
Real Driving Emission Calibration—Review of Current Validation Methods against the Background of Future Emission Legislation


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Challenges Posed by the Upcoming Emission Legislation
- Driving dynamics
- Ambient temperatures
- Altitudes
- Payloads
- Types of driving distances with emphasis on short trips, cold starts, and warm starts
- OEM must ensure that emissions are low across the entire engine operation map by means of appropriate control mechanisms [27,30]. In recent years, feasibility of this topic has already been demonstrated by various studies, particularly in the context of CO emissions from gasoline engines [30,31,32].
- On Board Diagnostics (OBD) functionality is to be demonstrated under RDE conditions.
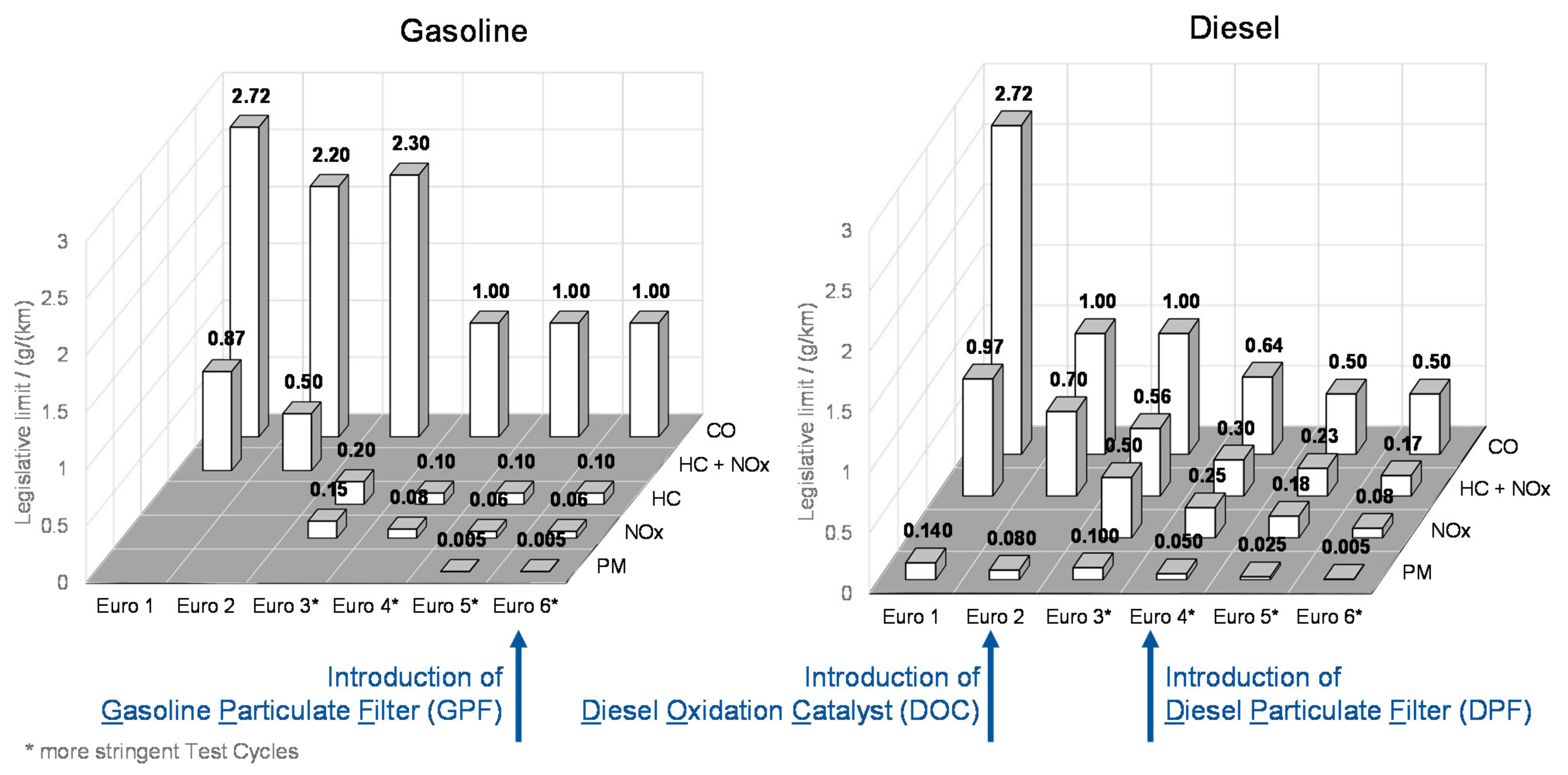
- Implementation of stricter and uniform limit values for pollutant emissions of the various propulsion technologies [35].
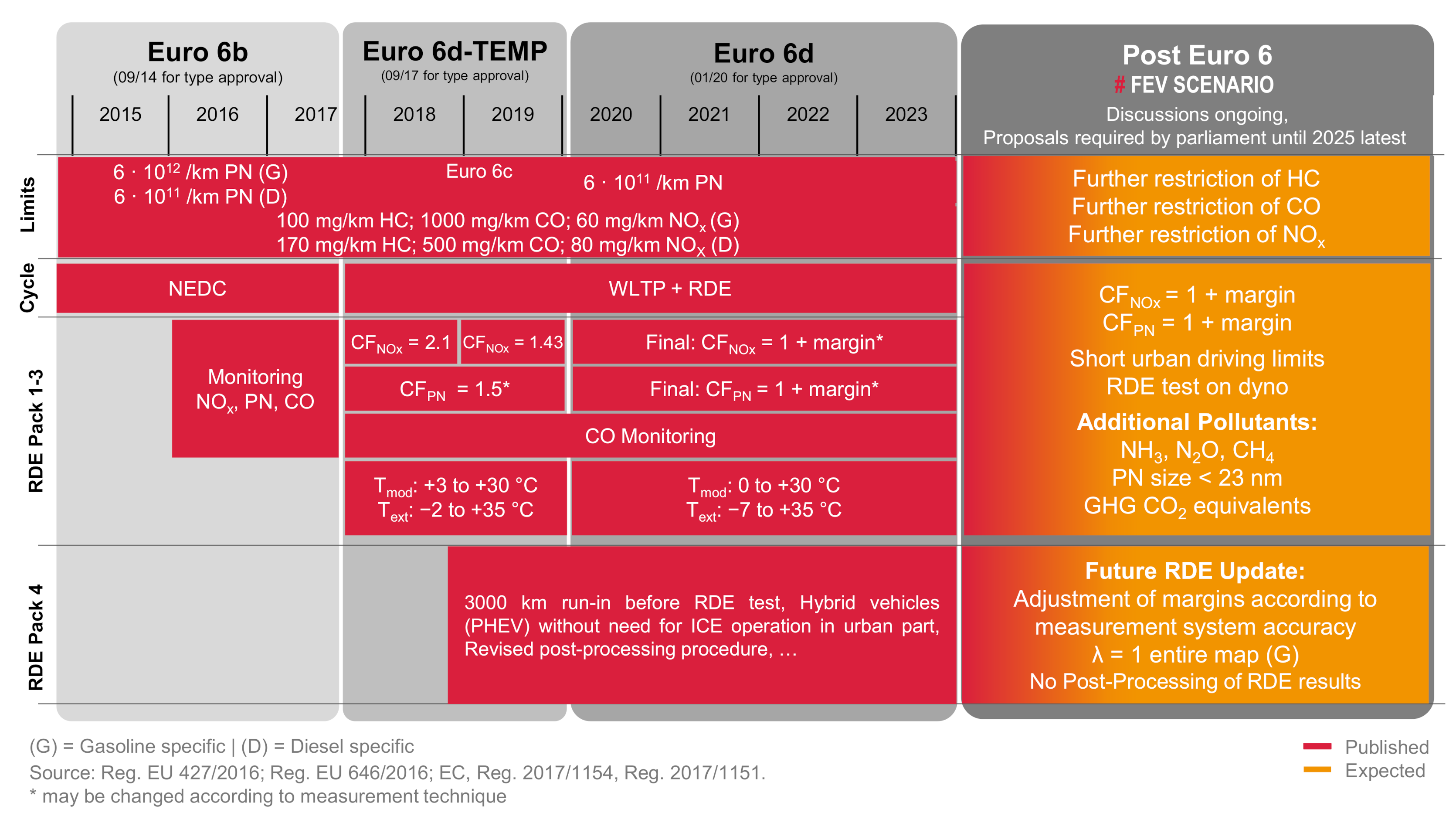
- Introduction of limits for additional pollutants [2,7,35]—new emissions species considered relevant are: nitrogen dioxide (NO2), nitrous oxide (N2O), ammonia (NH3), formaldehyde (CH2O), particle number (for diameters of solid particles >: PN10), methane (CH4) and non-methane organic gases (NMOG) [15,36].
- Type approval as such will continue to take place on the chassis dynamometer for an indefinite period of time and will be supplemented by RDE tests on the road. However, the focus could gradually (comparable to the stages between EU6b and EU6d (final)) be shifted more and more toward “certification of Air Pollutants and verification of [Green House Gases (GHG)]” [27] by RDE tests with PEMS. For many of the non-regulated pollutants, there are already promising approaches for on-road measurements. Examples are the measurement of N2O, NH3, CH4 and CH2O during on-road operation in [37], which shows good results in correlation with laboratory measurement technology. However, further testing is necessary [27].
- The RDE test procedure will be significantly modified:
- “New pollutants”—Is measurement technology up to the task?
- Progressive shift of test operations from the laboratory onto the road
- Increase of possible test cases: “Wider RDE testing range” in “order to address all driving conditions” [14]
- Vehicle testing according to actual use: “Normal use and normal conditions will be reassessed” [15]
3. Problem Analysis and Consequences of Potential Legislative Amendments for Calibration
3.1. “New Pollutants”—Is Measurement Technology up to the Task?
- CPC systems had 25% to 50% differences compared to the reference systems
- diffusion charger systems had 50% to 100% differences [40]
3.2. Progressive Shift of Test Operations from the Laboratory onto the Road
