
A Review on Methods and Systems for Remote Collaboration


Abstract
:1. Introduction
2. Methodology
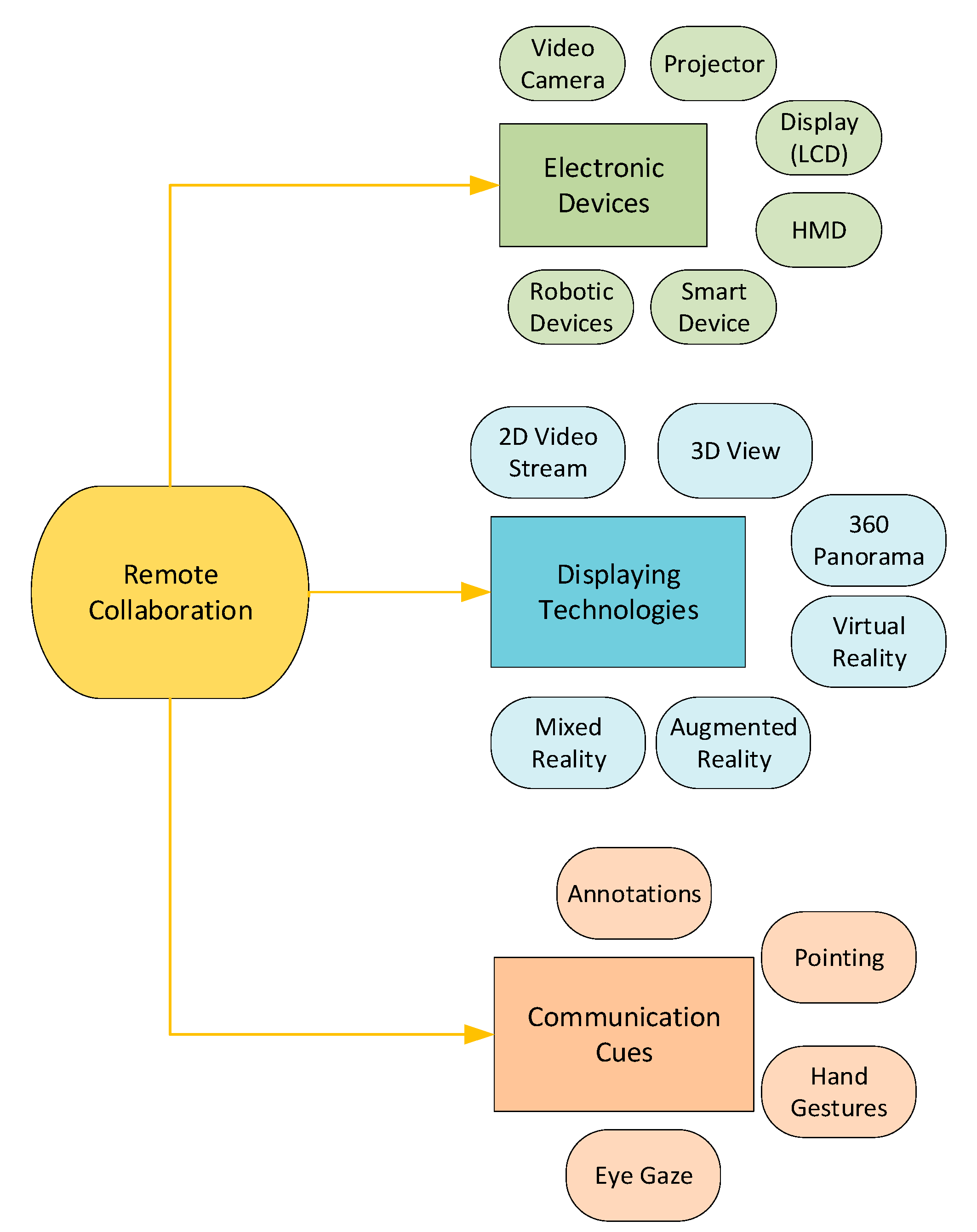
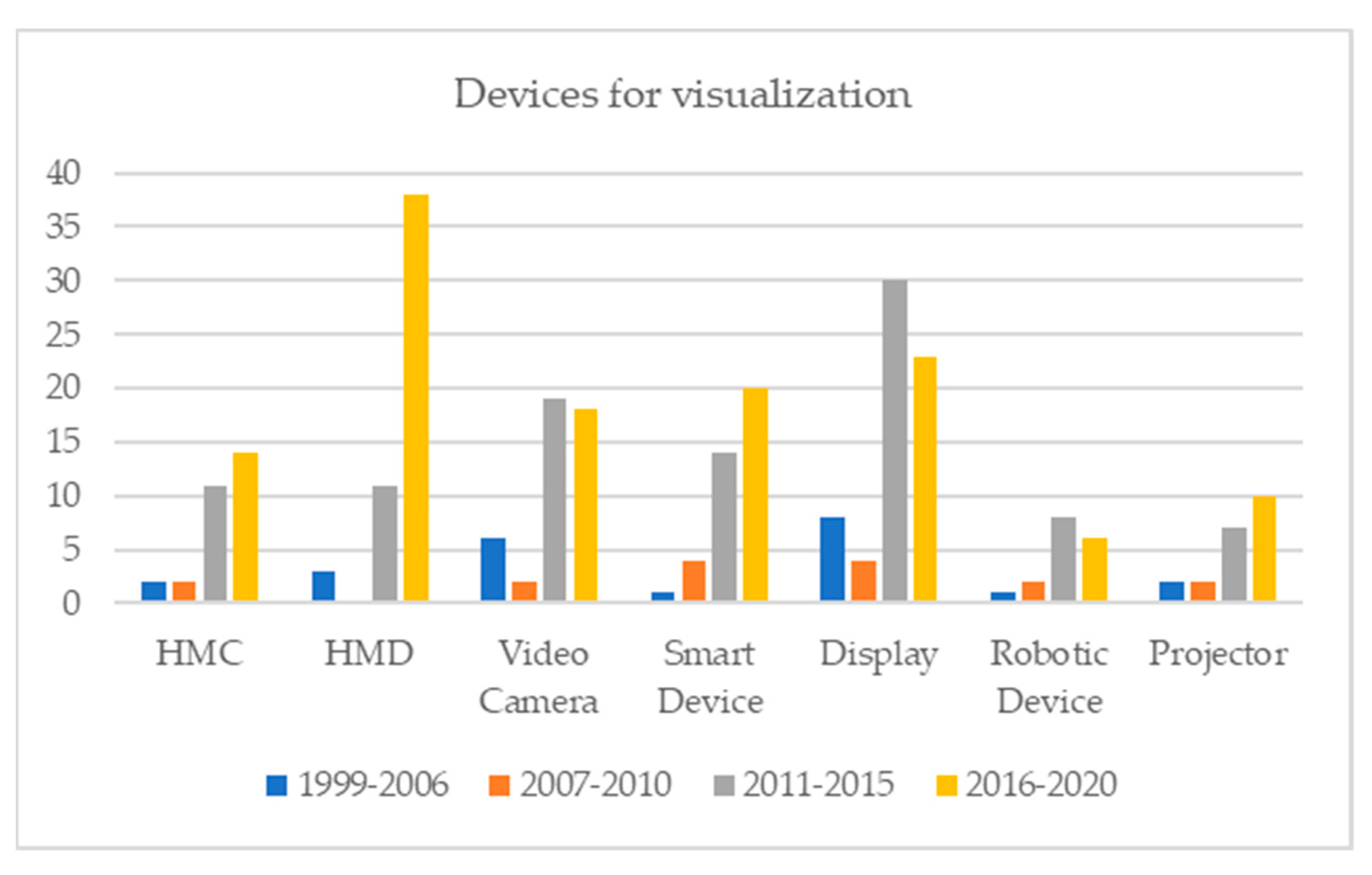
- “What kinds of devices are used in remote collaboration?”
- “What are the industrial domains making use of remote collaboration infrastructure?”
- “What are the technologies used in displaying the information?”
