1. Introduction
Nanotechnology involves the process of designing, fabricating, and manipulating materials at the nanoscale [
1]. The study of robots at the nanoscale is defined as nanorobotics, and incorporated technology is known as nanotechnology. Nanorobots are devices capable of sensing, actuating, signalling, processing information, intelligence, or exhibiting swarm behaviour at the nanoscale [
2]. They are comprised of various components that carry out specific tasks; the components are constructed at the nanoscale size and can range from 1–100 nanometers [
3,
4]. Nanobots (A.K.A. nanorobots), which are currently the focus of an emerging field of research, are also referred to as nanites, nanoids, nanomachines, or nano-mites [
1,
4]; however, in general, nanobot consists of two words—‘nano’ and ‘bot’. ‘Nano’ refers to very small or minute, and ‘bot’ refers to a device that can be controlled by a program, i.e. a short term for a robot [
1]. Nanorobots have several potential applications in the medical field including cancer treatment [
5,
6], surgery, precision medicine [
7], diabetes monitoring, dentistry, blood monitoring and drug delivery [
1,
4,
5]. Currently, mobile phones are proving to be a useful feedback device in accomplishing data transmission for communication, control, and energy supply inside the body. In addition, the emergence of new materials and their application in fabricating sensors and actuators has resulted in devices in the nanoscale range [
6,
7,
8,
9]. Due to the potential for nanorobots to work individually or in swarms in a wide variety of applications, ranging from medicine, environmental surveillance and monitoring, armed forces, and many more emerging applications, it is essential to conduct a review on the existing state-of-the-art nanorobotic systems [
1,
10,
11].
Nanomedicine is the method of diagnosing, treating, preventing disease and traumatic injury, alleviating pain, and maintaining and enhancing human health using nanotechnology and nanorobots [
4,
12]. Nanomedical robots can be used for many applications, such as targeting and early diagnosis of cancer, drug delivery, tissue engineering, gene delivery systems, cardiology, analysis of body vitals, monitoring of diabetes, minimally invasive brain surgery, and imaging and detection capabilities [
3,
13]. In all of these applications, the most important requirement is nanorobots to deliver the required drug to the target sites. Drug delivery is one of the key aspects in operations such as repairing tissues, cleaning blood vessels and airways, and transporting and delivering drugs to infected cells [
8]. Additionally, nanorobots have aided dentists in carrying out complicated operations at a microscopic level with enhanced precision [
14,
15]. With advancements in various applications, the utilization of nanorobots in medicine could elicit a paradigm shift from treatment to prevention [
16].
However, nanorobots face some limitations, including high design and development costs, high complexity, and difficulties with the interface. Due to the viscous nature of blood at the nanoscale, it is nearly impossible for the drug-carrying nanorobots to pass through blood vessels. The Brownian movement of the molecules causes collisions between molecules, and therefore the behaviour of the nanorobot becomes unpredictable and uncontrollable [
8]. This instability has been one major limitation and a critical challenge that researchers are attempting to overcome. The other main challenge is to develop appropriate feedback sensors to facilitate autonomous control at a deeper scale [
17,
18].
The concepts of micro and nanorobots are often interchangeable. The information regarding microrobots that appears in this study is applicable to nanorobots as well. Nanorobots must be highly effective, controllable, economical in mass production, and fully operational with minimal monitoring [
8]. However, they must also be small enough not to deteriorate living tissues physically upon entering the body, and they must be large enough to handle both endogenous and exogenous signals from multiple sensing systems [
19]. From the design aspect, the nanoscale structures required for different applications have not been developed due to the lack of effective processes in the field of nanotechnology. The manufacturing technique of the bottom-up approach—the idea of the atom-by-atom building of devices—is accepted by physicists, but due to the high reactivity of most atomic species, has not been preferred by chemists [
2,
20]. Other challenges faced by researchers include designing and fabricating nanorobots at dimensions below the nanometer range, and programming and coordinating a large number of nanorobots (known as swarms) [
16]. Moreover, other specific design issues like sensing, navigation, power communication, locomotion, and the manipulation of components are severe challenges in the field of nanorobotics [
4]. Another issue in terms of the nanorobotic structure is controlling matter at the molecular scale to affect the nanorobots’ behaviour (dynamics and properties). Overall, the automation, power, and manufacturing of nanorobots is a challenging and very novel area [
13].
The main focus of the paper is on challenges in the design and development of nanorobots in terms of sensors, actuators, powering, and data transmission. To the best of authors’ knowledge, these challenges have not been classified and reviewed as they are in the current paper. The aim of this review paper is to provide some useful and classified information about the available options explored by other researchers for new designers. The information provided in this paper will hopefully help others to expedite their research and develop new concepts and avenues. Challenges related to design and development, including sensors, actuators, communication channels for data transfer, power and navigation are explored in detail in
Section 2, followed by an overall review of these challenges concerning various applications in
Section 3. The risks and hazards associated with the application of nanorobots are briefly discussed in
Section 4.
Section 5 summarizes the conclusions made in this review study, followed by proposing future work.
2. Challenges in the Design and Development of Nanorobots
The architecture of a nanorobot for the purpose of medical applications is presented in this paper [
21]. The emergence of biomolecular science and modern manufacturing methods helps advance system miniaturization from micro to nanoelectronics. In recent years, many clinical procedures have been improved with the aid of microdevices in surgery and treatments [
6,
7,
8,
9,
17,
18]. This section will discuss the various challenges in the design and development of nanorobots.
