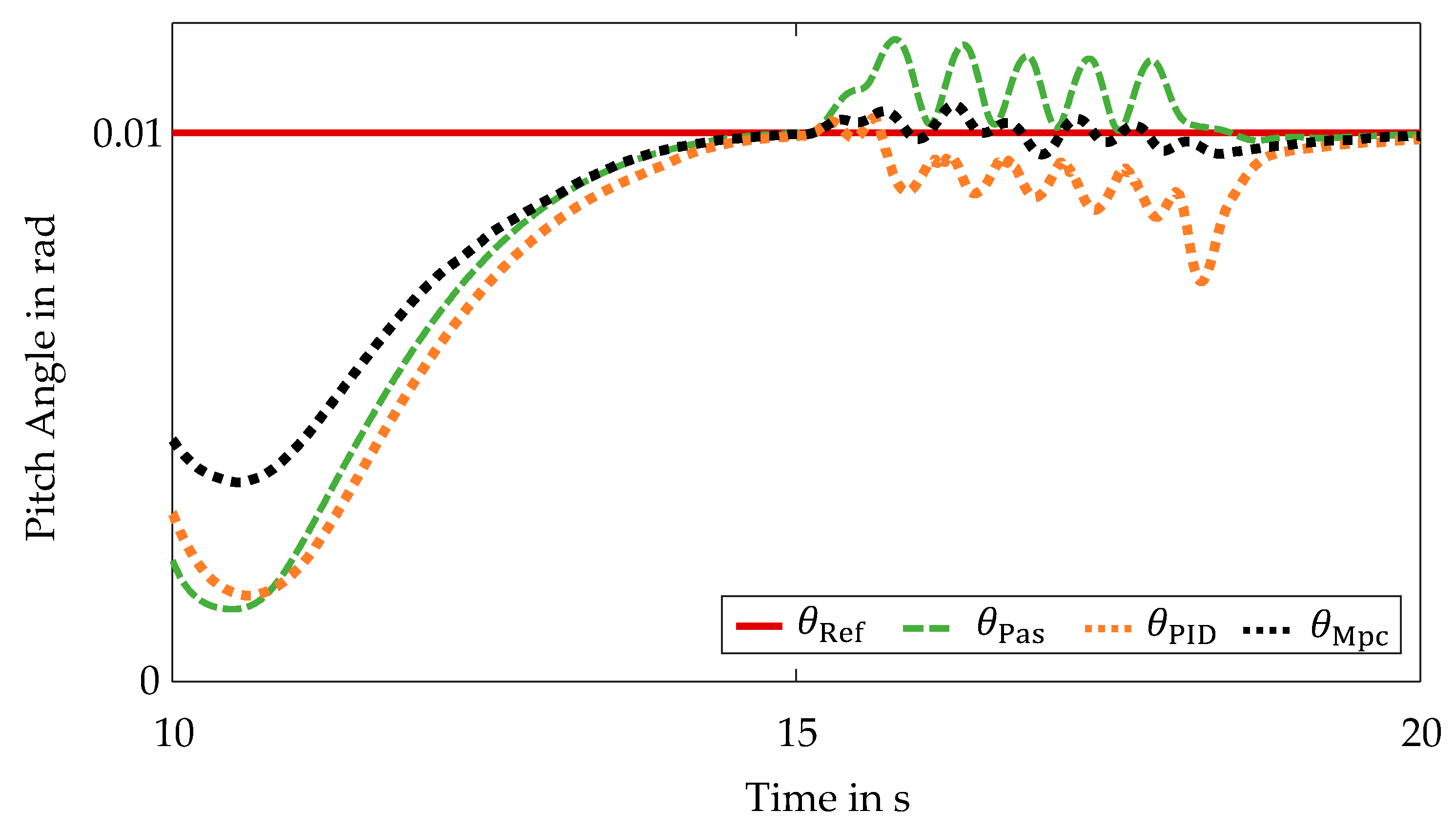
4.3.3. Pitch Behavior
4.4. Conclusions
5. Conclusions and Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Johansson, R. Vision Zero—Implementing a policy for traffic safety. Safety Sci. 2009, 47, 826–831. [Google Scholar] [CrossRef]
- Elbanhawi, M.; Simic, M.; Jazar, R. In the Passenger Seat: Investigating Ride Comfort Measures in Autonomous Cars. IEEE Intell. Transp. Syst. Mag. 2015, 7, 4–17. [Google Scholar] [CrossRef]
- Chen, W.; Xiao, H.; Wang, Q.; Zhao, L.; Zhu, M. Integrated Vehicle Dynamics and Control; John Wiley & Sons Singapore Pte. Ltd.: Singapore, 2016. [Google Scholar]
- Fan, Y.; Dao-Fei, L.; Crolla, D.A. Integrated Vehicle Dynamics Control—State-of-the art review. In Proceedings of the 2008 IEEE Vehicle Power and Propulsion Conference, Harbin, China, 3–5 September 2008; pp. 1–6. [Google Scholar]
- Sieberg, P.M.; Blume, S.; Reicherts, S.; Schramm, D. Nichtlineare modellbasierte prädiktive Regelung der Fahrzeugdynamik in Bezug auf eine aktive Wankstabilisierung und eine Nickreduzierung. In Forschung im Ingenieurwesen; Springer: Berlin/Heidelberg, Germany, 2019; Volume 83, pp. 119–127. [Google Scholar]
- Ikenaga, S.; Lewis, F.L.; Campos, J.; Davis, L. Active suspension control of ground vehicle based on a full-vehicle model. In Proceedings of the 2000 American Control Conference, ACC (IEEE Cat. No.00CH36334), Chicago, IL, USA, 28–30 June 2000; Volume 4016, pp. 4019–4024. [Google Scholar]
- Chang, S.; Gordon, T.J. A flexible hierarchical model-based control methodology for vehicle active safety systems. Veh. Syst. Dyn. 2008, 46, 63–75. [Google Scholar] [CrossRef] [Green Version]
- Bahr, M.; Reicherts, S.; Sieberg, P.; Morss, L.; Schramm, D. Application of Artificial Neural Networks for Active Roll Control Based on Actor-Critic Reinforcement Learning. In Proceedings of the Simulation and Modeling Methodologies, Technologies and Applications, Prague, Czech Republic, 29–31 July 2021; pp. 61–82. [Google Scholar]
- Li, H.-m.; Wang, X.-b.; Song, S.-B.; Li, H. Vehicle Control Strategies Analysis Based on PID and Fuzzy Logic Control. Procedia Eng. 2016, 137, 234–243. [Google Scholar] [CrossRef] [Green Version]
- Sands, T. Development of Deterministic Artificial Intelligence for Unmanned Underwater Vehicles (UUV). J. Mar. Sci. Eng. 2020, 8, 578. [Google Scholar] [CrossRef]
- Camacho, E.F.; Bordons, C.A. Model Predictive Control; Springer: Berlin, Germany, 1998. [Google Scholar]
- Grüne, L.; Pannek, J. Nonlinear Model Predictive Control. In Nonlinear Model Predictive Control: Theory and Algorithms; Grüne, L., Pannek, J., Eds.; Springer: Cham, Switzerland, 2017; pp. 45–69. [Google Scholar] [CrossRef]
- Beal, C.E.; Gerdes, J.C. Predictive control of vehicle roll dynamics with rear wheel steering. In Proceedings of the 2010 American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010; pp. 1489–1494. [Google Scholar]
- Mehra, R.K.; Amin, J.N.; Hedrick, K.J.; Osorio, C.; Gopalasamy, S. Active suspension using preview information and model predictive control. In Proceedings of the 1997 IEEE International Conference on Control Applications, Hartford, CT, USA, 5–7 October 1997; pp. 860–865. [Google Scholar]