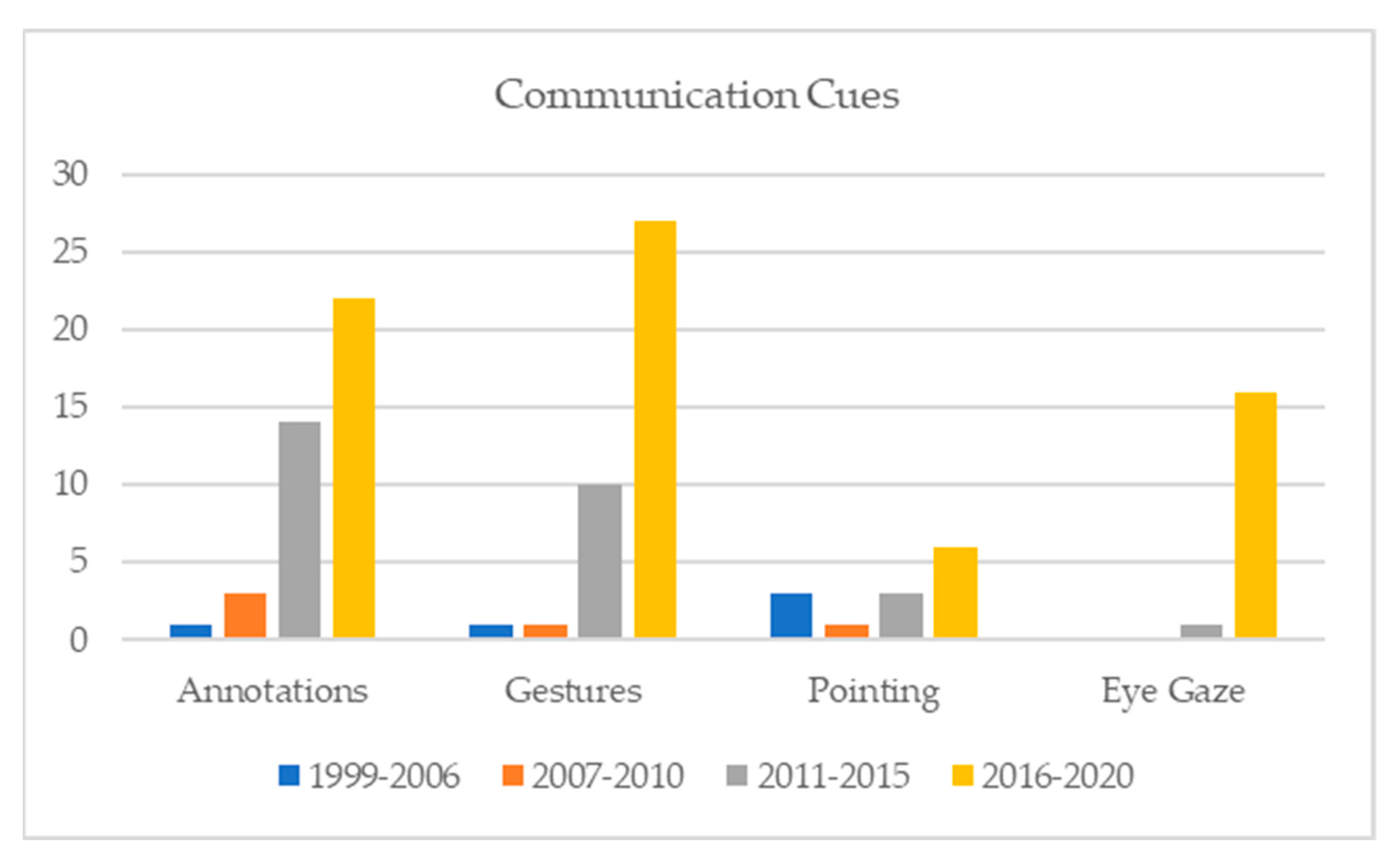
- “What are the types of communication cues used in remote collaboration?”
- “What can be improved to offer a better user experience?”
3. Electronic Devices Used in Remote Assistance
4. Visual Display Technologies
4.1. 2D View
4.2. 3D View
4.3. Virtual Reality (VR)
4.4. Augmented Reality (AR)
4.5. Mixed Reality (MR)
4.6. 360-Degree Panorama View
5. Communication Methods and Cues
5.1. Pointers and Annotations
5.2. Behavior Detection
5.3. Combining Visual Communication Cues
6. Discussions
7. Conclusions
- Using fixed cameras can reduce the field of view for the remote specialist and make it difficult to determine where the local user is looking.
- Head-mounted cameras (HMCs), besides being uncomfortable for the wearer, restrict the field of view for the helper, who can only see what the worker is seeing. On the other hand, HMCs allow the worker to use their hands to perform tasks.
- Handheld devices limit a local user’s ability to use both hands freely, but the research shows that they are a good option when working on static tasks.
- Head-mounted devices proved to be suitable for dynamic tasks but need stabilization techniques for captured video because the images are shaky, and viewers become dizzy.
- An independent view for the remote participant improves the viewer’s confidence significantly, and verbal communication is reduced used during the collaboration.
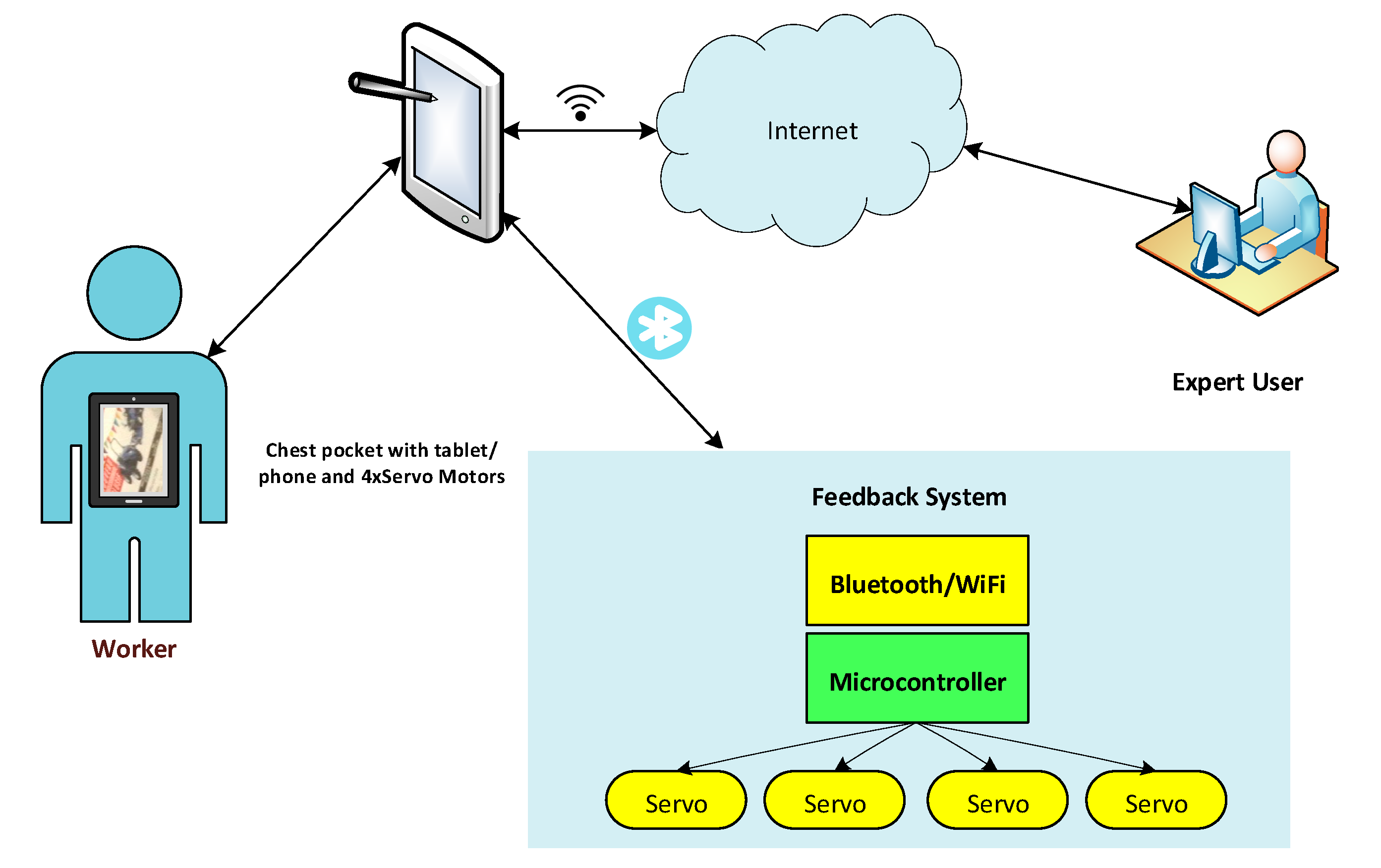
- Smartphone applications used in remote collaboration still have limited performance because of the heavy use of networks when streaming video.