Nanorobots must be able to perform essential operations such as targeting, energy supply, driving, operating function, and biocompatibility, etc. However, the most significant challenge is nanorobot’s work environment and its applications [
22]. Depending on the application, various temperature gradients and chemical concentrations in the bloodstream are key parameters in monitoring patients; to incorporate such monitoring practices, the design and development of nanorobots using VHDL (Very High Speed Integrated Circuit Hardware Description Language) has become the popular methodology in the Integrated Circuit (IC) fabrication industry. These upcoming methodologies in manufacturing, and new trends in transducers, computation, and manipulation, have paved the way for the development of nanorobots [
23]. Additionally, present-day innovations in nano-electronics and nano-biotechnology could lead to molecular machine manufacturing consisting of sensing, actuation, remote control, uploading, and data transmission; this, in turn, makes the functioning of medical nanorobots possible [
6,
7,
8,
9,
17,
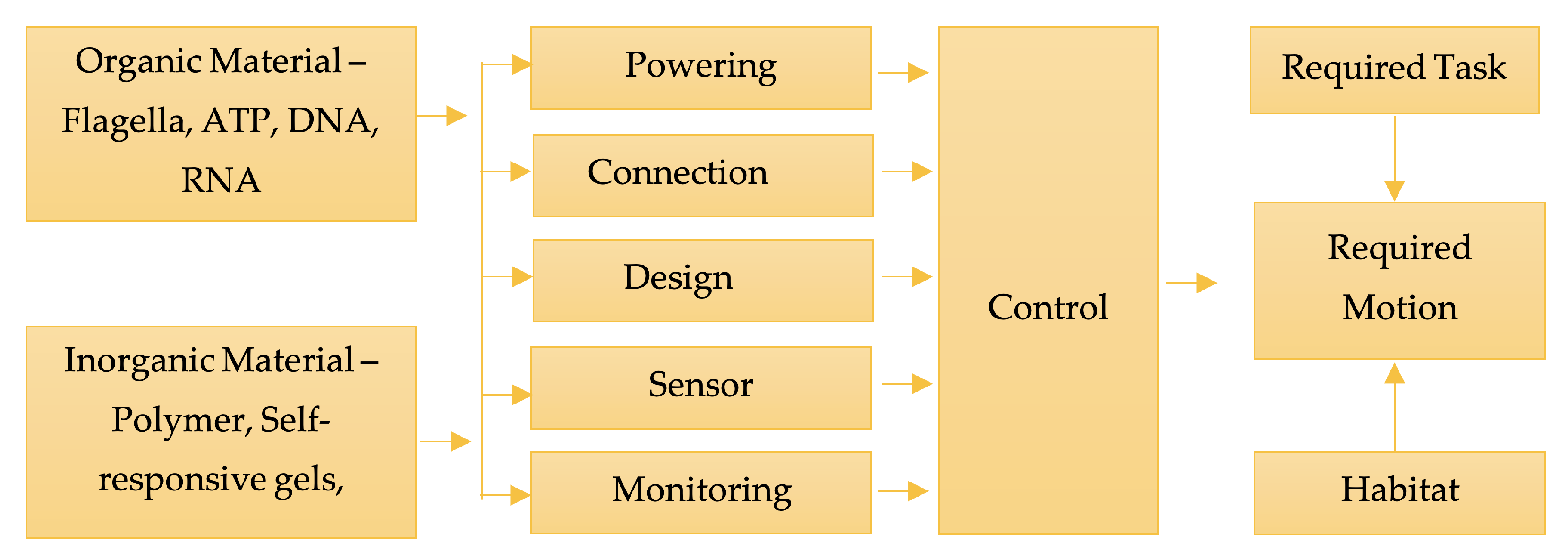
18]. Like a conventional robot, nanorobots are developed with a frame and components that can perform sensing and control operations. Today, inorganic material, flagella motors, DNA motors, virus protein linear (VPL) motors, and ATP motors are used to fabricate nanomotors. The main structure of the nanorobot is comprised of the frame component and connections to link each part of the nanorobotic system. These components can be constructed by using inorganic or organic materials, such as DNA and protein. As the connection components are used to link various parts of the robot, the driving component provides the force required to carry out a specific task [
22].
Figure 1 depicts basic architecture of a nanorobotic system. A comparison between the architecture of macro robots and nanorobots is provided in
Table 1.
The general challenges faced in the development of nanorobots, regardless of their applications, involve:
Positional nano assembly that is inefficient in regards to building nanodevices, and this method does not incorporate nanoelectronics,
DNA approach that cannot be employed to develop complex devices, and
Bacteria-based nanorobots, incorporating bacteria in the building of nanorobots, present a serious challenge, as bacteria is a living organism and therefore inappropriate due to safety reasons. Performance-wise, nanorobots depend on Brownian motion and electrical noise [
17,
18,
21].
