
An Accelerated Slicing Algorithm for Frep Models



Abstract
:1. Introduction
- 1.
- A novel compound adaptive criterion for contour construction during the slicing of FRep models satisfying Equation (2) is presented. It localizes an FRep surface in 3D space, thereby reducing the number of processed cells during the implementation of the contouring method.
- 2.
- A novel acceleration criterion for contour construction during the slicing of FRep models satisfying Equation (2) is presented. It allows the replacement of the loop operation by the spatial search operation and reduces the number of iterations needed during the computation of the defining function of the FRep model.
- 3.
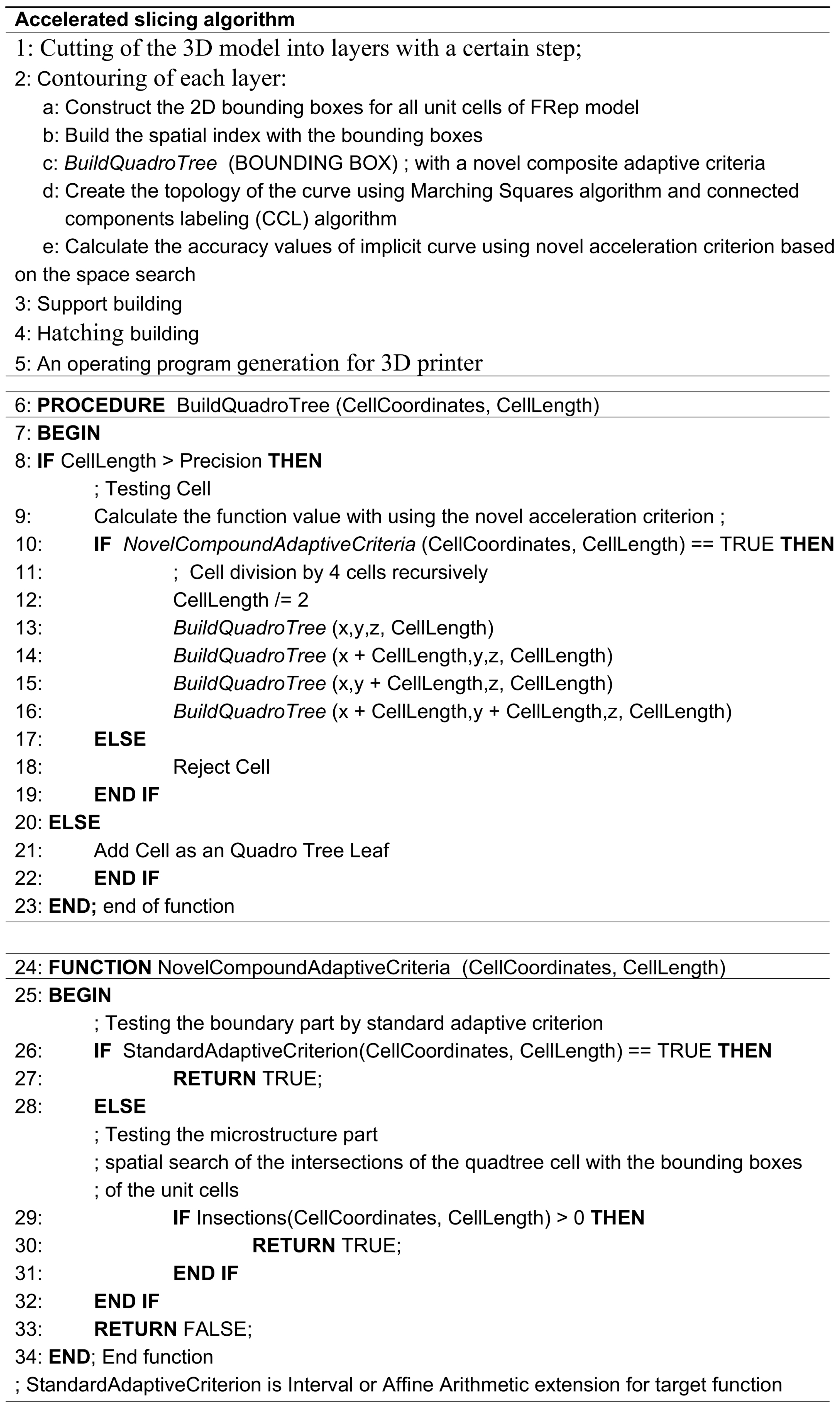
- An accelerated slicing algorithm for FRep models satisfying Equation (2) is presented. It is used for obtaining 2D contours in each sliced layer of FRep models with complex geometries based on the repetition of a unit cell satisfying Equation (2). The algorithm is built into the CAM system for FRep models and reduces the time needed for slicing by applying the novel compound adaptive criterion and the novel acceleration criterion.
2. Materials and Methods
2.1. Function Representation in 3D Modelling
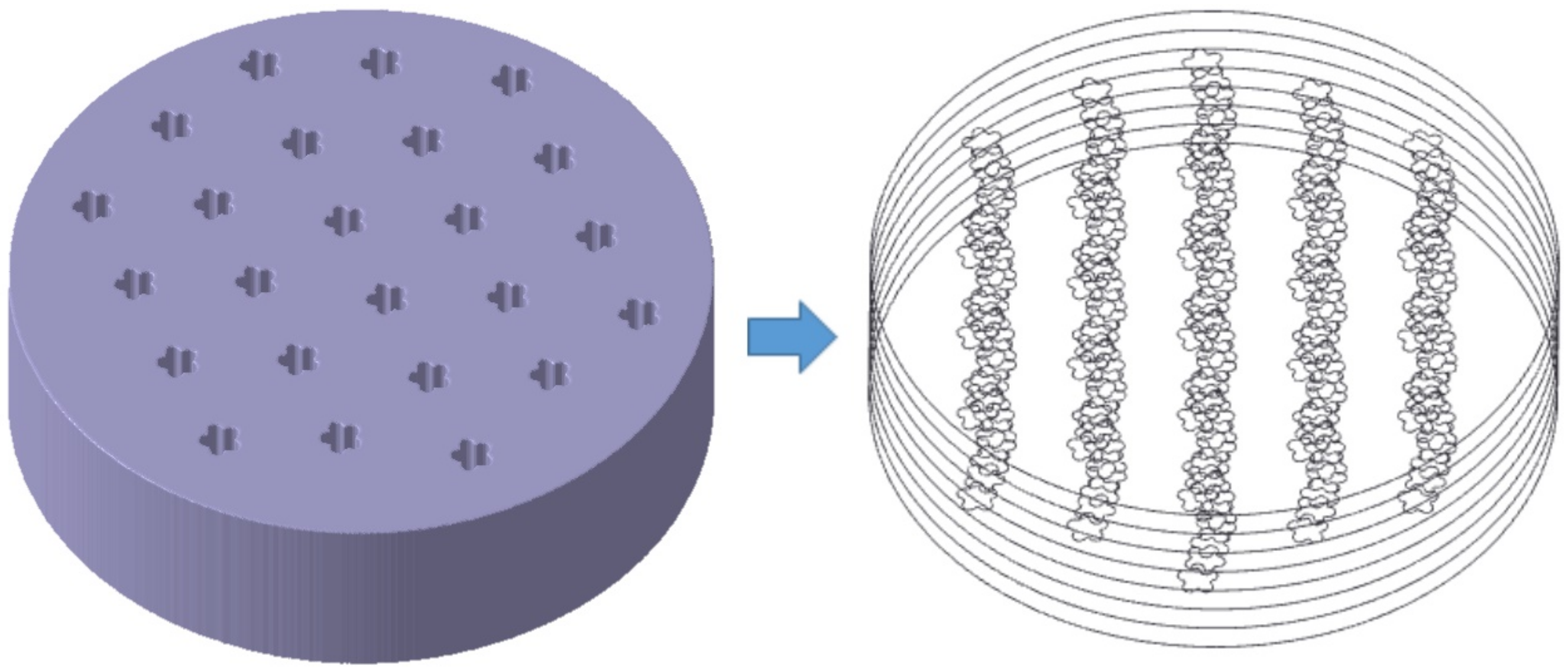
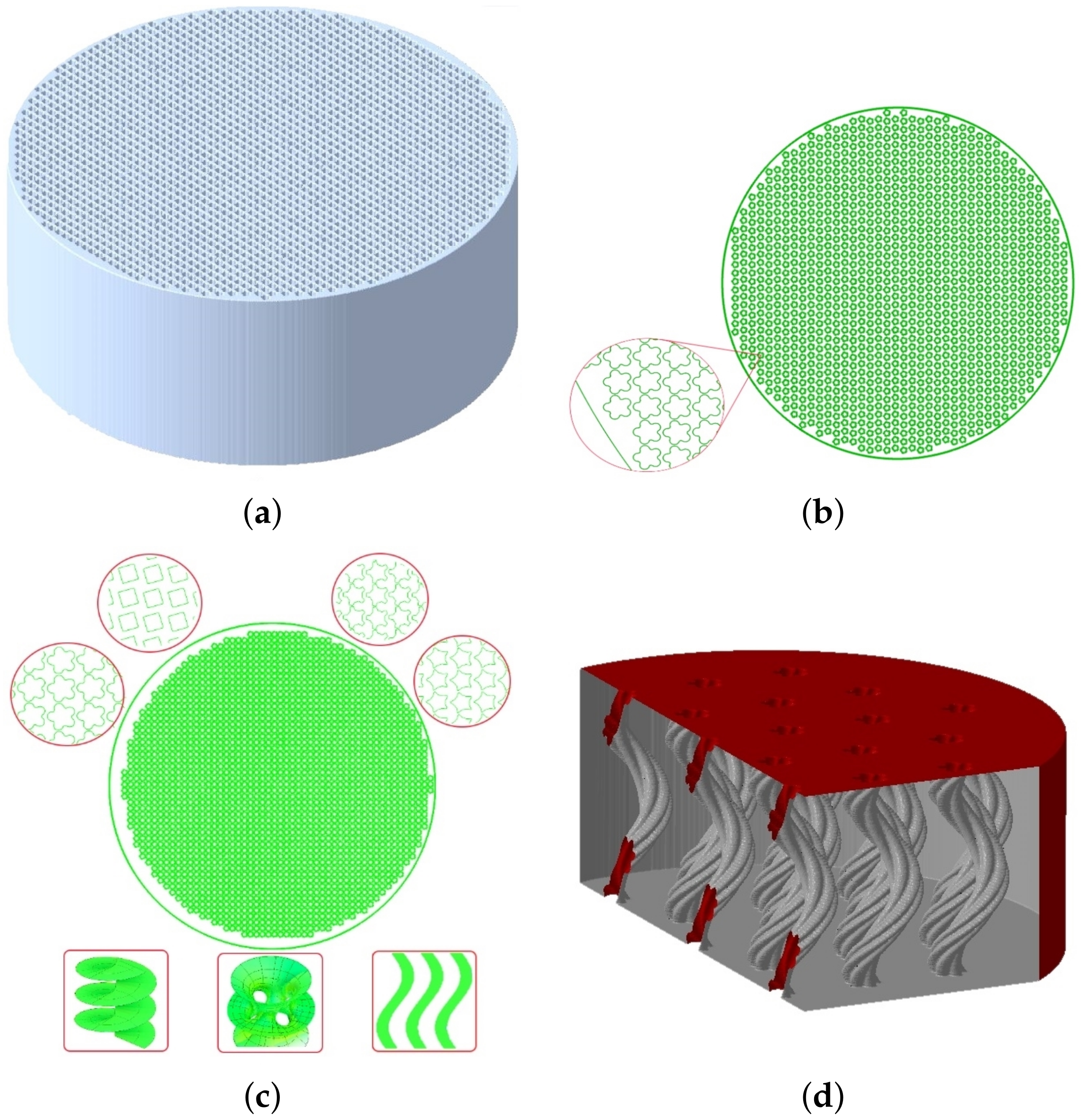
2.2. Microstructure Modelling
2.3. K-d Trees