- Canale, M.; Milanese, M.; Novara, C. Semi-Active Suspension Control Using “Fast” Model-Predictive Techniques. IEEE Trans. Control Syst. Technol. 2006, 14, 1034–1046. [Google Scholar] [CrossRef] [Green Version]
- Hrovat, D. Survey of Advanced Suspension Developments and Related Optimal Control Applications. Automatica 1997, 33, 1781–1817. [Google Scholar] [CrossRef]
- Giua, A.; Seatzu, C.; Usai, G. Semiactive Suspension Design with an Optimal Gain Switching Target. Veh. Syst. Dyn. 1999, 31, 213–232. [Google Scholar] [CrossRef]
- Sieberg, P.M.; Hürten, C.; Schramm, D. Representation of an Integrated Non-Linear Model-Based Predictive Vehicle Dynamics Control System by a Co-Active Neuro-Fuzzy Inference System. In Proceedings of the 2020 IEEE Intelligent Vehicles Symposium (IV), Las Vegas, NV, USA, 19 October–13 November 2020; pp. 572–577. [Google Scholar]
- Sieberg, P.M.; Blume, S.; Reicherts, S.; Maas, N.; Schramm, D. Hybrid State Estimation—A Contribution towards Reliability Enhancement of Artificial Neural Network Estimators. IEEE Trans. Intell. Transp. Syst. 2021. [Google Scholar] [CrossRef]
- Sieberg, P.M.; Blume, S.; Schramm, D. Side-Slip Angle Estimation by Artificial Neural Networks for Vehicle Dynamics Control Applications. In Proceedings of the AmE 2021—Automotive meets Electronics 12th GMM-Symposium, Online, 10–11 March 2021. [Google Scholar]
- Blume, S.; Sieberg, P.M.; Maas, N.; Schramm, D. Neural Roll Angle Estimation in a Model Predictive Control System. In Proceedings of the IEEE Intelligent Transportation Systems Conference (ITSC)/ITSC 2019, Auckland, New Zealand, 27–30 October 2019; pp. 1625–1630. [Google Scholar]
- Rossiter, J.A. Model-Based Predictive Control—A Practical Approach; CRC Press: Boca Raton, FL, USA, 2004; p. 344. [Google Scholar]
- Cromer, A. Stable solutions using the Euler approximation. Am. J. Phys. 1981, 49, 455–459. [Google Scholar] [CrossRef]
- Schramm, D.; Hesse, B.; Maas, N.; Unterreiner, M. Vehicle Technology—Technical Foundations of Current and Future Motor Vehicles; De Gruyter Oldenbourg: Berlin, Germay; Boston, MA, USA, 2020. [Google Scholar] [CrossRef]
- Schramm, D.; Hiller, M.; Bardini, R. Vehicle Dynamics: Modeling and Simulation, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar] [CrossRef]
- Butcher, J.C. Numerical Methods for Ordinary Differential Equations, 3rd ed.; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2016. [Google Scholar] [CrossRef]
- Pacejka, H.B. Tyre and Vehicle Dynamics, 2nd ed.; Butterworth-Heinemann: Oxford, UK, 2006; p. 1. [Google Scholar]
- Waltz, R.A.; Morales, J.L.; Nocedal, J.; Orban, D. An interior algorithm for nonlinear optimization that combines line search and trust region steps. Math. Program. 2006, 107, 391–408. [Google Scholar] [CrossRef]
- Ypma, T.J. Historical Development of the Newton-Raphson Method. SIAM Rev. 1995, 37, 531–551. [Google Scholar] [CrossRef] [Green Version]