It is very well-known that at the nanoscale, the traditional robotics paradigm sensor-actuator-control must be changed due to dimensional constraints. It means all these issues (sensors, actuators etc.) will come together and are integrated within nanorobots structures. The traditional method of reading sensors, processing the information, designing a control scheme to send commands to actuators to minimize the error between the desired and actual values of a parameter (e.g., velocity, position, etc.) might not be feasible to be used. Instead, new methods of integrating all these together to control the response or actions of a nanorobot should be proposed. For example, as will be explained in
Section 2.5, different imaging techniques can be used to localize the nanorobot inside the body, and that information can be used by the control system to send commands to the actuators or to navigate the nanorobot using variable magnetic fields. In this paper, the authors aim at explaining some challenges associated with the design and development of different robotic components such as sensors and actuators in nanoscale; however, it should be noted that, based on the structure of a nanorobot, that traditional robotics paradigm might be totally replaced by new methods. These aspects will be explained in sections after sensors and actuators. The development of nanoscale components is essential to the construction of a nanorobot; however, this is hindered by technological limitations [
22]. The fabrication of a nanorobot and its application in nanomedicine is limited by two main factors: (1) the status of current technological advancements, and (2) the limitations of a nanorobot to work in micro fluids [
22]. However, the first limitation has been overcome by the design and hardware control based on the progress of nanomechatronics, and with the rapid increase in advancements in nano-biotechnology, molecular manufacturing has led to the development of small-scale devices. These devices form an integral part of the nanorobot and are comprised of the main elements for sensing, actuation, the transmission of data, power supply, and control [
6,
7,
8,
9]. Complementary metal-oxide-semiconductor (CMOS) technologies have aided in the manufacturing of nanoelectronics and fabricated circuits, with sizes of the features in the tens of nanometers [
9]. The potential of nano processors has been demonstrated with the help of biocomputers, and advancements in nanotechnology techniques, genetics, and biomolecular computing have created a wide range of applications in medicine [
9]. The second limitation—to incorporate a nanorobot in a fluidic environment—has been a critical challenge in the field of nanorobotics and its application in medicine. Therefore, various studies have shifted towards the development of microbots (A.K.A. microrobots), broadly referred to as “swimmers”. Microbots are like their natural counterpart, and they perform well only in the presence of a nutrition or energy supply [
24]. However, the application of microbots may not be feasible due to the challenges below:
This section discusses the various limiting factors, current research, and compatibility of a nanorobot in a biological environment.
2.1. Sensors
The sensing component of a nanorobot and its feedback to a bio-computer or controller is achieved by chemical sensors or bionanosensors [
22]. Depending on the task to be performed, the information about the environment is obtained by sensors. Nanorobots depend on nanosensors to obtain information on the status of the position and operation; these sensors are classified as long-distance and short-distance sensors. Navigation of the nanorobot is carried out by the long-distance sensor, while the short-distance sensor aids in locating the unwanted cells [
22]. The fabrication of silicon-based chemical sensors and motion sensor arrays has been state-of-the-art in the last decade. These sensors are constructed using a two-level architecture system [
6,
7,
8,
9]. It is evident that the usage of nanowires and the costs of energy for circuitry operations and transfer of data are reduced by 60 [
9]. The assembly of circuits using nanowires and CMOS integrated sensors demonstrated maximum efficiency in regards to changes in the chemical environment, thereby promoting novel medical applications [
10]. Silicon circuits, which are constructed using suspended arrays of nanowires, have reduced self-heating and thermal coupling and increased the operational capacity of CMOS sensors [
25]. Nanosensors consume low energy and provide high sensitivity [
11]. Processes in the development of nanosensors will use electro fluidic alignment to achieve an integrated CMOS circuit assembly as multi-element systems [
26]. Passive and buried electrodes may be used to re-read the signal processing circuitry via cross-section control transistors. The passive and buried aligned electrodes must be electrically isolated so that processed signals are not lost [
12]. The drawbacks for improving Bipolar Complementary metal-oxide-semiconductor (BiCMOS), CMOS, and Metal–Oxide–Semiconductor Field-Effect Transistor (MOSFET) actuators include constructing smaller channel length and lowering the voltage of the circuitry, for which, new materials have been proposed, one of which is a SiGe (Silicon–Germanium) layer. This layer decreases self-heating, which in turn improves performance [
6,
7,
8,
9]. Cavalcanti et al. [
23] used CMOS sensors in their nanorobot device design as a radiofrequency identification device for in vivo positioning and navigation using a well-established protocol for communication [
27]. Cavalcanti et al. [
28] introduced computational nanomechatronics as a pathway for the design, development, and control of nanorobots using the CMOS technology in the design of temperature sensors, mineral detection, and data transmission.
Ultrasonic sensors and light sensors can handle nanorobots in the body in conjunction with motion strategy. Biochemical sensors will perceive chemical rates, PH, temperature, and ambient radiation—the bacteria’s “random walk” concept is the best example of this [
22]. Many groups use the mechanical, light, chemical, electrical and biological characteristics to build nanosensors; when PH changes, HSF protein combined with DNA strands causes the resolution colour changes [
29].
