
Mechanics Analysis of Rough Surface Based on Shoulder-Shoulder Contact


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Contact Analysis of Rough Surface
2.1. Contact State of Rough Surface
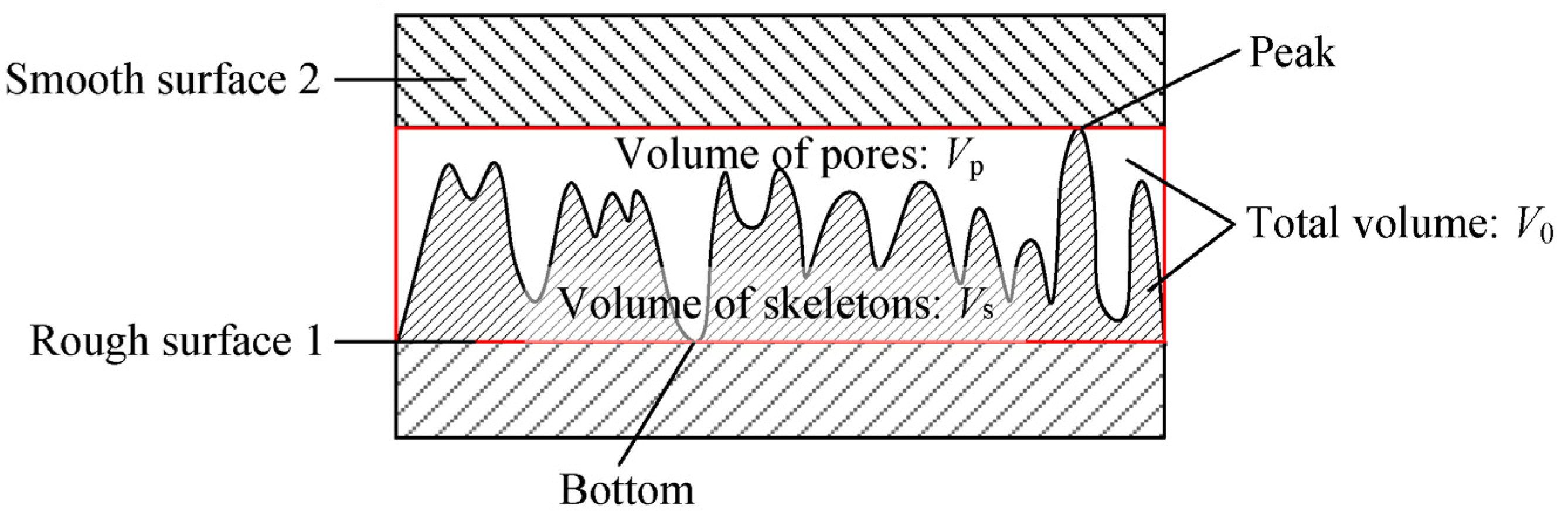
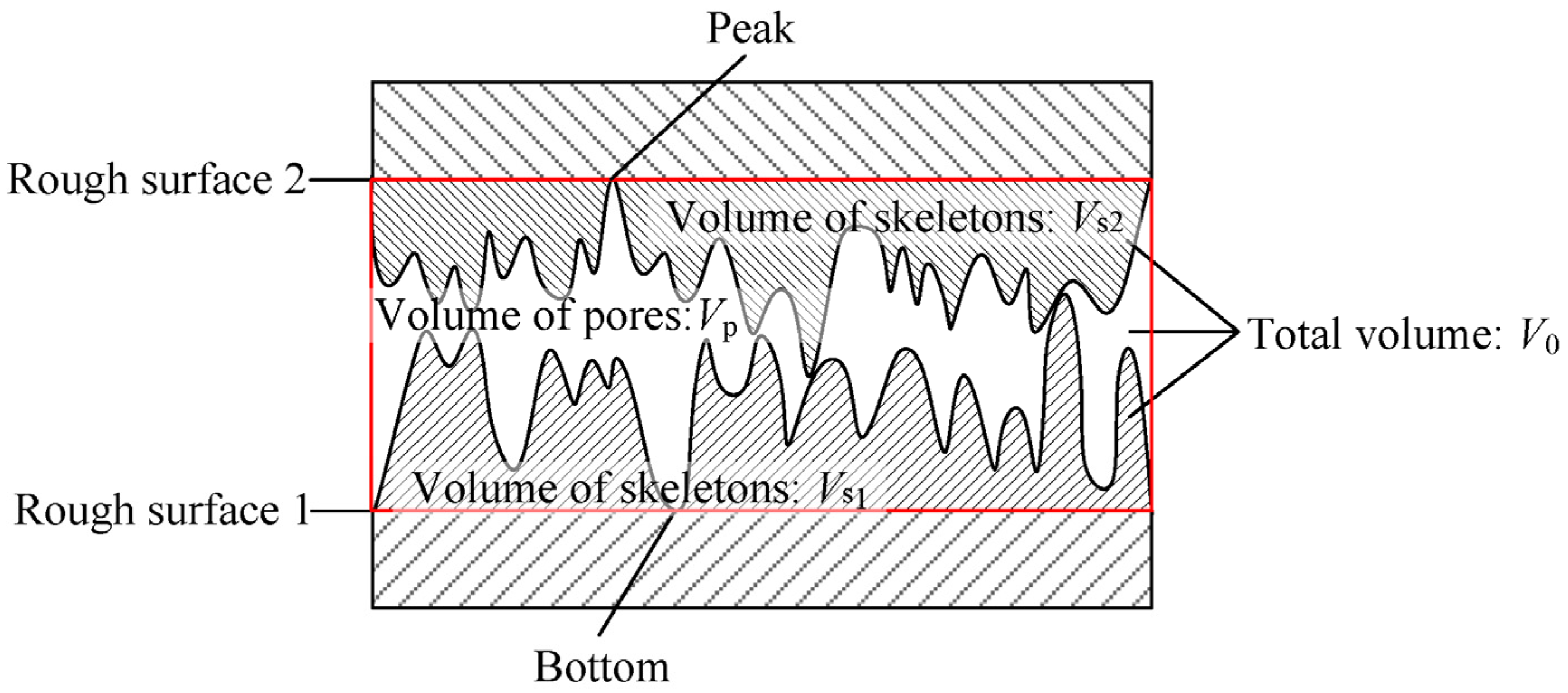
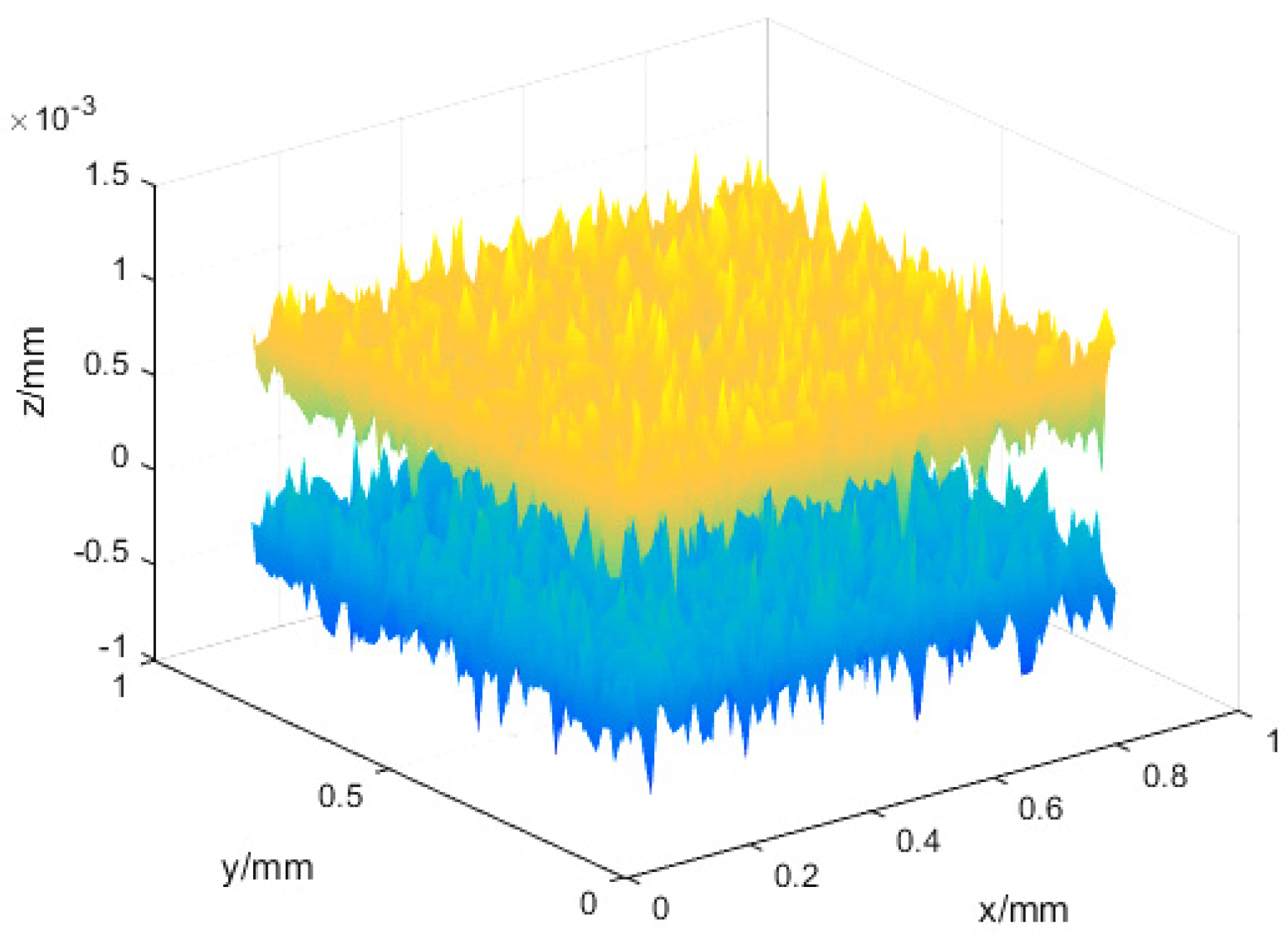
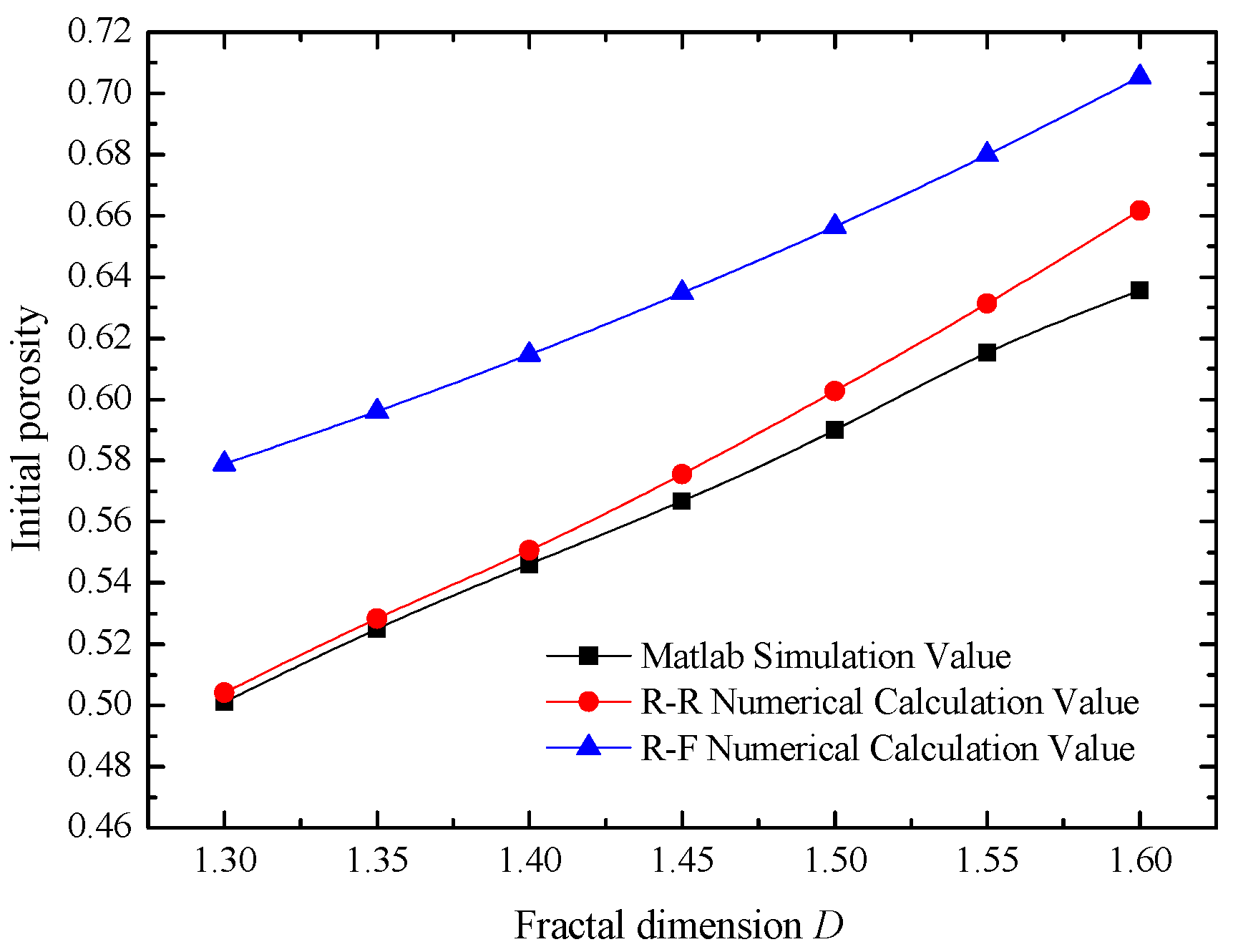
2.2. The Initial Porosity of Rough Sealing Surface
2.3. Porosity of Rough Sealing Surface after Loading
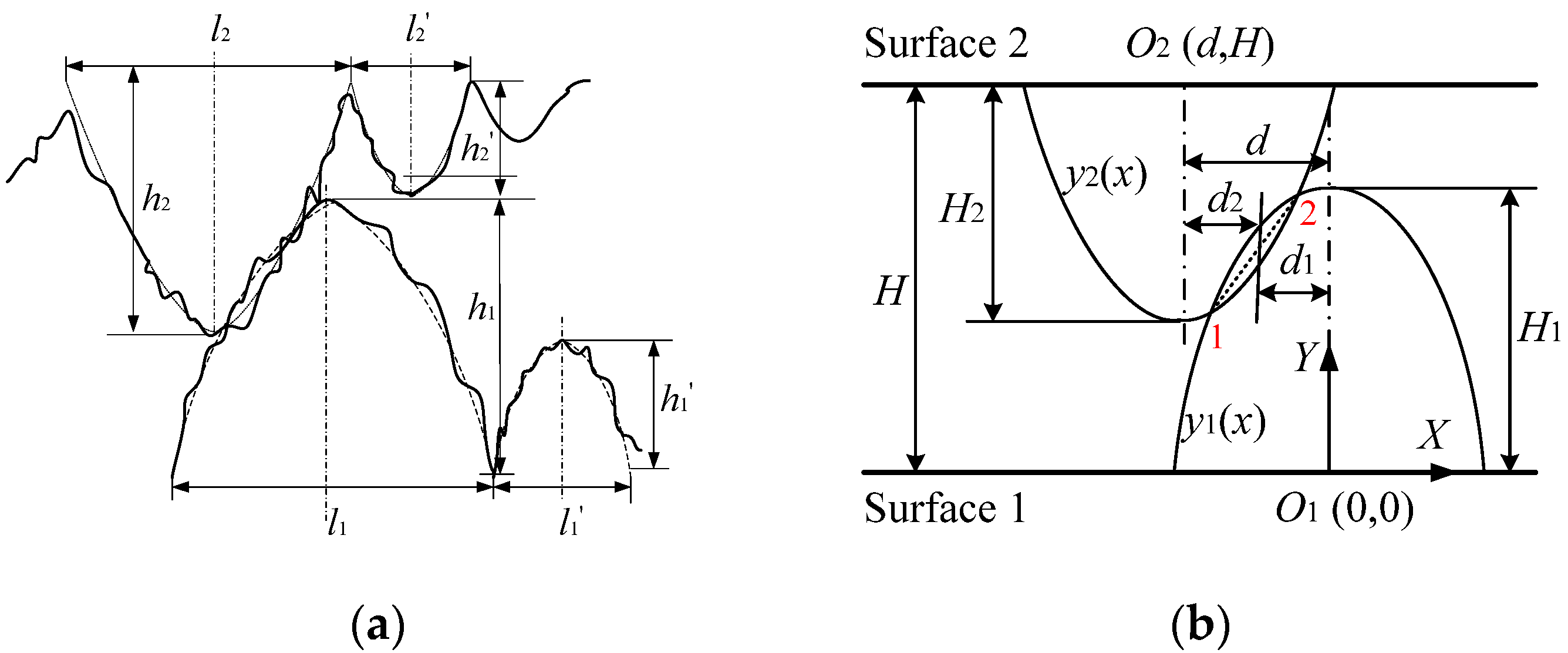
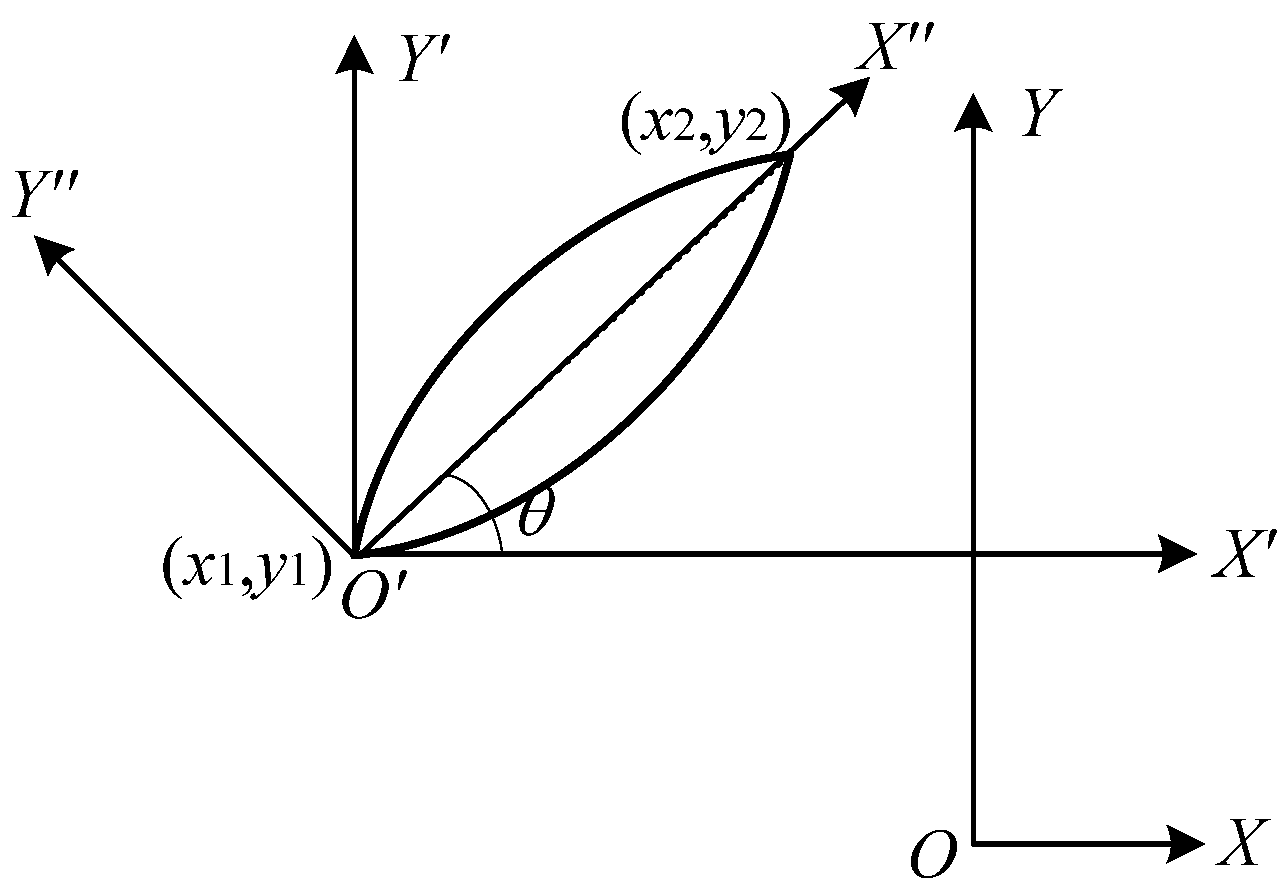
3. Geometric Model for the Shoulder-Shoulder Contact
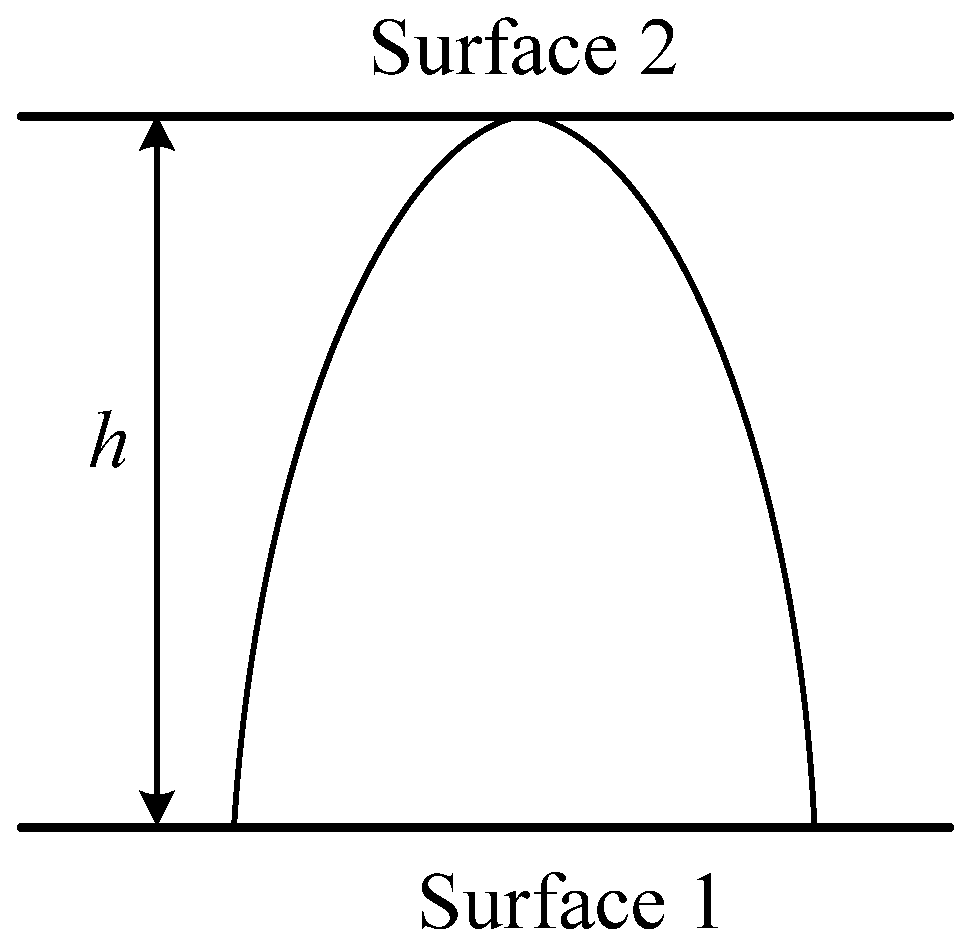
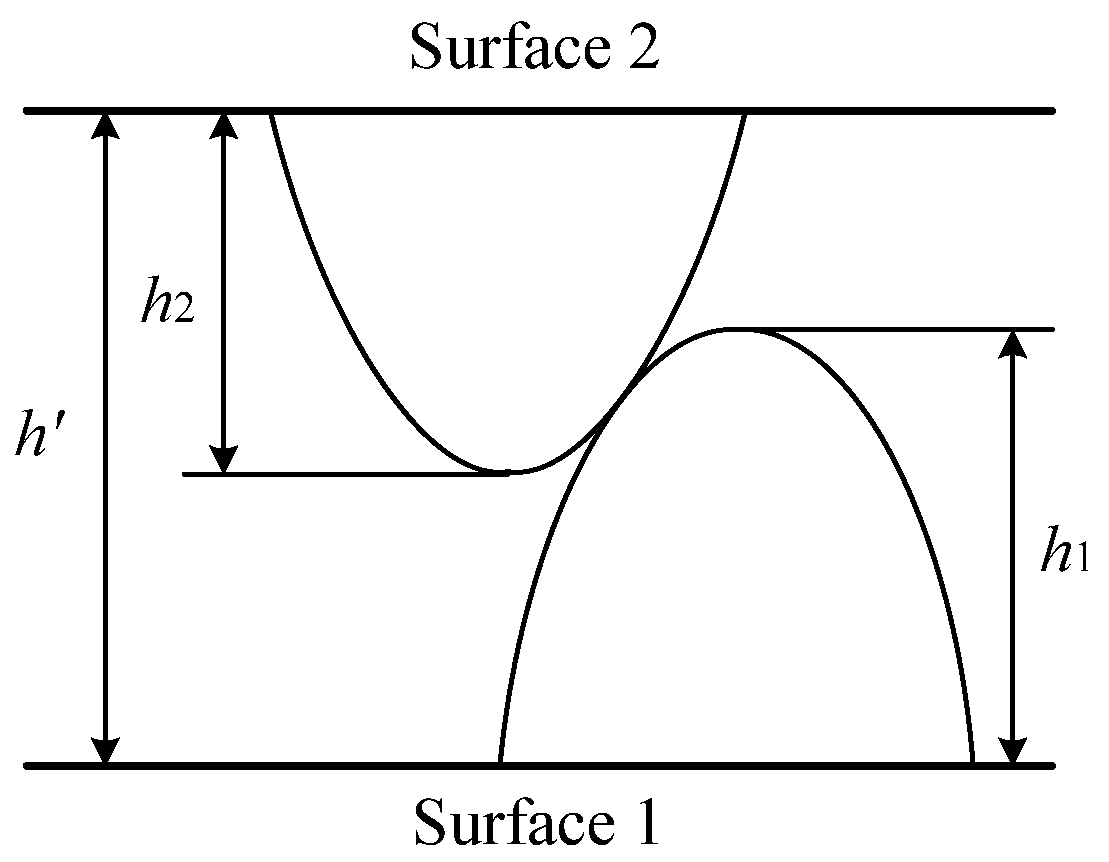
3.1. Model Simplification of the Shoulder-Shoulder Contact
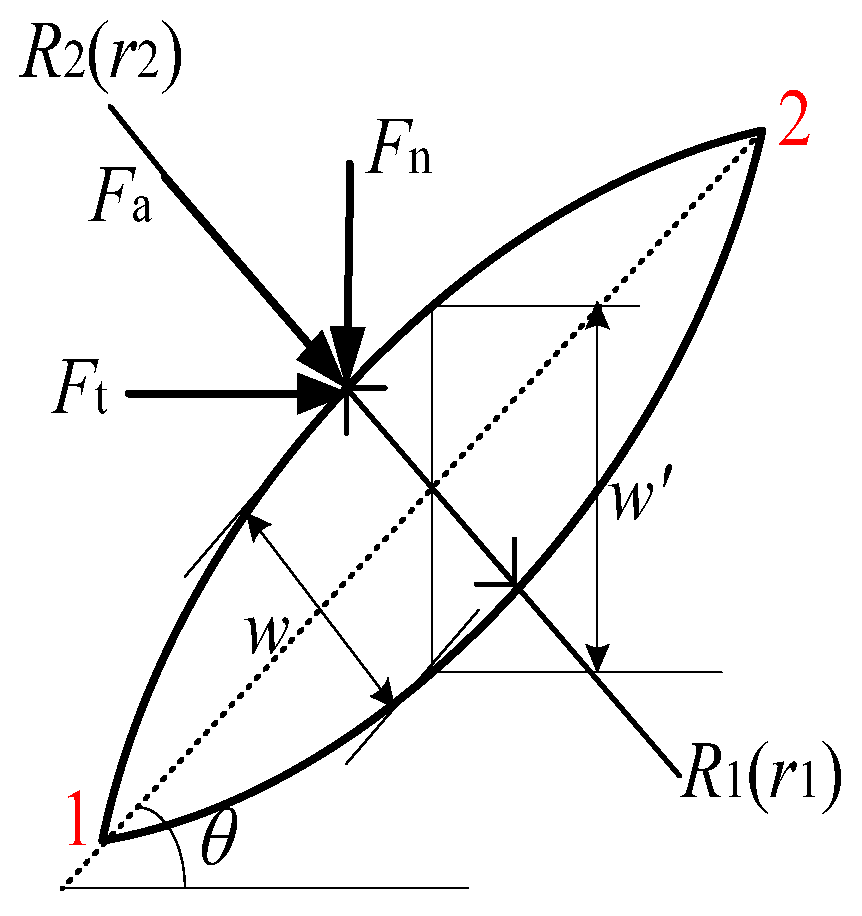
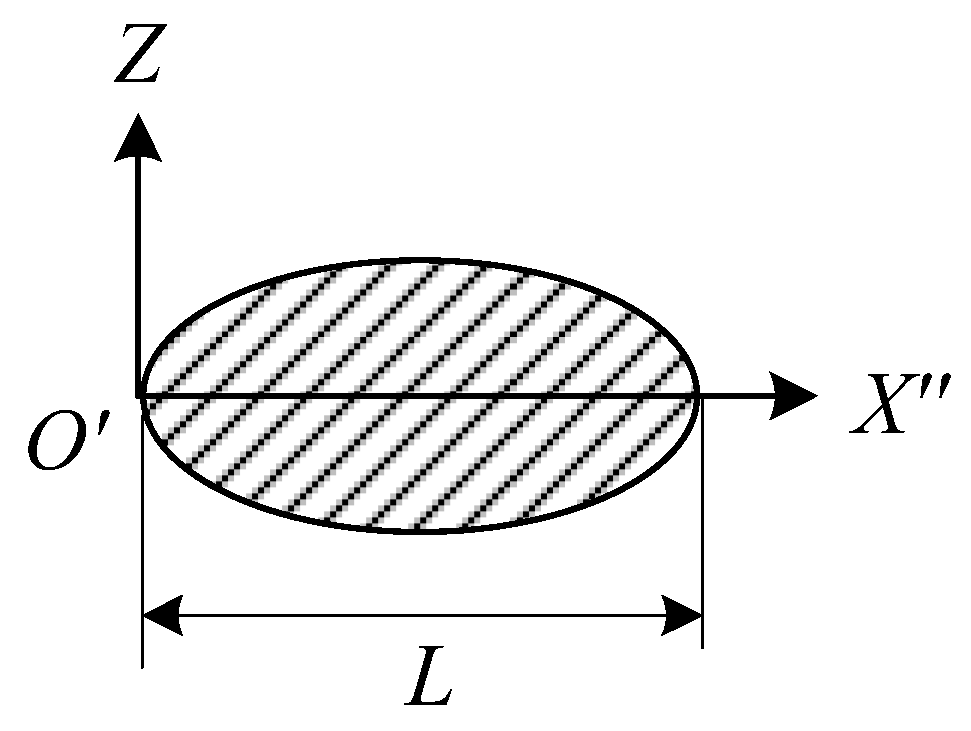
3.2. Area Solution for the Shoulder-Shoulder Contact
4. Establishment of Contact Mechanics Model
4.1. Analysis of Deformation State
4.2. Real Contact Area and Contact Load of Rough Surface
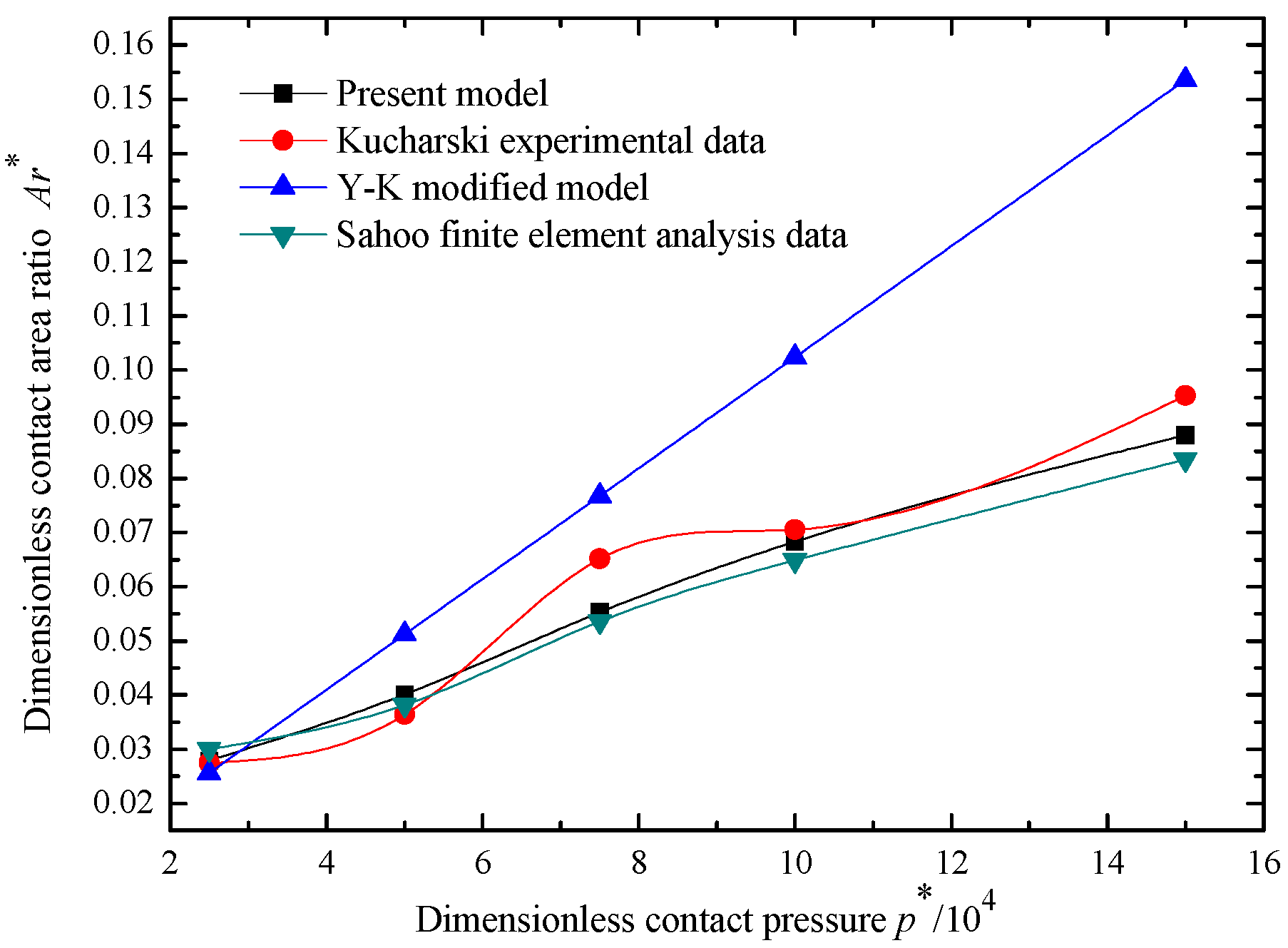
4.3. Model Validation
5. Solution of Porosity and Real Contact Area
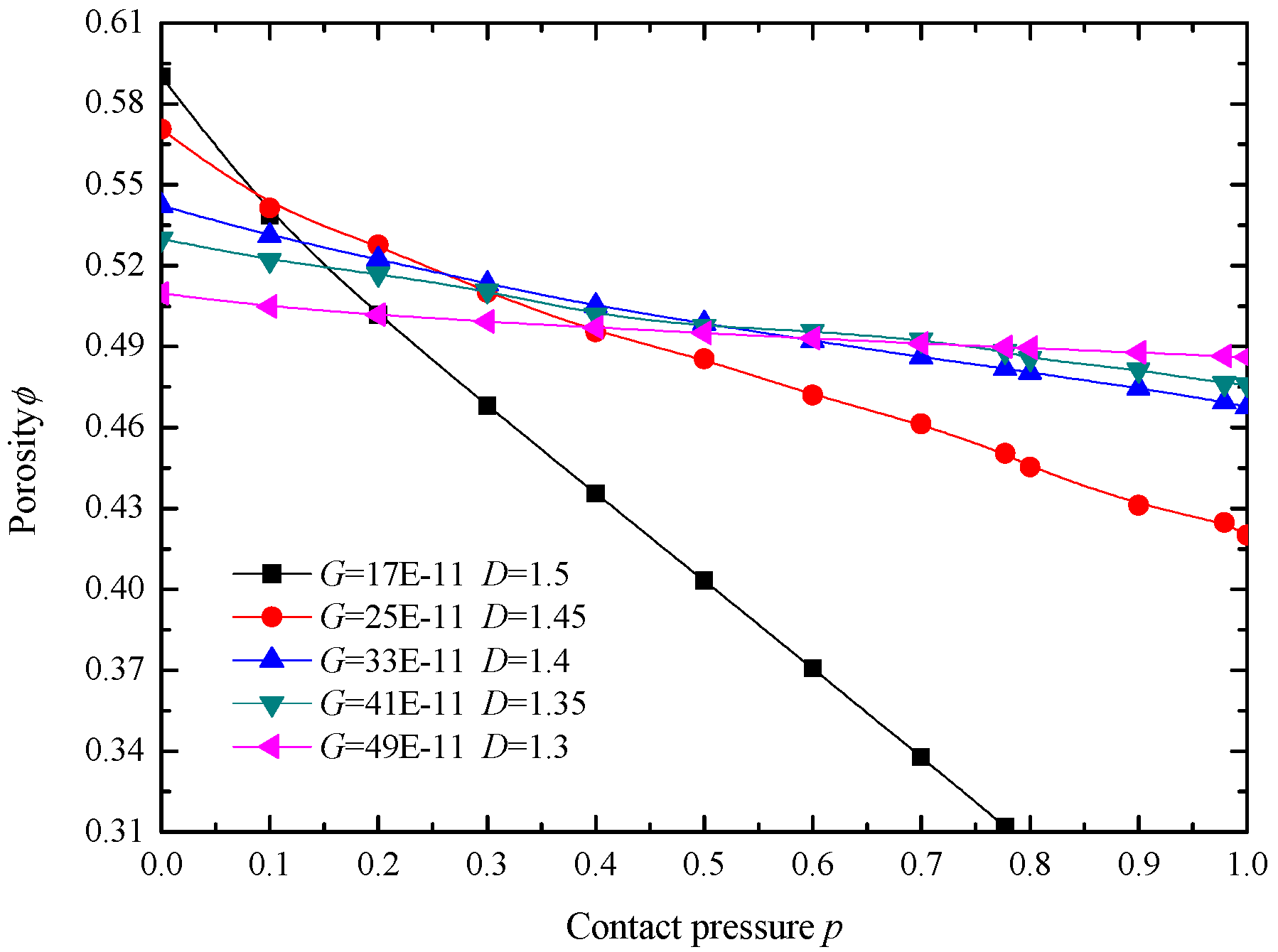
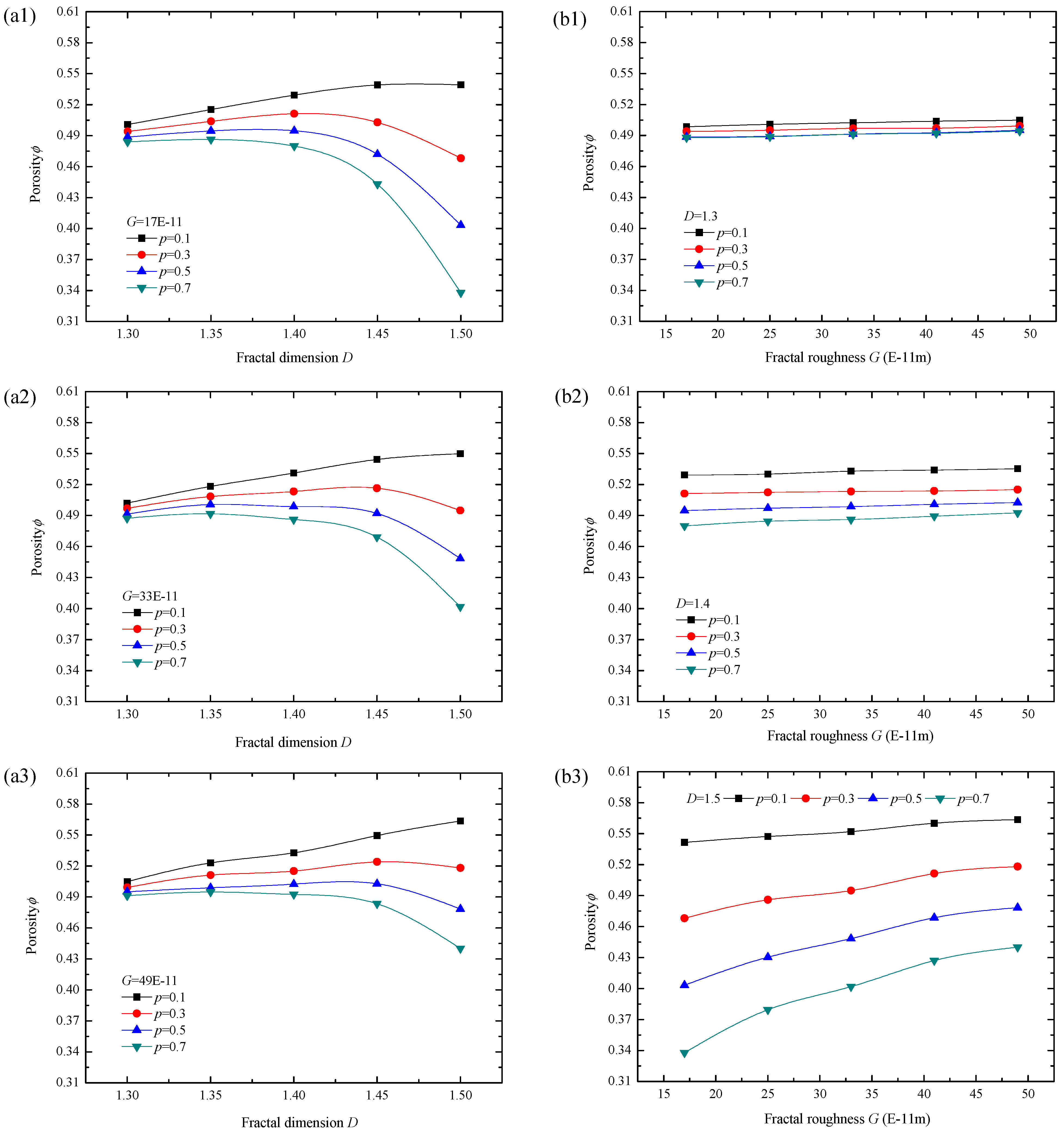
5.1. Porosity
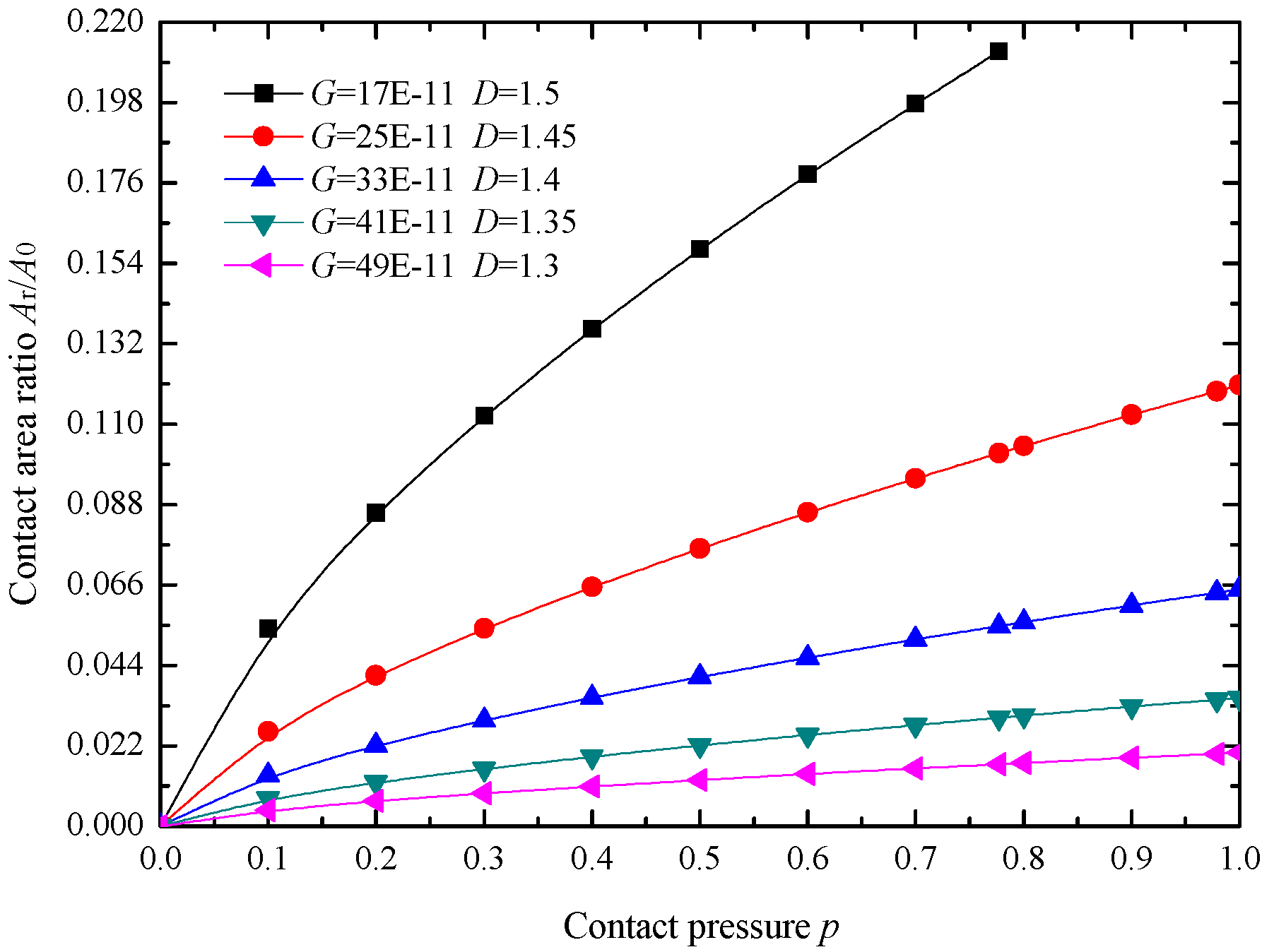
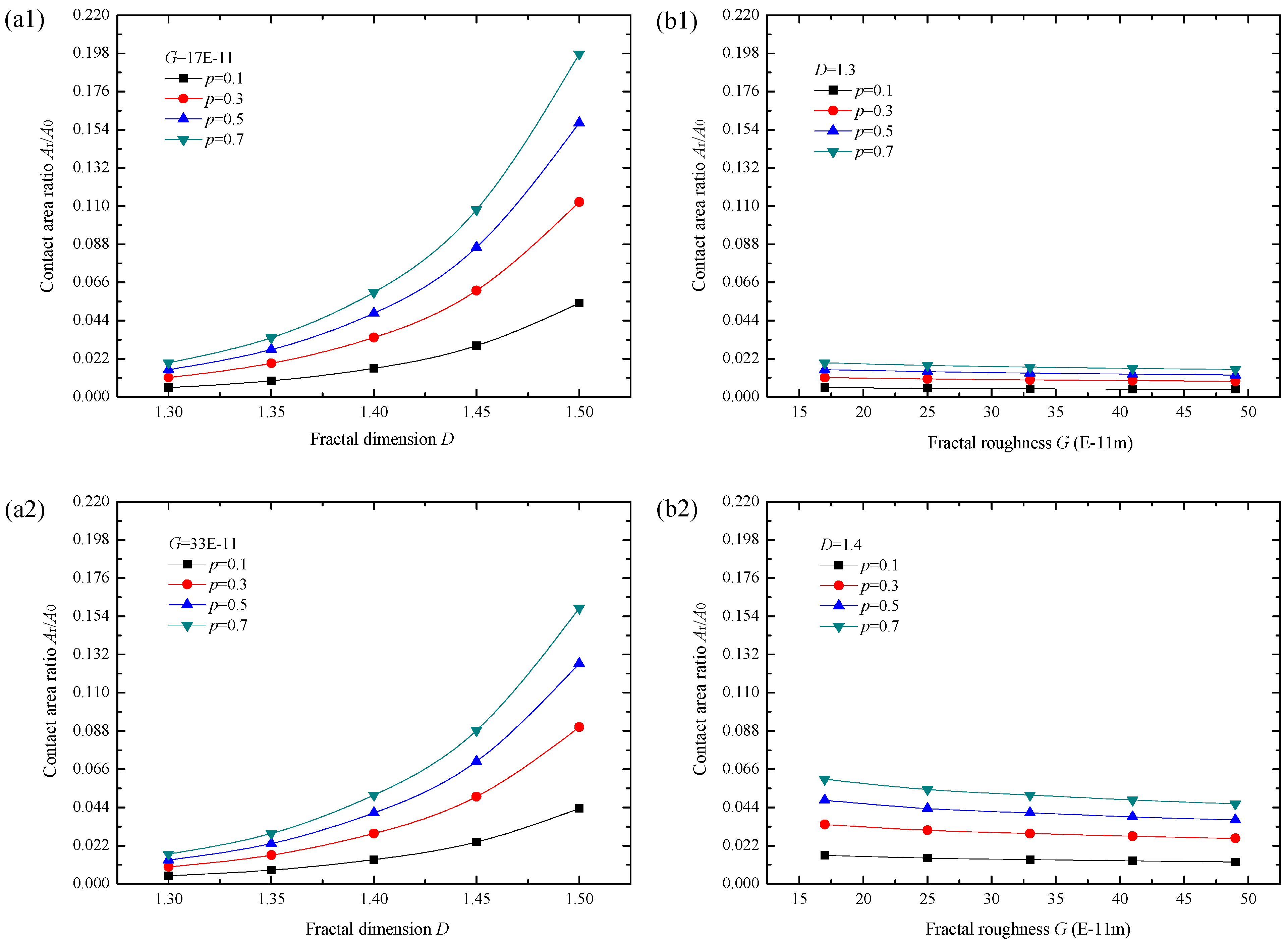
