
Exact and Evolutionary Algorithms for Synchronization of Public Transportation Timetables Considering Extended Transfer Zones †



Abstract
:Featured Application
Abstract
1. Introduction
2. The Bus Synchronization Problem
Overall Description of the Problem Model
3. Related Work
4. The Proposed Problem Formulations
4.1. Problem Data
- The planning period , expressed in minutes.
- A set of bus lines , whose routes are fixed and known beforehand.
- The total trips needed to perform in order to fulfill the demand for each line i within the planning period is . The demand considers both direct trips and transfers.
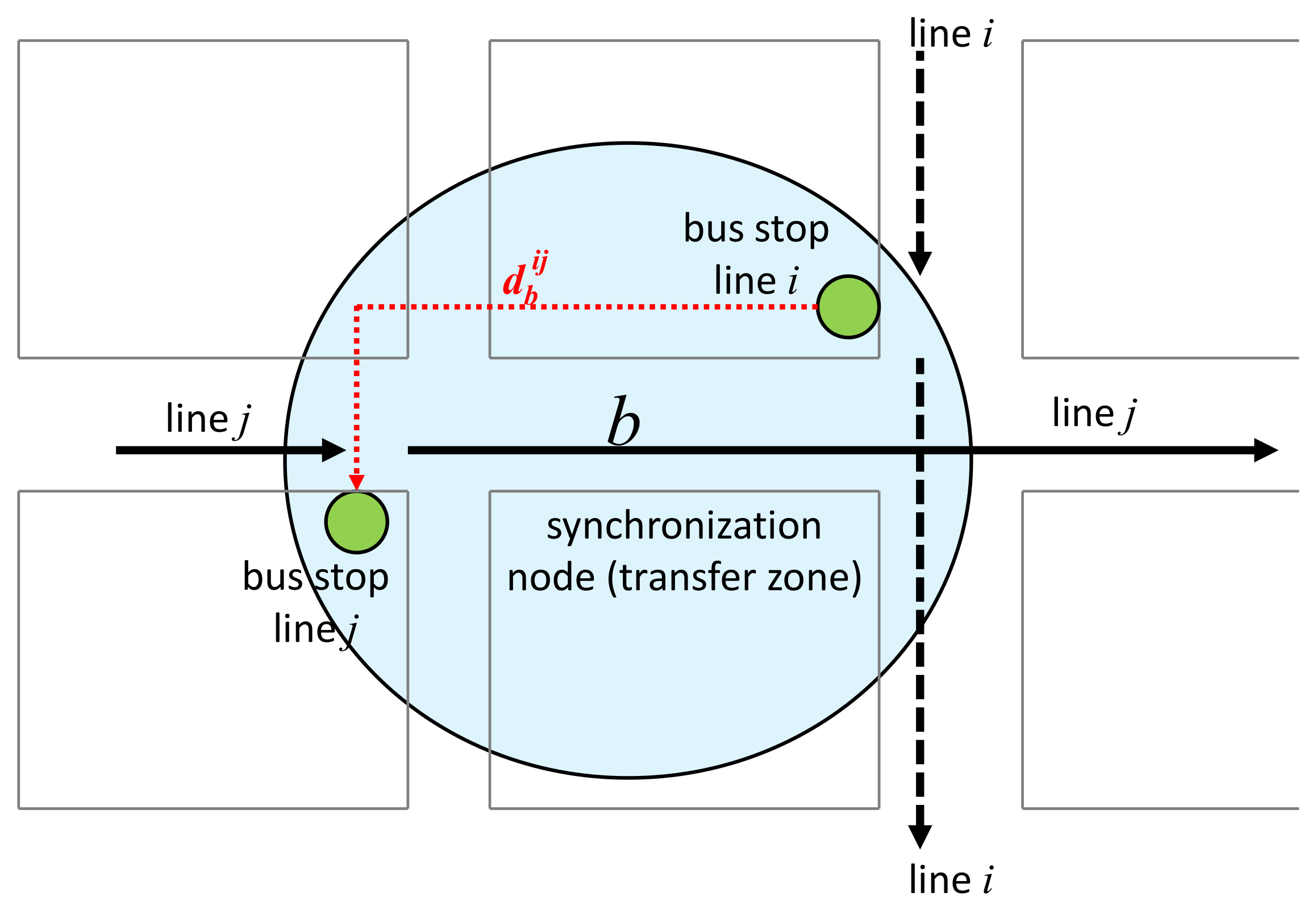
- A set of synchronization nodes, or transfer zones, . Each transfer zone has three elements <>: i and j are the lines that may synchronize, and is the distance that separates the bus stops for lines i and j in b. Each b considers two bus stops with transfer demand between lines i and j, as described in Figure 1. The distance defines the time that a passenger must walk to transfer from the bus stop of line i to the bus stop of line j in the considered transfer zone.
- A traveling time function . defining the time that buses in line i need to travel to reach the transfer zone b. The time is measured from the departure of the line. The traveling time depends of the studied scenario and is affected by several factors such as the maximum allowed speed, the traffic in the city, the travel demands, etc.
- A demand function . defines how many passengers perform a transfer from line i to line j in transfer zone b in . As described in the previous subsection, a hypothesis of uniform demand is assumed. Thus, an effective number transfers from a trip of line i to a trip of line j is properly defined, taking into account the time between two consecutive trips of buses in line i. The uniform demand hypothesis is realistic for short periods, such as in the problem instances defined and solved for the addressed case study.
- The maximum time that passengers are willing to wait for line j, after alighting from line i and walking to the corresponding stop of line j in a transfer zone b. Two trips of line i and j are synchronized for transfers if and only if the waiting time of passengers that transfer from line i to line j is lower than or equal to .
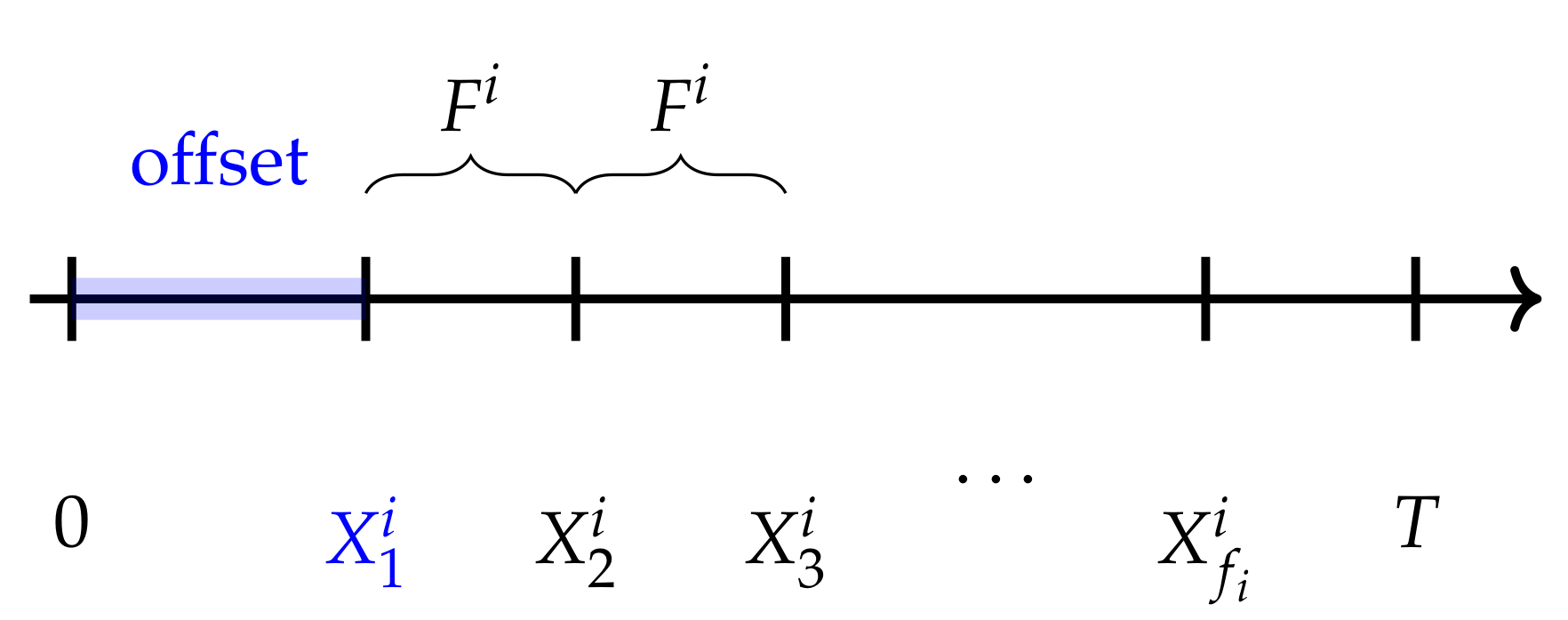
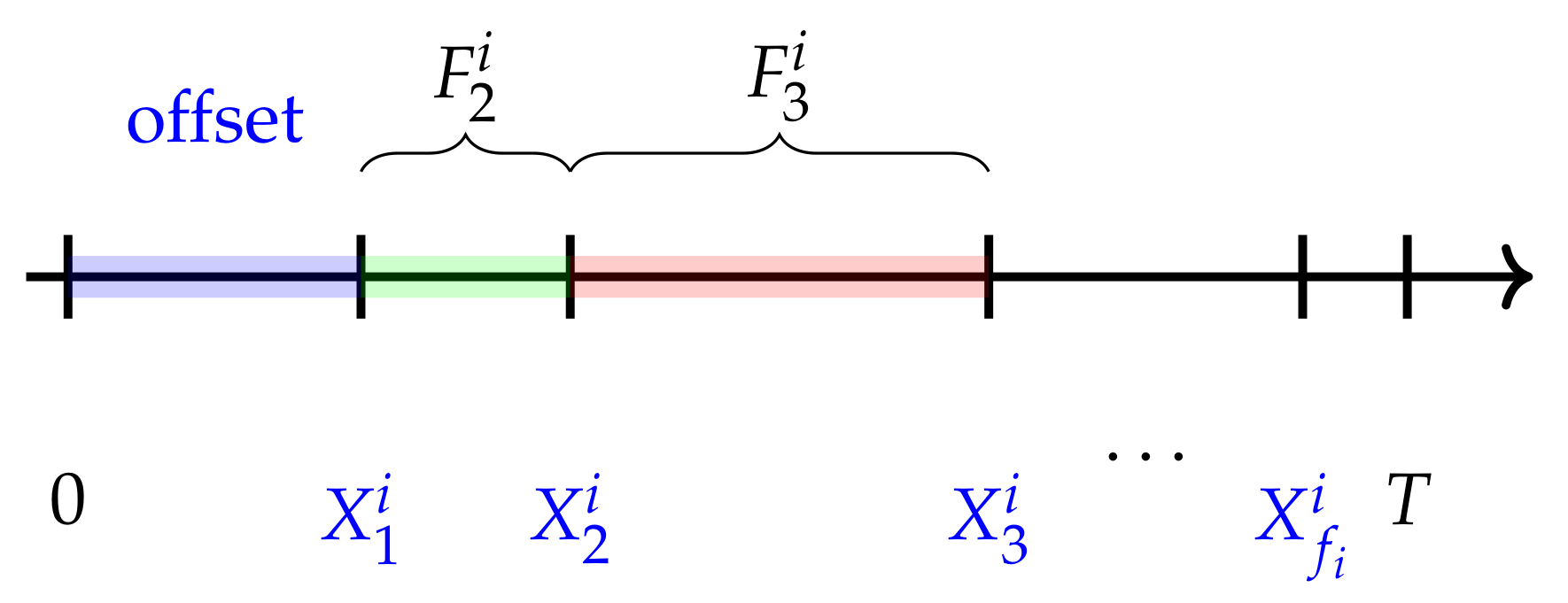
- A set of departing times of each trip r of line i, , which define the headways of the line as the time between two consecutive trips . Headway values must be within a range of minimum () and maximum () headways for that line. Both extreme values are defined by the city administration or the bus system operator. The offset of each line is the departing time of the first trip of the line (). Without losing generality, the model assumes . All trips of each line must start within the planning period (i.e., ).