Apart from this, artificial taxis (also known as microbots) can replicate the ability of an organism to carry out sensing and responsive behaviour to an external signal. These taxis respond to concentration gradients (chemotaxis), surrounding fluid (rheotaxis), magnetic fields (magnetotaxis), or light (phototaxis) [
30]. The molecules in the environment are sensed using receptors on the surface of the bacteria. The bacteria can either hold or change the rotational direction of the flagella motors, thereby leading to a reorientation in the body. A movement towards the higher concentration of a chemical attractant thus leads to long straight ‘shots’ and fewer ‘tumbles’ of orientation, allowing the cells to find favourable conditions [
31]. Bacteria use environmental conditions to perceive variations between the chemical and physical stimuli. The turning action or reorientation of the bacteria is entirely based on the intensity of the stimuli perceived. However, such artificial systems that have the ability to respond to certain chemical cues and demonstrate compatibility with the environment face significant challenges. In recent years, microbots and active materials have been proven to exhibit the collective behaviours mentioned above [
32]. Biosensors can integrate living components like tissues or cells that are electrically excitable and can be used to measure the presence or level of a molecule in a physiological fluid [
33]. DNA and nanotubes have been emerging prospects in the field of nanosensors [
34]. These biosensors are used to detect fluorochromes, latexes, digoxigenin, particulates, antibodies, protein A, protein G, electron-dense materials, and chromophores [
35].
2.2. Actuators
Various types of actuators are currently being researched to be employed in the field of nanorobotics [
36]. One of the proposed actuators is constructed using biologically based components and has a mobile member that moves substantially linearly within the actuator as a result of biomolecular interaction between these components [
37]. For nanoscale mechanical systems, these actuators may be used to pump fluids, open and close valves, or to provide translational movement [
6,
7,
8,
9,
17,
18]. A flagella motor is one popular device that is used for the propulsion of a molecular machine, and an alternative for nanomotors is Adenosine triphosphate (ATP) [
38]. In other scenarios, the development of transitional devices by DNA and RNA has also been demonstrated. The use of Carbon Nano Tubes (CNTs) as conductive structures allows for electrostatically driven motions that provide the necessary forces for nano-manipulation [
36].
Polymers and gels that can respond to external signals such as light or temperature are known as smart soft materials. These materials, being an integral part of microrobots, use external control signals to actuate a response and are known as controlled actuators [
39]. Mobile microrobots use Liquid-crystal elastomers (LCEs), which are a type of thermoresponsive and/or photoresponsive soft materials [
40]. LCEs transition from an orderly (often nematic) phase to a disordered (isotropic) phase as the temperature rises above the critical value and/or the light stimulates a molecular photoswitch. The temperature-dependent or light-dependent molecular reorientation causes a transition in the material’s isovolumetric structure [
41]. Therefore, stimulus-responsive soft materials have advanced functionalities and locomotion strategies for microrobots [
42].
Smart soft materials can be used as onboard actuators to boost a microrobots control or to introduce different locomotion strategies. For example, a layer of thermoresponsive Poly(N-isopropylacrylamide) (PNIPAM) hydrogel can induce a change in shape in response to infrared light and propulsion characteristics of magnetic microrobots [
43]. Microrobots based on smart materials will simulate how micro-organisms travel through changes in body shape, with external fields influencing the internal actuating forces. Repeated changes in temperature around the LCST trigger an asymmetric cycle of shrinkage and swelling, allowing temperature-driven walking [
44]. However, the temperature change of the whole environment creates a significant issue for this technique of actuation.
Light can power microrobots made of photoresponsive soft materials; for example, light-powered motion can be attained by microribbons made up of a thin sheet of PNIPAM hydrogel loaded with nanorods with a 2 nm gold layer [
45].
Excitation of plasmonic nanoparticles by near-infrared light heats the PNIPAM microstructures, and this brings about irreversible deformations and disrupts their non-equilibrium actuation [
46]. On the other hand, locomotion at a small scale is achieved by actuating photoresponsive LCEs [
47]. For example, an LCE can be microfabricated into a structure with asymmetric rigid legs that are driven by light to walk directionally on pre-patterned surfaces with asymmetric friction [
48]. Control mechanisms that incorporate the help of light exhibit spatial and temporal resolution by selective control and actuation of various parts of the nanorobot [
49]. In this way, biomimetic locomotion techniques are made possible with the use of responsive materials that can also be used for cell and drug delivery functions.
The delivery of cargo can be achieved by the response of PNIPAM and various other smart gels. For example, cells can be caught and released by self-folding microstructures by means of temperature-controlled folding and unfolding, and the microstructures can shift by magnetic field control [
50]. Drugs and molecules may be loaded into the microrobots and released in response to an external signal or an environmental cue at a location [
51]. For instance, a magnetic microrobot can be constructed of a thermoresponsive hydrogel charged with magnetic nanoparticles and a molecular payload released on demand by magnetic induction heating [
52]. Instead, the payload may be activated by the unfolding of tubular microrobots with a graphene oxide hydrogel sheet centred on PNIPAM [
53]. Microrobots may often release molecules naturally in reaction to an external cue, such as a shift in pH that is frequently correlated with inflamed tissue or tumours. A magnetic microrobot, for example, can be coated with a chitosan gel layer that shrinks under acidic conditions [
54].
Self-oscillating gels are active soft materials that absorb energy and can be used in microrobots to implement various behaviours. The reaction-diffusion coupling induces wave propagation in a hydrogel greater than the chemical wavelength, resulting in peristaltic shape changes and autonomous locomotion of centimetre-sized gel strips [
50,
51]. Self-oscillating hydrogels may theoretically be used to build amieboid imitating microrobots capable of spontaneous movement; however, the long duration and low amplitude of the mechanical oscillations remain challenges to be overcome [
55].