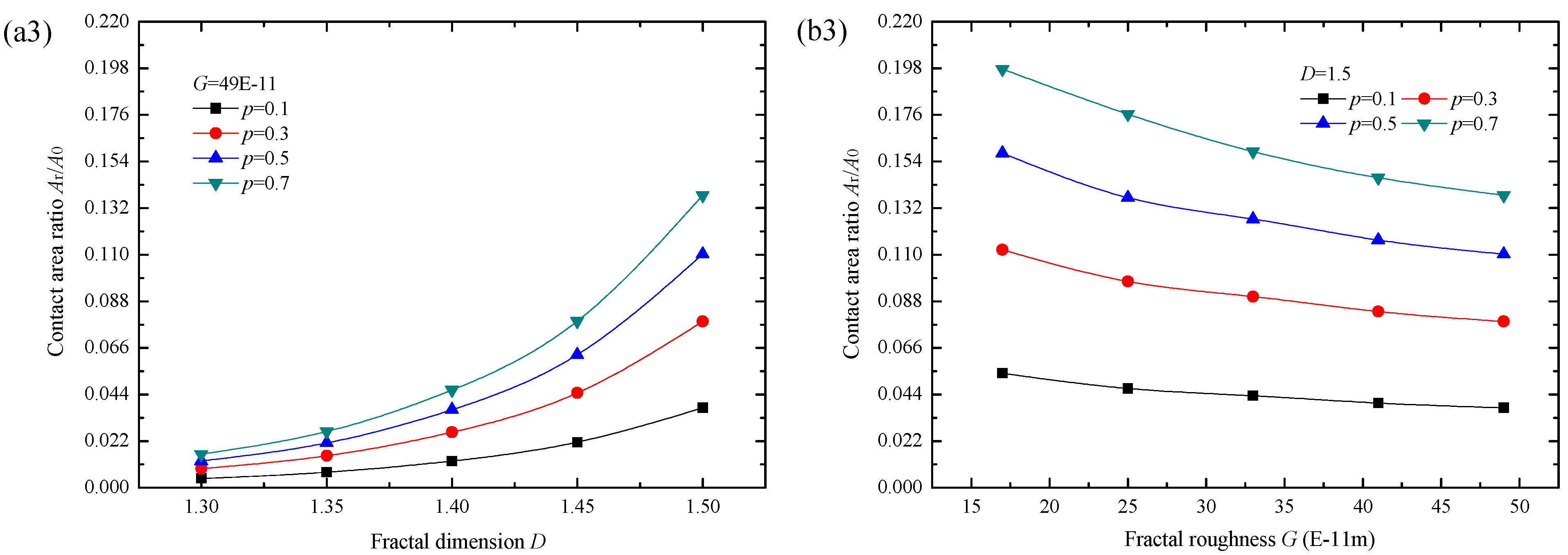
5.2. Contact Area Ratio
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zmarzły, P. Multi-Dimensional Mathematical Wear Models of Vibration Generated by Rolling Ball Bearings Made of AISI 52100 Bearing Steel. Materials 2020, 13, 5440. [Google Scholar] [CrossRef] [PubMed]
- Hertz, H. Über die Berührung fester elastischer Körperü. J. Die Reine Angew. Math. 1882, 92, 156–171. [Google Scholar]
- Greenwood, J.A.; Williamson, J.B.P. Contact of nominally flat surfaces. Proc. R. Soc. Lond. 1966, 295, 300–319. [Google Scholar]
- Greenwood, J.A.; Tripp, J.H. The elastic contact of rough spheres. ASME J. Appl. Mech. 1967, 34, 153–159. [Google Scholar] [CrossRef]
- Bush, A.W.; Gibson, R.D.; Keogh, G.P. Strong anisotropic rough surface. ASME J. Tribol. 1979, 101, 15–20. [Google Scholar]
- Pullen, J.; Williamson, J.B.P. On the plastic contact of rough surfaces. Proc. R. Soc. Lond. 1972, 327, 159–173. [Google Scholar]
- Chang, W.R.; Etsion, I.; Bogy, D.B. An elastic-plastic model for the contact of rough surfaces. ASME J. Tribol. 1987, 109, 257–263. [Google Scholar] [CrossRef]
- Zhao, Y.W.; Chang, L. An model of asperity interactins in elastic-plastic contact of rough surfaces. ASME J. Tribol. 2001, 123, 857–864. [Google Scholar] [CrossRef]
