
Analysis of Inductive Displacement Sensors with Large Range and Nanoscale Resolution

Abstract
:1. Introduction
2. Structure of Inductive Sensors
- (1)
- Zone1: Linear workspace zone in differential working mode;
- (2)
- Zone2: Nonlinear workspace zone in differential working mode;
- (3)
- Zone3: Nonlinear workspace zone in single-probe-dominated mode.
- (1)
- The inaccurate traditional calculation model of inductance vs. displacement characteristic can not meet the design requirements of large range inductive sensors;
- (2)
- In terms of circuit factors, there are complex error terms present in the transfer characteristic of differential inductive sensors;
- (3)
- Due to the existence of core loss, it is difficult to effectively improve the Q value;
- (4)
- There is a lack of a design rule to select the optimal excitation frequency for the inductive sensor.
3. Principle Analysis
3.1. Traditional Analytical Model and Its Limitations
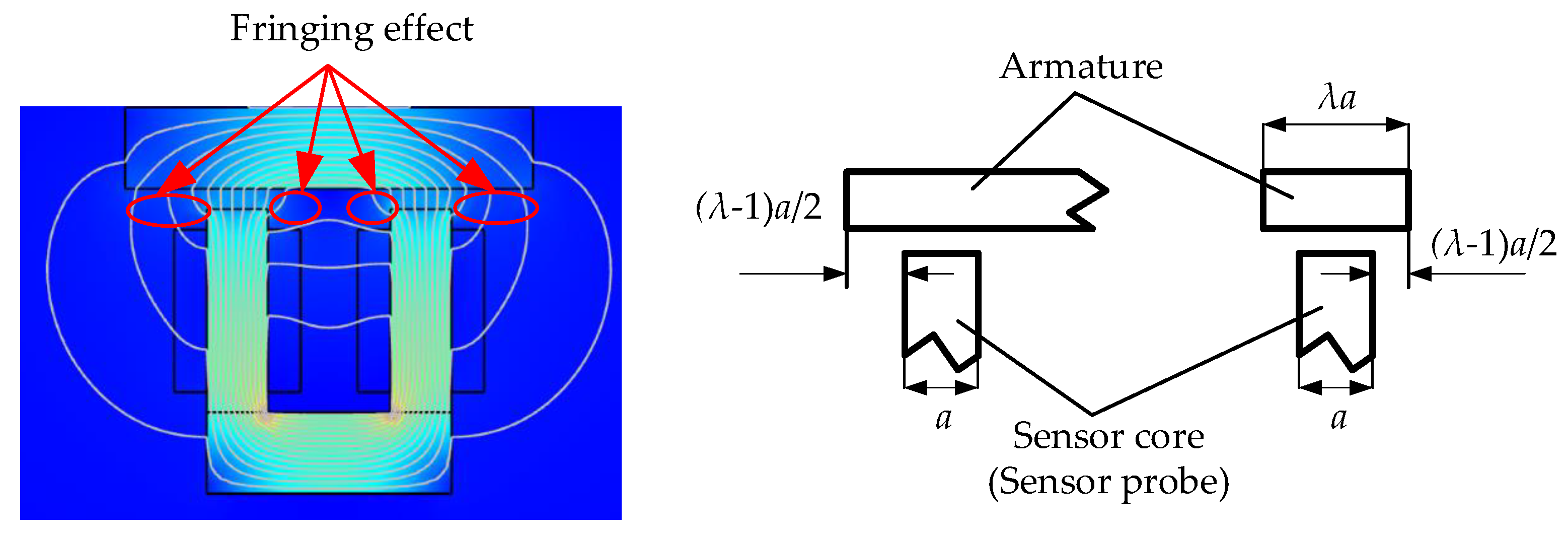
- (1)
- Ignoring the leakage inductance, the total inductance of the inductive sensor under different air gap cannot be estimated correctly, resulting in large deviation in the design of parameters of the sensor;
- (2)
- The fringing effect are not considered. When a large range differential inductive sensor is used to measure the armature displacement with transverse parasitic motion, the above model cannot guide the design of the armature size.