Amoeboid locomotion refers to the various types of cellular locomotion. Cells such as leukocytes or cancer cells utilize amoeboid locomotion to move on 2D surfaces (for example, along blood vessel walls) and manoeuvre across 3D porous structures like the dynamic extracellular matrix polymeric network [
56]. Implementing ameboid locomotion in microrobots will be especially important for medical applications such as allowing the robot to enter biological tissues without the use of the vasculature [
30]. The cell’s cytoskeleton, which possesses unique out-of-equilibrium properties and can thus be represented as a “working gel” plays a crucial role in the locomotion of amoeboid [
57].
2.3. Powering and Navigation
In order to fulfill movement and operation of a nanorobot, it depends on the driving components, and there are two driving modes for nanorobots: passive drive and active drive [
22]. The former is used at body entry and in nanorobot control, while active drive uses an onboard molecular motor, electric nanomotor, pumps, or a membrane to power the nanorobot [
58]. Energy dissipates in the process of moving, running, and transmitting information; therefore, the guarantee for the task is adequate energy supply, and this conflicts with the nanorobot size limit. Internal sources of energy include microchemical cells and converted forms such as fuel cells, ATP motors, etc. External sources are further of two types wherein one dissipates energy in the form of current or light through contact, and the other involves the conversion of external energy through a converter onboard [
22].
There have been many attempts to build autonomously propelling robotic machines using motor proteins. Still, their implementation has been limited due to the characteristic unstable nature of protein in the diverse environment [
59]. Self-propelled micro/nanomachines available in different types, such as motors, engines, robots, and swimmers, ensure a broad scope in various medical fields. However, sensing, controlled delivery and release, biocompatibility, and propulsion are considered significant challenges in biological applications [
60].
Factors that are determined by surface area, such as rate of energy dissipation, become significantly important and limiting when considering its capacity to store fuel. Therefore, nanorobots must be able to harness energy from the external environment for their movement; for this reason, they have been developed in a variety of shapes (with spherical, helical, or asymmetric geometries). Depending on the force required for driving, the propulsion mechanism can be divided into two groups: fuel-based propulsion and fuel-free propulsion. Factors such as fabrication, scale-up, and cost would be pivotal in making these nanorobots commercially available [
60].
Henry Hess et al. demonstrated a nanoscale train using motor protein, which was inspired by the movement of the motor protein by the skeleton of the cell [