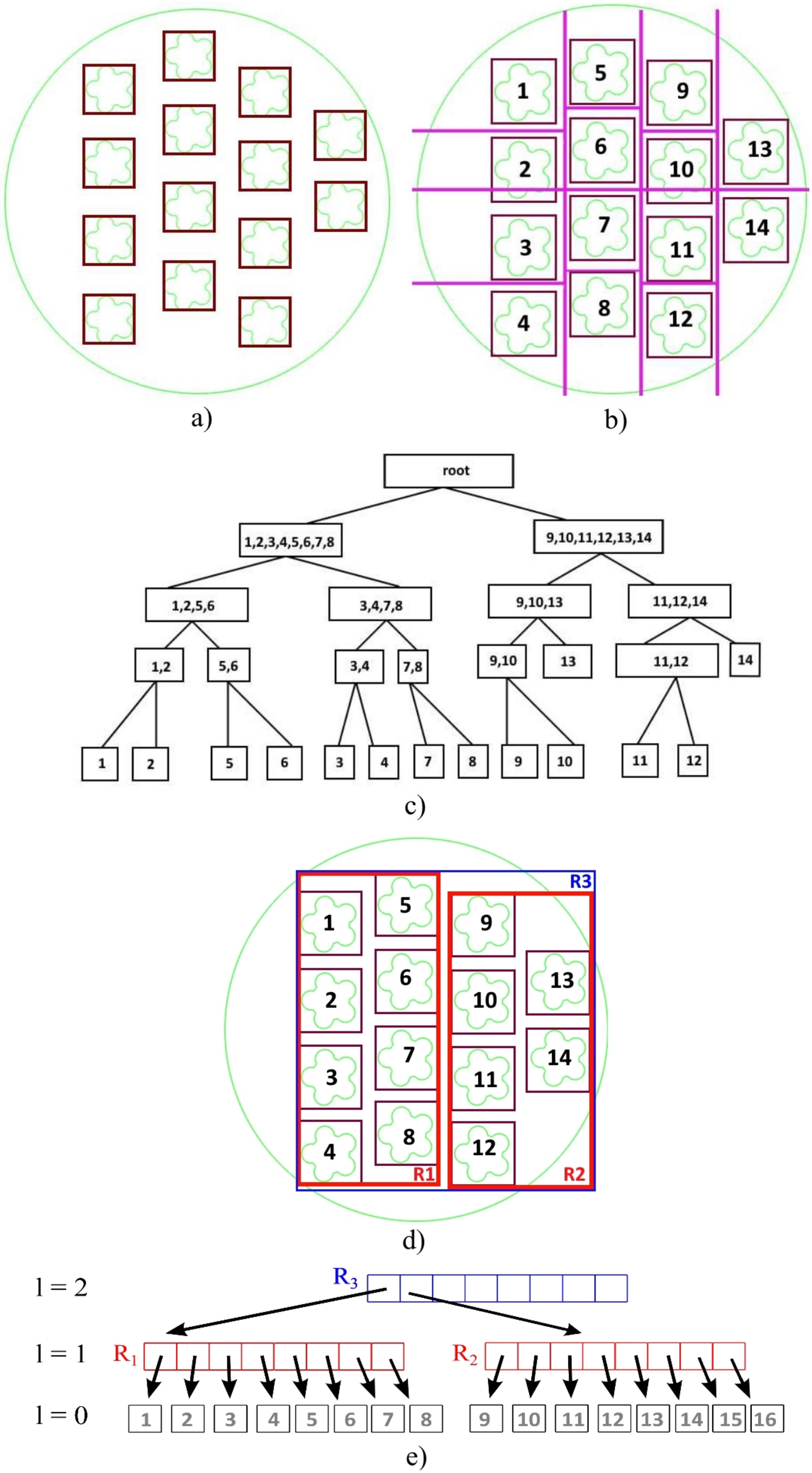
2.4. R-Trees
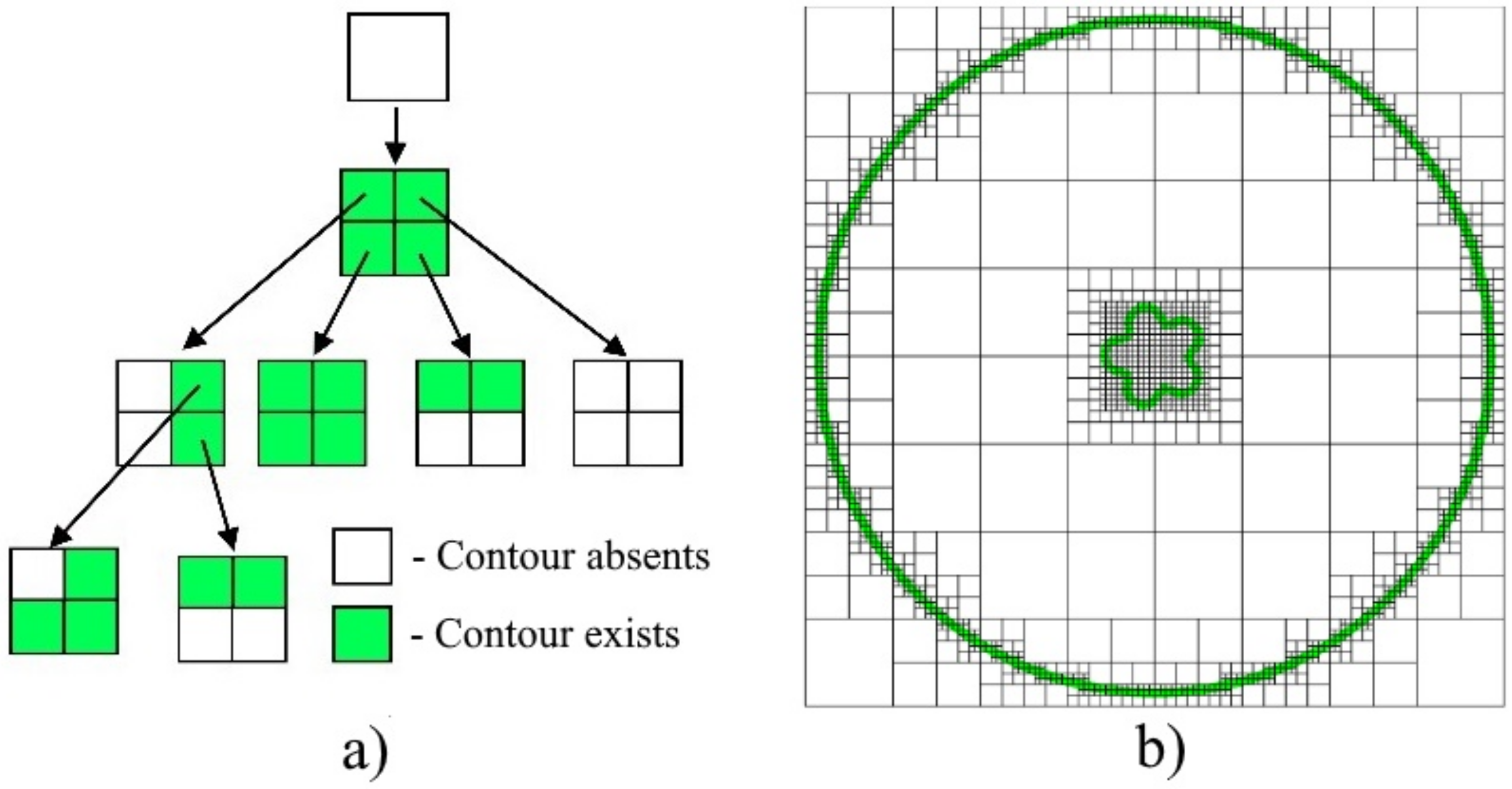
2.5. Quadtrees
3. An Accelerated Slicing Algorithm
- 1.
- Cutting the 3D model into layers with a certain step.
- 2.
- Contouring each layer.
- 3.
- Post-processing the obtained contours with support and hatching building.
- 4.
- Generating the operating program for a certain 3D printer.
- 1.
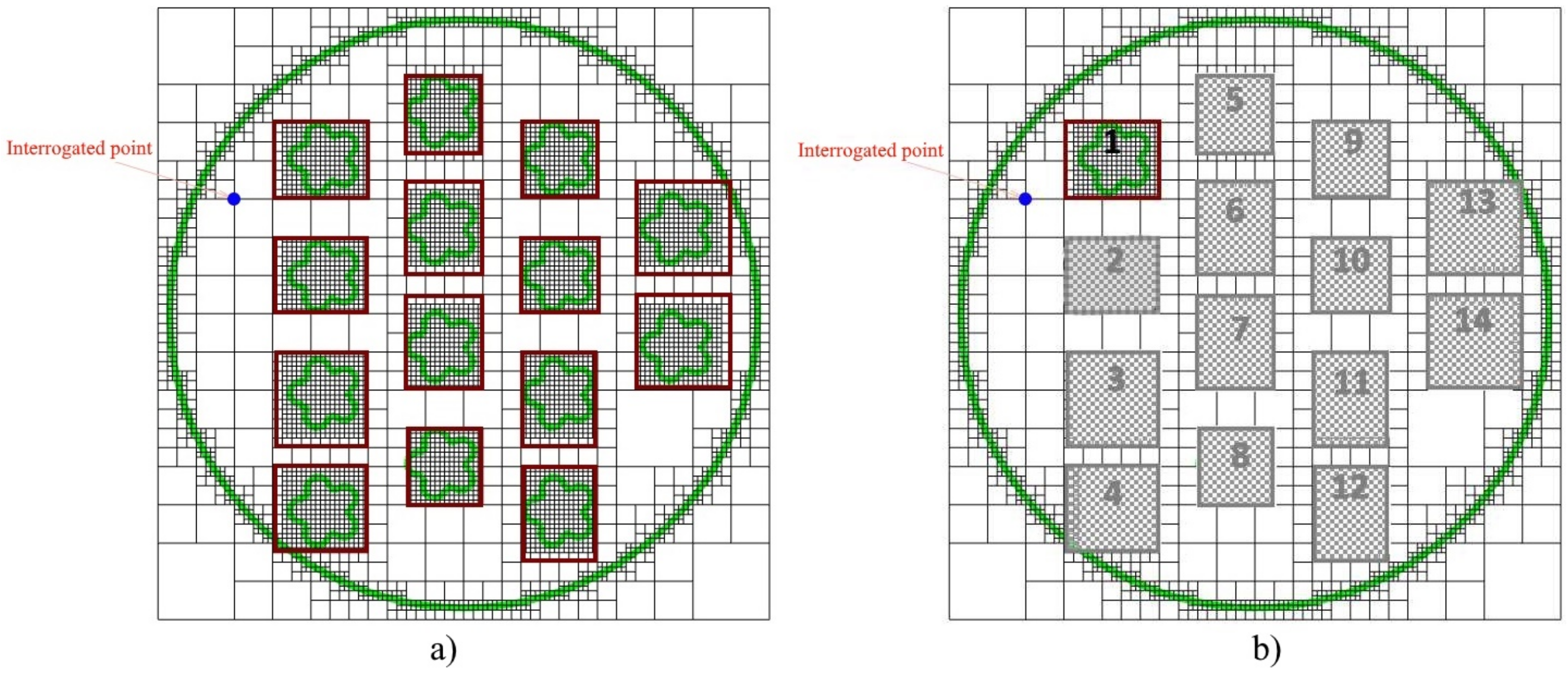
- Constructing the 2D bounding boxes for all the unit cells of the FRep model (Figure 3a red rectangles).
- 2.
- Building the spatial index structure with the precalculated bounding boxes of the unit cells in each layer of the sliced 3D model (Figure 3).
- 3.