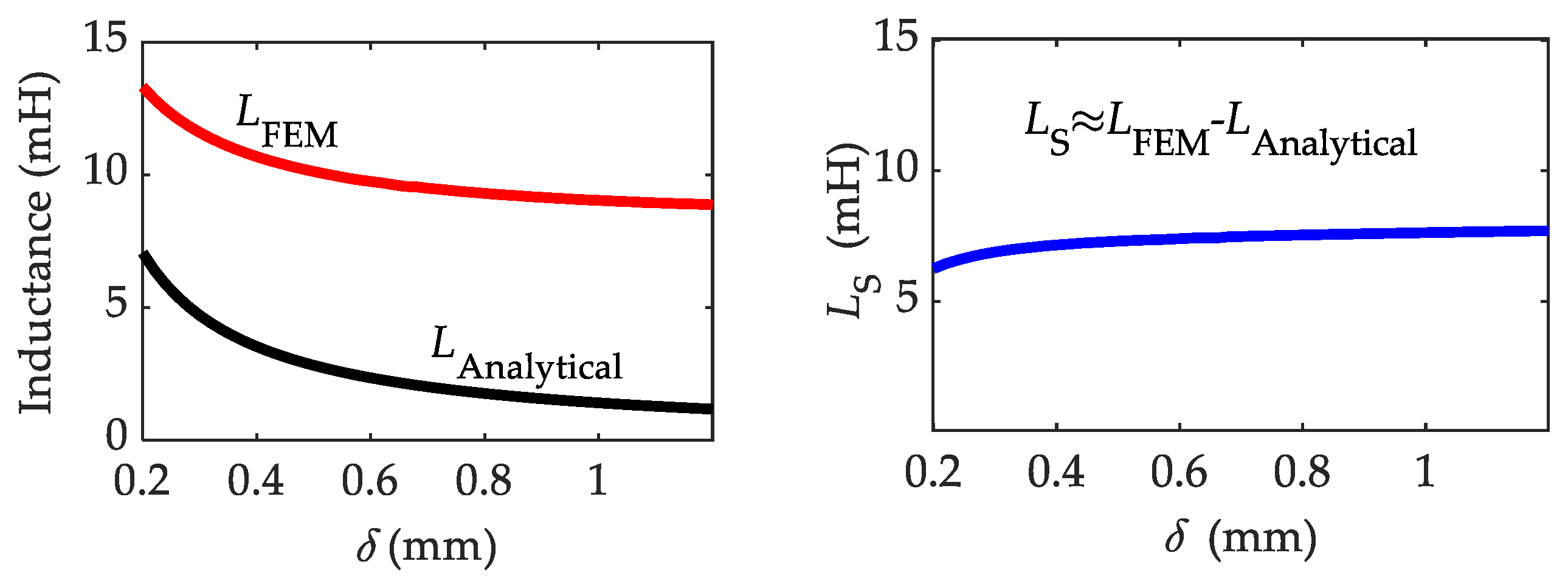
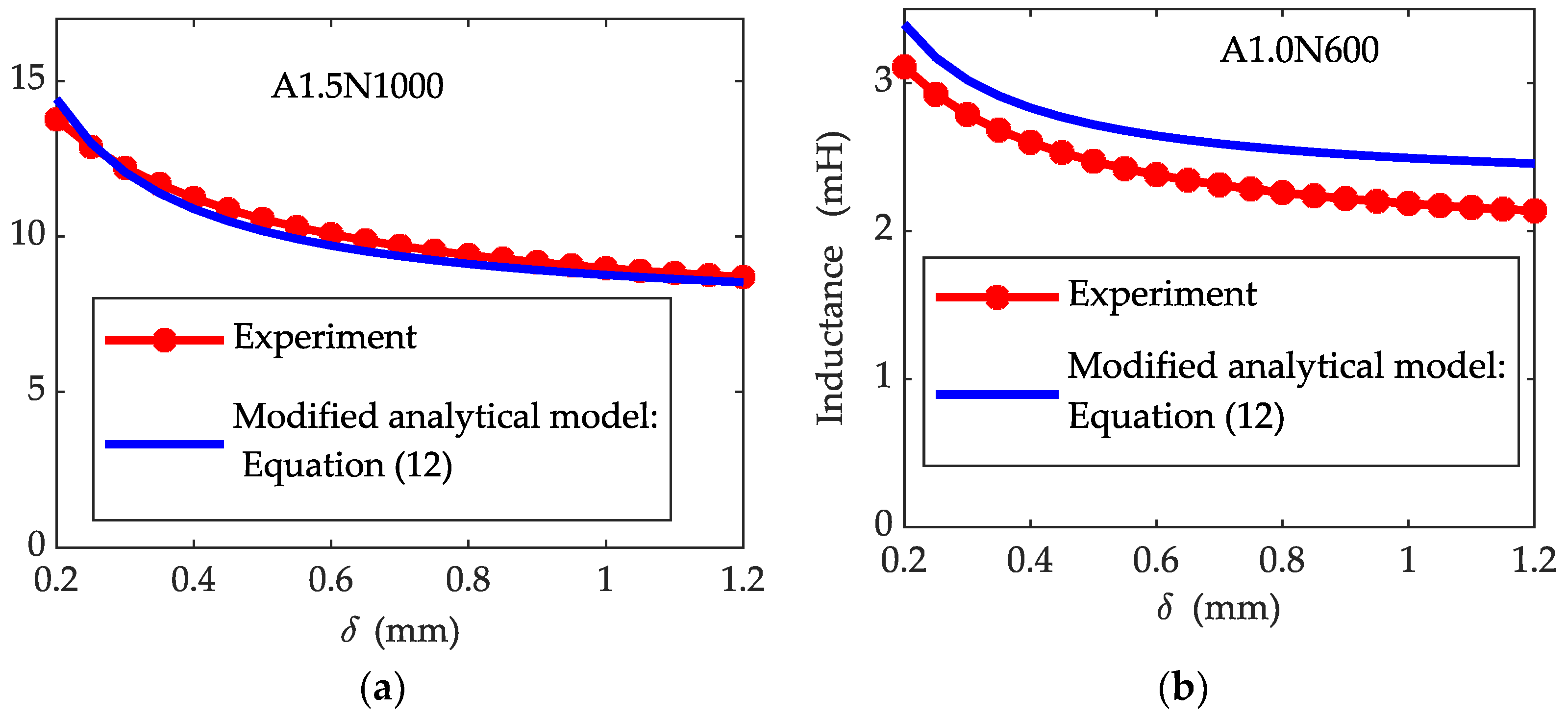
3.2. Finite Element Analysis and High-Precision Modeling of Leakage Inductance
- (1)
- Ensure the magnetic induction B works in the linear segment of the B-H curve of the core. If the induction corresponding to the maximum permeability is Bm, B < Bm must be satisfied;
- (2)
- It is suitable for the inductive sensor with the core of different permeable materials. However, the core materials with high permeability and low conductivity should be used whenever possible;
- (3)
- It is suitable for different excitation frequencies below 100 kHz;
- (4)
- The core must be the same as the structure proposed in this paper, and the core legs can also be cylindrical (correspondingly, a will represent the diameter of the cylindrical section of the core);
- (5)
- If the sizes of the core other than the dimension a have a significant change, the values of m, n in Equation (9) need to be corrected.