61]. The opening and closing of an actuator were achieved by using DNA components and fuels; this was demonstrated by Yurke et al. [
62]. The NC Seeman group built a spinning motor and the first biped nanorobot using DNA strands [
63]. The University of Cornell’s Carlo Montemagno group utilized special material to bind nickel nod to the ATP molecule, whereby the rotor rotates eight circles per second as the ATP hydrolyzes and the driving force and motion are achieved [
38]. Cilia and flagellum were natural engines for the Alex Zettl nanobot group, which built the smallest synthesis engine in 2003 with a diameter of 500 nm [
64].
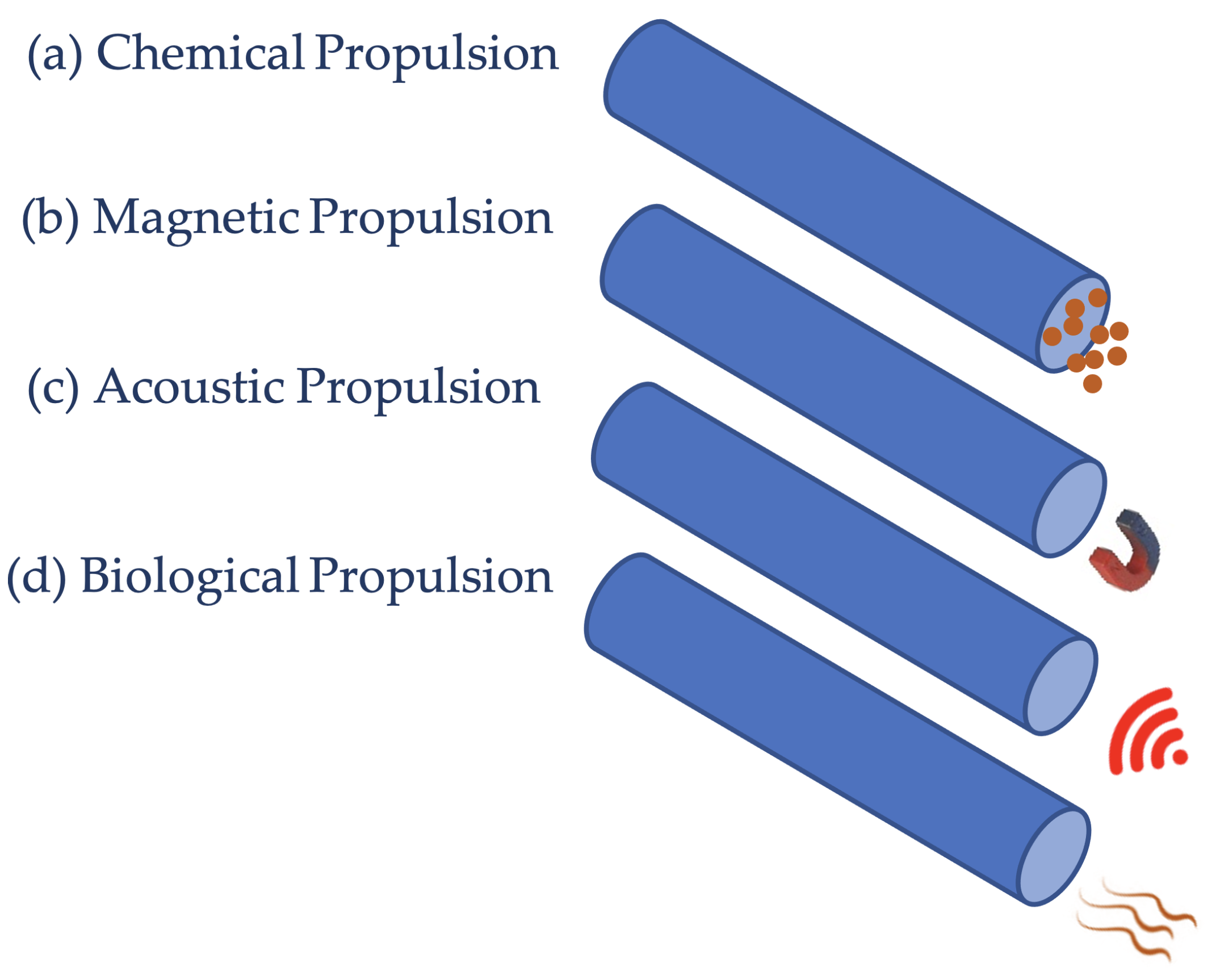
Microrobots were proposed for use in biomedical applications such as minimally invasive procedures, targeted delivery of drugs, or in vitro cell manipulation and characterization [
24]. Many of these applications place micro-devices in a fluidic or soft environment; therefore, it is appropriate to examine the methods of locomotion found in nature at the microscale for inspiration while constructing these microrobots [
61,
62,
65]. Four different concepts for propulsion are shown in
Figure 2. Comparison between different propulsion techniques with respect to speed is provided in
Table 2.
The Technical University of Munich (TUM) has developed a new electric propulsion system for nanorobots. The propulsion method is based on the fact that DNA molecules carry negative charges. Electric fields can thus be used to move proteins that theoretically allow DNA nanobots to be guided by electrical fields [
66].
The tiny robots are fixed with glowing molecules to their small arms. The alternate movement of light points back and forth was observed by Prof. Friedrich Simmel using a fluorescence microscope. The direction of light points was controlled by a simple mouse click [
66].
2.3.1. Fuel-Based Discussion
Fuel-propelled motors work in the presence of a specific fuel (aqueous solution) that allows them to propel themselves using motor composition-dependent surface reactions. The propulsion mechanism varies based on the reactions that can lead to concentration, electrical potential, and bubbles generated at local gradients. Despite various forms of motion being achieved using fuel-based propulsion, defining a proper trajectory has been a key challenge. Defined navigation has been attained by external chemical sources; however, due to their incomplete degradation in the environment, research has shifted towards using fuels that are biocompatible, such as glucose, water, and acid.
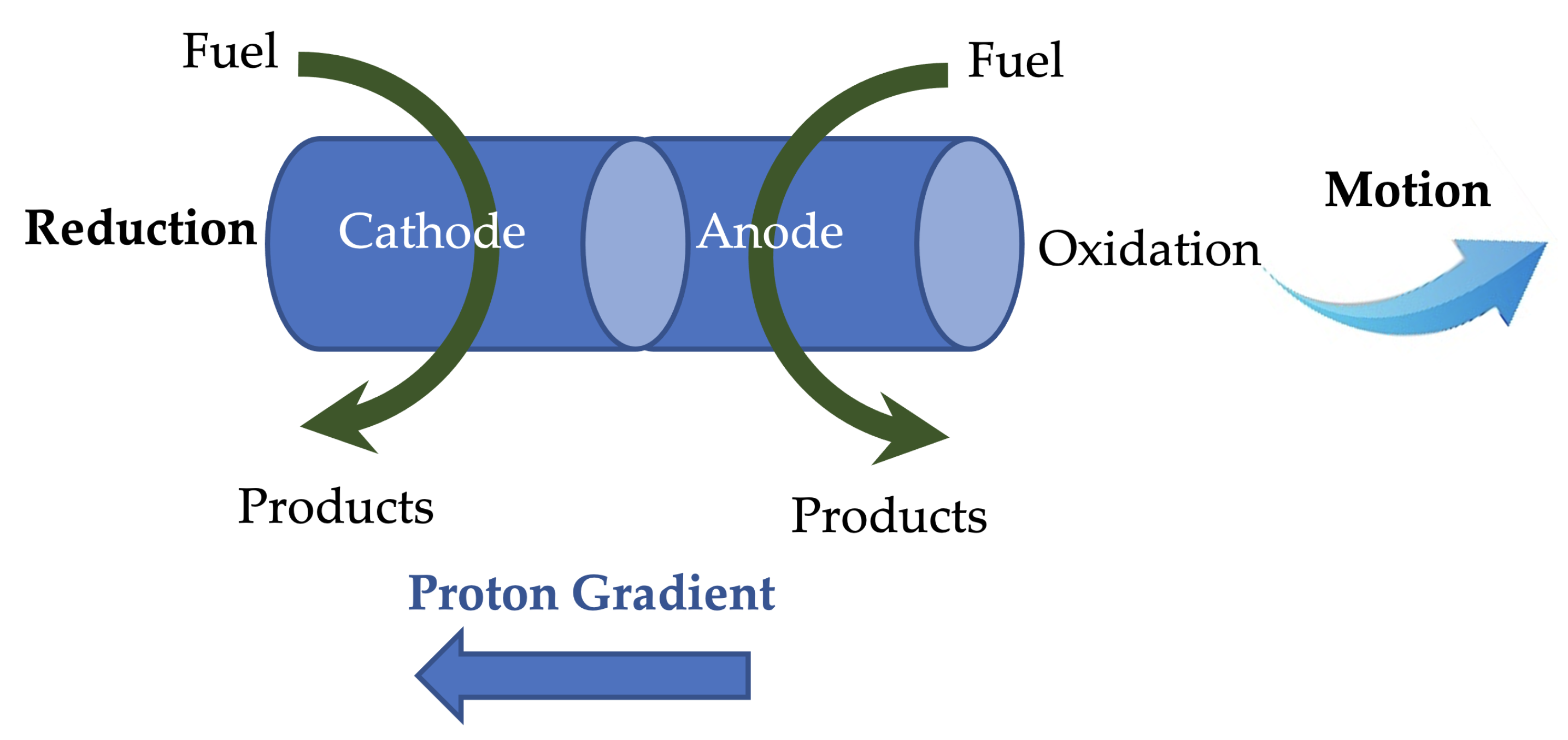
Interactions between the fuel and the motor generate chemical energy, which aids in the propulsion of chemically powered motors, and this is done with the help of a catalyst and an inert material. The catalyst decomposes the fuel, which acts as the source of power for the nanorobot. The process of self-electrophoresis (see