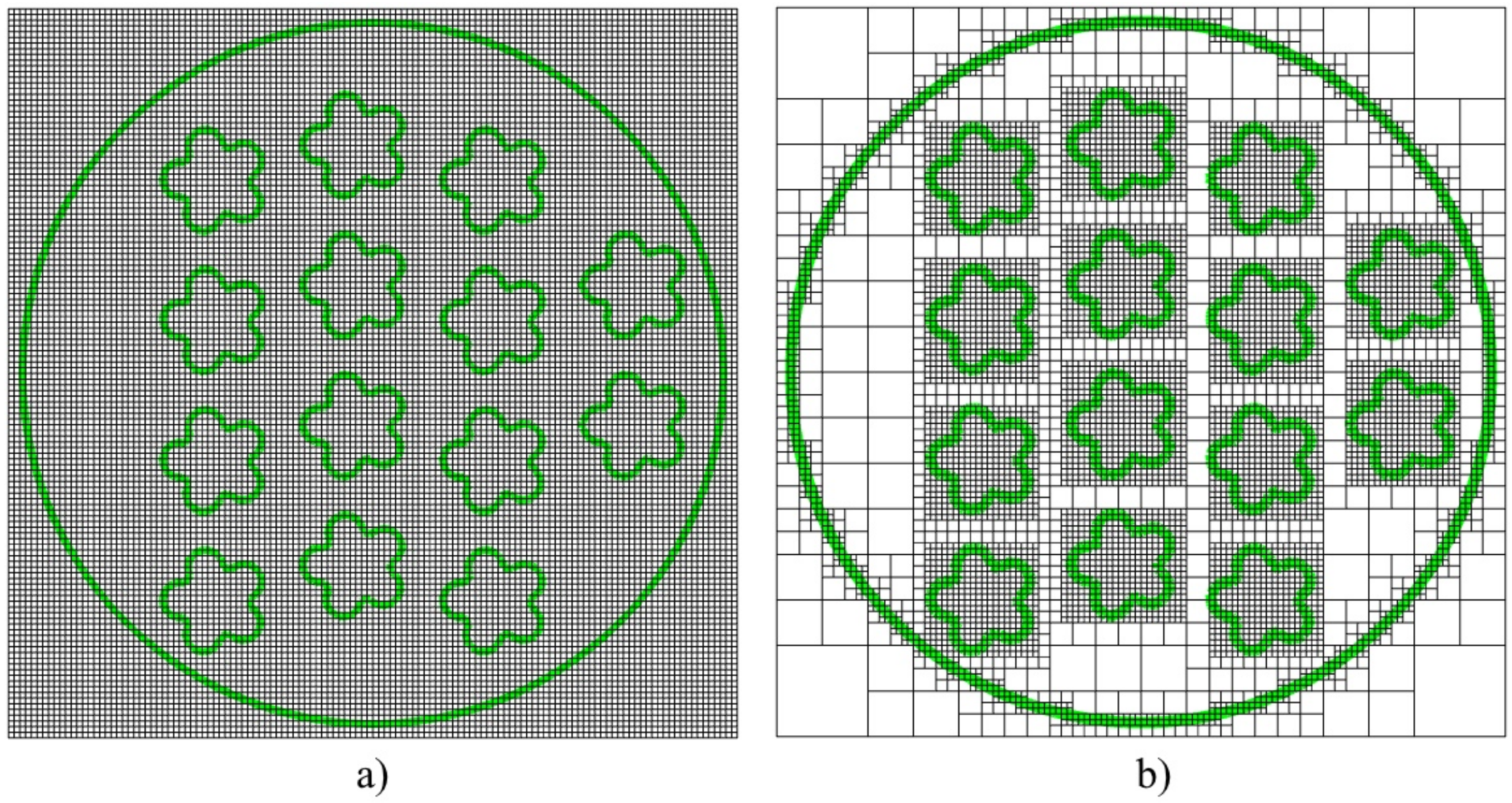
- Applying the novel compound adaptive criterion based on the spatial query during quadtree construction for the FRep model (Figure 2a).
- 4.
- Applying the novel acceleration criterion based on the spatial search during calculating the defining function at every point of interest in the space.
- 5.
- Creating the topology of the curve using the MS algorithm and the connected component labelling (CCL) algorithm [43].
- 6.
- Calculating the exact values of the implicit curve on the edges of adjacent cells using numerical methods for solving nonlinear equations.
3.1. Novel Compound Adaptive Criterion
3.2. Novel Acceleration Criterion
4. Results
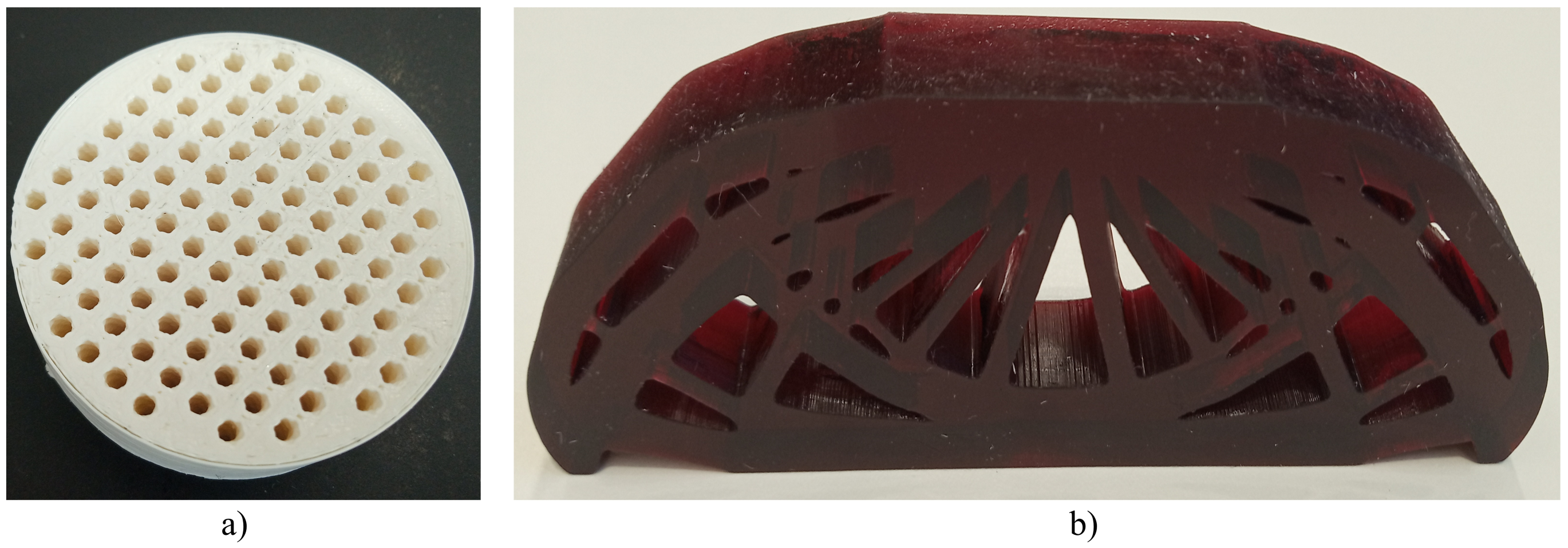
4.1. Case Study 1: Slicing of a Filter Model
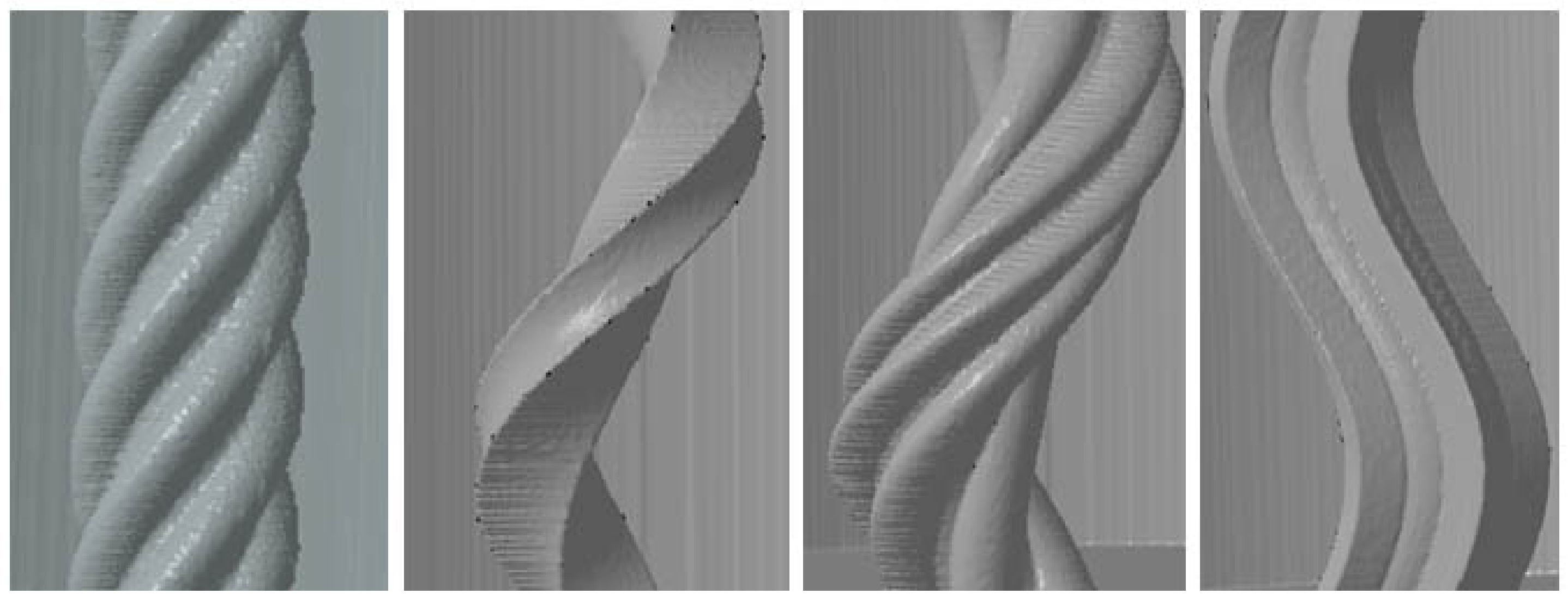
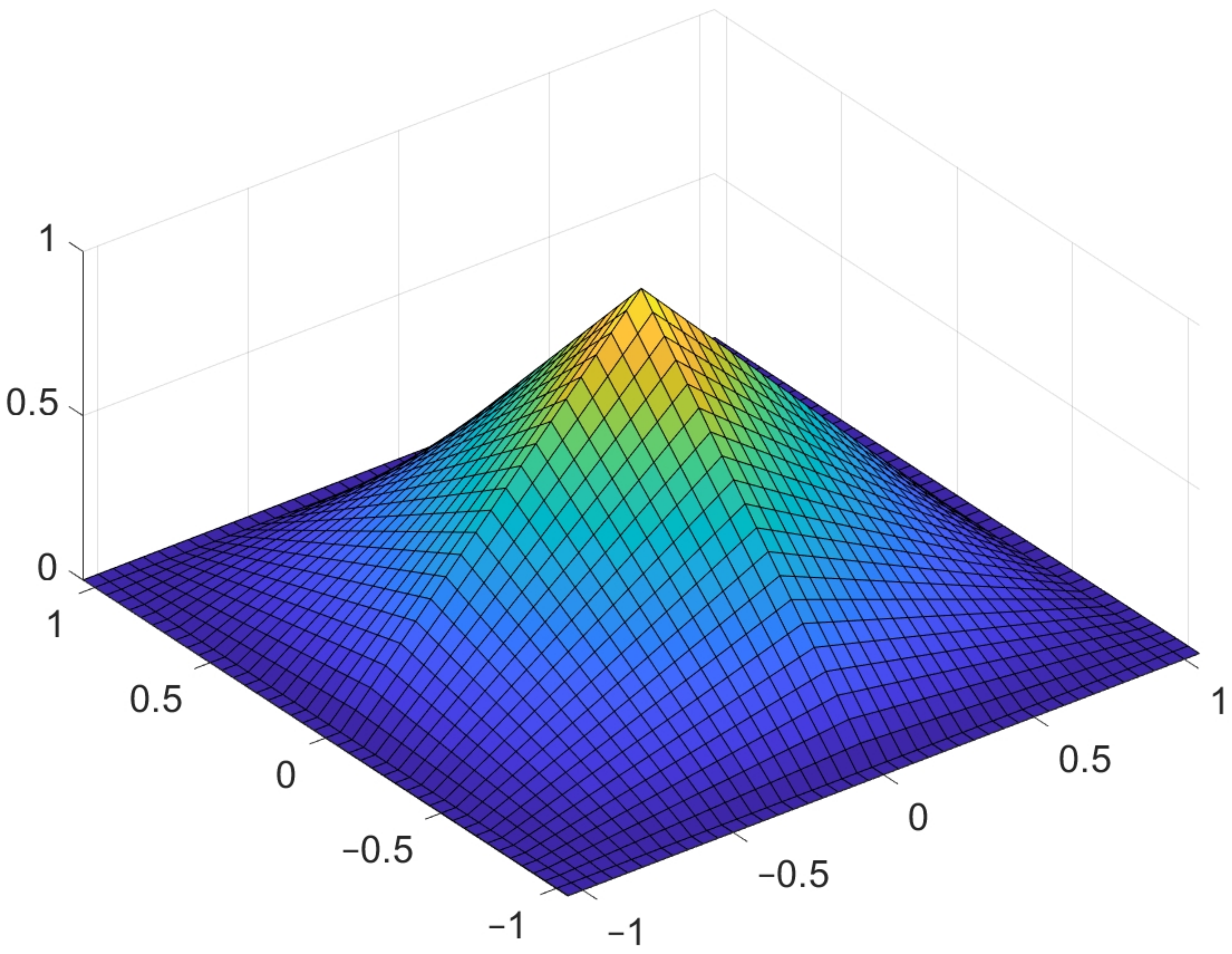
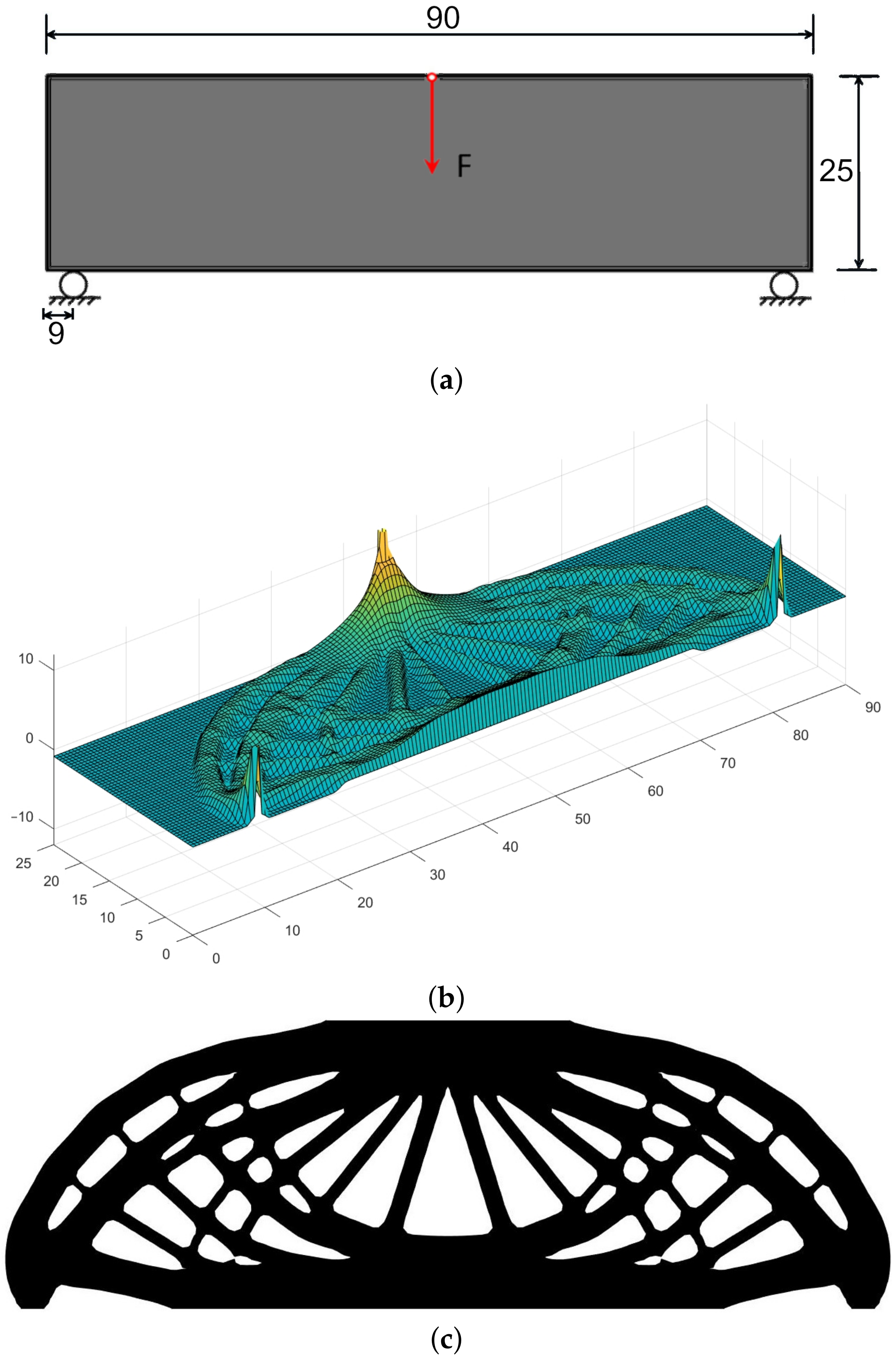
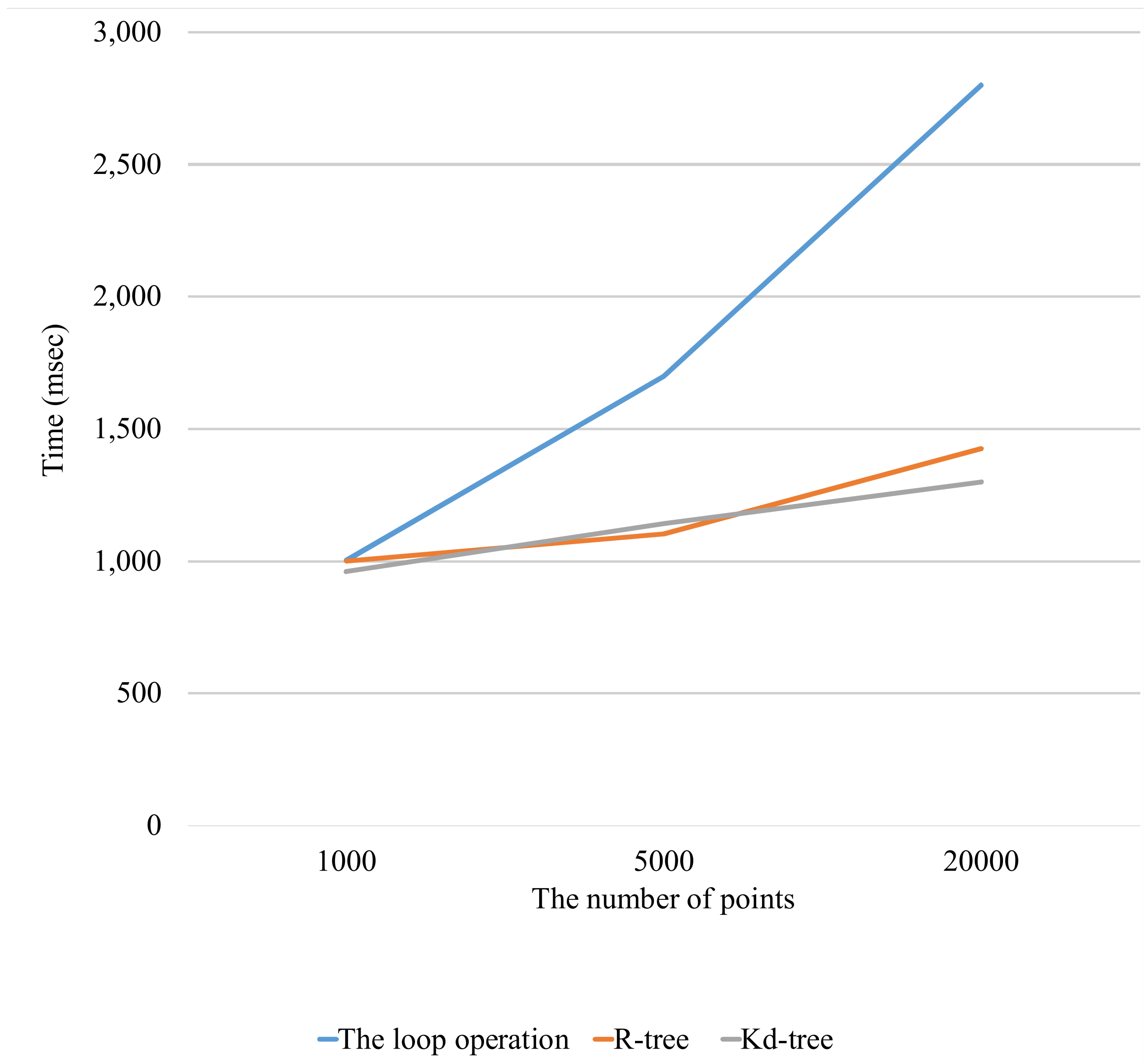
4.2. Case Study 2: Slicing of a Free-Form Model
5. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Roscoe, L. Stereolithography interface specification. In Stereolithography Interface Specification; 3D Systems Inc.: Valencia, CA, USA, 1988. [Google Scholar]
