
A New Inspiration in Bionic Shock Absorption Midsole Design and Engineering


 ,
,  and
and
Abstract
:1. Introduction
2. Materials and Methods
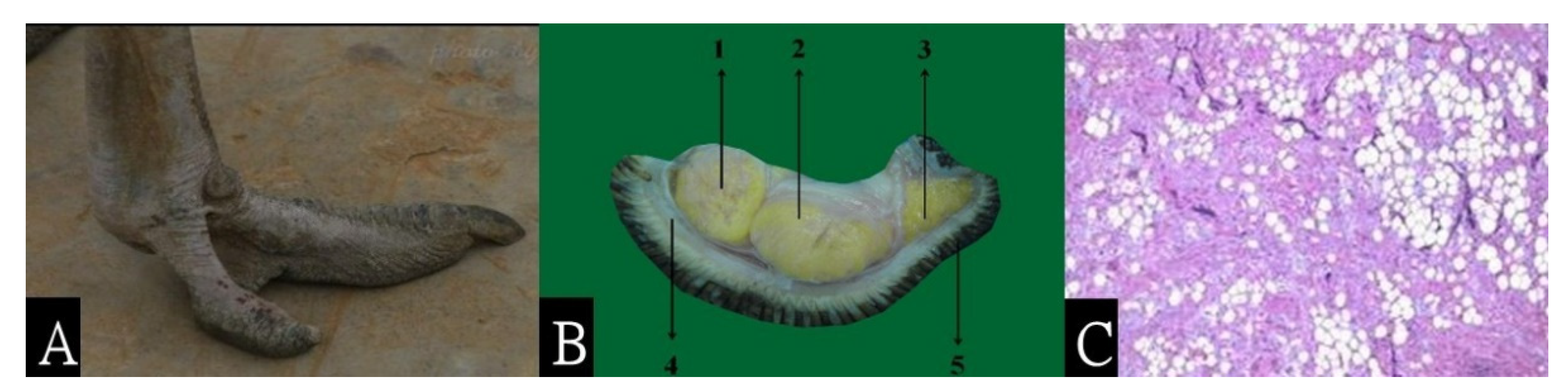
2.1. Ostrich Foot Dissection
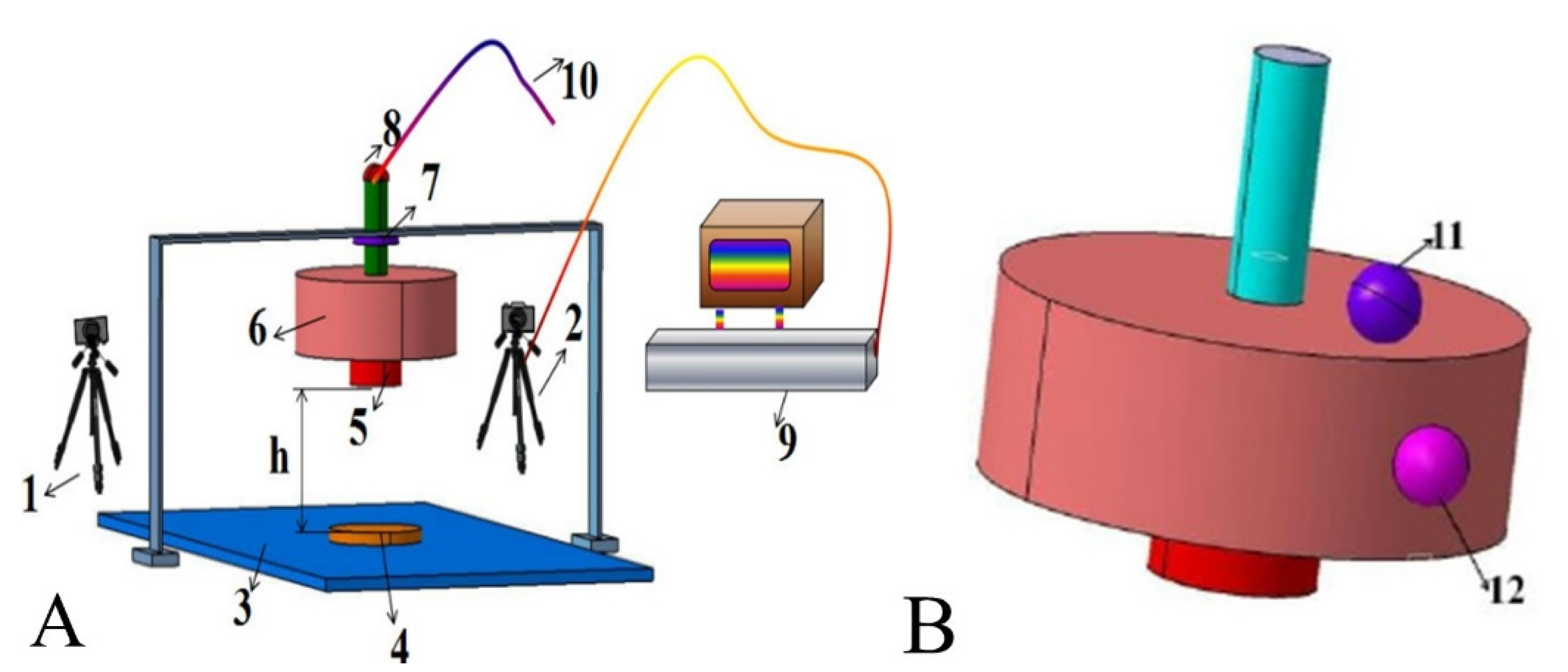
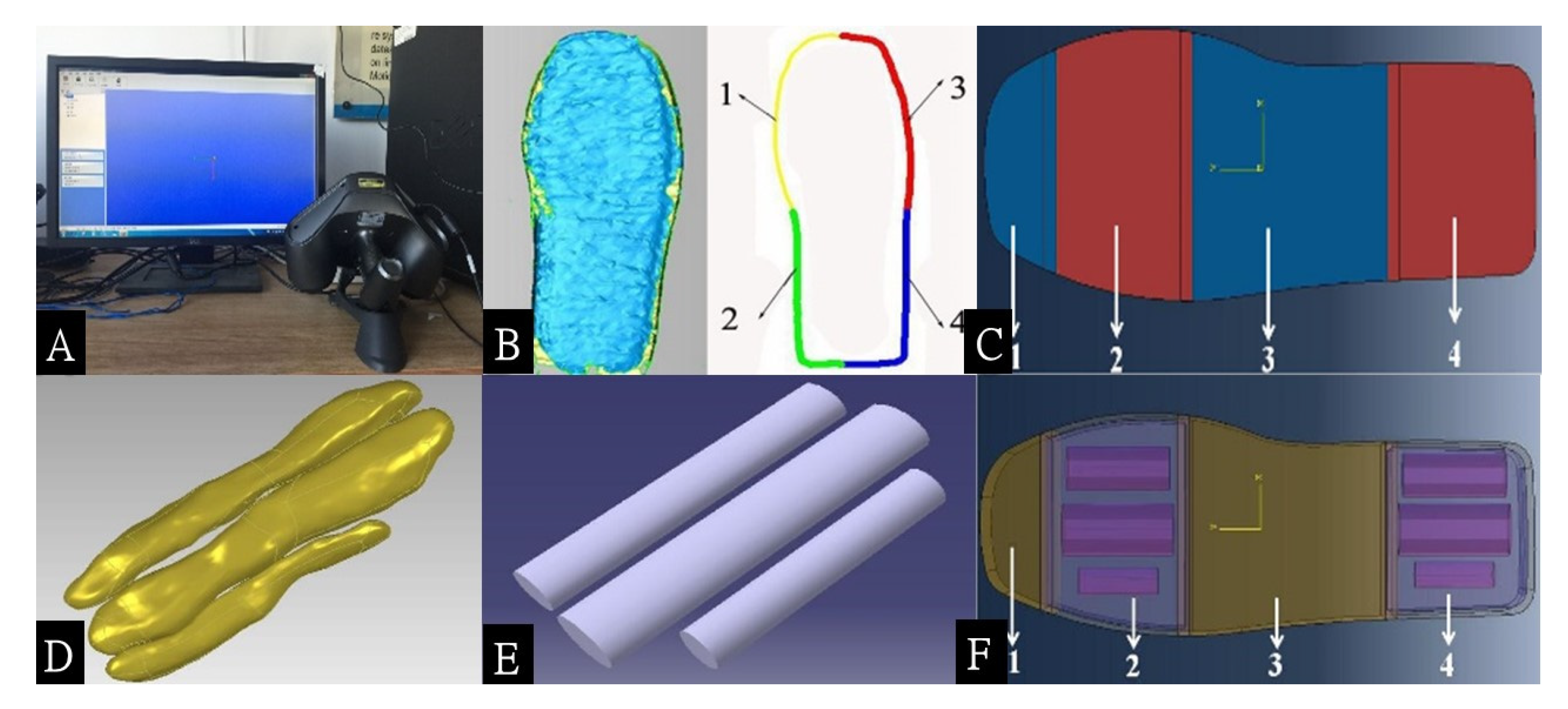
2.2. Physics Tests and Numerical Simulations
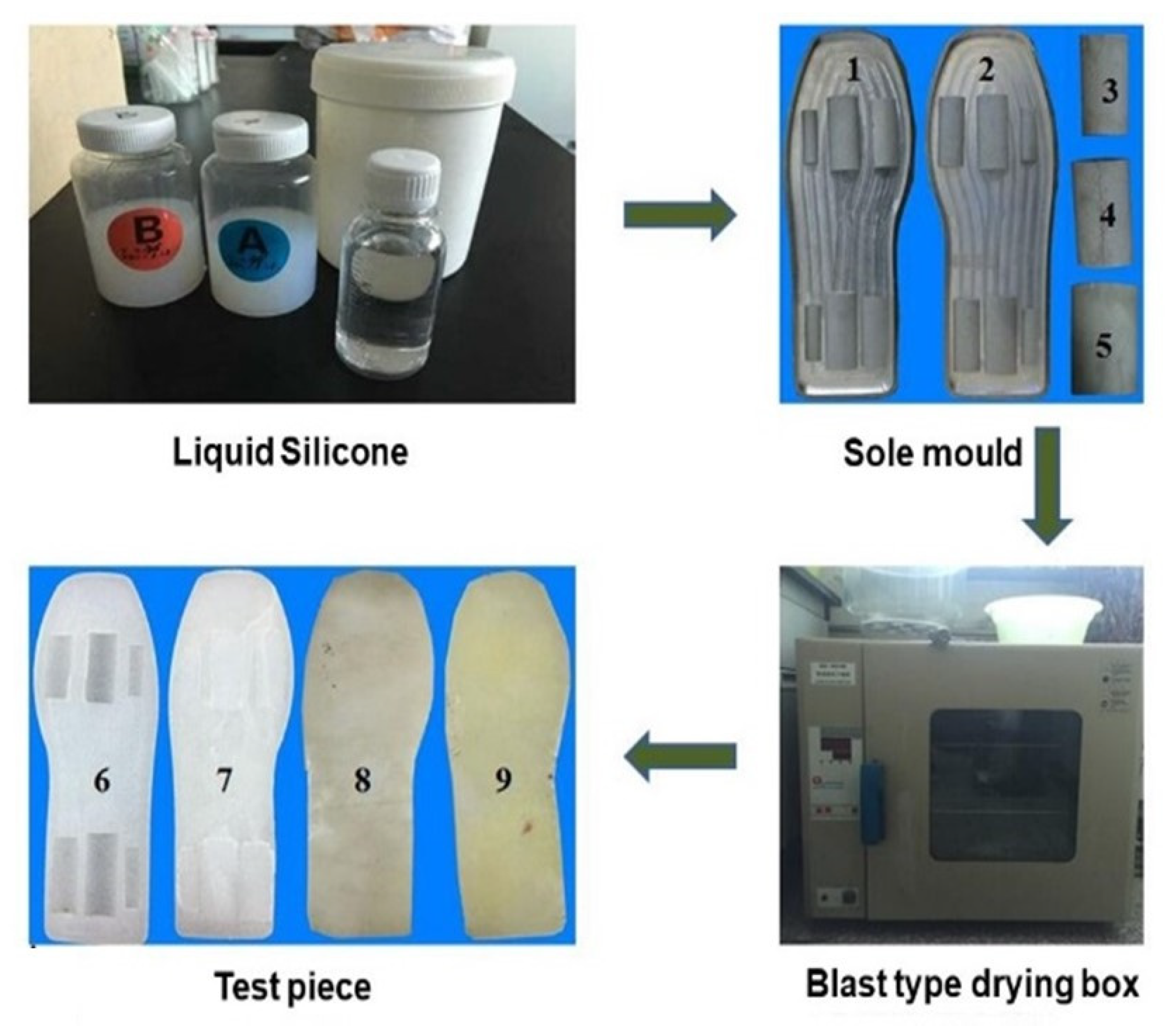
2.3. Bionic Engineering Procedures
2.4. Participants
2.5. Plantar Pressure Test Procedures
3. Results and Discussion
3.1. Ostrich Foot Dissection
3.2. Bionic Engineering Procedures
3.3. Physics Tests and Numerical Simulations
3.3.1. Finite Element Method
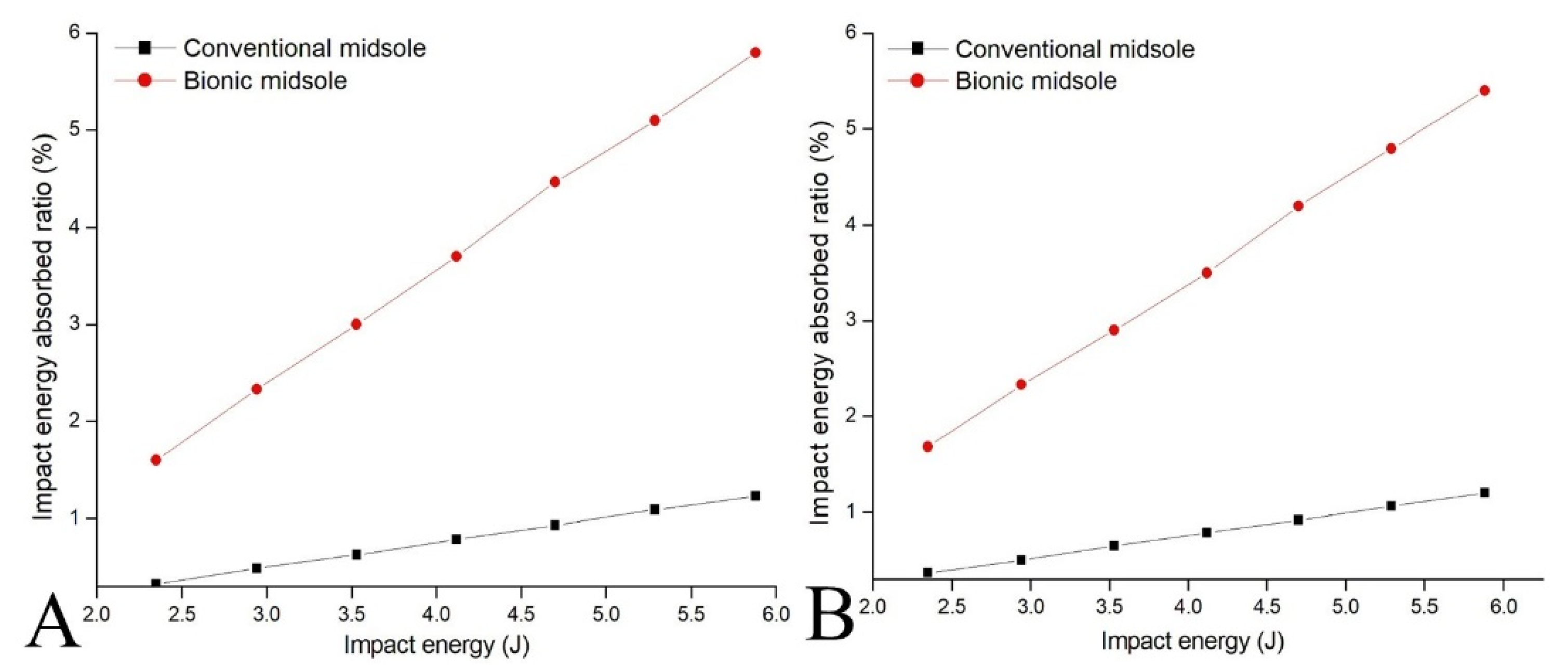
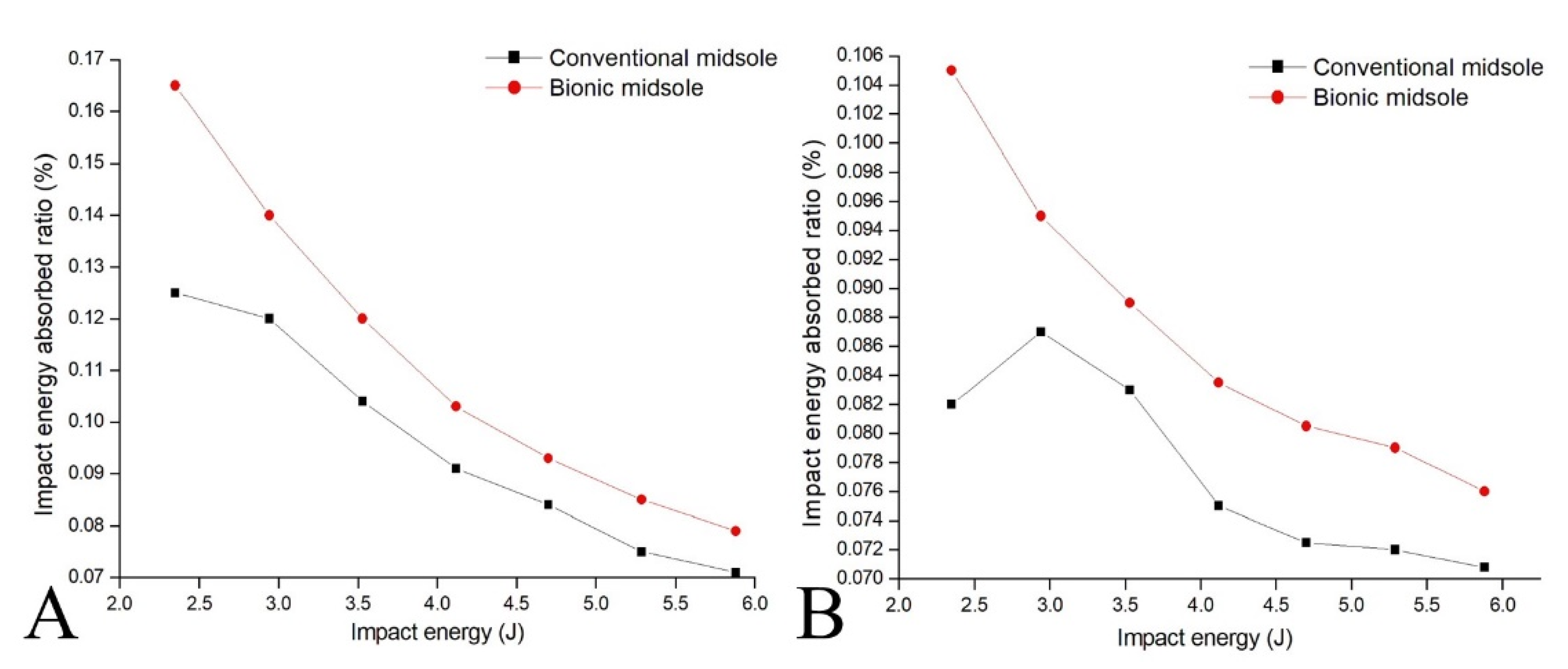
3.3.2. Impact Experiments
3.3.3. Plantar Pressure Tests
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lieberman, D.E.; Venkadesan, M.; Werbel, W.A.; Werbel, W.A.; Daoud, A.I.; D’Andrea, S.; Davis, I.S.; Mang’Eni, R.O.; Pitsiladis, Y. Foot strike patterns and collision forces in habitually barefoot versus shod runners. Nature 2010, 463, 531–535. [Google Scholar] [CrossRef]
- Xu, X.; Zhang, C.; Derazkola, H.A.; Demiral, M.; Zain, A.M.; Khan, A. UFSW tool pin profile effects on properties of aluminium-steel joint. Vacuum 2021, 192, 110460. [Google Scholar]