Figure 3) involves the generation of motion without the usage of external factors, which is possible as chemical gradients in the system develop a field for themselves [
67]. Bimetallic nanomotors typically display self-electrophoresis, and the first of its kind was Au/Pt, created by Sen et al. [
68]. By adopting a tubular configuration and using Au/Ag alloy instead of Au in the cathodic section, the speed of these motors was dramatically improved. A speed of 150 mm/s was demonstrated by Wang et al. [
69]. Using a nanowire-based motor incorporating carbon nanotubes, the speed was further increased to 200 mm/s [
70]. The Wang group also developed methods for controlling the movement of tubular motors by modulating the platform’s temperature and electrical potential [
67,
71]. Alternate fuels, such as bromide and iodide for self-propulsion, were also demonstrated by the Sen group [
72]. Another study by Posner et al. presented spherical-shaped robots and demonstrated that their speed was dependant on fuel concentration and diameter [
73].
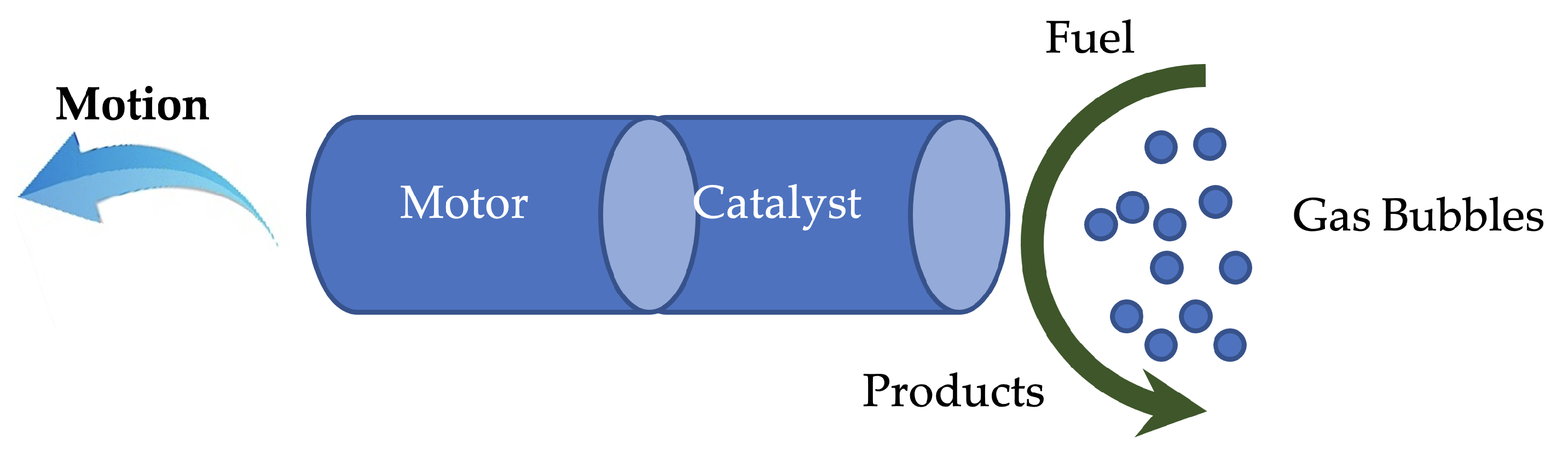
In addition to chemically active motors, synthetic motors have also been developed based on diffusiophoresis mechanisms (see
Figure 4). The catalytic part generates the reaction products, and this provides a repulsive force that propels away from the catalyst [
74]. Bubble-induced motion is another standard propulsion method that uses gas bubbles to provide the force for movement [
75,
76]. In this scenario, the decomposition of fuel by the catalyst results in the formation of gas bubbles, which provides the required thrust for the motor. Bubble propulsion has been achieved by various geometries like Janus motors, micro/nanotubular motors, and micro/nanoshells [
72,
73]. Motors based on Pt, Ag, and MnO
were also manufactured to achieve bubble propulsion in H
O
[
77]. Lastly, buoyancy-driven motion is another propulsion mechanism developed by Chattopadhyay et al. [
78,
79]. However, the above-mentioned motors depend on H
O
for their propulsion, which is incompatible with biological environments. To overcome this challenge, water-driven bubble propulsion was developed by Wang et al. [
80]. The motion of the motor takes place when H
O
breaks into water and O
. Plant-tissue-based motors demonstrated self-propulsion due to the catalase present; this was achieved using various materials like potato tubers, mushrooms, carrot roots, and millet seeds [
81]. Bandopadhyay et al. recently demonstrated chemotherapy drug delivery with magnetite-coated mushroom-based nanomotors based on their catalytic and magnetic properties [
82]. Sen et al. confirmed the possibility of the nanomotor application of enzymes, such as catalase itself [
83]. This result is a ground-breaking step in the direction of biocompatible nanomotors for applications such as catalyst isolation and drug delivery in the biomedical field.