- Burns, M. Automated Fabrication: Improving Productivity in Manufacturing; PTR Prentice Hall: Englewood Cliffs, NJ, USA, 1993. [Google Scholar]
- 3MF-Consortium. 3Mf Format Specification; 3MF-Consortium: Wakefield, MA, USA, 2020. [Google Scholar]
- Pasko, A.; Adzhiev, V.; Sourin, A.; Savchenko, V. Function representation in geometric modeling: Concepts, implementation and applications. Vis. Comput. 1995, 11, 429–446. [Google Scholar] [CrossRef]
- Steuben, J.C.; Iliopoulos, A.P.; Michopoulos, J.G. Implicit slicing for functionally tailored additive manufacturing. Comput. Aided Des. 2016, 77, 107–119. [Google Scholar] [CrossRef]
- Chen, M.; Tucker, J.V. Constructive Volume Geometry. Comput. Graph. Forum 2000, 19, 281–293. [Google Scholar] [CrossRef] [Green Version]
- Rvachev, V.L. Theory of R-Functions and Some Applications; Naukova Dumka: Kyiv, Ukraine, 1982. [Google Scholar]
- Pasko, A.; Fryazinov, O.; Vilbrandt, T.; Fayolle, P.; Adzhiev, V. Procedural function-based modelling of volumetric microstructures. Graph. Model. 2011, 73, 165–181. [Google Scholar] [CrossRef] [Green Version]