- Xu, X.; Zhang, C.; Derazkola, H.A.; Demiral, M.A.; Khan, A. Dispersion of waves characteristics of laminated composite nanoplate. Steel Compos. Struct. 2021, 40, 355–367. [Google Scholar]
- Gupta, N.A. functionally graded syntactic foam material for high energy absorption under compression. Mater. Lett. 2007, 61, 979–982. [Google Scholar] [CrossRef]
- Zhang, S.; Clowers, K.; Kohstall, C.; Yu, Y.J. Effects of various midsole densities of basketball shoes on impact attenuation during landing activities. J. Appl. Biomech. 2005, 21, 3–17. [Google Scholar] [CrossRef] [PubMed]
- Beynnon, B.D.; Vacek, P.M.; Murphy, D.; Paller, D. First-time inversion ankle ligament trauma: The effects of sex, level of competition, and sport on the incidence of injury. Am. J. Sports Med. 2005, 33, 1485–1491. [Google Scholar] [CrossRef] [PubMed]
- Rome, K.; Frecklington, M.; McNair, P.; Gow, P.; Dalbeth, N. Foot pain, impairment, and disability in patients with acute gout flares: A prospective observational study. Arthritis Care. Res. 2012, 64, 384–388. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, Y.; Leong, K.F.; Gu, Y. Construction and finite element analysis of a coupled finite element model of foot and barefoot running footwear. Proc. Inst. Mech. Eng. Part J. Sport Eng. Technol. 2018, 233, 101–109. [Google Scholar] [CrossRef]