- Zhao, Y.; Maietta, D.M.; Chang, L. An asperity microcontact model incorporating the transition from elastic deformation to fully plastic flow. J. Tribol. 2000, 122, 86–93. [Google Scholar] [CrossRef]
- Ciavarella, M.; Greenwood, J.A.; Paggi, M. Inclusion of "interaction" in the Greenwood and Williamson contact theory. Wear 2008, 265, 729–735. [Google Scholar] [CrossRef]
- Vakis, A.I. Asperity Interaction and substrate deformation in statistical summation models of contact between rough surfaces. J. Appl. Mech. Trans. ASME 2014, 81, 041012. [Google Scholar] [CrossRef]
- Tian, X.; Wang, W.; Fu, W.; Gao, Z.; Lou, L.; Wu, J.; Li, P. Contact Stiffness Model of Mechanical Joint Surfaces Considering the Asperity Interactions. J. Mech. Eng. 2017, 17, 149–159. [Google Scholar] [CrossRef]
- Song, H.; Vakis, A.; Liu, X.; Van der Giessen, E. Statistical model of rough surface contact accounting for size-dependent plasticity and asperity interaction. J. Mech. Phys. Solids 2017, 106, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Etsion, I.; Kligerman, Y.; Kadin, Y. Unloading of an elastic-plastic loaded spherical contact. Int. J. Solids Struct. 2005, 42, 3716–3729. [Google Scholar] [CrossRef]