- Yildirim, E.A.; Wright, S.J. Warm-Start Strategies in Interior-Point Methods for Linear Programming. SIAM J. Optim. 2002, 12, 782–810. [Google Scholar] [CrossRef]
- ISO. ISO 3888-1:2018 Passenger Cars—Test Track for a Severe Lane-Change Manoeuvre—Part 1: Double Lane-Change; International Organisation for Standardization (ISO): Geneva, Switzerland, 2018. [Google Scholar]
- ISO. ISO 13674-1:2010 Road Vehicles—Test Method for the Quantification of on-Centre Handling—Part 1: Weave Test; International Organisation for Standardization (ISO): Geneva, Switzerland, 2010. [Google Scholar]
- Sieberg, P.M.; Reicherts, S.; Schramm, D. Nichtlineare modellbasierte prädiktive Regelung zur aktiven Wankstabilisierung von Personenkraftwagen. In Proceedings of the Vierte IFToMM D-A-CH Konferenz 2018, Lausanne, Switzerland, 15–16 February 2018; pp. 1–8. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Vehicle Body Mass | 1820 | kg |
| Track Width | 1.538 | m |
| Wheelbase | 2.75 | m |
| Tires | 235/55R18 | - |
| Distance of the Center of Gravity to the Front Axle | 1.343 | m |
| Distance of the Center of Gravity to the Rear Axle | 1.407 | m |
| Height of the Center of Gravity | 0.682 | m |
| Height of the Center of Pitching | 0.3257 | m |
| Height of the Center of Rolling | 0.2826 | m |
| Moment of Inertia about the Lateral Axis | 2654 | kg m2 |
| Moment of Inertia about the Longitudinal Axis | 760 | kg m2 |
| Moment of Inertia about the Vertical Axis | 2774 | kg m2 |
| Setup | Driving Maneuver | Vehicle Dynamics | RMSE | Unit |
|---|---|---|---|---|
| Passive Chassis | Double Lane Change | Roll Behavior | rad | |
| Self-Steering Behavior | rad | |||
| Pitch Behavior | rad | |||
| Sinusoidal Steering | Roll Behavior | rad | ||
| Self-Steering Behavior | rad | |||
| Pitch Behavior | rad | |||
| Proportional Integral Derivative Control and Skyhook Damping | Double Lane Change | Roll Behavior | rad | |
| Self-Steering Behavior | rad | |||
| Pitch Behavior | rad | |||
| Sinusoidal Steering | Roll Behavior | rad | ||
| Self-Steering Behavior | rad | |||
| Pitch Behavior | rad | |||
| Central Predictive Control | Double Lane Change | Roll Behavior | rad | |
| Self-Steering Behavior | rad | |||
| Pitch Behavior | rad | |||
| Sinusoidal Steering | Roll Behavior | rad | ||
| Self-Steering Behavior | rad | |||
| Pitch Behavior | rad |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sieberg, P.M.; Schramm, D. Central Non-Linear Model-Based Predictive Vehicle Dynamics Control. Appl. Sci. 2021, 11, 4687. https://doi.org/10.3390/app11104687
Sieberg PM, Schramm D. Central Non-Linear Model-Based Predictive Vehicle Dynamics Control. Applied Sciences. 2021; 11(10):4687. https://doi.org/10.3390/app11104687
Chicago/Turabian StyleSieberg, Philipp Maximilian, and Dieter Schramm. 2021. "Central Non-Linear Model-Based Predictive Vehicle Dynamics Control" Applied Sciences 11, no. 10: 4687. https://doi.org/10.3390/app11104687
APA StyleSieberg, P. M., & Schramm, D. (2021). Central Non-Linear Model-Based Predictive Vehicle Dynamics Control. Applied Sciences, 11(10), 4687. https://doi.org/10.3390/app11104687