4.2. Problem Variant #1: Offset Optimization
4.3. Problem Variant #2: Headways Optimization
5. Exact and Evolutionary Computation Methods for the BSP
5.1. Mathematical Programming
5.2. Evolutionary Algorithm
Solution Encoding
6. Experimental Evaluation
6.1. Methodology
6.1.1. Problem Instances
- The starting time was set to 12:00 p.m., and the final time was set to 2:00 p.m., including one of the two peak hours occurring in a working day for the public transportation system in Montevideo [21].
- The transfer demand function (P) is generated from real information registered by the smart cards of the STM.
- The transfer zones are selected from the pairs of bus stops with the largest demand of registered transfers for the period; all pairs are candidates to be selected in the created BSP instances; the number of considered transfer zones is 170.
- The bus lines are those connecting the considered transfer zones; a total number of 250 lines are considered.
- The time traveling function () is computed by processing the real GPS data from the operating vehicles for each line;
- The walking time function is defined by the product of the estimated pedestrian speed (6 km/h) and the distance between bus stops in each transfer zone; the distance is computed using geospatial analysis.
- The maximum waiting time (W) is ; five values of are considered ( [0.3, 0.5, 0.7, 0.9] to define BSP instances with different tolerance levels.
6.1.2. Execution Platform
6.1.3. Baseline Solution for the Comparison
6.1.4. Statistical Analysis and Metrics
- Normality check. The Shapiro–Wilk statistical test is applied to determine if the results distribution is modeled by a normal distribution, i.e., computing the likeliness of the underlying randomness to be normally distributed.
- Mean rank comparison (for parametric configuration analysis). The Friedman rank statistical test is applied to detect/analyze the differences in the distributions of fitness values across multiple executions.
- Pairwise comparison of distributions. The Kruskal–Wallis non-parametric test is applied to determine if the differences between two parameter configurations have statistic significance.
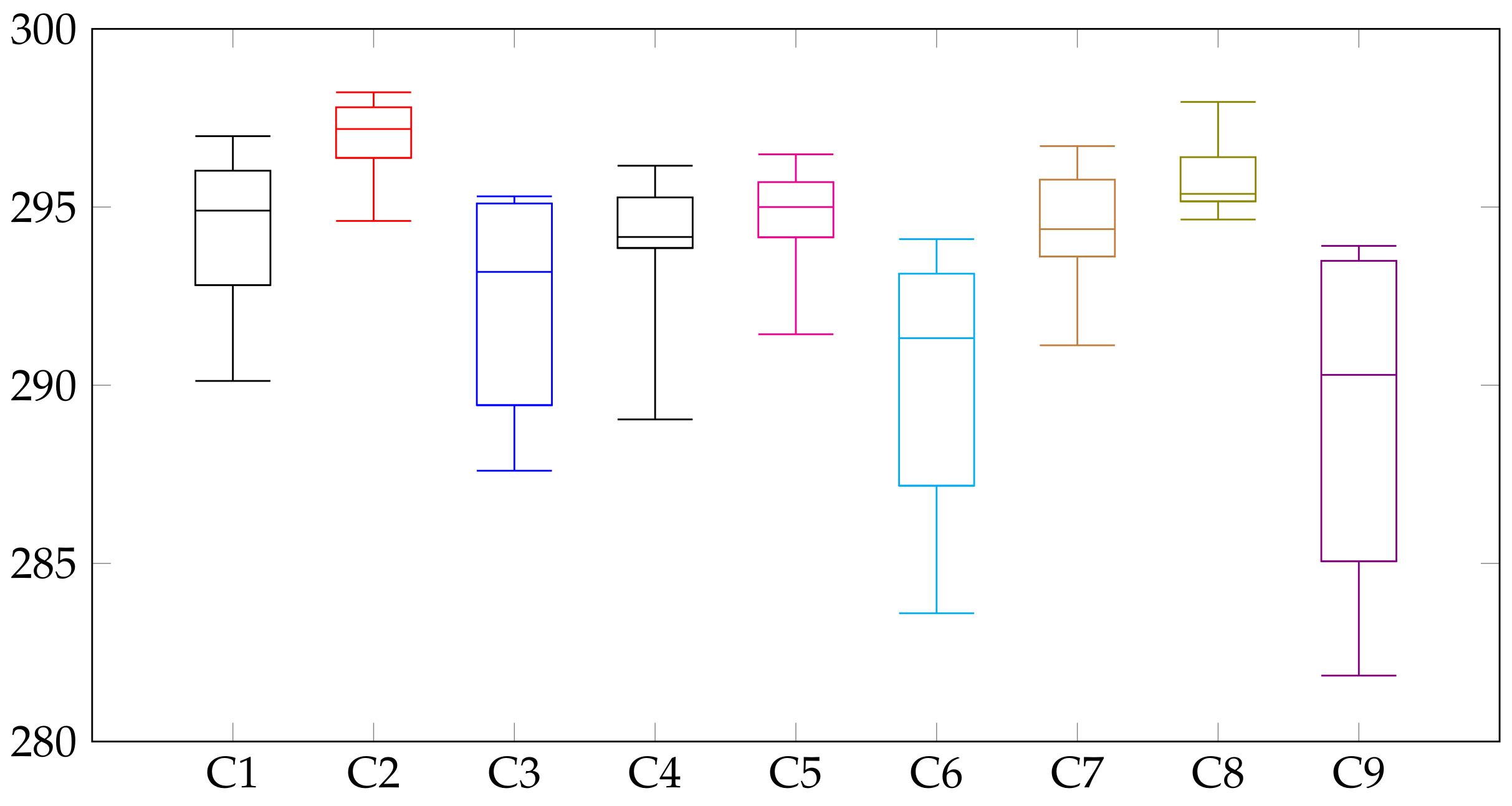
- Boxplots are used for results visualization and graphical comparison. Relevant order statistics are computed and reported: first quartile (Q1), third quartile (Q3), median, minimum, and maximum values, since the Shapiro–Wilk test confirmed that the results do not follow a normal distribution. The interquartile range (IQR) is used as a measure of statistical dispersion, as usual for non-normal distributions.