3.3. Fringing Effect Analysis and Armature Design Consideration
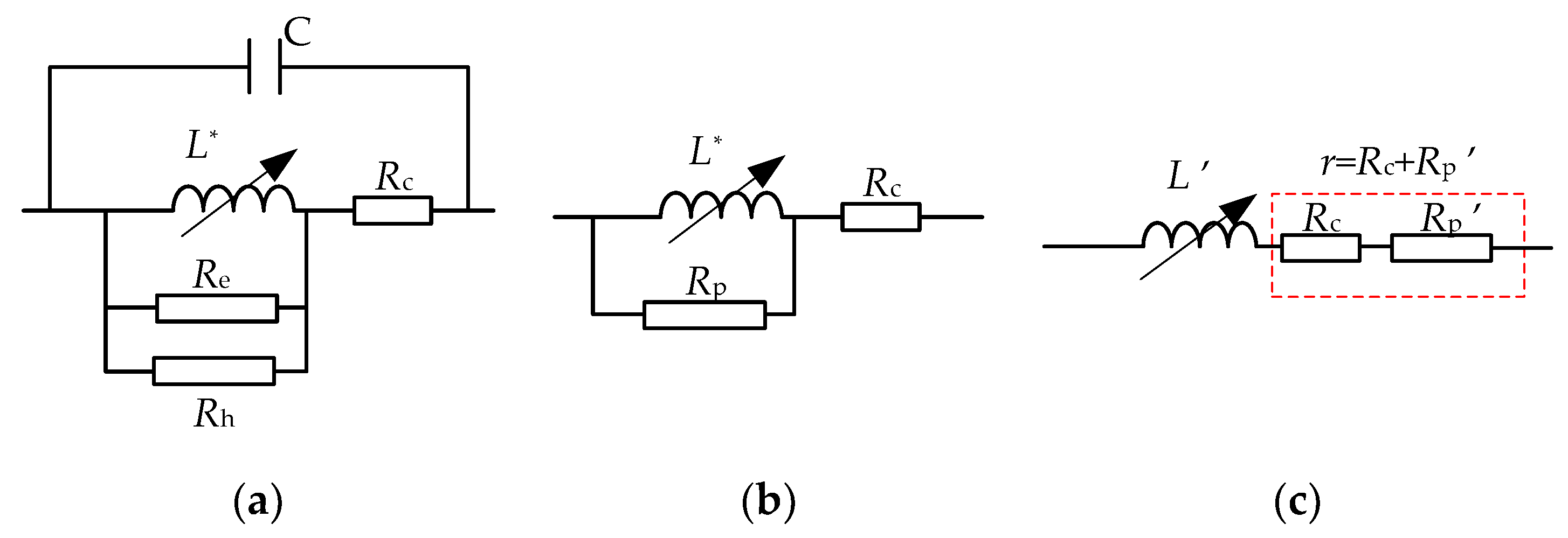
3.4. Measurement Circuit Factors
3.5. Sensitivity Analysis of Differential Inductive Sensors Considering Leakage Inductance
4. Q Value and Excitation Frequency Analysis
4.1. Basic Concept of Q Value
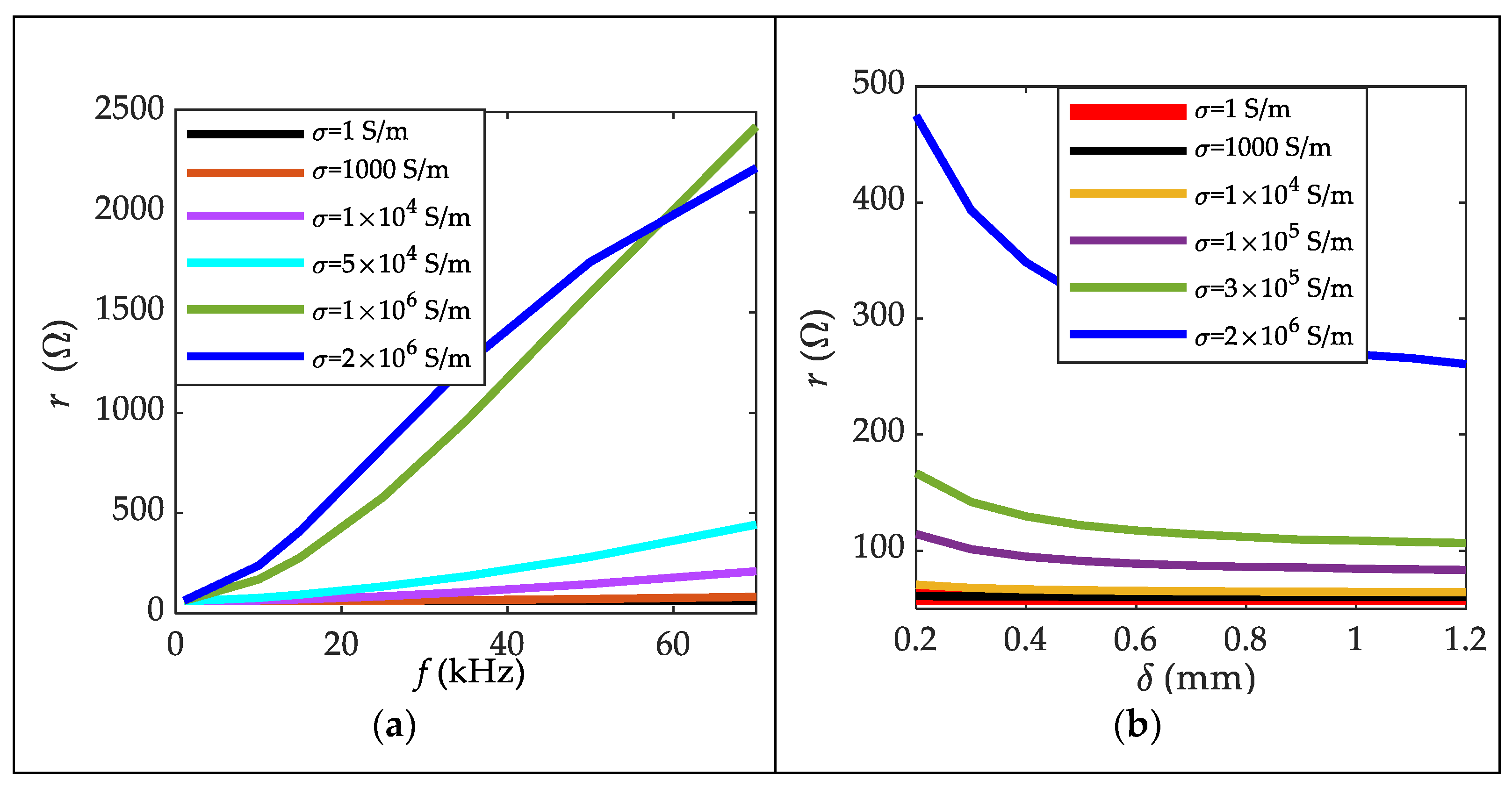
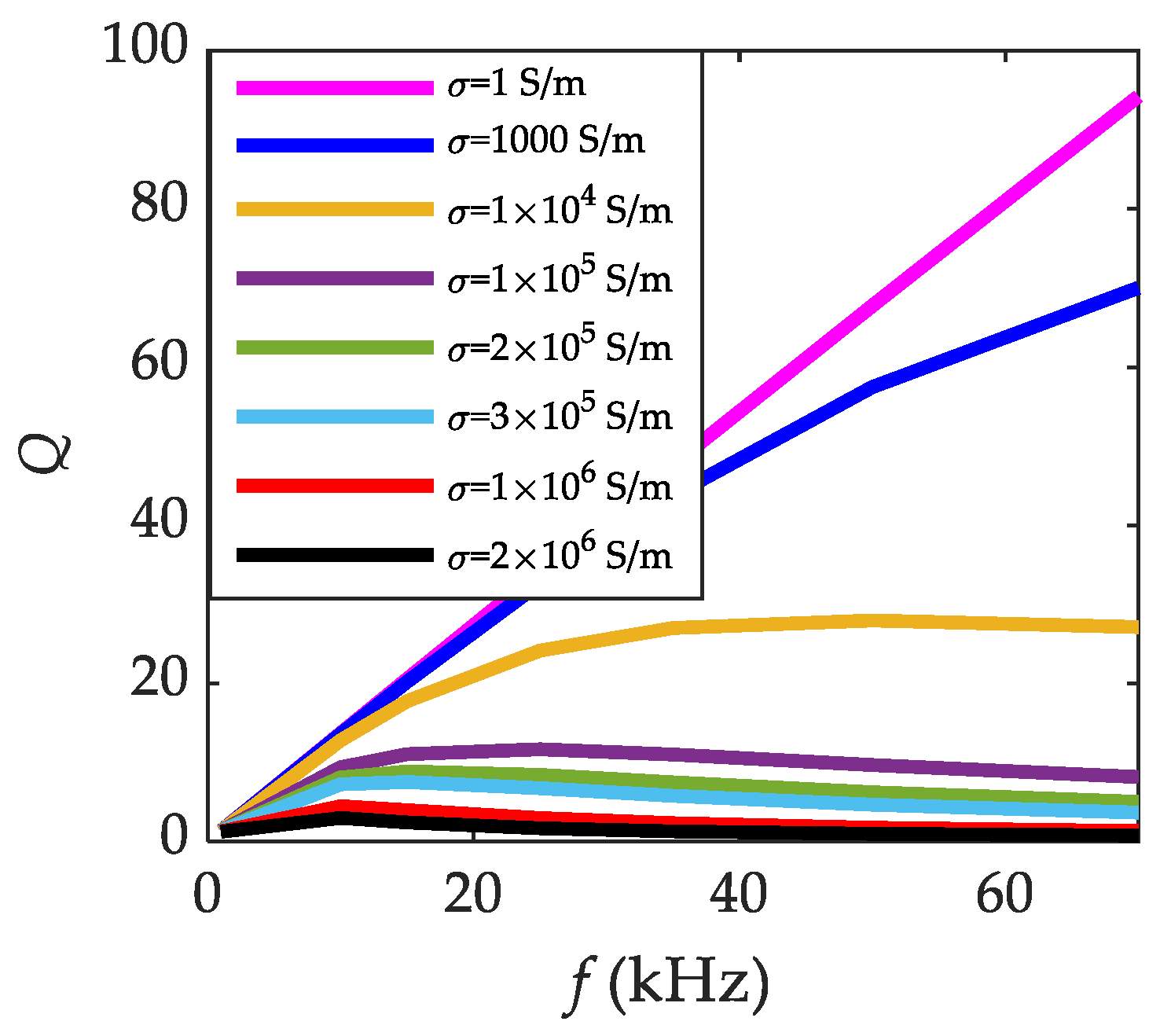
4.2. Core Loss and Its Influence on Q Value of Inductive Sensors
4.3. Selection Rule of Excitation Frequency
- (1)
- Ensure the excitation frequency must not exceed the frequency at which the Q value begins to increase with the air gap (f ≤ ft);
- (2)
- Ensure the excitation frequency must be greater than the minimum excitation frequency required for the sensor bandwidth (f ≥ fa);
- (3)
- Determine whether the maximum Q value, corresponding to the frequency fa ≤ f ≤ ft, satisfies the required minimum Q value. If satisfied, the frequency corresponding to this maximum Q value is the optimum excitation frequency to be selected. If not, the sensor will need to be redesigned.
4.4. Analysis for Increasing Q Value and Excitation Frequency
- (1)
- The magnetically permeable material with lower conductivity can be selected as core. However, the precondition of low coercivity and high permeability is required. Moreover, if the ferrite with low permeability is selected, the temperature stability and fragility of the core need to be considered;
- (2)
- Reduce the thickness of sheets of the laminated core. We need to consider whether the corresponding manufacturing process can be achieved, and whether too thin sheets will reduce the permeability of the core;
- (3)
- Reduce the cross-sectional dimension of the core. It should be considered that the sensitivity of the sensor will be reduced and the winding of the coil may be more difficult.
- (4)
- Increase the number of coil turns. It is necessary to consider that the size of sensor probe will increase. In addition, the increase of coil turns is limited by the area of the core window; In addition, the increase of coil turns will also make it difficult to guarantee the precision of coil winding. It is noteworthy that increasing the coil turns can only increase the Q value, but the allowable excitation frequency can not be effectively improved.