- Kadin, Y.; Kligerman, Y.; Etsion, I. Multiple loading-unloading of an elastic-plastic spherical contact. Int. J. Solids Struct. 2006, 43, 7119–7127. [Google Scholar] [CrossRef] [Green Version]
- Shi, J.; Cao, X.; Hu, Y.; Zhu, H. Statistical analysis of tangential contact stiffness of joint surfaces. Arch. Appl. Mech. 2015, 85, 1997–2008. [Google Scholar] [CrossRef]
- Xiao, H.F.; Sun, Y.Y. On the normal contact stiffness and contact resonance frequency of rough surface contact based on asperity micro-contact statistical models. Eur. J. Mech. A Solids 2019, 75, 450–460. [Google Scholar] [CrossRef]
- Song, Z.; Komvopoulos, K. Adhesive contact of an elastic semi infinite solid with a rigid roughsurface: Strength of adhesion and contact instabilities. Int. J. Solids Struct. 2014, 51, 1197–1207. [Google Scholar] [CrossRef] [Green Version]
- Jin, F.; Zhang, W.; Wan, Q.; Guo, X. Adhesive contact of a power law graded elastic half-space with arandomly rough rigid surface. Int. J. Solids Struct. 2016, 81, 244–249. [Google Scholar] [CrossRef]
- Xiao, H.F.; Sun, Y.; Xu, J.W. An elastoplastic contact model for rough surface contact with continuous, monotonous and smooth stiffness. J. Cent. South Univ. (Sci. Technol.) 2019, 50, 1343–1350. [Google Scholar]
- Zhu, S.G.; Ni, L.Y. A Static Friction Model for Unlubricated Contact of Random Rough Surfaces at Micro/Nano Scale. Micromachines 2021, 12, 368. [Google Scholar] [CrossRef]