3.3. Increase of Possible Test Cases: “Wider RDE Testing Range”
3.4. Vehicle Testing according to Actual Use: “Normal Use and Normal Conditions Will Be Reassessed”
4. Review of Current Methodologies against the Background of Calibration Challenges
- Sufficient flexibility toward the measurement of additional pollutant emissions
- Appropriate measurement accuracy in a suitable test environment
- Ability to adapt new/modified RDE boundary conditions
- Consideration of representative driver-vehicle-interaction (“normal use”)
- Possibility to emulate all influencing ambient conditions
- Product or vehicle-specific problem identification and consideration
- Examination of the entire relevant operating area for weak spots within the application
- Reproducibility to validate the success of applicative changes
- Efficient usage of available measurement data
- Worst-case cycles:
- ○
- (Fleet) generic cycles—often characterized by high driving dynamics
- ○
- Pollutant specific created cycles based on simulation and/or Design of Experiment (DoE)
- Real driving route testing—measurements with PEMS on-road or as replay on test bed facilities
- Synthetically designed cycles based on (regionally) relevant driving behavior
4.1. Fleet Generic Cycles
4.2. Worst-Case Cycles
4.3. Real Driving Route Testing
4.4. Synthetically Designed Cycles Based on (Regionally) Relevant Driving Behavior
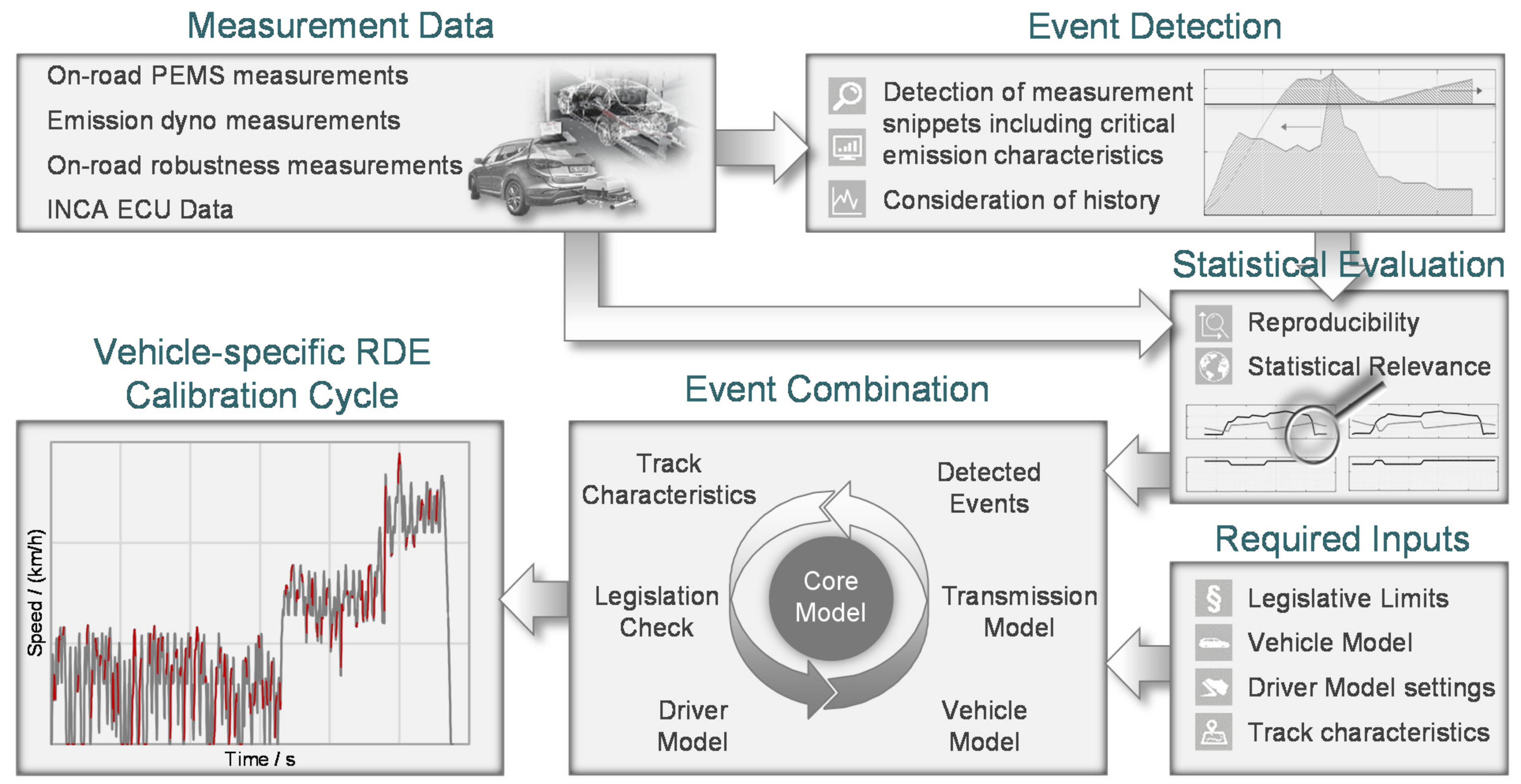
5. Implementation of Solutions and Presentation of a Suitable RDE Development and Validation Methodology
6. Conclusions and Outlook
- Possibility of execution in an environment that allows the use of highly accurate measurement equipment under laboratory conditions.
- Ability of considering new pollutants and their dependence on the condition of the aftertreatment system.
- Inclusion of the statistical relevance of a specific test scenario to ensure compliance with future legislative requirements with respect to typical vehicle use under real-world conditions.
- Flexibility with varying boundary conditions, such as minimum driving distances, distance shares, altitude and temperature requirements or limitations for driving dynamics.
- Focus on critical emission intensity scenarios to support the calibration process and provide sound validation.
Author Contributions
Funding
Informed Consent Statement
Conflicts of Interest
References
- Reitz, R.D.; Ogawa, H.; Payri, R.; Fansler, T.; Kokjohn, S.; Moriyoshi, Y.; Agarwal, A.; Arcoumanis, D.; Assanis, D.; Bae, C.; et al. IJER editorial: The future of the internal combustion engine. Int. J. Engine Res. 2020, 21, 3–10. [Google Scholar] [CrossRef] [Green Version]
- Thewes, M.; Balazs, A.; Yadla, S.K.; Walter, V.; Gorgen, M.; Scharf, J. Zero-Impact Combustion Engine. In Proceedings of the 28th Aachen Colloquium Automobile and Engine Technology, Aachen, Germany, 7–9 October 2019. [Google Scholar]