- Sofla, F.S.; Hadadi, M.; Rezaei, I.; Azhdari, N.; Sobhani, S. The effect of the combination of whole body vibration and shoe with an unstable surface in chronic ankle instability treatment: A randomized clinical trial. BMC Sports Sci. Med. Rehab. 2021, 13, 28. [Google Scholar]
- Wong, P.L.; Chamari, K.; Mao, D.W.; Wisloff, U.; Hong, Y. Higher plantar pressure on the medial side in four soccer-related movements. Br. J. Sports Med. 2007, 41, 93–100. [Google Scholar]
- Guettler, J.H.; Ruskan, G.J.; Bytomski, J.R.; Brown, C.R.; Richardson, J.K.; Moorman, C.T. Fifth metatarsal stress fractures in elite basketball players: Evaluation of force acting on the fifth metatarsal. Am. J. Orthop. 2006, 35, 532–536. [Google Scholar]
- Cui, L. Analyzing the functional requirements of the sole of basketball shoes based on plantar pressure distribution. J. Shanxi Univ. Sci. Technol. 2010, 28, 311–315. [Google Scholar]
- Tang, Z.; Zhao, G.; Ouyang, T. Two-phase deep learning model for short-term wind direction forecasting. Renew. Energy. 2021, 173, 1005–1016. [Google Scholar] [CrossRef]