- Schwarz, H. Gesammelte Mathematische Abhandlungen; Springer: Berlin/Heidelberg, Germany, 1890. [Google Scholar] [CrossRef] [Green Version]
- Pasko, G.; Pasko, A.; Ikeda, M.; Kunii, T. Bounded blending operations. In Proceedings of the SMI Shape Modeling International 2002, Banff, AB, Canada, 17–22 May 2002; pp. 95–103. [Google Scholar] [CrossRef]
- Safonov, A.; Maltsev, E.; Chugunov, S.; Tikhonov, A.; Konev, S.; Evlashin, S.; Popov, D.; Pasko, A.; Akhatov, I. Design and Fabrication of Complex-Shaped Ceramic Bone Implants via 3D Printing Based on Laser Stereolithography. Appl. Sci. 2020, 10, 7138. [Google Scholar] [CrossRef]
- Sanchez, M.; Fryazinov, O.; Fayolle, P.; Pasko, A. Convolution Filtering of Continuous Signed Distance Fields for Polygonal Meshes. Comput. Graph. Forum 2015, 34, 277–288. [Google Scholar] [CrossRef] [Green Version]
- Weisstein, E.W. Sawtooth Wave. In MathWorld—A Wolfram Web Resource. 2010. Available online: https://mathworld.wolfram.com/SawtoothWave.html (accessed on 5 March 2021).
- Weisstein, E.W. Triangle Wave. In MathWorld—A Wolfram Web Resource. 2010. Available online: https://mathworld.wolfram.com/TriangleWave.html (accessed on 5 March 2021).