- Jeon, J.; Bock, N.; Kittelson, D.B.; Northrop, W.F. Correlation of nanoparticle size distribution features to spatiotemporal flame luminosity in gasoline direct injection engines. Int. J. Engine Res. 2020, 21, 1107–1117. [Google Scholar] [CrossRef]
- European Parliament and Council. Commission Regulation (EU) 2018/1832. 2018. Available online: https://eur-lex.europa.eu/legal-content/GA/TXT/?uri=CELEX:32018R1832 (accessed on 14 April 2021).
- Claßen, J.; Sterlepper, S.; Dorscheidt, F.; Görgen, M.; Scharf, J.; Nijs, M.; Alt, N.; Balasz, A.; Böhmer, M.; Doucet, M.; et al. RDE-Cycle-Generation—A Statistical Approach to Provide a Secure Base to Approve RDE Legislation Compliance. In Proceedings of the SCC Symposium for Combustion Control, Aachen, Germany, 5–6 June 2019. [Google Scholar]
- Fraidl, G.; Kapus, P.; Vidmar, K. The gasoline engine and RDE challenges and prospects. In Proceedings of the 16th Internationales Stuttgarter Symposium; Metzler, J.B., Ed.; Springer: Wiesbaden, Germany, 2016; pp. 257–283. [Google Scholar]
- Scharf, J.; Thewes, M.; Balazs, A.; Görgen, M.; Böhmer, M.; Yadla, S.K.; Lückenbach, S.; Speckens, F.-W.; Doucet, M.; Guse, D. All clean gasoline hybrid powertrains—Real driving emissions, lambda = 1 & Euro 7. In Proceedings of the 27 Aachen Colloquium Automobile and Engine Technology, Aachen, Germany, 8–10 October 2018. [Google Scholar]
- Rexeis, M.; Hausberger, S. Trend of vehicle emission levels until 2020—Prognosis based on current vehicle measurements and future emission legislation. Atmos. Environ. 2009, 43, 4689–4698. [Google Scholar] [CrossRef]
- May, J.; Bosteels, D.; Favre, C. A Comparison of Light-Duty Vehicle Emissions Over Different Test Cycles and in Real Driving Conditions. In Proceedings of the FISITA Conference 2014, Maastricht, The Netherlands, 2–6 June 2014. [Google Scholar]
- Thompson, G.J.; Carder, D.K.; Besch, M.C.; Thiruvengadam, A.; Kappanna, H.K. In-Use Emissions Testing of Light-Duty Diesel Vehicles in the United States; International Council on Clean Transportation (ICCT): San Francisco, CA, USA, 2014. [Google Scholar]
- Johnson, T.V. Review of Vehicular Emissions Trends. SAE Int. J. Engines 2015, 8, 1152–1167. [Google Scholar] [CrossRef] [Green Version]
- Huang, Y.; Surawski, N.; Organ, B.; Zhou, J.L.; Tang, O.H.; Chan, E.F. Fuel consumption and emissions performance under real driving: Comparison between hybrid and conventional vehicles. Sci. Total Environ. 2019, 659, 275–282. [Google Scholar] [CrossRef]
- Kieserling, A. Diesel-Fahrverbot: Welche Städte Sind Betroffen? 2020. Available online: https://www.handwerksblatt.de/themen-specials/gezerre-um-fahrverbote/dieselfahrverbot-welche-staedte-sind-betroffen (accessed on 30 March 2021).