- Chiu, H.T.; Shiang, T.Y. Effects of insoles and additional shock absorption foam on the cushioning properties of sport shoes. J. Appl. Biomech. 2007, 23, 119–127. [Google Scholar] [CrossRef] [Green Version]
- Wei, Z.; Zhang, Z.; Jiang, J.; Zhang, Y.; Wang, L. Comparison of plantar loads among runners with different strike patterns. J. Sports Sci. 2019, 37, 2152–2158. [Google Scholar] [CrossRef]
- Ali, M.; Nazir, A.; Jeng, J.Y. Mechanical performance of additive manufactured shoe midsole designed using variable-dimension helical springs. Int. J. Adv. Manuf. Technol. 2020, 111, 3273–3292. [Google Scholar] [CrossRef]
- Wei, Q. An Exploration of the Relationship between the Sole Structure of Basketball Shoes and Its Shock Absorption Properties. Master’s Thesis, Shanxi University of Science & Technology, Shanxi, China, 2012. [Google Scholar]
- Ye, S. The dynamic foot pressure distribution of university students during jogging. Chin. J. Tissue Eng. Res. 2009, 13, 9109–9112. [Google Scholar]
- Zhao, C. Design and Study on Jogging Shoes Cushioned Insoles. Master’s Thesis, Shanxi University of Science & Technology, Shanxi, China, 2013. [Google Scholar]
- Wu, J.; Li, J.S. Research progress in the biomechanics of human gait during walking. Chin. J. Sports Med. 2002, 21, 305–307. [Google Scholar]