- Majumdar, A.; Bhushan, B. Fractal model of elastic-plastic contact between rough surfaces. J. Tribol. Trans. ASME 1991, 113, 1–11. [Google Scholar] [CrossRef]
- Wang, S.; Komvopoulosk, K. A fractal theory of the interfacial temperature distribution in the slow sliding regime: Part I elastic contact and heat transfer analysis. ASME J. Tribol. 1994, 116, 812–823. [Google Scholar] [CrossRef]
- Yan, W.; Komvopoulos, K. Contact analysis of elastic-plastic fractal surfaces. J. Appl. Phys. 1998, 84, 3617–3624. [Google Scholar] [CrossRef]
- Zhu, Y.Q.; Ma, B.J.; Jiang, L.Y. The elastic elastoplastic and plastic fractal contact models for rough surface. J. Xi’an Inst. Technol. 2001, 21, 150–157. [Google Scholar]
- Miao, X.M.; Huang, X.D.; Yuan, H. Fractal Contact Model of Joint Interfaces Considering Elastic-plastic Deformation of Asperities. J. Agric. Mach. 2013, 1. [Google Scholar]
- Tian, H.; Yu, Y.; Chen, T.; Zheng, J.; Zhang, Y.; Zhao, C. Contact Problem Between Two Spheres Considering Surface Roughness and Geometrical Curvature. J. Xi’an Jiaotong Univ. 2016, 50, 1–7. [Google Scholar]
- Liu, P.; Zhao, H.; Huang, K.; Chen, Q. Research on normal contact stiffness of rough surface considering friction based on fractal theory. Appl. Surf. Sci. 2015, 349, 43–48. [Google Scholar] [CrossRef]