- CLOVE Consortium. Study on Post EURO 6/VI Emission Standards in Europe: Presentation to the Advisory Group on Vehicle Emission Standards (AGVES). 2019. Available online: https://circabc.europa.eu/sd/a/a108e064-c487-4bf6-bb46-7faac76f8205/Post-EURO%206%20WT2.2_AGVES_2019_10_18%20V4.pdf (accessed on 1 April 2021).
- CLOVE Consortium. Study on Post EURO 6/VI Emission Standards in Europe (Part B): Presentation to the Advisory Group on Vehicle Emission Standards (AGVES). 2020. Available online: https://circabc.europa.eu/webdav/CircaBC/GROW/AGVES/Library/3%20meeting%204%20February%202020/Part%20B%20slides%20for%20AGVES%2020200131%20v4.pdf (accessed on 3 March 2021).
- Viehmann, S. Milliarden-Bußgelder und neue Grenzwerte: Wie die EU Elektroautos Erzwingt. 2018. Available online: https://www.focus.de/auto/news/abgas-skandal/abgasnorm-euro-7-schon-in-vorbereitung-milliarden-bussgelder-und-neue-grenzwerte-eu-will-elektroautos-erzwingen_id_8948048.html (accessed on 18 May 2018).
- Görgen, M.; Nijs, M.; Lehn, H.; Scharf, J.; Thewes, M.; Hendrikx, M.; Claßen, J.; Sterlepper, S.; Baumgarten, H. Current and Future Trends of Gasoline Particulate Filter Technologies, Calibration Strategies and Aging Methods. In Proceedings of the 26th Aachen Colloquium Automobile and Engine Technology, Aachen, Germany, 9–11 October 2017. [Google Scholar]
- Leach, F.; Stone, R.; Richardson, D. The Effect of Fuel Volatility and Aromatic Content on Particulate Emissions from GDI Engines. In Proceedings of the 16th ETH Conference on Combustion Generated Nanoparticles, University of Oxford, Oxford, UK, 24–27 June 2012. [Google Scholar]
- Vuk, C.; Griend, S.J.V. Fuel Property Effects on Particulates in Spark Ignition Engines; SAE Technical Paper Series; SAE Technical Paper 2013-01-1124; SAE Headquarter: Warrendale, PA, USA, 2013. [Google Scholar] [CrossRef]
- Wang, Y.; Zheng, R.; Shuai, S.-J.; Qin, Y.; Peng, J.; Niu, H.; Li, M.; Wu, Y.; Lu, S.; Hu, M. The Impact of Fuel Properties from Chinese Market on the Particulate and VOCs Emissions of a PFI and a DIG Engine; SAE Technical Paper 2016-01-0838; SAE Headquarter: Warrendale, PA, USA, 2016. [Google Scholar] [CrossRef]
- Sakai, S.; Rothamer, D. Effect of ethanol blending on particulate formation from premixed combustion in spark-ignition engines. Fuel 2017, 196, 154–168. [Google Scholar] [CrossRef]
- Fatouraie, M.; Frommherz, M.; Mosburger, M.; Chapman, E.; Li, S.; McCormick, R.; Fioroni, G. Investigation of the Impact of Fuel Properties on Particulate Number Emission of a Modern Gasoline Direct Injection Engine; SAE Technical Paper 2018-01-0358; SAE Headquarter: Warrendale, PA, USA, 2018. [Google Scholar] [CrossRef]
- Guse, D.; Roehrich, H.; Lenz, M.; Pischinger, S. Influence of Vehicle Operators and Fuel Grades on Particulate Emissions of an SI Engine in Dynamic Cycles; SAE Technical Paper 2018-01-0350; SAE Headquarter: Warrendale, PA, USA, 2018. [Google Scholar] [CrossRef]
- Qin, J.; Li, X.; Pei, Y. Effects of Combustion Parameters and Lubricating Oil on Particulate Matter Emissions from a Turbo-Charged GDI Engine Fueled with Methanol/Gasoline Blends, SAE Technical Paper 2014-01-2841; SAE Headquarter: Warrendale, PA, USA, 2014. [CrossRef]
- Tabata, K.; Takahashi, M.; Takeda, K.; Tsurumi, K.; Kiya, Y.; Tobe, S.; Ogura, A. Studies on Characteristics of Nanoparticles Generated in a Gasoline Direct-Injection Engine; SAE Technical Paper 2019-01-2328; SAE Headquarter: Warrendale, PA, USA, 2019. [Google Scholar]
- Singh, R.; Han, T.; Fatouraie, M.; Mansfield, A.; Wooldridge, M.; Boehman, A. Influence of fuel injection strategies on efficiency and particulate emissions of gasoline and ethanol blends in a turbocharged multi-cylinder direct injection engine. Int. J. Engine Res. 2021, 22, 152–164. [Google Scholar] [CrossRef]
- CLOVE Consortium. Study on Post-EURO 6/VI Emission Standards in Europe (Part A): Presentation to the Advisory Group on Vehicle Emission Standards (AGVES). 2020. Available online: https://circabc.europa.eu/webdav/CircaBC/GROW/AGVES/Library/3%20meeting%204%20February%202020/Part%20A%20slides%20for%20AGVES%2020200131%20v3.pdf (accessed on 3 March 2021).
- Giechaskiel, B.; Zardini, A.A.; Clairotte, M. Exhaust Gas Condensation during Engine Cold Start and Application of the Dry-Wet Correction Factor. Appl. Sci. 2019, 9, 2263. [Google Scholar] [CrossRef] [Green Version]
- De Prez, M. FleetNews. European Commission Starts Development of Euro 7 Emissions Standards. 2020. Available online: https://www.fleetnews.co.uk/news/environment/2020/07/10/european-commission-starts-development-of-euro-7-emissions-standards (accessed on 10 July 2020).