- Yu, H.B.; Zeng, Q.S.; Zheng, Z.Y.; Pan, Z.S.; Yang, L. Relationship between foot presure and subjective comfort of shoes during 20 km running. J. Beijing Sport Univ. 2018, 41, 70–75. [Google Scholar]
- Liu, L. Effects on the Shoe Sole’s Shock Absorption Structures on the Shock Absorption System of Human Feet. Master’s Thesis, Shanxi University of Science & Technology, Shanxi, China, 2015. [Google Scholar]
- Gosman, J.H.; Hubbell, Z.R.; Shaw, C.N.; Ryan, T.M. Development of cortical bone geometry in the human femoral and tibial diaphysis. Anat. Rec. 2013, 296, 774–787. [Google Scholar] [CrossRef] [PubMed]
- Brassey, C.A.; Margetts, L.; Kitchener, A.C.; Withers, P.J.; Manning, P.L.; Sellers, W.I. Finite element modelling versus classic beam theory: Comparing methods for stress estimation in a morphologically diverse sample of vertebrate long bones. J. R. Soc. Interface 2013, 10, 20120823. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Main, R.P.; Lynch, M.E.; Mc, V.D.M. In vivo tibial stiffness is maintained by whole bone morphology and cross-sectional geometry in growing female mice. J. Biomech. 2010, 43, 2689–2694. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shergold, O.A.; Fleck, N.A.; Radford, D. The uniaxial stress versus strain response of pig skin and silicone rubber at low and high strain rates. Int. J. Impact Eng. 2006, 32, 1384–1402. [Google Scholar] [CrossRef]