- Morag, Y.; Etsion, I. Resolving the contradiction of asperities plastic to elastic mode transition in current contact models of fractal rough surfaces. Wear 2007, 262, 624–629. [Google Scholar] [CrossRef]
- Liou, J.L.; Chi, M.T.; Lin, J.F. A microcontact model developed for sphere- and cylinder-based fractal bodies in contact with a rigid flat surface. Wear 2010, 268, 431–442. [Google Scholar] [CrossRef]
- Huang, J.; Gao, C.; Chen, J.; Zeng, X. Analysis of real contact area between an elasto-plastic rough body and an elasto-plastic flat body. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2014, 228, 1174–1179. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, Y.; Chen, X.; Yu, H. A spherical conformal contact model considering frictional and microscopic factors based on fractal theory. Chaos Solitons Fractals 2018, 111, 96–107. [Google Scholar] [CrossRef]
- Yuan, Y.; Zhang, L.H.; Xu, Y.Q. Mechanical Model of Contact between a Sphere-Based Fractal Rough Surface and a Rigid Flat Surface. J. Xi’an Jiaotong Univ. 2019, 53, 176–186. [Google Scholar]
- Zhang, Y.; Si, L.; Zhang, X.; Li, J.; Wang, W. Investigations of the adhesive contact behavior of elastic layered media with surface roughness. J. Tribol.-Trans. ASME 2019, 141, 044504. [Google Scholar] [CrossRef]