- Görgen, M.; Balazs, A.; Böhmer, M.; Nijs, M.; Lehn, H.; Scharf, J.; Thewes, M.; Müller, A.; Alt, N.; Claßen, J.; et al. All lambda 1 gasoline powertrains. In Proceedings of the Internationaler Motorenkongress 2018; Liebl, J., Beidl, C., Maus, W., Eds.; Springer: Wiesbaden, Germany, 2018; pp. 93–111. ISBN 978-3-658-21014-4. [Google Scholar]
- Baumgarten, H.; Görgen, M.; Balazs, A.; Nijs, M.; Lehn, H.; Scharf, J.; Thewes, M.; Böhmer, M.; Alt, N.; Claßen, J.; et al. New Lambda = 1 Gasoline Powertrains New Technologies and Their Interaction with Connected and Autonomous Driving. In Proceedings of the 30th International AVL Conference “Engine & Environment”, Graz, Austria, 7–8 June 2018. [Google Scholar]
- Millo, F.; Accurso, F.; Zanelli, A.; Rolando, L. Numerical Investigation of 48 V Electrification Potential in Terms of Fuel Economy and Vehicle Performance for a Lambda-1 Gasoline Passenger Car. Energies 2019, 12, 2998. [Google Scholar] [CrossRef] [Green Version]
- Wieler, J. Euro 6d Abgasnorm: Diese Pkw Erfüllen die Neuesten Vorschriften. ADAC. 2020. Available online: https://www.adac.de/rund-ums-fahrzeug/auto-kaufen-verkaufen/neuwagenkauf/euro-6d-temp-modelle/ (accessed on 4 December 2020).
- Viehmann, S. Selbst Hybridfahrzeuge im Visier: Wie die EU bei jeder Fahrt den CO2-Ausstoß überwacht. 2020. Available online: https://www.focus.de/auto/news/brisantes-gutachten-selbst-hybridfahrzeugen-droht-aus-eu-plant-totalueberwachung-bei-verbrauch-und-co2_id_12394141.html (accessed on 9 March 2021).
- Sterlepper, S.; Claßen, J.; Pischinger, S.; Görgen, M.; Cox, J.; Nijs, M.; Scharf, J. Relevance of Exhaust Aftertreatment System Degradation for EU7 Gasoline Engine Applications; SAE Technical Paper 2020-01-0382; SAE Headquarter: Warrendale, PA, USA, 2020. [Google Scholar] [CrossRef]
- Nottelmann, S.; Kureti, S. Literature Study on Secondary and Non-Regulated Emissions of Combustion Engines: Secondary Emissions/Non-Regulated Emissions; FVV Final Report: Frankfurt am Main, Germany, 2019. [Google Scholar]
- Suarez-Bertoa, R.; Pechout, M.; Vojtíšek, M.; Astorga, C. Regulated and Non-Regulated Emissions from Euro 6 Diesel, Gasoline and CNG Vehicles under Real-World Driving Conditions. Atmosphere 2020, 11, 204. [Google Scholar] [CrossRef] [Green Version]
- Grand View Research Inc. Vehicle Emissions Test System Market: Analysis and Forecasts from 2016 to 2027; Report ID: GVR-2-68038-771-1; Grand View Research Inc.: San Francisco, CA, USA, 2020. [Google Scholar]
- Giechaskiel, B.; Bonnel, P.; Perujo, A.; Dilara, P. Solid Particle Number (SPN) Portable Emissions Measurement Systems (PEMS) in the European Legislation: A Review. Int. J. Environ. Res. Public Health 2019, 16, 4819. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Giechaskiel, B.; Lähde, T.; Gandi, S.; Keller, S.; Kreutziger, P.; Mamakos, A. Assessment of 10-nm Particle Number (PN) Portable Emissions Measurement Systems (PEMS) for Future Regulations. Int. J. Environ. Res. Public Health 2020, 17, 3878. [Google Scholar] [CrossRef] [PubMed]
- Giechaskiel, B.; Casadei, S.; Mazzini, M.; Sammarco, M.; Montabone, G.; Tonelli, R.; Deana, M.; Costi, G.; Di Tanno, F.; Prati, M.V.; et al. Inter-Laboratory Correlation Exercise with Portable Emissions Measurement Systems (PEMS) on Chassis Dynamometers. Appl. Sci. 2018, 8, 2275. [Google Scholar] [CrossRef] [Green Version]
- Dorscheidt, F.; Sterlepper, S.; Görgen, M.; Nijs, M.; Claßen, J.; Yadla, S.K.; Maurer, R.; Pischinger, S.; Krysmon, S.; Abdelkader, A. Gasoline Particulate Filter Characterization Focusing on the Filtration Efficiency of Nano-Particulates Down to 10 nm; SAE Technical Paper 2020-01-2212; SAE Headquarter: Warrendale, PA, USA, 2020. [Google Scholar]
- Price, P.; Stone, R.; Collier, T.; Davies, M.; Scheer, V. Dynamic Particulate Measurements from a DISI Vehicle: A Comparison of DMS500, ELPI, CPC and PASS; SAE Technical Paper 2006-01-1077; SAE Headquarter: Warrendale, PA, USA, 2006. [Google Scholar] [CrossRef]
- Kulmala, M.; Mordas, G.; Petäjä, T.; Grönholm, T.; Aalto, P.P.; Vehkamäki, H.; Hienola, A.I.; Herrmann, E.; Sipilä, M.; Riipinen, I.; et al. The condensation particle counter battery (CPCB): A new tool to investigate the activation properties of nanoparticles. J. Aerosol Sci. 2007, 38, 289–304. [Google Scholar] [CrossRef]
- McMurry, P.H. The History of Condensation Nucleus Counters. Aerosol Sci. Technol. 2000, 33, 297–322. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Caldow, R.; Sem, G.J.; Hama, N.; Sakurai, H. Evaluation of a condensation particle counter for vehicle emission measurement: Experimental procedure and effects of calibration aerosol material. J. Aerosol Sci. 2010, 41, 306–318. [Google Scholar] [CrossRef]
- Suarez-Bertoa, R.; Lähde, T.; Pavlovic, J.; Valverde, V.; Clairotte, M.; Giechaskiel, B. Laboratory and On-Road Evaluation of a GPF-Equipped Gasoline Vehicle. Catalyst 2019, 9, 678. [Google Scholar] [CrossRef] [Green Version]
- Giechaskiel, B.; Mamakos, A.; Woodburn, J.; Szczotka, A.; Bielaczyc, P. Evaluation of a 10 nm Particle Number Portable Emissions Measurement System (PEMS). Sensors 2019, 19, 5531. [Google Scholar] [CrossRef] [Green Version]
- Giechaskiel, B.; Clairotte, M.; Valverde, V.; Bonnel, P. Real Driving Emissions: 2017 Assessment of PEMS Measurement Uncertainty; Publications Office of the European Union, European Commission: Ispra, Italy, 2017. [Google Scholar] [CrossRef]
- CLOVE Consortium. Preliminary Findings on Possible Euro 7 Emission Limits for Passenger Cars and LCVs. 2021. Available online: https://www.heise.de/downloads/18/3/0/8/5/7/1/4/AGVES-2021-04-08-LDV_Exhaust.pdf (accessed on 21 April 2021).