- Nigg, B.M.; Stefanyshyn, D.; Cole, G.; Miller, J. The effect of material characteristics of shoe soles on muscle activation and energy aspects during running. J. Biomech. 2003, 36, 569–575. [Google Scholar] [CrossRef]
- Kernozek, T.W.; Vannatta, C.N.; Gheidi, N.; Kraus, S.; Aminaka, N. Plantar loading changes with alterations in foot strike patterns during a single session in habitual rear foot strike female runners. Phys. Ther. Sport 2016, 18, 32–37. [Google Scholar] [CrossRef]
- Almeida, M.O.; Davis, I.S.; Lopes, A.D. Biomechanical differences of foot-strike patterns during running: A systematic review with meta-analysis. J. Orthop. Sports Phys. Ther. 2015, 45, 738–755. [Google Scholar] [CrossRef] [Green Version]
- Munro, C.F.; Miller, D.I.; Fuglevand, A.J. Ground reaction forces in running: A reexamination. J. Biomech. 1987, 20, 147–155. [Google Scholar] [CrossRef]
- Zadpoor, A.A.; Nikooyan, A.A. The relationship between lower-extremity stress fractures and the ground reaction force: A systematic review. Clin. Biomech. 2011, 26, 23–28. [Google Scholar] [CrossRef]