- No published works were found on the extent to which more experts from different geographically distant locations can offer collaborative assistance for a machine/process, etc.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Villarruel, J.E.G.; Corona, B.T. Proposal for a Remote Surgery System Based on Wireless Communications, Electromyography and Robotics. In Proceedings of the 2008 Electronics, Robotics and Automotive Mechanics Conference (CERMA ’08), Cuernavaca, Mexico, 30 September–3 October 2008; pp. 93–98. [Google Scholar]
- Zemmar, A.; Lozano, A.M.; Nelson, B.J. The rise of robots in surgical environments during COVID-19. Nat. Mach. Intell. 2020, 2, 566–572. [Google Scholar] [CrossRef]
- Zineddine, M.; Arafa, N. Attitude towards Robot Assisted Surgery: UAE context. In Proceedings of the 2013 9th International Conference on Innovations in Information Technology (IIT), Al Ain, United Arab Emirates, 17–19 March 2013; pp. 175–179. [Google Scholar]
- Suthakorn, J. A concept on Cooperative Tele-Surgical System based on Image-Guiding and robotic technology. In Proceedings of the 2012 Pan American Health Care Exchanges, Miami, FL, USA, 26–31 March 2012; pp. 41–45. [Google Scholar] [CrossRef]
- Ma, X.; Guo, S.; Xiao, N.; Gao, B.; Guo, J.; Tamiya, T.; Kawanishi, M.; Kawanishi, M. Remote catheterization using a new robotic catheter manipulating system. In Proceedings of the 2013 ICME International Conference on Complex Medical Engineering, Beijing, China, 25–28 May 2013; pp. 394–398. [Google Scholar]
- Yanhong, F.; B in, W.; Fengjuan, H.; Wenqiang, T. Research on teleoperation surgery simulation system based on virtual reality. In Proceedings of the 11th World Congress on Intelligent Control and Automation, Shenyang, China, 29 June–4 July 2014; pp. 5830–5834. [Google Scholar]
- Cardenas, I.S.; Kim, J.-H. Advanced Technique for Tele-operated Surgery Using an Intelligent Head-mount Display System. In Proceedings of the 2013 29th Southern Biomedical Engineering Conference, Miami, FL, USA, 3–5 May 2013; pp. 143–144. [Google Scholar]
- Dardona, T.; Eslamian, S.; Reisner, L.A.; Pandya, A. Remote Presence: Development and Usability Evaluation of a Head-Mounted Display for Camera Control on the da Vinci Surgical System. Robotics 2019, 8, 31. [Google Scholar] [CrossRef] [Green Version]
- Colan, J.; Nakanishi, J.; Aoyama, T.; Hasegawa, Y. A Cooperative Human-Robot Interface for Constrained Manipulation in Robot-Assisted Endonasal Surgery. Appl. Sci. 2020, 10, 4809. [Google Scholar] [CrossRef]
- Widick, L.; Talkington, J.; Bajwa, G.; Dantu, R.; Logan, W. A framework for secured collaboration in mHealth. In Proceedings of the 2015 International Conference on Collaboration Technologies and Systems (CTS), Atlanta, GA, USA, 1–5 June 2015; pp. 364–369. [Google Scholar]
- Cidota, M.A.; Datcu, D. Remote Assistance System in Augmented Reality for Early School Dropout Prevention. In Proceedings of the 2020 IEEE International Symposium on Mixed and Augmented Reality Adjunct (ISMAR-Adjunct), Recife, Brazil, 1–9 November 2020; pp. 321–325. [Google Scholar]
- Gu, J.; Li, N.; Duh, H.B.-L. A remote mobile collaborative AR system for learning in physics. In Proceedings of the 2011 IEEE Virtual Reality Conference, Singapore, 19–23 March 2011; pp. 257–258. [Google Scholar]
- Bednarz, T.; James, C.; Caris, C.; Haustein, K.; Adcock, M.; Gunn, C. Applications of networked virtual reality for tele-operation and tele-assistance systems in the mining industry. In Proceedings of the 10th International Conference on Predictive Models in Software Engineering, Hong Kong, China, 11 December 2011; pp. 459–462. [Google Scholar]
- Back, M.; Childs, T.; Dunnigan, A.; Foote, J.; Gattepally, S.; Liew, B.; Shingu, J.; Vaughan, J. The virtual factory: Exploring 3D worlds as industrial collaboration and control environments. In Proceedings of the 2010 IEEE Virtual Reality Conference (VR), Boston, MA, USA, 20–24 March 2010; pp. 257–258. [Google Scholar]
- Back, M.; Kimber, D.; Rieffel, E.; Dunnigan, A.; Liew, B.; Gattepally, S.; Foote, J.; Shingu, J.; Vaughan, J. The virtual chocolate factory: Building a real world mixed-reality system for industrial collaboration and control. In Proceedings of the 2010 IEEE International Conference on Multimedia and Expo, Singapore, 19–23 July 2010; pp. 1160–1165. [Google Scholar]
- Kesavan, S. State-of-Art, Modular, Cloud Enabled Video Collaboration Solution for Next Generation Manufacturing Industries. In Proceedings of the 2019 Global Conference for Advancement in Technology (GCAT), Bangalore, India, 18–20 October 2019; pp. 1–6. [Google Scholar]
- Blog, W.E. Introducing Two New Mixed Reality Business Applications: Microsoft Remote Assist and Microsoft Layout. Windows Experience Blog, 7 May 2018. Available online: https://blogs.windows.com/windowsexperience/2018/05/07/introducing-two-new-mixed-reality-business-applications-microsoft-remote-assist-and-microsoft-layout/ (accessed on 28 April 2021).
- HoloLens 2—Overview, Features, and Specs|Microsoft HoloLens. Available online: https://www.microsoft.com/ro-ro/hololens/hardware (accessed on 2 July 2021).
- Dynamics 365 Remote Assist Mobile Overview—Dynamics 365 Mixed Reality. Available online: https://docs.microsoft.com/en-us/dynamics365/mixed-reality/remote-assist/mobile-app/remote-assist-mobile-overview (accessed on 28 April 2021).
- Campero-Jurado, I.; Márquez-Sánchez, S.; Quintanar-Gómez, J.; Rodríguez, S.; Corchado, J. Smart Helmet 5.0 for Industrial Internet of Things Using Artificial Intelligence. Sensors 2020, 20, 6241. [Google Scholar] [CrossRef] [PubMed]
- Hitachi and Microsoft form a Strategic Alliance to Advance Next-Generation Digital Solutions for Manufacturing and Logis-tics Across Southeast Asia, North America and Japan. Available online: https://www.hitachi.com/New/cnews/month/2020/06/200626.pdf (accessed on 28 April 2021).
- Poelman, R.; Akman, O.; Lukosch, S.; Jonker, P. As if Being There: Mediated Reality for Crime Scene Investigation. In Proceedings of the CSCW ’12: 2012 ACM Conference on Computer Supported Cooperative Work, New York, NY, USA, 11 February 2012; pp. 1267–1276. [Google Scholar]
- IEEE Xplore. Available online: https://ieeexplore.ieee.org/ (accessed on 12 September 2021).