- Domínguez, D.E.C.; Lehmann, S.; López, V.V.; Palocz-Andresen, M. Micro PEMS for the Control of Emissions in Cars. In International Climate Protection; Metzler, J.B., Ed.; Springer Nature: Cham, Switzerland, 2019; pp. 247–253. [Google Scholar]
- Bodisco, T.; Zare, A. Practicalities and Driving Dynamics of a Real Driving Emissions (RDE) Euro 6 Regulation Homologation Test. Energies 2019, 12, 2306. [Google Scholar] [CrossRef] [Green Version]
- Böhmer, M. Simulation der Abgasemissionen von Hybridfahrzeugen für reale Fahrbedingungen. Ph.D. Thesis, Rheinisch-Westfälische Technische Hochschule Aachen, Aachen, Germany, 2017. [Google Scholar]
- Badshah, H.; Khalek, I.A. Solid Particle Emissions from Vehicle Exhaust during Engine Start-Up. SAE Int. J. Engines 2015, 8, 1492–1502. [Google Scholar] [CrossRef]
- Kim, C.H.; Paratore, M.; Gonze, E.; Solbrig, C.; Smith, S. Electrically Heated Catalysts for Cold-Start Emissions in Diesel After-treatment. In Proceedings of the SAE 2012 World Congress & Exhibition, Detroit, MI, USA, 24 April 2012; SAE International: Warrendale, PA, USA, 2012. [Google Scholar]
- Sivakumar, S.; Shingyouchi, H.; Yan, X.; Okajima, T.; Yamaguchi, K.; Kusaka, J.; Nagata, M. Effects of Using an Electrically Heated Catalyst on the State of Charge of the Battery Pack for Series Hybrid Electric Vehicles at Cold Start; SAE Technical Paper 2020-01-0444; SAE Headquarter: Warrendale, PA, USA, 2020. [Google Scholar]
- Rösel, G.; Achleitner, E.; Graf, F.; Rodatz, P.; Senft, P.; Brück, R.; Stock, H. Lowest Real Driving Emissions: Solutions for Electrified Gasoline Engines. In Proceedings of the 28th Aachen Colloquium Automobile and Engine Technology, Aachen, Germany, 7–9 October 2019. [Google Scholar]
- Jean, E.; Sommier, T.; Capirchia, M. Electric Heating for Exhaust Converters: The Key to Very Low Emission Levels. In Proceedings of the 28th Aachen Colloquium Automobile and Engine Technology, Aachen, Germany, 7–9 October 2019. [Google Scholar]
- Siegemund, S.; Schmidt, P.; Trommler, M.; Kolb, O.; Zinnecker, V. The Potential of Electricity-Based Fuels for Low-Emission Transport in the EU: E-Fuels Study. An Expertise by LBST and Dena; German Energy Agency: Berlin, Germany, 2017. [Google Scholar]
- Pischinger, S.; Neumann, D.; Heuser, B.; Leitner, W.; Schönen, M. Almost CO2-Neutral Mobility by Optimized E-Fuels Mix. FEV Spectrum 01(64). 2018. Available online: https://www.fev.com/fileadmin/user_upload/Media/Spectrum/en/Spectrum_64_EN_WEB.pdf (accessed on 14 December 2020).
- Ausfelder, F.; Wagemann, K. Power-to-Fuels: E-Fuels as an Important Option for a Climate-Friendly Mobility of the Future. Chem. Ing. Tech. 2020, 92, 21–30. [Google Scholar] [CrossRef]
- Maas, H.; Schamel, A.; Weber, C.; Kramer, U. Review of combustion engine efficiency improvements and the role of e-fuels. In Internationaler Motorenkongress 2016; Liebl, J., Beidl, C., Eds.; Springer: Wiesbaden, Germany, 2016; pp. 463–483. ISBN 978-3-658-12917-0. [Google Scholar]
- Gao, J.; Tian, G.; Sorniotti, A.; Karci, A.E.; Di Palo, R. Review of thermal management of catalytic converters to decrease engine emissions during cold start and warm up. Appl. Therm. Eng. 2019, 147, 177–187. [Google Scholar] [CrossRef]
- Krysmon, S.; Claßen, J.; Dorscheidt, F.; Düzgün, M.; Görgen, M.; Nijs, M. Real Driving Emission Calibration—Comparison of different RDE validation cycles and the impact on emissions. in preparation.
- Claßen, J.; Pischinger, S.; Krysmon, S.; Sterlepper, S.; Dorscheidt, F.; Doucet, M.; Reuber, C.; Görgen, M.; Scharf, J.; Nijs, M.; et al. Statistically supported real driving emission calibration: Using cycle generation to provide vehicle-specific and statistically representative test scenarios for Euro 7. Int. J. Engine Res. 2020, 21, 1783–1799. [Google Scholar] [CrossRef]
- Light Duty Vehicle Performance and Economy Measure Committee. Drive Quality Evaluation for Chassis Dynamometer Testing, 1st ed.; J2951_20111, 20140; SAE International: Warrendale, PA, USA, 2014. [Google Scholar]
- Kooijman, D.G.; Balau, A.E.; Wilkins, S.; Ligterink, N.; Cuelenaere, R. WLTP Random Cycle Generator. In Proceedings of the IEEE Vehicle Power and Propulsion Conference (VPPC), Montreal, QC, Canada, 19–22 October 2015; pp. 1–6. [Google Scholar]
- Tutuianu, M.; Bonnel, P.; Ciuffo, B.; Haniu, T.; Ichikawa, N.; Marotta, A.; Pavlovic, J.; Steven, H. Development of the World-wide harmonized Light duty Test Cycle (WLTC) and a possible pathway for its introduction in the European legislation. Transp. Res. Part D Transp. Environ. 2015, 40, 61–75. [Google Scholar] [CrossRef]
- Sileghem, L.; Bosteels, D.; May, J.; Favre, C.; Verhelst, S. Analysis of vehicle emission measurements on the new WLTC, the NEDC and the CADC. Transp. Res. Part D Transp. Environ. 2014, 32, 70–85. [Google Scholar] [CrossRef] [Green Version]
- MIIT. Overview of CATC Development; WP.29-172-21. 2017. Available online: https://www.slideserve.com/moonw/overview-of-catc-development-powerpoint-ppt-presentation (accessed on 14 March 2021).