- Fryazinov, O.; Vilbrandt, T.; Pasko, A. Multi-scale space-variant FRep cellular structures. Comput. Aided Des. 2013, 45, 26–34. [Google Scholar] [CrossRef] [Green Version]
- Stolte, N.; Kaufman, A. Parallel Spatial Enumeration of Implicit Surfaces using Interval Arithmetic for Octree Generation and its direct Visualization. In Proceedings of the Implicit Surfaces’98, Seattle, WA, USA, 15–16 June 1998; pp. 81–87. [Google Scholar]
- Stolfi, J.; De Figueiredo, L. An introduction to affine arithmetic. Trends Appl. Comput. Math. 2003, 4, 297–312. [Google Scholar] [CrossRef]
- Fryazinov, O.; Pasko, A.; Comninos, P. Fast Reliable Interrogation of Procedurally Defined Implicit Surfaces Using Extended Revised Affine Arithmetic. Comput. Graph. 2010, 34, 708–718. [Google Scholar] [CrossRef] [Green Version]
- Popov, D.; Maltsev, E.; Fryazinov, O.; Pasko, A.; Akhatov, I. Efficient contouring of functionally represented objects for additive manufacturing. Comput. Aided Des. 2020. [Google Scholar] [CrossRef]
- Bühler, K. Implicit linear interval estimations. In Proceedings of the 18th Spring Conference on Computer Graphics, Budmerice, Slovakia, 24–27 April 2002; pp. 123–132. [Google Scholar] [CrossRef]
- Havran, V.; Bittner, J. On Improving KD-Trees for Ray Shooting. In Proceedings of the WSCG 2002 Conference, Plzen-Bory, Czech Republic, 4–8 February 2002; pp. 209–217. [Google Scholar]
- Foley, T.; Sugerman, J. KD-Tree Acceleration Structures for a GPU Raytracer. In Proceedings of the ACM SIGGRAPH/EUROGRAPHICS Conference on Graphics Hardware, Los Angeles, CA, USA, 30–31 July 2005; pp. 15–22. [Google Scholar] [CrossRef]
- Wen, P.; Xiaojun, W.; Gao, T.; Wu, C. Kd-Tree Based OLS in Implicit Surface Reconstruction with Radial Basis Function. In Proceedings of the International Conference on Artificial Reality and Telexistence: Advances in Artificial Reality and Tele-Existence, Hangzhou, China, 29 November–1 December 2006; Volume 4282, pp. 861–870. [Google Scholar] [CrossRef]
- Feldmann, D. Accelerated ray tracing using R-trees. In Proceedings of the GRAPP 2015–10th International Conference on Computer Graphics Theory and Applications, Berlin, Germany, 11–14 March 2015; pp. 247–257. [Google Scholar]
- Wang, L.; Yu, Y.; Zhou, K.; Guo, B. Multiscale Vector Volumes. ACM Trans. Graph. 2011, 30, 1–8. [Google Scholar] [CrossRef]
- Gourmel, O.; Pajot, A.; Paulin, M.; Barthe, L.; Poulin, P. Fitted BVH for Fast Raytracing of Metaballs. Comput. Graph. Forum 2010, 29. [Google Scholar] [CrossRef] [Green Version]
- Bentley, J. Multidimensional Binary Search Trees Used for Associative Searching. Commun. ACM 1975, 18, 509–517. [Google Scholar] [CrossRef]
- MacDonald, J.; Booth, K. Heuristics for ray tracing using space subdivision. Vis. Comput. 1990, 6, 153–166. [Google Scholar] [CrossRef]
- Havran, V. Heuristic Ray Shooting Algorithms. Ph.D. Thesis, Czech Technical University, Prague, Czech Republic, 2000. [Google Scholar]
- Havran, V.; Kopal, T.; Bittner, J.; Zara, J. Fast Robust BSP Tree Traversal Algorithm For Ray Tracing. J. Graph. Tools 1998. [Google Scholar] [CrossRef]
- Guttman, A. R Trees: A Dynamic Index Structure for Spatial Searching. Sigmod Rec. 1984, 14, 47–57. [Google Scholar] [CrossRef]
- Sellis, T. Efficiently supporting procedures in relational database systems. In Proceedings of the 1987 ACM SIGMOD International Conference on Management of Data, San Francisco, CA, USA, 27–29 May 1987; pp. 278–291. [Google Scholar]
- Beckmann, N.; Kriegel, H.; Schneider, R.; Seeger, B. The R*-Tree: An Efficient and Robust Access Method for Points and Rectangles. In Proceedings of the 1990 ACM SIGMOD International Conference on Management of Data, Atlantic City, NJ, USA, 23–26 May 1990; pp. 322–331. [Google Scholar] [CrossRef] [Green Version]
- Beckmann, N.; Seeger, B. A revised R*-tree in comparison with related index structures. In Proceedings of the International Conference on Management of Data, Providence, RI, USA, 29 June–2 July 2009; pp. 799–812. [Google Scholar]
- Finkel, R.; Bentley, J. Quad trees: A data structure for retrieval on composite keys. Acta Inform. 1974, 4, 1–9. [Google Scholar] [CrossRef]
- Klinger, A.; Dyer, C. Experiments on picture representation using regular decomposition. Comput. Graph. Image Process. 1976, 5, 68–105. [Google Scholar] [CrossRef]
- Song, Y.; Yang, Z.; Liu, Y.; Deng, J. Function representation based slicer for 3D printing. Comput. Aided Geom. Des. 2018, 62, 276–293. [Google Scholar] [CrossRef]
- Jamieson, R.; Hacker, H. Direct slicing of CAD models for rapid prototyping. Rapid Prototyp. J. 1995, 1, 4–12. [Google Scholar] [CrossRef]
- Chen, Y.; Li, K.; Qian, X. Direct Geometry Processing for Telefabrication. J. Comput. Inf. Sci. Eng. 2013, 13. [Google Scholar] [CrossRef]
- Maple, C. Geometric design and space planning using the marching squares and marching cube algorithms. In Proceedings of the 2003 International Conference on Geometric Modeling and Graphics, London, UK, 16–18 July 2003; pp. 90–95. [Google Scholar] [CrossRef]
- Moore, R. Interval Analysis; Prentice-Hall: Englewood Cliff, NJ, USA, 1966. [Google Scholar]
- Sunaga, T. Theory of an interval algebra and its application to numerical analysis. Jpn. J. Ind. Appl. Math. 2009, 26, 125–143. [Google Scholar] [CrossRef]
- Shapiro, L. Connected Component Labeling and Adjacency Graph Construction. Mach. Intell. Pattern Recognit. 1996, 19, 1–30. [Google Scholar] [CrossRef]
- Gehrels, B.; Lalande, B.; Loskot, M.; Wulkiewicz, A. Boost Library. 2009. Available online: https://www.boost.org/ (accessed on 5 March 2021).