- Yang, K.; Setubal, J.C. A Whole Genome Simulator of Prokaryote Genome Evolution. In Proceedings of the Second ACM Conference on Bioinformatics, Computational Biology and Biomedicine, Chicago, IL, USA, 31 July–3 August 2011; Grossman, R., Rzhetsky, A., Eds.; ACM: New York, NY, USA; pp. 508–510. Available online: http://dl.acm.org (accessed on 10 July 2012).
- Google Trends. Available online: https://trends.google.com/trends/explore?date=2004-01-01%202021-08-01&q=remote%20collaboration,remote%20team%20collaboration,remote%20intervention (accessed on 12 September 2021).
- Bauer, M.; Kortuem, G.; Segall, Z. “Where are you pointing at?” A study of remote collaboration in a wearable videoconference system. In Proceedings of the Digest of Papers, Third International Symposium on Wearable Computers, San Francisco, CA, USA, 18–19 October 1999; pp. 151–158. [Google Scholar]
- Fussell, S.R.; Setlock, L.D.; Kraut, R.E. Effects of head-mounted and scene-oriented video systems on remote collaboration on physical tasks. In Proceedings of the Conference on Human Factors in Computing Systems—CHI ’03, Fort Lauderdale, FL, USA, 5 April 2003; pp. 513–520. [Google Scholar]
- Kurata, T.; Sakata, N.; Kourogi, M.; Kuzuoka, H.; Billinghurst, M. Remote Collaboration using a Shoulder-Worn Active Camera/Laser. Eighth Int. Symp. Wearable Comput. 2004, 1, 62–69. [Google Scholar] [CrossRef] [Green Version]
- Machino, T.; Nanjo, Y.; Yanagihara, Y.; Kawata, H.; Iwaki, S.; Shimokura, K. Robot-augmented communication: A remote-collaboration system based on a shared field of view in real space. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 2203–2209. [Google Scholar]
- Machino, T.; Iwaki, S.; Kawata, H.; Yanagihara, Y.; Nanjo, Y.; Shimokura, K.-I. Remote-collaboration system using mobile robot with camera and projector. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, 2006. ICRA 2006, Orlando, FL, USA, 15–19 May 2006; pp. 4063–4068. [Google Scholar]
- Adcock, M.; Gunn, C. Annotating with ‘sticky’ light for remote guidance. In ACM SIGGRAPH ASIA 2010 Posters on—SA ’10; Association for Computing Machinery: Seoul, Korea, 15 December 2010; p. 1. [Google Scholar]
- Gauglitz, S.; Lee, C.; Turk, M.; Höllerer, T. Integrating the physical environment into mobile remote collaboration. In Proceedings of the 14th International Conference on Human-Computer Interaction with Mobile Devices and Services—MobileHCI ’12, San Francisco, CA, USA, 21 September 2012; pp. 241–250. [Google Scholar]
- Gauglitz, S.; Nuernberger, B.; Turk, M.; Höllerer, T. World-stabilized annotations and virtual scene navigation for remote collaboration. In Proceedings of the 27th annual ACM Symposium on User Interface Software and Technology, Honolulu, HI, USA, 5 October 2014; pp. 449–459. [Google Scholar]
- Gurevich, P.; Lanir, J.; Cohen, B.; Stone, R. TeleAdvisor: A versatile augmented reality tool for remote assistance. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Austin, TX, USA, 5 May 2012; pp. 619–622. [Google Scholar]
- Huang, W.; Alem, L. HandsinAir: A Wearable System for Remote Collaboration on Physical Tasks. In Proceedings of the 2013 Conference on Computer Supported Cooperative Work Companion–CSCW ’13, Association for Computing Machinery, New York, NY, USA, 23 February 2013; pp. 153–156. [Google Scholar]
- Robert, K.; Zhu, D.; Huang, W.; Alem, L.; Gedeon, T. MobileHelper: Remote Guiding Using Smart Mobile Devices, Hand Gestures and Augmented Reality. In Proceedings of the SIGGRAPH Asia 2013 Symposium on Mobile Graphics and Interactive Applications on—SA ’13, Association for Computing Machinery, New York, NY, USA, 19 November 2013; Volume 39, p. 39. [Google Scholar]
- Tait, M.; Tsai, T.; Sakata, N.; Billinghurst, M.; Vartiainen, E. A projected augmented reality system for remote collaboration. In Proceedings of the 2013 IEEE International Symposium on Mixed and Augmented Reality (ISMAR), Adelaide, Australia, 1–4 October 2013; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Domova, V.; Vartiainen, E.; Englund, M. Designing a Remote Video Collaboration System for Industrial Settings. In Proceedings of the Ninth ACM International Conference on Interactive Tabletops and Surfaces–ITS ’14, Association for Computing Machinery, New York, NY, USA, 16 November 2014; pp. 229–238. [Google Scholar]
- Onishi, Y.; Tanaka, K.; Nakanishi, H. PopArm: A robot arm for embodying video-mediated pointing behaviors. In Proceedings of the 2014 International Conference on Collaboration Technologies and Systems (CTS), Minneapolis, MN, USA, 19–23 May 2014; pp. 137–141. [Google Scholar]
- Benavides, X.; Amores, J.; Maes, P. Remot-IO: A System for Reaching into the Environment of a Remote Collaborator. In Proceedings of the 28th Annual ACM Symposium on User Interface Software & Technology, Association for Computing Machinery, New York, NY, USA, 6 November 2015; pp. 99–100. [Google Scholar] [CrossRef] [Green Version]
- Vartiainen, E.; Domova, V.; Englund, M. Expert on Wheels: An Approach to Remote Collaboration. In Proceedings of the 3rd International Conference on Human-Agent Interaction, Association for Computing Machinery, New York, NY, USA, 21 October 2015; pp. 49–54. [Google Scholar]
- Johnson, S.; Gibson, M.; Mutlu, B. Handheld or Handsfree? Remote Collaboration via Lightweight Head-Mounted Displays and Handheld Devices. In Proceedings of the 18th ACM Conference on Computer Supported Cooperative Work & Social Computing, Vancouver, BC, Canada, 28 February 2015; pp. 1825–1836. [Google Scholar]
- Johnson, S.; Rae, I.; Mutlu, B.; Takayama, L. Can You See Me Now? How Field of View Affects Collaboration in Robotic Telepresence. In Proceedings of the 33rd Annual ACM Conference on Human Factors in Computing Systems, Seoul, Korea, 18 April 2015; pp. 2397–2406. [Google Scholar]
- Kasahara, S.; Nagai, S.; Rekimoto, J. JackIn Head: Immersive Visual Telepresence System with Omnidirectional Wearable Camera. IEEE Trans. Vis. Comput. Graph. 2016, 23, 1222–1234. [Google Scholar] [CrossRef] [PubMed]
- Tait, M.; Billinghurst, M. The Effect of View Independence in a Collaborative AR System. Comput. Support. Cooper. Work 2015, 24, 563–589. [Google Scholar] [CrossRef]
- Ahn, J.-G.; Kim, G.J. Remote collaboration using a tele-presence mobile projector robot tele-operated by a smartphone. In Proceedings of the 2016 IEEE/SICE International Symposium on System Integration (SII), Sapporo, Japan, 13–15 December 2016; pp. 236–241. [Google Scholar] [CrossRef]