- Ashtari, A.; Bibeau, E.; Shahidinejad, S. Using Large Driving Record Samples and a Stochastic Approach for Real-World Driving Cycle Construction: Winnipeg Driving Cycle. Transp. Sci. 2014, 48, 170–183. [Google Scholar] [CrossRef]
- Della Ragione, L.; Meccariello, G. Statistical approach to identify Naples city’s real driving cycle referring to the Worldwide harmonized Light duty Test Cycle (WLTC) framework. Sustain. Dev. Plan. VIII 2016, 210, 555–566. [Google Scholar] [CrossRef] [Green Version]
- Galgamuwa, U.; Perera, L.; Bandara, S. A Representative Driving Cycle for the Southern Expressway Compared to Existing Driving Cycles. Transp. Dev. Econ. 2016, 2, 22. [Google Scholar] [CrossRef] [Green Version]
- Kondaru, M.K.; Telikepalli, K.P.; Thimmalapura, S.V.; Pandey, N.K. Generating a Real World Drive Cycle–A Statistical Approach; SAE Technical Paper 2018-01-0325; SAE Headquarter: Warrendale, PA, USA, 2018. [Google Scholar] [CrossRef]
- Feldman, R.M.; Valdez-Flores, C. Applied Probability and Stochastic Processes; Springer-Verlag: Berlin/Heidelberg, Germany, 2010. [Google Scholar] [CrossRef]
- Ching, W.-K.; Huang, X.; Ng, M.K.; Siu, T.-K. Markov Chains; Springer: Boston, MA, USA, 2013; Volume 189. [Google Scholar]
- Bättig, D. Angewandte Datenanalyse; Springer: Berlin/Heidelberg, Germany, 2015; ISBN 978-3-662-43393-5. [Google Scholar]
- Grübel, R. Kombinatorische Markov-Ketten. Math. Semesterber. 2013, 60, 185–215. [Google Scholar] [CrossRef]
- Dai, Z.; Niemeier, D.; Eisinger, D. Driving Cycles: A New Cycle-Bulding Method that Better Represents Real-World Emissions; Department of Civil and Environmental Engineering, University of California: Davis, CA, USA, 2008. [Google Scholar]
- Gong, Q.; Midlam-Mohler, S.; Marano, V.; Rizzoni, G. An Iterative Markov Chain Approach for Generating Vehicle Driving Cycles. SAE Int. J. Engines 2011, 4, 1035–1045. [Google Scholar] [CrossRef]
- Al Tarooti, A.; Meyer, N.; Guse, D.; Klein, S. Driver Modeling and Simulation for RDE Testing—Effect of driver behavior on representative test results. In Proceedings of the JSAE Annual Congress (20195167), Kanagawa, Japan, 22–24 May 2019. [Google Scholar]
- Claßen, J.; Sterlepper, S.; Dorscheidt, F.; Görgen, M.; Scharf, J.; Nijs, M.; Alt, N.; Balazs, A.; Böhmer, M.; Doucet, M.; et al. RDE cycle generation—A statistical approach to cut down testing effort and provide a secure base to approve RDE legislation compliance. In Internationaler Motorenkongress; Springer Vieweg: Wiesbaden, Germany, 2019. [Google Scholar] [CrossRef]
- Mason, A.; Roberts, P.; Whelan, S.; Kondo, Y.; Brenton, L. RDE Plus—A Road to Rig Development Methodology for Complete RDE Compliance: Road to Chassis Perspective; SAE Technical Paper 2020-01-0378; SAE Headquarter: Warrendale, PA, USA, 2020. [Google Scholar] [CrossRef]
- Roberts, P.; Mason, A.; Whelan, S.; Tabata, K.; Kondo, Y.; Kumagai, T.; Mumby, R.; Bates, L. RDE Plus—A Road to Rig Development Methodology for Whole Vehicle RDE Compliance: Overview; SAE Technical Paper 2020-01-0376; SAE Headquarter: Warrendale, PA, USA, 2020. [Google Scholar] [CrossRef]
- Roberts, P.J.; Mumby, R.; Mason, A.; Redford-Knight, L.; Kaur, P. RDE Plus—The Development of a Road, Rig and Engine-in-the-Loop Test Methodology for Real Driving Emissions Compliance; SAE Technical Paper 2019-01-0756; SAE Headquarter: Warrendale, PA, USA, 2019. [Google Scholar] [CrossRef]
- Kim, K.; Chung, W.; Kim, M.; Kim, C.; Myung, C.-L.; Park, S. Inspection of PN, CO2, and Regulated Gaseous Emissions Characteristics from a GDI Vehicle under Various Real-World Vehicle Test Modes. Energies 2020, 13, 2581. [Google Scholar] [CrossRef]
- Maschmeyer, H. Systematische Bewertung Verbrennungsmotorischer Antriebssysteme Hinsichtlich ihrer Realfahrtemissionen am Motorenprüfstand. Master’s Thesis, Technische Universität, Darmstadt, Germany, 2017. [Google Scholar]
- Baumgarten, H.; Scharf, J.; Thewes, M.; Uhlmann, T.; Balazs, A.; Böhmer, M. Simulationsbasierte Entwicklungsmethode für zukünftige Abgasemissionsgesetzgebung/Simulation-Based Development Methodology for Future Emission Legislation. In 37. Internationales Wiener Motorensymposium 28–29 April 2016; VDI Verlag GmbH: Düsseldorf, Germany, 2016; p. I-209. [Google Scholar]
- Faubel, L.; Lensch-Franzen, C.; Schuhardt, A.; Krohn, C. Übertrag von RDE-Anforderungen in eine modellbasierte Prüfstandsumgebung. MTZextra 2016, 21, 44–49. [Google Scholar] [CrossRef]
- Maschmeyer, H.; Beidl, C.; Düser, T.; Schick, B. RDE-Homologation—Herausforderungen, Lösungen und Chancen. MTZ Mot. Z. 2016, 77, 84–91. [Google Scholar] [CrossRef]
- Maschmeyer, H.; Kluin, M.; Beidl, C. Real Driving Emissions—Ein Paradigmenwechsel in der Entwicklung. MTZ Mot. Z. 2015, 76, 36–41. [Google Scholar] [CrossRef]
- Mayr, C.; Merl, R.; Gigerl, H.-P.; Teitzer, M.; König, D.; Stemmer, D.; Retter, F. Test emissionsrelevanter Fahrzyklen auf dem Motorprüfstand. In Simulation und Test 2018; Metzler, J.B., Ed.; Springer: Wiesbaden, Germany, 2019; pp. 107–125. [Google Scholar]
- Nies, H.; Beidl, C.; Hüners, H.; Fischer, K. Systematische Entwicklungsmethodik für eine robuste Motorkalibrierung unter RDE-Randbedingungen; Springer Nature: Cham, Switzerland, 2020; Volume 76, pp. 50–62. [Google Scholar]
- Donateo, T.; Giovinazzi, M. Building a cycle for Real Driving Emissions. Energy Procedia 2017, 126, 891–898. [Google Scholar] [CrossRef]