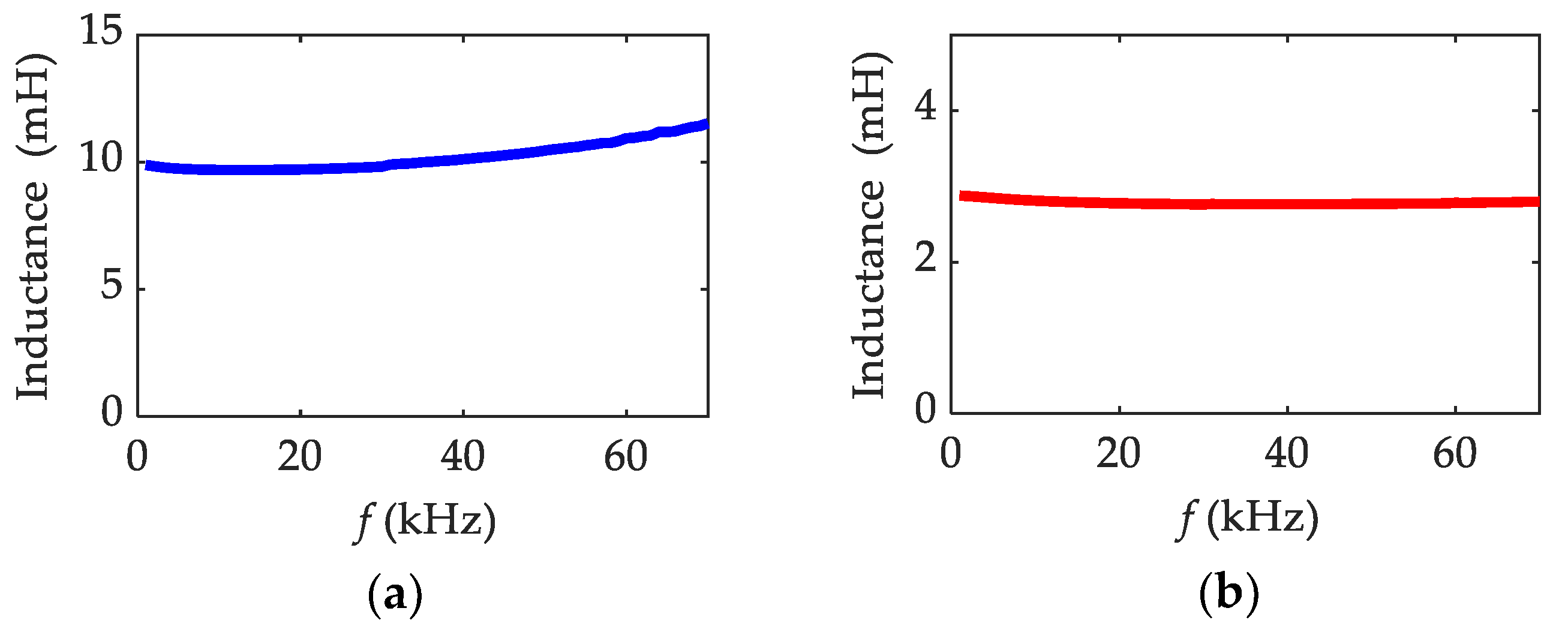
5. Experimental Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Polit, S.; Dong, J. Development of a high-Bandwidth XY nanopositioning stage for high-rate micro-/nanomanufacturing. IEEE ASME Trans. Mechatron. 2011, 16, 724–733. [Google Scholar] [CrossRef]
- Awtar, S.; Parmar, G. Design of a large range XY nanopositioning system. J. Mech. Robot. 2013, 5, 021008. [Google Scholar] [CrossRef] [Green Version]
- Fleming, A.J.; Leang, K.K. Design, Modeling and Control of Nanopositioning Systems; Springer International Publishing: Berlin, Germany, 2014. [Google Scholar]
- Fleming, A.J. A review of nanometer resolution position sensors: Operation and performance. Sens. Actuators A Phys. 2013, 190, 106–126. [Google Scholar] [CrossRef]
- Smith, S.T.; Seugling, R.M. Sensor and actuator considerations for precision, small machines. Precis. Eng. 2006, 30, 245–264. [Google Scholar] [CrossRef]
- Maresca, R.A. General method for designing low-temperature drift, high-bandwidth, variable-reluctance position sensors. Magn. IEEE Trans. 1986, 22, 118–123. [Google Scholar] [CrossRef]
- Philip, N.; George, B. Design and Analysis of a Dual-Slope Inductance-to-Digital Converter for Differential Reluctance Sensors. IEEE Trans. Instrum. Meas. 2014, 63, 1364–1371. [Google Scholar] [CrossRef]
- Velayudhan, C.; Bundell, J.H. Simple inductive displacement transducer. Rev. Sci. Instrum. 1984, 55, 1706–1713. [Google Scholar] [CrossRef]
- Wang, K.; Zhang, L.; Le, Y.; Zheng, S.; Han, B.; Jiang, Y. Optimized differential self-inductance displacement sensor for magnetic bearings: Design, analysis and experiment. IEEE Sens. J. 2017, 17, 4378–4387. [Google Scholar] [CrossRef]
- Cale, J.; Sudhoff, S.D.; Li-Quan, T. Accurately modeling EI core inductors using a high-fidelity magnetic equivalent circuit approach. IEEE Trans. Magn. 2006, 42, 40–46. [Google Scholar] [CrossRef]
- Aziz, M.; Indarto, A.; Hudaya, C. Study of material characteristics of core and winding to minimize losses on power transformer. IOP Conf. Ser. Earth Environ. Sci. 2021, 673, 012008. [Google Scholar] [CrossRef]
- Sato, T.; Sakaki, Y. Physical meaning of equivalent loss resistance of magnetic cores. IEEE Trans. Magn. 1990, 26, 2894–2897. [Google Scholar] [CrossRef]