- Essig, K.; Strenge, B.; Schack, T. ADAMAAS: Towards Smart Glasses for Mobile and Personalized Action Assistance. In Proceedings of the 9th ACM International Conference on Distributed Event-Based Systems, Association for Computing Machinery, New York, NY, USA, 29 June 2016; p. 46. [Google Scholar]
- Kratz, S.; Ferriera, F.R. Immersed remotely: Evaluating the use of Head Mounted Devices for remote collaboration in robotic telepresence. In Proceedings of the 2016 25th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), New York, NY, USA, 26–31 August 2016; pp. 638–645. [Google Scholar]
- Lee, Y.; Masai, K.; Kunze, K.; Sugimoto, M.; Billinghurst, M. A Remote Collaboration System with Empathy Glasses. In Proceedings of the 2016 IEEE International Symposium on Mixed and Augmented Reality (ISMAR-Adjunct), Merida, Mexico, 19–23 September 2016; pp. 342–343. [Google Scholar]
- Masai, K.; Kunze, K.; Sugimoto, M.; Billinghurst, M. Empathy Glasses. In Proceedings of the 2016 CHI Conference Extended Abstracts on Human Factors in Computing Systems, San Jose, CA, USA, 7 May 2016; pp. 1257–1263. [Google Scholar]
- Komiyama, R.; Miyaki, T.; Rekimoto, J. JackIn space: Designing a seamless transition between first and third person view for effective telepresence collaborations. In Proceedings of the 8th Augmented Human International Conference, Silicon Valley, CA, USA, 16 March 2017; p. 14. [Google Scholar]
- Le, K.-D.; Zhu, K.; Fjeld, M. Mirrortablet: Exploring a low-cost mobile system for capturing unmediated hand gestures in remote collaboration. In Proceedings of the 16th International Conference on Mobile and Ubiquitous Multimedia, Association for Computing Machinery, New York, NY, USA, 26 November 2017; pp. 79–89. [Google Scholar]
- Tobita, H. Gutsy-Avatar: Computational Assimilation for Advanced Communication and Collaboration. In Proceedings of the 2017 First IEEE International Conference on Robotic Computing (IRC), Taichung, Taiwan, 10–12 April 2017; pp. 8–13. [Google Scholar]
- Feick, M.; Mok, T.; Tang, A.; Oehlberg, L.; Sharlin, E. Perspective on and Re-orientation of Physical Proxies in Object-Focused Remote Collaboration. In Proceedings of the 2018 CHI Conference on Human Factors in Computing Systems, Montreal, QC, Canada, 21 April 2018; Association for Computing Machinery: New York, NY, USA, 2018; pp. 1–13. [Google Scholar]
- Lee, G.A.; Teo, T.; Kim, S.; Billinghurst, M. A User Study on MR Remote Collaboration Using Live 360 Video. In Proceedings of the 2018 IEEE International Symposium on Mixed and Augmented Reality (ISMAR), Munich, Germany, 16–20 October 2018; pp. 153–164. [Google Scholar]
- Unver, B.; D’Angelo, S.; Miller, M.; Tang, J.C.; Venolia, G.; Inkpen, K. Hands-Free Remote Collaboration Over Video: Exploring Viewer and Streamer Reactions. In Proceedings of the 2018 ACM International Conference on Interactive Surfaces and Spaces, Tokyo, Japan, 19 November 2018; pp. 85–95. [Google Scholar]
- Kwon, J.U.; Hwang, J.-I.; Park, J.; Ahn, S.C. Fully Asymmetric Remote Collaboration System. IEEE Access 2019, 7, 54155–54166. [Google Scholar] [CrossRef]
- Teo, T.; Lee, G.; Billinghurst, M.; Adcock, M. Merging Live and Static 360 Panoramas Inside a 3D Scene for Mixed Reality Remote Collaboration. In Proceedings of the 2019 IEEE International Symposium on Mixed and Augmented Reality Adjunct (ISMAR-Adjunct), Beijing, China, 10–18 October 2019; pp. 22–25. [Google Scholar]
- Li, Z.; Teo, T.; Chan, L.; Lee, G.; Adcock, M.; Billinghurst, M.; Koike, H. OmniGlobeVR. In Proceedings of the 2020 ACM Designing Interactive Systems Conference, Association for Computing Machinery, New York, NY, USA, 3 July 2020; pp. 615–625. [Google Scholar]
- Mohr, P.; Mori, S.; Langlotz, T.; Thomas, B.H.; Schmalstieg, D.; Kalkofen, D. Mixed Reality Light Fields for Interactive Remote Assistance. In Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems, Association for Computing Machinery, New York, NY, USA, 21 April 2020; pp. 1–12. [Google Scholar]
- Welch, G.; Sonnenwald, D.H.; Mayer-Patel, K.; Yang, R.; State, A.; Towles, H.; Cairns, B.; Fuchs, H. Remote 3D Medical Consultation. In Virtual Realities: Dagstuhl Seminar 2008; Brunnett, G., Coquillart, S., Welch, G., Eds.; Springer: Vienna, Austria, 2011; pp. 139–159. [Google Scholar]
- Kainz, B.; Schmalstieg, D.; Hauswiesner, S.; Reitmayr, G.; Steinberger, M.; Grasset, R.; Gruber, L.; Veas, E.; Kalkofen, D.; Seichter, H. OmniKinect. In Proceedings of the 18th ACM symposium on Virtual reality software and technology—VRST ’12, Association for Computing Machinery, New York, NY, USA, 10 December 2012; pp. 25–32. [Google Scholar]
- Tecchia, F.; Alem, L.; Huang, W. 3D helping hands: A gesture based MR system for remote collaboration. In Proceedings of the 11th ACM SIGGRAPH International Conference on Virtual-Reality Continuum and its Applications in Industry—VRCAI ’12, Association for Computing Machinery, New York, NY, USA, 2 December 2012; pp. 323–328. [Google Scholar]
- Adcock, M.; Anderson, S.; Thomas, B. RemoteFusion: Real time depth camera fusion for remote collaboration on physical tasks. In Proceedings of the 12th ACM SIGGRAPH International Conference on Virtual-Reality Continuum and Its Applications in Industry—VRCAI ’13, Hong Kong, China, 17 November 2013; pp. 235–242. [Google Scholar]
- Gauglitz, S.; Nuernberger, B.; Turk, M.; Höllerer, T. In touch with the remote world: Remote collaboration with augmented reality drawings and virtual navigation. In Proceedings of the 20th ACM Symposium on Virtual Reality Software and Technology—VRST ’14, Edinburgh, Scotland, 11 November 2014; pp. 197–205. [Google Scholar]
- Gao, L.; Bai, H.; He, W.; Billinghurst, M.; Lindeman, R.W. Real-time visual representations for mobile mixed reality remote collaboration. In Proceedings of the SIGGRAPH Asia 2018 Virtual & Augmented Reality on—SA ’18, Tokyo, Japan, 4 December 2018; pp. 1–2. [Google Scholar]
- Oculus Rift. Available online: https://en.wikipedia.org/wiki/Oculus_Rift (accessed on 24 September 2021).
- HTC Vive. Available online: https://en.wikipedia.org/wiki/HTC_Vive (accessed on 24 September 2021).
- Oculus Quest. Available online: https://en.wikipedia.org/wiki/Oculus_Quest (accessed on 24 September 2021).
- “Virtual Reality,” Wikipedia. Available online: https://en.wikipedia.org/wiki/Virtual_reality (accessed on 24 September 2021).