- Wang, H.; Jia, P.; Wang, L.; Yun, F.; Wang, G.; Liu, M.; Wang, X. Modeling of the Loading–Unloading Contact of Two Cylindrical Rough Surfaces with Friction. Appl. Sci. 2020, 10, 742. [Google Scholar] [CrossRef] [Green Version]
- Sepehria, A.; Farhang, K. Closed-form Equations for three dimensional elastic-plastic contact of nominally flat rough surfaces. ASME J. Tribol. 2009, 131, 041402. [Google Scholar] [CrossRef]
- Zhuang, Y.; Li, B.T.; Hong, J.; Yang, G.Q.; Zhu, L.B.; Liu, H.J. A Normal Contact Stiffness Model of the Interface. J. Xi’an Jiaotong Univ. 2013, 47, 180–186. [Google Scholar]
- Zhu, L.B.; Zhuang, Y.; Hong, J.; Yang, G.Q. Elastic-Plastic Model for Contact of two Asperities Considering Shoulder-Shoulder Contact. J. Xi’an Jiaotong Univ. 2013, 11, 48–52+104. [Google Scholar]
- Hu, Q.; Sun, J.J.; Ma, C.B.; Yu, B. Theoretical Prediction of Mixed Frictional Heat of Mechanical Seals Based on Shoulder-shoulder Contact Model of Asperities. J. Mech. Eng. 2017, 53, 102–108. [Google Scholar] [CrossRef]
- Zuo, X.; Zhou, Y.; Ma, C.; Fang, H. Dynamic Identification of Wear State Based on Nonlinear Parameters. Fractals-Complex Geom. Patterns Scaling Nat. Soc. 2019, 27, 1950075. [Google Scholar] [CrossRef]