6.1.5. Parameter Setting
6.2. Numerical Results
6.2.1. Problem Variant #1: Offset Optimization
6.2.2. Problem Variant #2: Offset and Headways Optimization
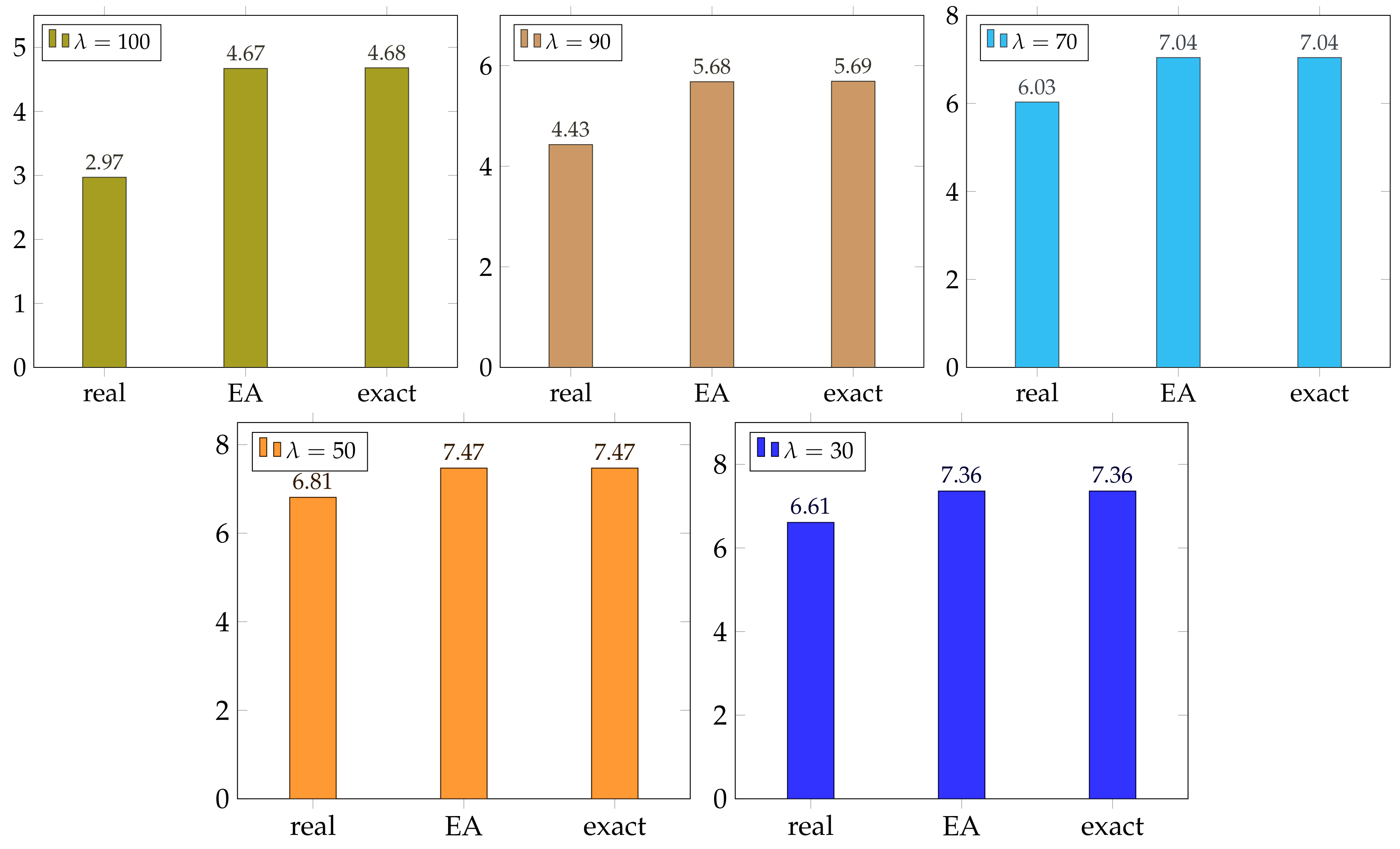
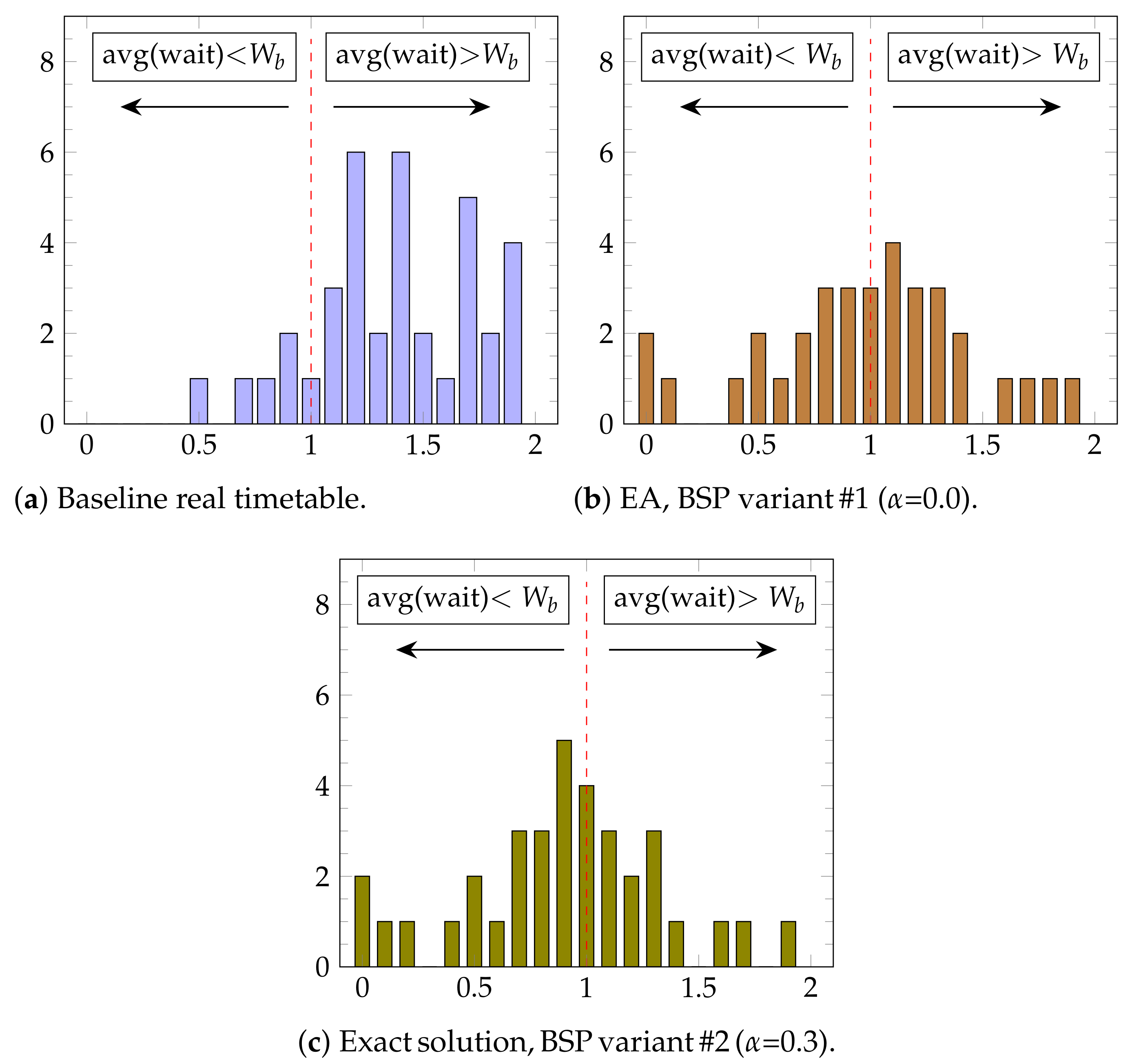
6.2.3. Quality of Service Results
7. Concluding Remarks
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Grava, S. Urban Transportation Systems; McGraw-Hill: New York, NY, USA, 2002. [Google Scholar]
- Nesmachnow, S.; Baña, S.; Massobrio, R. A distributed platform for big data analysis in smart cities: Combining Intelligent Transportation Systems and socioeconomic data for Montevideo, Uruguay. EAI Endorsed Trans. Smart Cities 2017, 2, 1–18. [Google Scholar] [CrossRef] [Green Version]
- Ceder, A.; Wilson, N. Bus network design. Transp. Res. Part B Methodol. 1986, 20, 331–344. [Google Scholar] [CrossRef]
- Hipogrosso, S.; Nesmachnow, S. Analysis of Sustainable Public Transportation and Mobility Recommendations for Montevideo and Parque Rodó Neighborhood. Smart Cities 2020, 3, 479–510. [Google Scholar] [CrossRef]
- Ceder, A.; Tal, O. Timetable Synchronization for Buses. In Lecture Notes in Economics and Mathematical Systems; Springer: Berlin/Heidelberg, Germany, 1999; pp. 245–258. [Google Scholar]
- Risso, C.; Nesmachnow, S. Designing a Backbone Trunk for the Public Transportation Network in Montevideo, Uruguay. In Smart Cities; Springer: Berlin/Heidelberg, Germany, 2020; pp. 228–243. [Google Scholar]
- Massobrio, R.; Nesmachnow, S. Urban Mobility Data Analysis for Public Transportation Systems: A Case Study in Montevideo, Uruguay. Appl. Sci. 2020, 10, 5400. [Google Scholar] [CrossRef]
- Nesmachnow, S.; Muraña, J.; Risso, C. Exact and Metaheuristic Approach for Bus Timetable Synchronization to Maximize Transfers. In Smart Cities; Springer: Berlin/Heidelberg, Germany, 2021; pp. 183–198. [Google Scholar]
- Eranki, A. A Model to Create Bus Timetables to Attain Maximum Synchronization Considering Waiting Times at Transfer Stops. Master’s Thesis, University of South Florida, Tampa, FL, USA, 2004. [Google Scholar]
- Ibarra-Rojas, O.; Rios-Solis, Y. Synchronization of bus timetabling. Transp. Res. Part Methodol. 2012, 46, 599–614. [Google Scholar] [CrossRef]
- Ibarra-Rojas, O.; López-Irarragorri, F.; Rios-Solis, Y. Multiperiod Bus Timetabling. Transp. Sci. 2016, 50, 805–822. [Google Scholar] [CrossRef] [Green Version]
- Saharidis, G.; Dimitropoulos, C.; Skordilis, E. Minimizing waiting times at transitional nodes for public bus transportation in Greece. Oper. Res. 2013, 14, 341–359. [Google Scholar] [CrossRef]
- Salicrú, M.; Fleurent, C.; Armengol, J. Timetable-based operation in urban transport: Run-time optimisation and improvements in the operating process. Transp. Res. Part A Policy Pract. 2011, 45, 721–740. [Google Scholar] [CrossRef]
- Daduna, J.; Voß, S. Practical Experiences in Schedule Synchronization. In Lecture Notes in Economics and Mathematical Systems; Springer: Berlin/Heidelberg, Germany, 1995; Volume 430, pp. 39–55. [Google Scholar]
- Ceder, A.; Golany, B.; Tal, O. Creating bus timetables with maximal synchronization. Transp. Res. Part Policy Pract. 2001, 35, 913–928. [Google Scholar] [CrossRef]
- Fleurent, C.; Lessard, R.; Séguin, L. Transit timetable synchronization: Evaluation and optimization. In Proceedings of the 9th International Conference on Computer-aided Scheduling of Public Transport, San Diego, CA, USA, 9–11 August 2004. [Google Scholar]
- Shafahi, Y.; Khani, A. A practical model for transfer optimization in a transit network: Model formulations and solutions. Transp. Res. Part A Policy Pract. 2010, 44, 377–389. [Google Scholar] [CrossRef]
- Abdolmaleki, M.; Masoud, N.; Yin, Y. Transit timetable synchronization for transfer time minimization. Transp. Res. Part B Methodol. 2020, 131, 143–159. [Google Scholar] [CrossRef]
- Nesmachnow, S.; Muraña, J.; Goñi, G.; Massobrio, R.; Tchernykh, A. Evolutionary Approach for Bus Synchronization. In High Performance Computing; Springer: Berlin/Heidelberg, Germany, 2020; pp. 320–336. [Google Scholar]
- Bäck, T.; Fogel, D.; Michalewicz, Z. (Eds.) Handbook of Evolutionary Computation; Oxford University Press: Oxford, UK, 1997. [Google Scholar]
- Massobrio, R.; Nesmachnow, S. Urban Data Analysis for the Public Transportation System of Montevideo, Uruguay. In Smart Cities; Springer: Cham, Switzerland, 2020; pp. 199–214. [Google Scholar]