- Daoud, A.I.; Geissler, G.J.; Wang, F.; Saretsky, J.; Daoud, Y.A.; Lieberman, D.E. Foot strike and injury rates in endurance runners: A retrospective study. Med. Sci. Sports Exerc. 2012, 44, 1325–1334. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Schaller, N.U. Birds on the run: What makes ostriches so fast? Sci. School 2011, 21, 12–16. [Google Scholar]
- Lamas, L.P.; Main, R.P.; Hutchinson, J.R. Ontogenetic scaling patterns and functional anatomy of the pelvic limb musculature in emus (Dromaius novaehollandiae). PeerJ 2014, 2, e716. [Google Scholar] [CrossRef] [PubMed] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Density ρ (g/mm3) | Elastic Modulus E (MPa) | Poisson’s Ratio γ |
|---|---|---|---|
| Cushioning structure | 7.30 × 10−4 | 3.8 | 0.47 |
| Fascial structure | 7.45 × 10−4 | 6.4 | 0.4 |
| Skin structure | 8.07 × 10−4 | 8.3 | 0.4 |
| Loading | 3.56 × 10−1 | Rigid body | -- |
| Ground support | 7.85 × 10−3 | Rigid body | -- |
| Toe Pad | Length (mm) M ± SD | Width (mm) M ± SD | Thickness (mm) M ± SD | Mass (g) M ± SD | Density ρ (g/mm3) M ± SD |
|---|---|---|---|---|---|
| Cushioning structure | -- | -- | 7.57 ± 0.23 | 0.35 ± 0.02 | 7.30 × 10−4 ± 2.11 × 10−5 |
| Fascial structure | 35.23 ± 0.21 | 4.99 ± 0.04 | 1.71 ± 0.03 | 0.23 ± 0.01 | 7.45 × 10−4 ± 1.57 × 10−5 |
| Skin structure | 30.45 ± 0.29 | 7.24 ± 0.14 | 1.87 ± 0.06 | 0.33 ± 0.02 | 8.07×10−4 ± 3.15×10−5 |