- Piumsomboon, T.; Day, A.; Ens, B.; Lee, Y.; Lee, G.; Billinghurst, M. Exploring enhancements for remote mixed reality collaboration. In Proceedings of the SIGGRAPH Asia 2017 Mobile Graphics & Interactive Applications on—SA ’17, Bangkok, Thailand, 27 November 2017; p. 16. [Google Scholar]
- Gao, L.; Bai, H.; Lee, G.; Billinghurst, M. An oriented point-cloud view for MR remote collaboration. In Proceedings of the SIGGRAPH ASIA 2016 Mobile Graphics and Interactive Applications, Macau, China, 28 November 2016; pp. 1–4. [Google Scholar]
- Gao, L.; Bai, H.; Lindeman, R.; Billinghurst, M. Static local environment capturing and sharing for MR remote collaboration. In Proceedings of the SIGGRAPH Asia 2017 Mobile Graphics & Interactive Applications on—SA ’17, Bangkok, Thailand, 27 November 2017; p. 17. [Google Scholar]
- Elvezio, C.; Sukan, M.; Oda, O.; Feiner, S.; Tversky, B. Remote collaboration in AR and VR using virtual replicas. In Proceedings of the ACM SIGGRAPH 2017 VR Village, Los Angeles, CA, USA, 30 July 2017; p. 13. [Google Scholar]
- Van Krevelen, R. Augmented Reality: Technologies, Applications, and Limitations. Int. J. Virtual Real. 2007, 9, 1–20. [Google Scholar] [CrossRef]
- Bottecchia, S.; Cieutat, J.-M.; Jessel, J.-P. TAC: Augmented reality system for collaborative tele-assistance in the field of maintenance through internet. In Proceedings of the 1st Augmented Human International Conference, Megève, France, 2 April 2010; pp. 1–7. [Google Scholar]
- Schneider, M.; Rambach, J.; Stricker, D. Augmented reality based on edge computing using the example of remote live support. In Proceedings of the 2017 IEEE International Conference on Industrial Technology (ICIT), Toronto, ON, Canada, 22–25 March 2017; pp. 1277–1282. [Google Scholar]
- Zillner, J.; Mendez, E.; Wagner, D. Augmented Reality Remote Collaboration with Dense Reconstruction. In Proceedings of the 2018 IEEE International Symposium on Mixed and Augmented Reality Adjunct (ISMAR-Adjunct), Munich, Germany, 16–20 October 2018; pp. 38–39. [Google Scholar]
- Rasmussen, T.A.; Huang, W. SceneCam: Using AR to improve Multi-Camera Remote Collaboration. In Proceedings of the SIGGRAPH Asia 2019 XR, Brisbane, QLD, Australia, 17 November 2019; pp. 36–37. [Google Scholar]
- Rasmussen, T.A.; Huang, W. SceneCam: Improving Multi-camera Remote Collaboration using Augmented Reality. In Proceedings of the 2019 IEEE International Symposium on Mixed and Augmented Reality Adjunct (ISMAR-Adjunct), Beijing, China, 10–18 October 2019; pp. 28–33. [Google Scholar]
- Yang, P.; Kitahara, I.; Ohta, Y. Remote Mixed Reality System Supporting Interactions with Virtualized Objects. In Proceedings of the 2015 IEEE International Symposium on Mixed and Augmented Reality, Fukuoka, Japan, 29 September–3 October 2015; pp. 64–67. [Google Scholar]
- Müller, J.; Rädle, R.; Reiterer, H. Remote Collaboration with Mixed Reality Displays: How Shared Virtual Landmarks Facilitate Spatial Referencing. In Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems, Denver, CO, USA, 2 May 2017; pp. 6481–6486. [Google Scholar]
- Feick, M.; Tang, A.; Bateman, S. Mixed-Reality for Object-Focused Remote Collaboration. In Proceedings of the 31st Annual ACM Symposium on User Interface Software and Technology Adjunct Proceedings, Berlin, Germany, 11 October 2018; pp. 63–65. [Google Scholar]
- Teo, T.; Lee, G.; Billinghurst, M.; Adcock, M. 360Drops: Mixed Reality Remote Collaboration using 360 Panoramas within the 3D Scene. In Proceedings of the SIGGRAPH Asia 2019 Emerging Technologies, Brisbane, QLD, Australia, 17 November 2019; Association for Computing Machinery: New York, NY, USA, 2019; pp. 1–2. [Google Scholar]
- Teo, T.; Hayati, A.F.; Lee, G.A.; Billinghurst, M.; Adcock, M. A Technique for Mixed Reality Remote Collaboration using 360 Panoramas in 3D Reconstructed Scenes. In Proceedings of the 25th ACM Symposium on Virtual Reality Software and Technology, Association for Computing Machinery, New York, NY, USA, 12 November 2019; p. 23. [Google Scholar]
- Teo, T.; Lawrence, L.; Lee, G.A.; Billinghurst, M.; Adcock, M. Mixed Reality Remote Collaboration Combining 360 Video and 3D Reconstruction. In Proceedings of the 2019 CHI Conference on Human Factors in Computing Systems, Glasgow, Scotland, UK, 2 May 2019; pp. 1–14. [Google Scholar]
- Gao, L.; Bai, H.; Billinghurst, M.; Lindeman, R.W. User Behaviour Analysis of Mixed Reality Remote Collaboration with a Hybrid View Interface. In Proceedings of the 32nd Australian Conference on Human-Computer Interaction, Association for Computing Machinery, New York, NY, USA, 2 December 2020; pp. 629–638. [Google Scholar]
- Kasahara, S.; Nagai, S.; Rekimoto, J. LiveSphere: Immersive experience sharing with 360 degrees head-mounted cameras. In Proceedings of the adjunct publication of the 27th annual ACM symposium on User interface software and technology—UIST’14 Adjunct, Honolulu, HI, USA, 5 October 2014; pp. 61–62. [Google Scholar]
- Kasahara, S.; Rekimoto, J. JackIn head: Immersive visual telepresence system with omnidirectional wearable camera for remote collaboration. In Proceedings of the 21st ACM Symposium on Virtual Reality Software and Technology, Beijing, China, 13 November 2015; pp. 217–225. [Google Scholar]
- Lee, G.A.; Teo, T.; Kim, S.; Billinghurst, M. Mixed reality collaboration through sharing a live panorama. In Proceedings of the SIGGRAPH Asia 2017 Mobile Graphics & Interactive Applications on—SA ’17, Bangkok, Thailand, 27 November 2017; p. 14. [Google Scholar]
- Lee, G.A.; Teo, T.; Kim, S.; Billinghurst, M. Sharedsphere: MR collaboration through shared live panorama. In Proceedings of the SIGGRAPH Asia 2017 Emerging Technologies, Bangkok, Thailand, 27 November 2017; p. 12. [Google Scholar]
- Kangas, J.; Sand, A.; Jokela, T.; Piippo, P.; Eskolin, P.; Salmimaa, M.; Raisamo, R. Remote Expert for Assistance in a Physical Operational Task. In Proceedings of the Extended Abstracts of the 2018 CHI Conference on Human Factors in Computing Systems, Association for Computing Machinery, New York, NY, USA, 20 April 2018; p. LBW127. [Google Scholar]
- Speicher, M.; Cao, J.; Yu, A.; Zhang, H.; Nebeling, M. 360Anywhere: Mobile Ad-hoc Collaboration in Any Environment using 360 Video and Augmented Reality. Proc. ACM Hum.-Comput. Interact. 2018, 2, 1–20. [Google Scholar] [CrossRef]
- Piumsomboon, T.; Lee, G.A.; Irlitti, A.; Ens, B.; Thomas, B.H.; Billinghurst, M. On the Shoulder of the Giant: A Multi-Scale Mixed Reality Collaboration with 360 Video Sharing and Tangible Interaction. In Proceedings of the 2019 CHI Conference on Human Factors in Computing Systems, Glasgow, Scotland, UK, 2 May 2019; p. 228. [Google Scholar]
- Fussell, S.R.; Kraut, R.E.; Siegel, J. Coordination of communication: Effects of shared visual context on collaborative work. In Proceedings of the 2000 ACM Conference on Computer Supported Cooperative Work, Philadelphia, PA, USA, 1 December 2000; pp. 21–30. [Google Scholar] [CrossRef]
- Fussell, S.R.; Setlock, L.D.; Yang, J.; Ou, J.; Mauer, E.; Kramer, A.D.I. Gestures Over Video Streams to Support Remote Collaboration on Physical Tasks. Hum.-Comput. Interact. 2004, 19, 273–309. [Google Scholar] [CrossRef]