- Nesmachnow, S.; Iturriaga, S. Cluster-UY: Collaborative Scientific High Performance Computing in Uruguay. In Communications in Computer and Information Science; Springer: Berlin/Heidelberg, Germany, 2019; pp. 188–202. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Problem | Decision Variables | Model (Objective, Constraints) |
|---|---|---|
| variant #1 | (offset) | Equations (1)–(5) |
| variant #2 | (offset), (headways, within range) | Equations (6)–(13) |
| Average Fitness | |||||
| ps | 30.37.30.1 | 30.37.50.1 | 30.37.70.1 | 30.37.90.1 | 30.37.100.1 |
| 15 | 251.96 | 267.15 | 286.97 | 295.06 | 296.51 |
| 25 | 253.78 | 266.50 | 288.01 | 295.45 | 297.48 |
| 50 | 253.70 | 271.89 | 287.39 | 295.37 | 297.19 |
| Friedman Rank (-Value < ) | |||||
| ps | 30.37.30.1 | 30.37.50.1 | 30.37.70.1 | 30.37.90.1 | 30.37.100.1 |
| 15 | 3 | 2 | 3 | 3 | 3 |
| 25 | 1 | 3 | 1 | 1 | 1 |
| 50 | 2 | 1 | 2 | 2 | 2 |
| Best Fitness | |||||
| ps | 30.37.30.1 | 30.37.50.1 | 30.37.70.1 | 30.37.90.1 | 30.37.100.1 |
| 15 | 260.71 | 276.41 | 291.07 | 296.69 | 298.31 |
| 25 | 260.94 | 275.33 | 291.72 | 297.95 | 298.46 |
| 50 | 262.18 | 273.62 | 290.06 | 296.09 | 298.22 |
| Friedman Rank (-Value < ) | |||||
| ps | 30.37.30.1 | 30.37.50.1 | 30.37.70.1 | 30.37.90.1 | 30.37.100.1 |
| 15 | 3 | 1 | 2 | 2 | 2 |
| 25 | 2 | 2 | 1 | 1 | 1 |
| 50 | 1 | 3 | 3 | 3 | 3 |
| Fitness | ||||||||
| id | 30.37.30.1 | 30.37.50.1 | 30.37.70.1 | 30.37.90.1 | 30.37.100.1 | |||
| C1 | 0.5 | 0.010 | 253.18 | 263.90 | 285.82 | 292.03 | 294.97 | |
| C2 | 0.5 | 0.005 | 263.30 | 274.21 | 293.15 | 298.19 | 298.79 | |
| C3 | 0.5 | 0.001 | 253.99 | 267.70 | 287.67 | 295.56 | 297.06 | |
| C4 | 0.75 | 0.010 | 250.67 | 268.65 | 286.70 | 293.12 | 294.50 | |
| C5 | 0.75 | 0.005 | 262.91 | 276.65 | 291.69 | 296.48 | 298.25 | |
| C6 | 0.75 | 0.001 | 250.32 | 270.05 | 284.09 | 292.87 | 294.89 | |
| C7 | 0.9 | 0.010 | 255.12 | 269.66 | 289.43 | 293.91 | 296.06 | |
| C8 | 0.9 | 0.005 | 260.94 | 275.33 | 291.72 | 297.95 | 298.46 | |
| C9 | 0.9 | 0.001 | 256.80 | 269.87 | 288.57 | 296.71 | 297.45 | |
| Friedman Rank | ||||||||
| id | 30.37.30.1 | 30.37.50.1 | 30.37.70.1 | 30.37.90.1 | 30.37.100.1 | avg. | ||
| C1 | 0.50 | 0.01 | 7 | 9 | 8 | 9 | 7 | 8.0 |
| C2 | 0.50 | 0.005 | 1 | 3 | 1 | 1 | 1 | 1.4 |
| C3 | 0.50 | 0.001 | 6 | 8 | 6 | 5 | 5 | 6.0 |
| C4 | 0.75 | 0.01 | 8 | 7 | 7 | 7 | 9 | 7.6 |
| C5 | 0.75 | 0.005 | 2 | 1 | 3 | 4 | 3 | 2.6 |
| C6 | 0.75 | 0.001 | 9 | 4 | 9 | 8 | 8 | 7.6 |
| C7 | 0.90 | 0.01 | 5 | 6 | 4 | 6 | 6 | 5.4 |
| C8 | 0.90 | 0.005 | 3 | 2 | 2 | 2 | 2 | 2.2 |
| C9 | 0.90 | 0.001 | 4 | 5 | 5 | 3 | 4 | 4.2 |
| Scenario | EA | Exact | Real | EA vs. Exact | EA vs. Real | Exact vs. Real |
|---|---|---|---|---|---|---|
| 30.37.100.1 | 265.76 | 265.76 | 245.33 | 0.00% | 8.3% | 8.3% |
| 30.37.30.1 | 171.12 | 171.12 | 102.88 | 0.00% | 66.3% | 66.3% |
| 30.37.50.1 | 203.52 | 203.58 | 165.28 | −0.03% | 23.1% | 23.2% |
| 30.37.70.1 | 252.22 | 252.22 | 219.60 | 0.00% | 14.9% | 14.9% |
| 30.37.90.1 | 260.68 | 260.68 | 245.33 | 0.00% | 6.3% | 6.3% |
| 30.40.100.0 | 205.68 | 205.68 | 187.57 | 0.00% | 9.7% | 9.7% |
| 30.40.100.4 | 223.17 | 223.17 | 204.49 | 0.00% | 9.1% | 9.1% |
| 30.40.30.0 | 131.76 | 132.13 | 82.83 | −0.28% | 59.1% | 59.5% |
| 30.40.30.4 | 143.98 | 143.98 | 98.36 | 0.00% | 46.4% | 46.4% |
| 30.40.50.0 | 162.15 | 162.17 | 122.31 | −0.01% | 32.6% | 32.6% |
| 30.40.50.4 | 169.66 | 169.66 | 123.83 | 0.00% | 37.0% | 37.0% |
| 30.40.70.0 | 195.54 | 195.54 | 166.10 | 0.00% | 17.7% | 17.7% |
| 30.40.70.4 | 208.99 | 208.99 | 179.18 | 0.00% | 16.6% | 16.6% |
| 30.40.90.0 | 205.68 | 205.68 | 187.57 | 0.00% | 9.7% | 9.7% |
| 30.40.90.4 | 223.12 | 223.12 | 202.69 | 0.00% | 10.1% | 10.1% |
| 30.41.100.2 | 247.59 | 247.59 | 224.50 | 0.00% | 10.3% | 10.3% |
| 30.41.30.2 | 154.11 | 154.20 | 95.89 | −0.06% | 60.7% | 60.8% |
| 30.41.50.2 | 186.95 | 187.35 | 145.39 | −0.21% | 28.6% | 28.9% |
| 30.41.70.2 | 236.50 | 236.50 | 195.47 | 0.00% | 21.0% | 21.0% |
| 30.41.90.2 | 247.59 | 247.59 | 224.05 | 0.00% | 10.5% | 10.5% |
| 30.42.100.3 | 231.13 | 231.13 | 211.67 | 0.00% | 9.2% | 9.2% |
| 30.42.30.3 | 138.83 | 138.83 | 93.27 | 0.00% | 48.8% | 48.8% |
| 30.42.50.3 | 168.64 | 168.64 | 142.38 | 0.00% | 18.4% | 18.4% |
| 30.42.70.3 | 212.78 | 212.78 | 187.80 | 0.00% | 13.3% | 13.3% |
| 30.42.90.3 | 230.98 | 230.98 | 211.12 | 0.00% | 9.4% | 9.4% |
| 70.60.100.1 | 540.41 | 540.41 | 492.20 | 0.00% | 9.8% | 9.8% |
| 70.60.30.1 | 332.11 | 333.02 | 211.56 | −0.27% | 57.0% | 57.4% |
| 70.60.50.1 | 404.30 | 406.61 | 310.96 | −0.57% | 30.0% | 30.8% |