- Ge, S.R.; Zhu, H. Fractal in Tribology; China Machine Press: Beijing, China, 2005. [Google Scholar]
- Hill, R. The Mathematical Theory of Plasticity; Oxford University Press: London, UK, 1950. [Google Scholar]
- Kucharski, S.; Klimczak, T.; Polijaniuk, A.; Kaczmarek, J. Finite-elements model for the contact of rough surfaces. Wear 1994, 177, 1–13. [Google Scholar] [CrossRef]
- Sahoo, P.; Ghosh, N. Finite element contact analysis of fractal surfaces. J. Phys. D Appl. Phys. 2007, 40, 4245–4252. [Google Scholar] [CrossRef]
















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, Q.; Sun, J.; Ji, Z. Mechanics Analysis of Rough Surface Based on Shoulder-Shoulder Contact. Appl. Sci. 2021, 11, 8048. https://doi.org/10.3390/app11178048
Yu Q, Sun J, Ji Z. Mechanics Analysis of Rough Surface Based on Shoulder-Shoulder Contact. Applied Sciences. 2021; 11(17):8048. https://doi.org/10.3390/app11178048
Chicago/Turabian StyleYu, Qiuping, Jianjun Sun, and Zhengbo Ji. 2021. "Mechanics Analysis of Rough Surface Based on Shoulder-Shoulder Contact" Applied Sciences 11, no. 17: 8048. https://doi.org/10.3390/app11178048
APA StyleYu, Q., Sun, J., & Ji, Z. (2021). Mechanics Analysis of Rough Surface Based on Shoulder-Shoulder Contact. Applied Sciences, 11(17), 8048. https://doi.org/10.3390/app11178048