- Kirk, D.; Rodden, T.; Fraser, D.S. Turn it this way: Grounding collaborative action with remote gestures. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, San Jose, CA, USA, 29 April 2007; pp. 1039–1048. [Google Scholar]
- Kirk, D.; Fraser, D.S. Comparing remote gesture technologies for supporting collaborative physical tasks. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Montréal, QC, Canada, 22 April 2006; pp. 1191–1200. [Google Scholar]
- Fussell, S.R.; Setlock, L.D.; Parker, E.M.; Yang, J. Assessing the value of a cursor pointing device for remote collaboration on physical tasks. In Proceedings of the CHI ’03 Extended Abstracts on Human Factors in Computing Systems—CHI ’03, New York, NY, USA, 5 April 2003; pp. 788–789. [Google Scholar]
- Sakata, N.; Okamoto, S.; Nishida, S. Applications of Visible Light Path Laser Projector. In Presented at the Symposium on Human Interface; Springer: Berlin/Heidelberg, Germany, 2009; pp. 611–618. [Google Scholar] [CrossRef]
- Palmer, D.; Adcock, M.; Smith, J.; Hutchins, M.; Gunn, C.; Stevenson, D.; Taylor, K. Annotating with light for remote guidance. In Proceedings of the 2007 Conference of the Computer-Human Interaction Special Interest Group (CHISIG) of Australia on Computer-Human Interaction: Design: Activities, Artifacts and Environments—OZCHI ’07, Adelaide, Australia, 28 November 2007; pp. 103–110. [Google Scholar]
- Kim, S.; Lee, G.A.; Sakata, N.; Dunser, A.; Vartiainen, E.; Billinghurst, M. Study of augmented gesture communication cues and view sharing in remote collaboration. In Proceedings of the 2013 IEEE International Symposium on Mixed and Augmented Reality (ISMAR), Adelaide, SA, Australia, 1–4 October 2013; pp. 261–262. [Google Scholar]
- Jo, H.; Hwang, S. Chili: Viewpoint control and on-video drawing for mobile video calls. In Proceedings of the CHI ’13 Extended Abstracts on Human Factors in Computing Systems on—CHI EA ’13, Paris, France, 27 April 2013; pp. 1425–1430. [Google Scholar]
- Kim, S.; Lee, G.; Sakata, N.; Billinghurst, M. Improving co-presence with augmented visual communication cues for sharing experience through video conference. In Proceedings of the 2014 IEEE International Symposium on Mixed and Augmented Reality (ISMAR), Munich, Germany, 10–12 September 2014; pp. 83–92. [Google Scholar]
- Adcock, M.; Gunn, C. Using Projected Light for Mobile Remote Guidance. Comput. Support. Cooperative Work. 2015, 24, 591–611. [Google Scholar] [CrossRef]
- Fakourfar, O.; Ta, K.; Tang, R.; Bateman, S.; Tang, A. Stabilized Annotations for Mobile Remote Assistance. In Proceedings of the 2016 CHI Conference on Human Factors in Computing Systems, San Jose, CA, USA, 7 May 2016; pp. 1548–1560. [Google Scholar]
- Nuernberger, B.; Lien, K.-C.; Grinta, L.; Sweeney, C.; Turk, M.; Höllerer, T. Multi-view gesture annotations in image-based 3D reconstructed scenes. In Proceedings of the 22nd ACM Conference on Virtual Reality Software and Technology, Munich, Germany, 2 November 2016; pp. 129–138. [Google Scholar]
- Rice, M.; Chia, S.C.; Tay, H.H.; Wan, M.; Li, L.; Ng, J.; Lim, J.H. Exploring the Use of Visual Annotations in a Remote Assistance Platform. In Proceedings of the 2016 CHI Conference Extended Abstracts on Human Factors in Computing Systems, San Jose, CA, USA, 7 May 2016; pp. 1295–1300. [Google Scholar]
- Chang, Y.-C.; Wang, H.-C.; Chu, H.-K.; Lin, S.-Y.; Wang, S.-P. AlphaRead: Support Unambiguous Referencing in Remote Collaboration with Readable Object Annotation. In Proceedings of the 2017 ACM Conference on Computer Supported Cooperative Work and Social Computing, Portland, OR, USA, 25 February 2017; pp. 2246–2259. [Google Scholar]
- Tan, K.H.; Robinson, I.N.; Culbertson, B.; Apostolopoulos, J. Enabling genuine eye contact and accurate gaze in remote collaboration. In Proceedings of the 2010 IEEE International Conference on Multimedia and Expo, Singapore, 19–23 July 2010; pp. 430–435. [Google Scholar]
- Gelb, D.; Subramanian, A.; Tan, K.H. Augmented reality for immersive remote collaboration. In Proceedings of the 2011 IEEE Workshop on Person-Oriented Vision 2011, Kona, HI, USA, 7 January 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Huang, W.; Alem, L. Supporting Hand Gestures in Mobile Remote Collaboration: A Usability Evaluation. In Proceedings of the 25th BCS Conference on Human-Computer Interaction, Swindon, UK, 4 July 2011; pp. 211–216. [Google Scholar]
- Sodhi, R.S.; Jones, B.R.; Forsyth, D.; Bailey, B.P.; Maciocci, G. BeThere: 3D mobile collaboration with spatial input. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Paris, France, 27 April 2013; pp. 179–188. [Google Scholar]
- Zenati-Henda, N.; Bellarbi, A.; Benbelkacem, S.; Belhocine, M. Augmented reality system based on hand gestures for remote maintenance. In Proceedings of the 2014 International Conference on Multimedia Computing and Systems (ICMCS), Marrakech, Morocco, 14–16 April 2014; pp. 5–8. [Google Scholar]
- Gupta, K.; Lee, G.; Billinghurst, M. Do You See What I See? The Effect of Gaze Tracking on Task Space Remote Collaboration. IEEE Trans. Vis. Comput. Graph. 2016, 22, 2413–2422. [Google Scholar] [CrossRef] [PubMed]
- Higuch, K.; Yonetani, R.; Sato, Y. Can Eye Help You? Effects of Visualizing Eye Fixations on Remote Collaboration Scenarios for Physical Tasks. In Proceedings of the 2016 CHI Conference on Human Factors in Computing Systems, San Jose, CA, USA, 7 May 2016; pp. 5180–5190. [Google Scholar]
- Li, J.; Manavalan, M.E.; D’Angelo, S.; Gergle, D. Designing Shared Gaze Awareness for Remote Collaboration. In Proceedings of the 19th ACM Conference on Computer Supported Cooperative Work and Social Computing Companion—CSCW ’16 Companion, San Francisco, CA, USA, 27 February 2016; pp. 325–328. [Google Scholar]
- Lee, G.; Kim, S.; Lee, Y.; Dey, A.; Piumsomboon, T.; Norman, M.; Billinghurst, M. Mutually Shared Gaze in Augmented Video Conference. In Proceedings of the 2017 IEEE International Symposium on Mixed and Augmented Reality (ISMAR-Adjunct), Nantes, France, 9–13 October 2017; pp. 79–80. [Google Scholar]
- Huang, W.; Billinghurst, M.; Alem, L.; Kim, S. HandsInTouch: Sharing gestures in remote collaboration. In Proceedings of the 30th Australian Conference on Computer-Human Interaction, Melbourne, Australia, 4 December 2018; pp. 396–400. [Google Scholar]
- Otsuki, M.; Maruyama, K.; Kuzuoka, H.; Suzuki, Y. Effects of Enhanced Gaze Presentation on Gaze Leading in Remote Collaborative Physical Tasks. In Proceedings of the 2018 CHI Conference on Human Factors in Computing Systems, New York, NY, USA, 21 April 2018; p. 368. [Google Scholar]
- Shiro, K.; Okada, A.; Miyaki, T.; Rekimoto, J. OmniGaze: A Display-covered Omnidirectional Camerafor Conveying Remote User’s Presence. In Proceedings of the 6th International Conference on Human-Agent Interaction, Southampton, UK, 4 December 2018; pp. 176–183. [Google Scholar]
- Sasikumar, P.; Gao, L.; Bai, H.; Billinghurst, M. Wearable RemoteFusion: A Mixed Reality Remote Collaboration System with Local Eye Gaze and Remote Hand Gesture Sharing. In Proceedings of the 2019 IEEE International Symposium on Mixed and Augmented Reality Adjunct (ISMAR-Adjunct), Beijing, China, 10–18 October 2019; pp. 393–394. [Google Scholar]