| 70.60.70.1 | 509.60 | 509.60 | 435.28 | 0.00% | 17.1% | 17.1% |
| 70.60.90.1 | 539.53 | 539.53 | 491.70 | 0.00% | 9.7% | 9.7% |
| 70.62.100.3 | 522.34 | 522.34 | 479.58 | 0.00% | 8.9% | 8.9% |
| 70.62.30.3 | 306.14 | 309.02 | 207.12 | −0.93% | 47.8% | 49.2% |
| 70.62.50.3 | 388.99 | 389.69 | 321.41 | −0.18% | 21.0% | 21.2% |
| 70.62.70.3 | 486.82 | 486.82 | 417.53 | 0.00% | 16.6% | 16.6% |
| 70.62.90.3 | 521.82 | 521.82 | 478.46 | 0.00% | 9.1% | 9.1% |
| 70.63.100.2 | 525.90 | 525.90 | 478.87 | 0.00% | 9.8% | 9.8% |
| 70.63.30.2 | 332.06 | 334.45 | 200.77 | −0.55% | 65.7% | 66.6% |
| 70.63.50.2 | 405.90 | 405.90 | 316.53 | 0.00% | 28.2% | 28.2% |
| 70.63.70.2 | 497.84 | 497.84 | 427.21 | 0.00% | 16.5% | 16.5% |
| 70.63.90.2 | 525.90 | 525.90 | 477.09 | 0.00% | 10.2% | 10.2% |
| 70.67.100.0 | 487.42 | 487.42 | 440.27 | 0.00% | 10.7% | 10.7% |
| 70.67.30.0 | 304.60 | 304.85 | 203.81 | −0.08% | 49.5% | 49.6% |
| 70.67.50.0 | 374.91 | 374.98 | 289.39 | −0.02% | 29.6% | 29.6% |
| 70.67.70.0 | 459.73 | 459.93 | 386.96 | −0.04% | 18.8% | 18.9% |
| 70.67.90.0 | 487.42 | 487.42 | 440.27 | 0.00% | 10.7% | 10.7% |
| 70.69.100.4 | 505.15 | 505.15 | 456.10 | 0.00% | 10.8% | 10.8% |
| 70.69.30.4 | 322.57 | 322.57 | 209.04 | 0.00% | 54.3% | 54.3% |
| 70.69.50.4 | 385.63 | 385.63 | 295.16 | 0.00% | 30.7% | 30.7% |
| 70.69.70.4 | 475.36 | 475.36 | 408.63 | 0.00% | 16.3% | 16.3% |
| 70.69.90.4 | 504.20 | 504.20 | 454.31 | 0.00% | 11.0% | 11.0% |
| 110.76.100.2 | 777.19 | 777.19 | 706.18 | 0.00% | 10.1% | 10.1% |
| 110.76.30.2 | 487.71 | 489.13 | 298.20 | −0.29% | 63.6% | 64.0% |
| 110.76.50.2 | 591.50 | 591.50 | 465.58 | 0.00% | 27.0% | 27.0% |
| 110.76.70.2 | 731.20 | 731.20 | 631.71 | 0.00% | 15.7% | 15.7% |
| 110.76.90.2 | 777.06 | 777.06 | 703.90 | 0.00% | 10.4% | 10.4% |
| 110.78.100.0 | 806.58 | 806.58 | 728.94 | 0.00% | 10.7% | 10.7% |
| 110.78.100.1 | 826.45 | 826.45 | 752.16 | 0.00% | 9.9% | 9.9% |
| 110.78.100.3 | 803.13 | 803.13 | 731.61 | 0.00% | 9.8% | 9.8% |
| 110.78.30.0 | 487.92 | 490.34 | 315.02 | −0.49% | 54.9% | 55.7% |
| 110.78.30.1 | 507.28 | 511.37 | 311.43 | −0.80% | 62.9% | 64.2% |
| 110.78.30.3 | 499.39 | 499.39 | 307.45 | 0.00% | 62.4% | 62.4% |
| 110.78.50.0 | 606.89 | 610.36 | 461.39 | −0.57% | 31.5% | 32.3% |
| 110.78.50.1 | 623.89 | 623.89 | 467.20 | 0.00% | 33.5% | 33.5% |
| 110.78.50.3 | 605.72 | 609.60 | 472.20 | −0.64% | 28.3% | 29.1% |
| 110.78.70.0 | 753.93 | 754.26 | 648.61 | −0.04% | 16.2% | 16.3% |
| 110.78.70.1 | 775.14 | 775.14 | 659.51 | 0.00% | 17.5% | 17.5% |
| 110.78.70.3 | 753.11 | 753.76 | 635.61 | −0.09% | 18.5% | 18.6% |
| 110.78.90.0 | 805.77 | 805.77 | 727.38 | 0.00% | 10.8% | 10.8% |
| 110.78.90.1 | 824.47 | 824.47 | 751.09 | 0.00% | 9.8% | 9.8% |
| 110.78.90.3 | 802.42 | 802.42 | 729.99 | 0.00% | 9.9% | 9.9% |
| 110.83.100.4 | 779.09 | 779.09 | 713.79 | 0.00% | 9.1% | 9.1% |
| 110.83.30.4 | 501.43 | 501.43 | 305.51 | 0.00% | 64.1% | 64.1% |
| 110.83.50.4 | 593.89 | 593.89 | 464.88 | 0.00% | 27.8% | 27.8% |
| 110.83.70.4 | 730.68 | 730.68 | 635.29 | 0.00% | 15.0% | 15.0% |
| 110.83.90.4 | 778.09 | 778.09 | 711.49 | 0.00% | 9.4% | 9.4% |
| EA Over Real | Exact Over Real | EA vs. Exact | ||||||
| Instances | Instances | Instances | ||||||
| 30 | 57.56% | 15 | 30 | 57.96% | 15 | 30 | −0.25% | 15 |
| 50 | 28.49% | 15 | 50 | 28.68% | 15 | 50 | −0.15% | 15 |
| 70 | 16.79% | 15 | 70 | 16.80% | 15 | 70 | −0.01% | 15 |
| 90 | 9.79% | 15 | 90 | 9.79% | 15 | 90 | 0.00% | 15 |
| 100 | 9.74% | 15 | 100 | 9.74% | 15 | 100 | 0.00% | 15 |
| EA Over Real | Exact Over Real | EA vs. Exact | ||||||
| Instances | Instances | Instances | ||||||
| 30 | 23.88% | 25 | 30 | 23.92% | 25 | 30 | −0.02% | 25 |
| 70 | 23.99% | 25 | 70 | 24.15% | 25 | 70 | −0.11% | 25 |
| 110 | 25.55% | 25 | 110 | 25.72% | 25 | 110 | −0.12% | 25 |
| Scenario | #vars | #varsCtl | #varsBool | Best-Sol | GAP | Time to Solution |
|---|---|---|---|---|---|---|
| 30.40.100.0 | 7762 | 410 | 3676 | 240.48 | 15.01% | 6533 |
| 30.40.30.0 | 7762 | 410 | 3676 | 231.80 | 15.36% | 7015 |
| 30.40.50.0 | 7762 | 410 | 3676 | 236.45 | 12.78% | 6952 |
| 30.40.70.0 | 7762 | 410 | 3676 | 239.78 | 13.84% | 6487 |
| 30.40.90.0 | 7762 | 410 | 3676 | 240.31 | 13.58% | 6502 |
| 30.40.100.4 | 8086 | 418 | 3834 | 261.02 | 11.26% | 1914 |
| 30.40.30.4 | 8086 | 418 | 3834 | 246.10 | 16.24% | 6822 |
| 30.40.50.4 | 8086 | 418 | 3834 | 251.91 | 14.88% | 328 |
| 30.40.70.4 | 8086 | 418 | 3834 | 258.56 | 12.69% | 640 |
| 30.40.90.4 | 8086 | 418 | 3834 | 261.22 | 11.48% | 272 |