- Donn, C.; Zulehner, W.; Pfister, F. Realfahrtests für die Antriebsentwicklung mithilfe des virtuellen Fahrversuchs. ATZextra 2019, 24, 44–49. [Google Scholar] [CrossRef]
- Hipp, J.; Schmidt, D.; Bauer, S.; Steinhaus, T.; Beidl, C. Methodikbaukasten zur effizienten, zielgerichteten RDE-Entwicklung—Potenziale und Perspektiven. In Simulation und Test 2018; Metzler, J.B., Ed.; Springer: Wiesbaden, Germany, 2019; pp. 127–146. [Google Scholar]
- Knopov, P.S.; Samosonok, A.S. On Markov stochastic processes with local interaction for solving some applied problems. Cybern. Syst. Anal. 2011, 47, 346–359. [Google Scholar] [CrossRef]
- Xia, F.; Dorscheidt, F.; Lücke, S.; Andert, J.; Gardini, P.; Scheel, T.; Walter, V.; Tharmakulasingam, J.K.R.; Böhmer, M.; Nijs, M. Experimental Proof-of-Concept of HiL Based Virtual Calibration for a Gasoline Engine with a Three-Way-Catalyst; SAE Technical Paper 2019-01-2301; SAE Headquarter: Warrendale, PA, USA, 2019. [Google Scholar] [CrossRef]
- Dorscheidt, F.; Düzgün, M.; Claßen, J.; Krysmon, S.; Pischinger, S.; Görgen, M.; Dönitz, C.; Nijs, M. Hardware-in-the-Loop Based Virtual Emission Calibration for a Gasoline Engine; SAE Technical Paper 2021-01-0417; SAE Headquarter: Warrendale, PA, USA, 2021. [Google Scholar] [CrossRef]
- Krysmon, S.; Bonnaventure R de Baroud, W.; Kluge, K. FEV Spectrum 71(3). FEV’s Modern X-in-the-Loop-Test Benches for Hybrid Power-Trains. 2020. Available online: http://p228187.webspaceconfig.de/mailing/Spectrum/Spectrum_EN_latest-issue.pdf (accessed on 3 April 2021).
- Görgen, M.; Nijs, M.; Thewes, M.; Balazs, A.; Yadla, S.; Scharf, J.; Uhlmann, T.; Claßen, J.; Dorscheidt, F.; Krysmon, S.; et al. Holistic Hybrid RDE Calibration Methodology for EU7. In Proceedings of the Internationaler Motorenkongress 2021, Baden Baden, Germany, 23–24 February 2021. [Google Scholar]
- Heusch, C.; Guse, D.; Dorscheidt, F.; Claßen, J.; Fahrbach, T.; Pischinger, S.; Tegelkamp, S.; Görgen, M.; Nijs, M.; Scharf, J. Analysis of Drivability Influence on Tailpipe Emissions in Early Stages of a Vehicle Development Program by Means of Engine-in-the-Loop Test Benches; SAE Technical Paper 2020-01-0373; SAE Headquarter: Warrendale, PA, USA, 2020. [Google Scholar] [CrossRef]
- Lee, S.-Y.; Andert, J.; Neumann, D.; Querel, C.; Scheel, T.; Aktas, S.; Miccio, M.; Schaub, J.; Koetter, M.; Ehrly, M. Hardware-in-the-Loop-Based Virtual Calibration Approach to Meet Real Driving Emissions Requirements; SAE Technical Paper 2018-01-0869; SAE Headquarter: Warrendale, PA, USA, 2018. [Google Scholar] [CrossRef]
- Guse, D.; Andert, J.; Walter, S.; Meyer, N. Next Level of Testing—Extended Frontloading through Latency-optimized EiL Test Benches. MTZ Worldw. 2020, 81, 44–49. [Google Scholar] [CrossRef]
- Guse, D.; Claßen, J.; Kumagai, T.; Ueda, N.; Scharf, J.; Nijs, M.; Balasz, A.; Görgen, M. Powertrain development frontloading for RDE compliance—Part 2: Robust RDE compliant PN emissions calibration at Engine-in-the-Loop test bench. In Proceedings of the JSAE, Kanagawa, Japan, 23–25 May 2018. [Google Scholar]
- Guse, D.; Heusch, C.; Klein, S.; Fahrbach, T.; Andert, J.; Pischinger, S.; Tegelkamp, S.; Nijs, M.; Scharf, J. Objectified Evaluation and Classification of Passenger Vehicles Longitudinal Drivability Capabilities in Automated Load Change Drive Maneuvers at Engine-in-the-Loop Test Benches; SAE Technical Paper 2020-01-0245; SAE Headquarter: Warrendale, PA, USA, 2020. [Google Scholar] [CrossRef]
- Gerstenberg, J.; Hartlief, H.; Tafel, S. RDE-Entwicklungsumgebung am hochdynamischen Motorprüfstand. ATZextra 2015, 20, 36–41. [Google Scholar] [CrossRef]
- Rabiner, L.; Rosenberg, A.; Levinson, S. Considerations in dynamic time warping algorithms for discrete word recognition. IEEE Trans. Acoust. Speech Signal Process. 1978, 26, 575–582. [Google Scholar] [CrossRef]
- Krysmon, S.; Dorscheidt, F.; Claßen, J.; Düzgün, M.; Pischinger, S. Real Driving Emissions—Conception of a Data-driven Calibration Methodology for Hybrid Powertrains Combining Statistical Analysis and Virtual Calibration Platforms. in preparation.








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Claßen, J.; Krysmon, S.; Dorscheidt, F.; Sterlepper, S.; Pischinger, S. Real Driving Emission Calibration—Review of Current Validation Methods against the Background of Future Emission Legislation. Appl. Sci. 2021, 11, 5429. https://doi.org/10.3390/app11125429
Claßen J, Krysmon S, Dorscheidt F, Sterlepper S, Pischinger S. Real Driving Emission Calibration—Review of Current Validation Methods against the Background of Future Emission Legislation. Applied Sciences. 2021; 11(12):5429. https://doi.org/10.3390/app11125429
Chicago/Turabian StyleClaßen, Johannes, Sascha Krysmon, Frank Dorscheidt, Stefan Sterlepper, and Stefan Pischinger. 2021. "Real Driving Emission Calibration—Review of Current Validation Methods against the Background of Future Emission Legislation" Applied Sciences 11, no. 12: 5429. https://doi.org/10.3390/app11125429
APA StyleClaßen, J., Krysmon, S., Dorscheidt, F., Sterlepper, S., & Pischinger, S. (2021). Real Driving Emission Calibration—Review of Current Validation Methods against the Background of Future Emission Legislation. Applied Sciences, 11(12), 5429. https://doi.org/10.3390/app11125429