- Wang, P.; Zhang, S.; Bai, X.; Billinghurst, M.; He, W.; Wang, S.; Zhang, X.; Du, J.; Chen, Y. Head Pointer or Eye Gaze: Which Helps More in MR Remote Collaboration? In Proceedings of the 2019 IEEE Conference on Virtual Reality and 3D User Interfaces (VR), Osaka, Japan, 23–27 March 2019; pp. 1219–1220. [Google Scholar]
- Zakharkin, I.; Tsaturyan, A.; Cabrera, M.A.; Tirado, J.; Tsetserukou, D. ZoomTouch: Multi-User Remote Robot Control in Zoom by DNN-based Gesture Recognition. In Proceedings of the SIGGRAPH Asia 2020 Emerging Technologies, New York, NY, USA, 4 December 2020; pp. 1–2. [Google Scholar]
- Xiao, C.; Huang, W.; Billinghurst, M. Usage and Effect of Eye Tracking in Remote Guidance. In Proceedings of the 32nd Australian Conference on Human-Computer Interaction, New York, NY, USA, 2 December 2020; pp. 622–628. [Google Scholar]
- Teo, T.; Lee, G.A.; Billinghurst, M.; Adcock, M. Hand gestures and visual annotation in live 360 panorama-based mixed reality remote collaboration. In Proceedings of the 30th Australian Conference on Computer-Human Interaction, Melbourne, Australia, 4 December 2018; pp. 406–410. [Google Scholar]
- Kim, S.; Lee, G.; Huang, W.; Kim, H.; Woo, W.; Billinghurst, M. Evaluating the Combination of Visual Communication Cues for HMD-based Mixed Reality Remote Collaboration. In Proceedings of the 2019 CHI Conference on Human Factors in Computing Systems, Glasgow, Scotland, UK, 2 May 2019; p. 173. [Google Scholar]
- Teo, T.; A Lee, G.; Billinghurst, M.; Adcock, M. Supporting Visual Annotation Cues in a Live 360 Panorama-based Mixed Reality Remote Collaboration. In Proceedings of the 2019 IEEE Conference on Virtual Reality and 3D User Interfaces (VR), Osaka, Japan, 23–27 March 2019; pp. 1187–1188. [Google Scholar]
- Teo, T.; Lee, G.A.; Billinghurst, M.; Adcock, M. Investigating the use of Different Visual Cues to Improve Social Presence within a 360 Mixed Reality Remote Collaboration. In Proceedings of the 17th International Conference on Virtual-Reality Continuum and its Applications in Industry, Brisbane, QLD, Australia, 14 November 2019; p. 4. [Google Scholar]
- Bai, H.; Sasikumar, P.; Yang, J.; Billinghurst, M. A User Study on Mixed Reality Remote Collaboration with Eye Gaze and Hand Gesture Sharing. In Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems, New York, NY, USA, 21 April 2020; pp. 1–13. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Application (Task Type) | Devices for Capturing and Visualization | ||||||
|---|---|---|---|---|---|---|---|
| Video Camera | HMC 1 | HMD | Smart Device 2 | Robotic Device | Projector | Display | |
| Surgery | [1,2,4,7,8] | [2,7,8] | [1,2,4] | [1,2,4] | |||
| Crime Investigation | [26] | [26] | [26] | ||||
| Building Wired Circuit | [27] | [27] | [27] | ||||
| Lego Assembly | [28,35] | [35] | [28,42] | [42] | [28,35,42] | ||
| Education | [29] | [29] | [29] | ||||
| Physical Task—Industry | [30] | [30] | [30] | [30] | |||
| Medical Consultation | [31] | [31] | |||||
| Aviation | [32] | [32] | |||||
| Car Maintenance | [33] | [33] | |||||
| Wiring tasks | [34] | [34] | [34] | ||||
| Object Manipulation | [36,37,53] | [38] | [36,54] | [37] | [36,37,38,54] | ||
| Object Pointing | [39] | [39] | [39] | ||||
| Maintenance—Industry | [41] | [40] | [60] | [41] | [40,41] | ||
| Object Identification | [55] | [54,58] | [43,44,45,54,58,59] | [46,55] | [43,46] | [45,46,59] | [45,46,54,55] |
| Cooking | [47] | ||||||
| Assembly—Furniture | [48] | [48] | [48] | [48] | |||
| Assembly Task | [57] | [49,50,51] | [57] | [52] | [57] | [51,57] | [51] |
| Sport—Education | [53] | [53] | |||||
| Manufacturing | [16] | [16] | |||||
| Application (Task Type) | Visual Display Methods | |||||
|---|---|---|---|---|---|---|
| 2D View | 3D View | VR | AR | MR | 360-Degree Panorama View | |
| Healthcare | [61] | |||||
| Object Reconstruction | [62] | [62] | ||||
| Assembly Task | [63] | |||||
| Physical Task | [64] | [64] | ||||
| Car Maintenance | [65] | [65] | ||||
| Object Manipulation | [66,79,80,87,92] | [66,79,80,81,83,84,85,86,87,94] | [66,83,87,94] | [66,79,80,83,87,93,94] | [66,81,82,83,84,85,86,87] | [84,85,86,87,93,94] |
| Lego Assembly | [72,73] | [72,73] | [72,73] | |||
| Maintenance | [74] | [74,78] | [74,78] | [74,78] | ||
| Maintenance—Industry | [77] | [77] | ||||
| Object Identification | [71] | [71] | [71,90,91] | [88,89,90,91] | ||
| Maintenance—Hydroelectric Power Plant | [92] | [92] | ||||
| Application (Task Type) | Communication Cues | |||
|---|---|---|---|---|
| Annotations | Gestures | Pointing | Eye Gaze | |
| Robot Building | [96] | [99] | ||
| Object Identification | [103,107,128] | [128] | [100] | [121] |
| Surgery | [101] | |||
| Lego Assembly | [97,98,102,105,106,109,122,127] | [97,98,113,116,119,122,123,127] | [102,115] | [115,116,122] |
| Puzzle Assembly | [104] | [104] | ||
| Wiring Assembly | [108] | |||
| Education | [111] | [110] | ||
| Industry | [112] | |||
| Printer Assembly | [114] | |||
| Design | [124] | |||
| Objects Manipulation | [126,129] | [126,129,130] | [120] | |
| Physical Task | [125] | |||
| Applications | Article Reference |
|---|---|
| Healthcare | [1,2,3,4,5,6,7,8,9,10,61,101] |
| Industry | [13,14,15,16,17,18,19,20,21,30,31,36,38,40,41,92,108,112] |
| Education | [11,12,26,29,34,39,47,53,95,96,99,110,111,121,125] |
| Assembly Task | [28,35,37,42,48,49,50,51,52,57,62,63,66,67,68,69,70,71,72,73,97,98,102,104,105,106,109,113,114,115,116,117,119,122,123,127] |
| Aviation | [32] |
| Crime Investigation | [22] |
| Maintenance | [27,60,65,74,75,76,77,78] |
| Object Identification | [43,44,45,46,55,56,58,64,71,88,89,90,91,100,103,107,128] |
| Objects Manipulation | [54,79,80,81,82,83,84,85,86,87,93,94,121,126,129,130] |
| Design | [59,118,124] |
| Component | Benefits | Drawbacks |
|---|---|---|
| Fixed Camera | Low cost | Reduced FOV 1 |
| Head-Mounted Camera | Worker’s hands are free for tasks | Reduced FOV Comfortless |
| Head-Mounted Device | Suitable for dynamic tasks Close to reality—immersive view | High Costs Comfortless |
| Smart Device 2 | Suitable for static tasks Low cost Plug and play Connect anywhere, anytime | Poor network performance Hands occupied Reduced costs |
| Robotic Device | Worker’s hands are free for tasks High degree of automation and control | Complexity Engineering costs Materials costs |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Druta, R.; Druta, C.; Negirla, P.; Silea, I. A Review on Methods and Systems for Remote Collaboration. Appl. Sci. 2021, 11, 10035. https://doi.org/10.3390/app112110035
Druta R, Druta C, Negirla P, Silea I. A Review on Methods and Systems for Remote Collaboration. Applied Sciences. 2021; 11(21):10035. https://doi.org/10.3390/app112110035
Chicago/Turabian StyleDruta, Romina, Cristian Druta, Paul Negirla, and Ioan Silea. 2021. "A Review on Methods and Systems for Remote Collaboration" Applied Sciences 11, no. 21: 10035. https://doi.org/10.3390/app112110035
APA StyleDruta, R., Druta, C., Negirla, P., & Silea, I. (2021). A Review on Methods and Systems for Remote Collaboration. Applied Sciences, 11(21), 10035. https://doi.org/10.3390/app112110035