| 30.42.100.3 | 9053 | 481 | 4286 | 266.78 | 13.77% | 6544 |
| 30.42.30.3 | 9053 | 481 | 4286 | 250.58 | 14.47% | 6912 |
| 30.42.50.3 | 9053 | 481 | 4286 | 261.86 | 12.01% | 6606 |
| 30.42.70.3 | 9053 | 481 | 4286 | 265.36 | 12.92% | 319 |
| 30.42.90.3 | 9053 | 481 | 4286 | 266.51 | 14.40% | 196 |
| 30.37.100.1 | 9107 | 435 | 4336 | 301.73 | 16.91% | 6456 |
| 30.37.30.1 | 9107 | 435 | 4336 | 283.66 | 19.13% | 6562 |
| 30.37.50.1 | 9107 | 435 | 4336 | 294.14 | 18.31% | 7061 |
| 30.37.70.1 | 9107 | 435 | 4336 | 300.95 | 16.84% | 6692 |
| 30.37.90.1 | 9107 | 435 | 4336 | 299.54 | 15.92% | 6553 |
| 30.41.100.2 | 9435 | 467 | 4484 | 279.61 | 19.24% | 4747 |
| 30.41.30.2 | 9435 | 467 | 4484 | 256.80 | 26.11% | 375 |
| 30.41.50.2 | 9435 | 467 | 4484 | 271.55 | 20.20% | 7157 |
| 30.41.70.2 | 9435 | 467 | 4484 | 278.92 | 18.63% | 267 |
| 30.41.90.2 | 9435 | 467 | 4484 | 277.95 | 19.53% | 2493 |
| 70.67.100.0 | 18,466 | 692 | 8887 | 560.70 | 17.97% | 1972 |
| 70.67.30.0 | 18,466 | 692 | 8887 | 504.97 | 27.64% | 7153 |
| 70.67.50.0 | 18,466 | 692 | 8887 | 533.73 | 21.65% | 7194 |
| 70.67.70.0 | 18,466 | 692 | 8887 | 542.97 | 22.29% | 4448 |
| 70.67.90.0 | 18,466 | 692 | 8887 | 553.31 | 19.78% | 7134 |
| 70.69.100.4 | 19,408 | 720 | 9344 | 579.77 | 17.29% | 6601 |
| 70.69.30.4 | 19,408 | 720 | 9344 | 509.99 | 29.70% | 4178 |
| 70.69.50.4 | 19,408 | 720 | 9344 | 534.51 | 25.21% | 3671 |
| 70.69.70.4 | 19,408 | 720 | 9344 | 566.38 | 19.77% | 4382 |
| 70.69.90.4 | 19,408 | 720 | 9344 | 581.45 | 17.21% | 6980 |
| 70.60.100.1 | 19,469 | 659 | 9405 | 609.27 | 21.51% | 7087 |
| 70.60.30.1 | 19,469 | 659 | 9405 | 539.19 | 33.65% | 7189 |
| 70.60.50.1 | 19,469 | 659 | 9405 | 570.25 | 27.76% | 7119 |
| 70.60.70.1 | 19,469 | 659 | 9405 | 602.28 | 21.85% | 7062 |
| 70.60.90.1 | 19,469 | 659 | 9405 | 614.67 | 20.26% | 7098 |
| 70.62.100.3 | 19,608 | 648 | 9480 | 605.51 | 16.38% | 7084 |
| 70.62.30.3 | 19,608 | 648 | 9480 | 535.45 | 27.84% | 7120 |
| 70.62.50.3 | 19,608 | 648 | 9480 | 573.81 | 21.20% | 7148 |
| 70.62.70.3 | 19,608 | 648 | 9480 | 592.85 | 18.51% | 7033 |
| 70.62.90.3 | 19,608 | 648 | 9480 | 602.33 | 16.96% | 7139 |
| 70.63.100.2 | 19,667 | 653 | 9507 | 598.86 | 20.99% | 7049 |
| 70.63.30.2 | 19,667 | 653 | 9507 | 514.17 | 37.05% | 7152 |
| 70.63.50.2 | 19,667 | 653 | 9507 | 554.54 | 28.91% | 7192 |
| 70.63.70.2 | 19,667 | 653 | 9507 | 594.11 | 21.18% | 7160 |
| 70.63.90.2 | 19,667 | 653 | 9507 | 594.78 | 21.66% | 6979 |
| 110.78.100.0 | 29,561 | 763 | 14,399 | 891.64 | 25.00% | 7194 |
| 110.78.30.0 | 29,561 | 763 | 14,399 | 804.94 | 35.38% | 7154 |
| 110.78.50.0 | 29,561 | 763 | 14,399 | 811.56 | 34.99% | 7177 |
| 110.78.70.0 | 29,561 | 763 | 14,399 | 896.75 | 22.85% | 7155 |
| 110.78.90.0 | 29,561 | 763 | 14,399 | 902.26 | 23.58% | 7175 |
| 110.78.100.1 | 29,861 | 799 | 14,531 | 936.73 | 21.63% | 7164 |
| 110.78.30.1 | 29,861 | 799 | 14,531 | 791.59 | 40.92% | 7159 |
| 110.78.50.1 | 29,861 | 799 | 14,531 | 848.34 | 32.66% | 7142 |
| 110.78.70.1 | 29,861 | 799 | 14,531 | 916.96 | 23.12% | 7166 |
| 110.78.90.1 | 29,861 | 799 | 14,531 | 920.41 | 23.52% | 7163 |
| 110.78.100.3 | 30,376 | 810 | 14,783 | 924.06 | 21.21% | 7159 |
| 110.78.30.3 | 30,376 | 810 | 14,783 | 807.20 | 35.26% | 7174 |
| 110.78.50.3 | 30,376 | 810 | 14,783 | 857.82 | 28.76% | 7152 |
| 110.78.70.3 | 30,376 | 810 | 14,783 | 904.65 | 23.12% | 7180 |
| 110.78.90.3 | 30,376 | 810 | 14,783 | 920.32 | 21.23% | 7142 |
| 110.76.100.2 | 30,558 | 772 | 14,893 | 886.30 | 21.99% | 7158 |
| 110.76.30.2 | 30,558 | 772 | 14,893 | 752.96 | 40.05% | 7172 |
| 110.76.50.2 | 30,558 | 772 | 14,893 | 789.53 | 34.76% | 7116 |
| 110.76.70.2 | 30,558 | 772 | 14,893 | 852.75 | 25.33% | 7174 |
| 110.76.90.2 | 30,558 | 772 | 14,893 | 870.84 | 24.08% | 7176 |
| 110.83.100.4 | 30,762 | 858 | 14,952 | 887.73 | 20.74% | 7139 |
| 110.83.30.4 | 30,762 | 858 | 14,952 | 744.44 | 40.45% | 7181 |
| 110.83.50.4 | 30,762 | 858 | 14,952 | 816.41 | 29.22% | 7112 |
| 110.83.70.4 | 30,762 | 858 | 14,952 | 852.20 | 24.63% | 7054 |
| 110.83.90.4 | 30,762 | 858 | 14,952 | 887.83 | 20.57% | 7154 |
| Scenario | EA | Exact | Real | EA vs. Exact | EA vs. Real | Exact vs. Real |
|---|---|---|---|---|---|---|
| 30.37.100.1 | 298.79 | 301.73 | 245.33 | % | 21.8% | 23.0% |
| 30.37.30.1 | 282.68 | 283.66 | 102.88 | −0.35% | 155.9% | 175.7% |
| 30.37.50.1 | 294.14 | 294.14 | 165.28 | 0.00% | 66.6% | 78.0% |
| 30.37.70.1 | 300.95 | 300.95 | 219.60 | 0.00% | 33.5% | 37.0% |
| 30.37.90.1 | 298.19 | 299.54 | 245.33 | −0.45% | 21.5% | 22.1% |