- ALGLIB-Project. Data Processing Library; ALGLIB-Project: Nizhny Novgorod, Russia, 1999. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Unit Cells (Channels) | Number of Processed Cells | Reducing % of the Processed Cells | |
|---|---|---|---|
| Common Adaptive Criterion | Novel Compound Adaptive Criterion | ||
| 500 | 362,479 | 244,989 | 33 |
| 1000 | 362,479 | 249,269 | 32 |
| 2200 | 362,479 | 250,129 | 31 |
| Channel Diameter (mm) | Number of Channels | Slicing Time (ms) | ||
|---|---|---|---|---|
| Slicing with the Full Loop Operation | Accelerated Slicing Algorithm | |||
| R-Tree | K-d Tree | |||
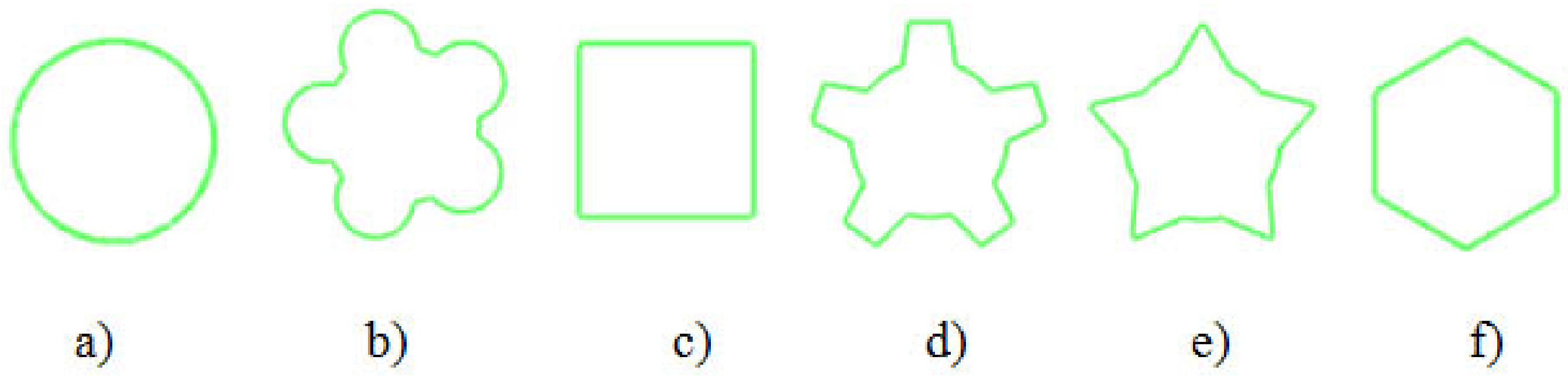
| circle | ||||
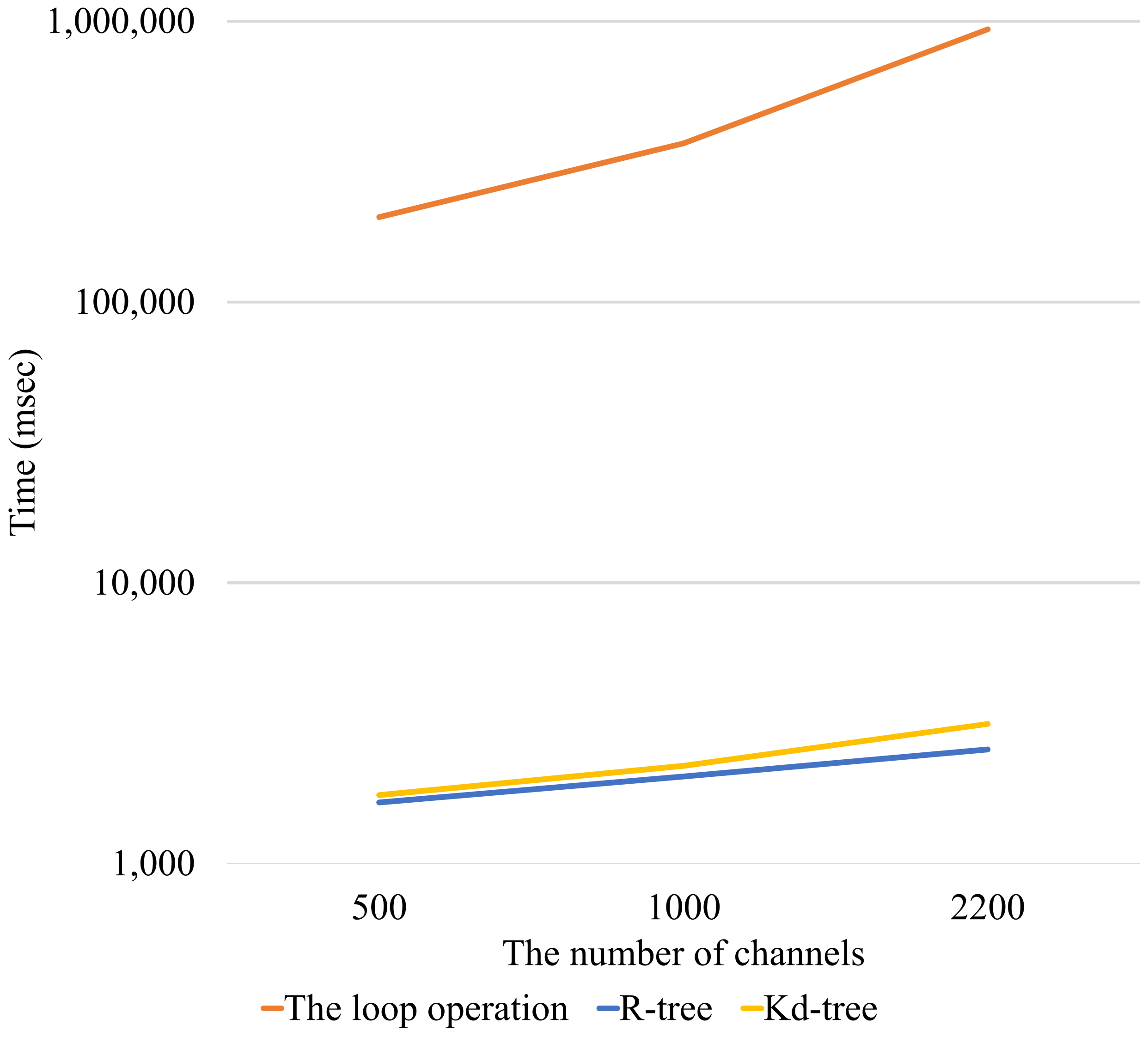
| 1.8 | 500 | 63,552 | 1273 | 1222 |
| 1.5 | 1000 | 99,944 | 1351 | 1310 |
| 0.9 | 2200 | 297,326 | 1683 | 1779 |
| circle with petals | ||||
| 1.8 | 500 | 200,530 | 1651 | 1754 |
| 1.5 | 1000 | 367,219 | 2042 | 2230 |
| 0.9 | 2200 | 936,803 | 2550 | 3145 |
| square | ||||
| 1.8 | 500 | 82,073 | 1432 | 1875 |
| 1.5 | 1000 | 124,205 | 1550 | 2107 |
| 0.9 | 2200 | 390,451 | 1970 | 2584 |
| gear | ||||
| 1.8 | 500 | 1,063,341 | 2794 | 3328 |
| 1.5 | 1000 | 1,947,765 | 3001 | 3719 |
| 0.9 | 2200 | 4,454,432 | 4214 | 5205 |
| star | ||||
| 1.8 | 500 | 1,076,432 | 2487 | 2957 |
| 1.5 | 1000 | 1,971,207 | 2703 | 3436 |
| 0.9 | 2200 | 4,509,271 | 3738 | 4411 |
| hexagon | ||||
| 1.8 | 500 | 129,222 | 1436 | 1906 |
| 1.5 | 1000 | 214,078 | 1698 | 2147 |
| 0.9 | 2200 | 634,755 | 2008 | 2591 |
| Parameter | Value |
|---|---|
| Height of the filter | 20 mm |
| Diameter of the filter | 50 mm |
| Channel diameter | 0.9–1.8 mm |
| Number of channels | 500–2200 |
| Number of Points | Slicing Time (ms) | ||
|---|---|---|---|
| Slicing with the Full Loop Operation | Accelerated Slicing Algorithm | ||
| R-Tree | K-d Tree | ||
| 1250 | 1004 | 1000 | 960 |
| 5000 | 1699 | 1102 | 1143 |
| 20,000 | 2800 | 1425 | 1300 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Maltsev, E.; Popov, D.; Chugunov, S.; Pasko, A.; Akhatov, I. An Accelerated Slicing Algorithm for Frep Models. Appl. Sci. 2021, 11, 6767. https://doi.org/10.3390/app11156767
Maltsev E, Popov D, Chugunov S, Pasko A, Akhatov I. An Accelerated Slicing Algorithm for Frep Models. Applied Sciences. 2021; 11(15):6767. https://doi.org/10.3390/app11156767
Chicago/Turabian StyleMaltsev, Evgenii, Dmitry Popov, Svyatoslav Chugunov, Alexander Pasko, and Iskander Akhatov. 2021. "An Accelerated Slicing Algorithm for Frep Models" Applied Sciences 11, no. 15: 6767. https://doi.org/10.3390/app11156767
APA StyleMaltsev, E., Popov, D., Chugunov, S., Pasko, A., & Akhatov, I. (2021). An Accelerated Slicing Algorithm for Frep Models. Applied Sciences, 11(15), 6767. https://doi.org/10.3390/app11156767