| Toe Pad | Hardness (Shore C) | Elastic Modulus E (MPa) |
|---|---|---|
| Cushioning structure | 31.8 ± 1.9 | 3.77 ± 2.33 |
| Fascial structure | 41.9 ± 1.9 | 6.38 ± 1.37 |
| Skin structure | 65.8 ± 2.3 | 8.30 ± 1.76 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, H.-B.; Zhang, R.; Yu, G.-L.; Wang, H.-T.; Wang, D.-C.; Tai, W.-H.; Huang, J.-L. A New Inspiration in Bionic Shock Absorption Midsole Design and Engineering. Appl. Sci. 2021, 11, 9679. https://doi.org/10.3390/app11209679
Yu H-B, Zhang R, Yu G-L, Wang H-T, Wang D-C, Tai W-H, Huang J-L. A New Inspiration in Bionic Shock Absorption Midsole Design and Engineering. Applied Sciences. 2021; 11(20):9679. https://doi.org/10.3390/app11209679
Chicago/Turabian StyleYu, Hai-Bin, Rui Zhang, Guo-Long Yu, Hai-Tao Wang, Dao-Chen Wang, Wei-Hsun Tai, and Jian-Long Huang. 2021. "A New Inspiration in Bionic Shock Absorption Midsole Design and Engineering" Applied Sciences 11, no. 20: 9679. https://doi.org/10.3390/app11209679
APA StyleYu, H. -B., Zhang, R., Yu, G. -L., Wang, H. -T., Wang, D. -C., Tai, W. -H., & Huang, J. -L. (2021). A New Inspiration in Bionic Shock Absorption Midsole Design and Engineering. Applied Sciences, 11(20), 9679. https://doi.org/10.3390/app11209679