| 30.40.100.0 | 240.48 | 240.48 | 187.57 | 0.00% | 26.8% | 28.2% |
| 30.40.100.4 | 261.02 | 261.02 | 204.49 | 0.00% | 26.8% | 27.6% |
| 30.40.30.0 | 223.96 | 231.80 | 82.83 | −3.38% | 152.8% | 179.9% |
| 30.40.30.4 | 234.73 | 246.10 | 98.36 | −4.62% | 133.2% | 150.2% |
| 30.40.50.0 | 233.81 | 236.45 | 122.31 | −1.12% | 80.1% | 93.3% |
| 30.40.50.4 | 247.48 | 251.91 | 123.83 | −1.76% | 92.7% | 103.4% |
| 30.40.70.0 | 239.44 | 239.78 | 166.10 | −0.14% | 40.2% | 44.4% |
| 30.40.70.4 | 258.56 | 258.56 | 179.18 | 0.00% | 41.1% | 44.3% |
| 30.40.90.0 | 240.31 | 240.31 | 187.57 | 0.00% | 25.7% | 28.1% |
| 30.40.90.4 | 261.22 | 261.22 | 202.69 | 0.00% | 27.6% | 28.9% |
| 30.41.100.2 | 279.61 | 279.61 | 224.50 | 0.00% | 23.2% | 24.5% |
| 30.41.30.2 | 256.52 | 256.80 | 95.89 | −0.11% | 150.6% | 167.8% |
| 30.41.50.2 | 265.18 | 271.55 | 145.39 | −2.35% | 76.2% | 86.8% |
| 30.41.70.2 | 283.15 | 278.92 | 195.47 | 1.52% | 37.7% | 42.7% |
| 30.41.90.2 | 275.52 | 277.95 | 224.05 | −0.87% | 23.0% | 24.1% |
| 30.42.100.3 | 263.26 | 266.78 | 211.67 | −1.32% | 24.4% | 26.0% |
| 30.42.30.3 | 242.43 | 250.58 | 93.27 | −3.25% | 148.0% | 168.7% |
| 30.42.50.3 | 254.03 | 261.86 | 142.38 | −2.99% | 74.1% | 83.9% |
| 30.42.70.3 | 265.36 | 265.36 | 187.80 | 0.00% | 37.6% | 41.3% |
| 30.42.90.3 | 266.51 | 266.51 | 211.12 | 0.00% | 24.6% | 26.2% |
| 70.60.100.1 | 609.27 | 609.27 | 492.20 | 0.00% | 22.9% | 23.8% |
| 70.60.30.1 | 539.19 | 539.19 | 211.56 | 0.00% | 135.9% | 154.9% |
| 70.60.50.1 | 570.25 | 570.25 | 310.96 | 0.00% | 70.8% | 83.4% |
| 70.60.70.1 | 602.28 | 602.28 | 435.28 | 0.00% | 32.9% | 38.4% |
| 70.60.90.1 | 614.67 | 614.67 | 491.70 | 0.00% | 21.4% | 25.0% |
| 70.62.100.3 | 605.51 | 605.51 | 479.58 | 0.00% | 24.6% | 26.3% |
| 70.62.30.3 | 527.03 | 535.45 | 207.12 | −1.57% | 135.6% | 158.5% |
| 70.62.50.3 | 563.79 | 573.81 | 321.41 | −1.75% | 64.0% | 78.5% |
| 70.62.70.3 | 592.85 | 592.85 | 417.53 | 0.00% | 34.3% | 42.0% |
| 70.62.90.3 | 602.33 | 602.33 | 478.46 | 0.00% | 23.4% | 25.9% |
| 70.63.100.2 | 598.86 | 598.86 | 478.87 | 0.00% | 23.8% | 25.1% |
| 70.63.30.2 | 514.17 | 514.17 | 200.77 | 0.00% | 148.7% | 156.1% |
| 70.63.50.2 | 542.788 | 554.54 | 316.53 | −2.12% | 62.9% | 75.2% |
| 70.63.70.2 | 594.11 | 594.11 | 427.21 | 0.00% | 37.0% | 39.1% |
| 70.63.90.2 | 594.7 | 594.78 | 477.09 | 0.00% | 22.7% | 24.7% |
| 70.67.100.0 | 560.70 | 560.70 | 440.27 | 0.00% | 26.2% | 27.4% |
| 70.67.30.0 | 489.28 | 504.97 | 203.81 | −3.11% | 130.4% | 147.8% |
| 70.67.50.0 | 518.43 | 533.73 | 289.39 | −2.87% | 69.1% | 84.4% |
| 70.67.70.0 | 542.97 | 542.97 | 386.96 | 0.00% | 39.1% | 40.3% |
| 70.67.90.0 | 552.94 | 553.31 | 440.27 | −0.07% | 25.6% | 25.7% |
| 70.69.100.4 | 579.77 | 579.77 | 456.10 | 0.00% | 26.4% | 27.1% |
| 70.69.30.4 | 483.19 | 509.99 | 209.04 | −5.26% | 122.1% | 144.0% |
| 70.69.50.4 | 534.51 | 534.51 | 295.16 | 0.00% | 69.7% | 81.1% |
| 70.69.70.4 | 566.38 | 566.38 | 408.63 | 0.00% | 35.1% | 38.6% |
| 70.69.90.4 | 581.45 | 581.45 | 454.31 | 0.00% | 26.0% | 28.0% |
| 110.76.100.2 | 886.30 | 886.30 | 706.18 | 0.00% | 25.5% | 25.5% |
| 110.76.30.2 | 712.33 | 752.96 | 298.20 | −5.40% | 138.9% | 152.5% |
| 110.76.50.2 | 766.31 | 789.53 | 465.58 | −2.94% | 64.6% | 69.6% |
| 110.76.70.2 | 824.29 | 852.75 | 631.71 | −3.34% | 30.5% | 35.0% |
| 110.76.90.2 | 867.47 | 870.84 | 703.90 | −0.39% | 23.2% | 23.7% |
| 110.78.100.0 | 891.64 | 891.64 | 728.94 | 0.00% | 22.3% | 22.3% |
| 110.78.100.1 | 936.73 | 936.73 | 752.16 | 0.00% | 24.5% | 24.5% |
| 110.78.100.3 | 919.12 | 924.06 | 731.61 | −0.53% | 25.6% | 26.3% |
| 110.78.30.0 | 745.54 | 804.94 | 315.02 | −7.38% | 136.7% | 155.5% |
| 110.78.30.1 | 761.42 | 791.59 | 311.43 | −3.81% | 144.5% | 154.2% |
| 110.78.30.3 | 744.56 | 807.20 | 307.45 | −7.76% | 142.2% | 162.5% |
| 110.78.50.0 | 800.06 | 811.56 | 461.39 | −1.42% | 73.4% | 75.9% |
| 110.78.50.1 | 798.96 | 848.34 | 467.20 | −5.82% | 71.0% | 81.6% |
| 110.78.50.3 | 840.01 | 857.82 | 472.20 | −2.08% | 77.9% | 81.7% |
| 110.78.70.0 | 887.16 | 896.75 | 648.61 | −1.07% | 36.8% | 38.3% |
| 110.78.70.1 | 919.96 | 916.96 | 659.51 | −0.33% | 39.5% | 39.0% |
| 110.78.70.3 | 870.30 | 904.65 | 635.61 | −3.80% | 36.9% | 42.3% |
| 110.78.90.0 | 898.51 | 902.26 | 727.38 | −0.42% | 23.5% | 24.0% |
| 110.78.90.1 | 919.59 | 920.41 | 751.09 | −0.09% | 42.4% | 22.5% |
| 110.78.90.3 | 920.32 | 920.32 | 729.99 | 0.00% | 26.1% | 26.1% |
| 110.83.100.4 | 887.73 | 887.73 | 713.79 | 0.00% | 24.4% | 24.4% |
| 110.83.30.4 | 715.95 | 744.44 | 305.51 | −3.83% | 134.3% | 143.7% |