- Zhu, J.G.; Hui, S.Y.R.; Ramsden, V.S. A generalized dynamic circuit model of magnetic cores for low-and high-frequency applications. I. Theoretical calculation of the equivalent core loss resistance. IEEE Trans. Power Electron. 1996, 11, 246–250. [Google Scholar] [CrossRef]
- Gawrylczyk, K.M.; Trela, K. Frequency response modeling of transformer windings utilizing the equivalent parameters of a laminated core. Energies 2019, 12, 2373. [Google Scholar] [CrossRef] [Green Version]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Principle | Manufacturers | Size (mm) | Range (mm) | RMS Resolution (@100 Hz) |
|---|---|---|---|---|---|
| DIT-5200-15N | Eddy current | KAMAN | ∅4.78 × 28.6 | ±0.25 | 3.5 nm |
| CS02 | Capacitive | Micro-Epsilon | ∅6 × 12 | 0.2 | 0.15 nm (@2 Hz) |
| ES-U1 | Eddy current | Micro-Epsilon | ∅6 × 30 | 1 | 20 nm (@20 Hz) |
| KRS719(01) | LVDT | Micro-Epsilon | ∅10 × 16 | ±1 | 1.4 µm |
| D-510.021 | Capacitive | Physik Instrumente | ∅8 × 30 | 0.15 | 1.5 nm (@20 Hz) |
| Type | A1.5N1000 | A1.0N600 |
|---|---|---|
| a | 1.5 mm | 1.0 mm |
| Coil turns, N | 1000 | 600 |
| Wire diameter of coil, d | 0.05 mm | 0.05 mm |
| Core material | Laminated Ni-Fe alloy (50% Ni) | Ni-Fe alloy (50% Ni) |
| Coil material | Copper | Copper |
| Range (mm) | Sensitivity at Zero Position (mV/μm) | RMS Resolution at Zero Position (nm) @100 Hz | RMS Resolution at Full Range (nm) @100 Hz | Maximum Mapping Error (%FSO) |
| ±0.5 | 0.71 | 2.2 | 13 | 0.1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, Q.; Fan, S.; Chen, N.; Tan, R.; Chen, F.; Fan, D. Analysis of Inductive Displacement Sensors with Large Range and Nanoscale Resolution. Appl. Sci. 2021, 11, 10134. https://doi.org/10.3390/app112110134
He Q, Fan S, Chen N, Tan R, Chen F, Fan D. Analysis of Inductive Displacement Sensors with Large Range and Nanoscale Resolution. Applied Sciences. 2021; 11(21):10134. https://doi.org/10.3390/app112110134
Chicago/Turabian StyleHe, Qiang, Shixun Fan, Ning Chen, Ruoyu Tan, Fan Chen, and Dapeng Fan. 2021. "Analysis of Inductive Displacement Sensors with Large Range and Nanoscale Resolution" Applied Sciences 11, no. 21: 10134. https://doi.org/10.3390/app112110134
APA StyleHe, Q., Fan, S., Chen, N., Tan, R., Chen, F., & Fan, D. (2021). Analysis of Inductive Displacement Sensors with Large Range and Nanoscale Resolution. Applied Sciences, 11(21), 10134. https://doi.org/10.3390/app112110134