| 110.83.50.4 | 861.29 | 816.41 | 464.88 | −6.75% | 63.8% | 75.6% |
| 110.83.70.4 | 829.03 | 852.20 | 635.29 | −2.72% | 30.5% | 34.1% |
| 110.83.90.4 | 879.41 | 887.83 | 711.49 | −0.95% | 23.6% | 24.8% |
| EA Over Real | Exact Over Real | EA vs. Exact | ||||||
| Instances | Instances | Instances | ||||||
| 30 | 150.95% | 15 | 30 | 158.13% | 15 | 30 | −3.32% | 15 |
| 50 | 78.06% | 15 | 50 | 82.16% | 15 | 50 | −2.26% | 15 |
| 70 | 38.95% | 15 | 70 | 39.79% | 15 | 70 | −0.61% | 15 |
| 90 | 25.05% | 15 | 90 | 25.32% | 15 | 90 | −0.22% | 15 |
| 100 | 25.23% | 15 | 100 | 25.47% | 15 | 100 | −0.19% | 15 |
| EA Over Real | Exact Over Real | EA vs. Exact | ||||||
| Instances | Instances | Instances | ||||||
| 30 | 68.28% | 25 | 30 | 70.25% | 25 | 30 | −0.89% | 25 |
| 70 | 63.37% | 25 | 70 | 64.84% | 25 | 70 | −0.67% | 25 |
| 110 | 58.50% | 25 | 110 | 63.43% | 25 | 110 | −2.41% | 25 |
| Problem Variant #1 | |||||||
| EA | Exact | Real | EA/Real | Exact/Real | EA − Real | Exact − Real | |
| 30 | 4.67 | 4.68 | 2.97 | 1.57 | 1.58 | 1.70 | 1.72 |
| 50 | 5.68 | 5.69 | 4.43 | 1.28 | 1.28 | 1.25 | 1.26 |
| 70 | 7.04 | 7.04 | 6.03 | 1.17 | 1.17 | 1.01 | 1.01 |
| 90 | 7.47 | 7.47 | 6.81 | 1.10 | 1.10 | 0.66 | 0.66 |
| 100 | 7.36 | 7.36 | 6.61 | 1.11 | 1.11 | 0.75 | 0.75 |
| Problem Variant #2 | |||||||
| EA | Exact | Real | EA/Real | Exact/Real | EA − Real | Exact − Real | |
| 30 | 7.42 | 7.66 | 2.97 | 2.50 | 2.58 | 4.45 | 4.70 |
| 50 | 7.88 | 8.06 | 4.43 | 1.78 | 1.82 | 3.45 | 3.63 |
| 70 | 8.38 | 8.43 | 6.03 | 1.39 | 1.40 | 2.35 | 2.40 |
| 90 | 8.51 | 8.52 | 6.81 | 1.25 | 1.25 | 1.70 | 1.72 |
| 100 | 8.57 | 8.59 | 6.61 | 1.30 | 1.30 | 1.96 | 1.98 |
| Problem Variant #1 | |||||||
| m | Real | EA | Exact | ||||
| / | / | / | |||||
| 30 | 100 | 0.45 | 22/0 | 0.44 | 22/0 | 0.44 | 22/0 |
| 30 | 90 | 0.47 | 21/1 | 0.46 | 22/0 | 0.47 | 22/0 |
| 30 | 70 | 0.59 | 19/3 | 0.54 | 21/1 | 0.53 | 22/0 |
| 30 | 50 | 0.85 | 12/10 | 0.76 | 16/6 | 0.75 | 18/4 |
| 30 | 30 | 1.33 | 3/19 | 1.15 | 10/12 | 1.12 | 11/11 |
| 70 | 100 | 0.46 | 39/0 | 0.44 | 39/0 | 0.44 | 39/0 |
| 70 | 90 | 0.47 | 39/0 | 0.46 | 39/0 | 0.47 | 39/0 |
| 70 | 70 | 0.59 | 33/6 | 0.54 | 39/0 | 0.52 | 39/0 |
| 70 | 50 | 0.85 | 24/14 | 0.74 | 30/9 | 0.73 | 32/6 |
| 70 | 30 | 1.35 | 5/33 | 1.14 | 18/21 | 1.14 | 20/19 |
| 110 | 100 | 0.48 | 49/0 | 0.45 | 49/0 | 0.45 | 49/0 |
| 110 | 90 | 0.49 | 47/2 | 0.48 | 49/0 | 0.46 | 49/0 |
| 110 | 70 | 0.61 | 40/9 | 0.57 | 43/6 | 0.53 | 49/0 |
| 110 | 50 | 0.87 | 28/20 | 0.74 | 33/16 | 0.72 | 40/9 |
| 110 | 30 | 1.38 | 7/42 | 1.14 | 21/28 | 1.10 | 24/23 |
| Problem Variant #2 | |||||||
| Real | EA | Exact | |||||
| / | / | / | |||||
| 30 | 100 | 0.45 | 22/0 | 0.44 | 22/0 | 0.44 | 22/0 |
| 30 | 90 | 0.47 | 22/0 | 0.46 | 22/0 | 0.47 | 22/0 |
| 30 | 70 | 0.59 | 22/0 | 0.54 | 22/0 | 0.53 | 22/0 |
| 30 | 50 | 0.85 | 16/6 | 0.76 | 19/3 | 0.75 | 19/3 |
| 30 | 30 | 1.33 | 3/19 | 1.15 | 5/16 | 1.12 | 7/15 |
| 70 | 100 | 0.46 | 39/0 | 0.44 | 39/0 | 0.44 | 39/0 |
| 70 | 90 | 0.47 | 39/0 | 0.46 | 39/0 | 0.47 | 39/0 |
| 70 | 70 | 0.59 | 38/1 | 0.54 | 39/0 | 0.52 | 39/0 |
| 70 | 50 | 0.85 | 28/10 | 0.74 | 35/3 | 0.73 | 35/4 |
| 70 | 30 | 1.35 | 5/33 | 1.14 | 18/21 | 1.14 | 20/19 |
| 110 | 100 | 0.48 | 49/0 | 0.45 | 49/0 | 0.45 | 49/0 |
| 110 | 90 | 0.49 | 49/0 | 0.48 | 49/0 | 0.46 | 49/0 |
| 110 | 70 | 0.61 | 46/2 | 0.57 | 48/1 | 0.53 | 49/0 |
| 110 | 50 | 0.87 | 34/14 | 0.74 | 41/8 | 0.72 | 44/5 |
| 110 | 30 | 1.38 | 7/42 | 1.14 | 21/28 | 1.10 | 22/27 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nesmachnow, S.; Risso, C. Exact and Evolutionary Algorithms for Synchronization of Public Transportation Timetables Considering Extended Transfer Zones. Appl. Sci. 2021, 11, 7138. https://doi.org/10.3390/app11157138
Nesmachnow S, Risso C. Exact and Evolutionary Algorithms for Synchronization of Public Transportation Timetables Considering Extended Transfer Zones. Applied Sciences. 2021; 11(15):7138. https://doi.org/10.3390/app11157138
Chicago/Turabian StyleNesmachnow, Sergio, and Claudio Risso. 2021. "Exact and Evolutionary Algorithms for Synchronization of Public Transportation Timetables Considering Extended Transfer Zones" Applied Sciences 11, no. 15: 7138. https://doi.org/10.3390/app11157138
APA StyleNesmachnow, S., & Risso, C. (2021). Exact and Evolutionary Algorithms for Synchronization of Public Transportation Timetables Considering Extended Transfer Zones. Applied Sciences, 11(15), 7138. https://doi.org/10.3390/app11157138