2.3.2. Fuel-Free Discussion
The field of fuel-based motors is significantly advanced; however, some issues regarding the concentrations of used fuels, biocompatibility, in vivo toxicity, and the capacity for oxidation create an obstacle for their application, particularly in healthcare. Due to decreased fuel levels and the requirements in special cases, fuel-driven motors were replaced by fuel-free motors. Additionally, in order to overcome fuel dependency problems, fuel-free motors provide an improved trajectory and enhanced rotation and orientation. Fuel-free propelled motors act as driving sources by using the energy provided by external sources such as electric and magnetic fields, light, and ultrasound. Fuel-free propulsion provides advantages such as on-demand motion control, biocompatibility, lifespan, versatility, and sustainability by involving biocompatible external stimuli.
2.3.3. Magnetic Approach
Generally, magnetic motors consist of a magnetic material and, based on the type of applied magnetic field, they can be propelled accordingly. Magnetic motors have gained popularity in biomedical applications due to their low strength, which is harmless on cells and tissues. In addition, magnetic fields can travel unimpeded through water, allowing them to pass unabsorbed into the human body [
24]. This is one of the commonly used fuel-free propulsion methods [
60]. Nanorobots were widely driven by magnetic propulsion, which has proper navigation features and remote actuation. The principle involved in magnetic propellers, such as helical propellers and surface walkers, is that their function relies on the response to a magnetic field. To achieve navigation in biological environments, they must have low-resistance magnetic fields [
55,
84]. Various propulsion mechanisms can be accomplished under a magnetic field through various designs such as self-scrolled tubular helices, corkscrews, and radial magnetized helices [
85].
One of the most straightforward motion principles to mimic is the movement of a flexible flagellum, as it is a one-dimensional structure. A flexible beam or a sheet can be magnetically actuated when it is fixed to a magnetic head [
80,
81]. Magnetic surface walkers are one type of magnetically powered nanorobot; they create a hydrodynamic reaction with boundaries near them and break the spatial symmetry to activate propulsion [
86]. Magnetic surface walkers run under a spinning magnetic field in a roll or tumble motion [
85]. Thin micro/nano magnetic swimmers have been engineered to achieve propulsion through asymmetric deformation of thin filaments embedded in the swimmer, and this was influenced by spermatozoa [
87]. A versatile artificial flagella-based swimmer with a paramagnetic bead chain linked to DNA was demonstrated by Dreyfus et al. [
88]. A cost-effective approach of using bio templated synthesis was demonstrated; this was applied in the fabrication of helical motors by incorporating spiral water-conducting vessels of vascular plants [
89]. Magnetic helical swimmers contain a head and a helical body, which were inspired by helical bacterial flagella in which propulsion takes place based on a corkscrew mechanism [
90]. A periodic magnetization profile along the sheet can be built to induce the propagation of bending waves through an external rotating magnetic field [
91]. This method makes multimodal locomotion possible in millimetre-scale magnetoelastic robots [
92]. Magnetic flexible composites at the nano level can be achieved by loading elastomers with superparamagnetic nanoparticles [
93]. Artificial cilia were created by fixing rod-like magnetoelastic microstructures to a surface and were used to pump fluids [
94]. Cilia are hair-like appendages found in tightly packed arrays on the surface of several eukaryotic cells, for example, in the lungs for the transport of mucus. The propulsion by cilia is attained by continuous beating along with a spatially varying lag phase [
95]. However, cilia that are actuated by global magnetic fields beat in ideal synchrony without any lag, and therefore provide the required locomotion. The most important challenge faced in using a magnetically propelled nanorobot is that the magnetic field fades away with increased distance from the source. The source can be an electromagnet or a strong permanent magnet [
24]. The strength of a magnetic field relates to many factors, including the size of an electromagnet or permanent magnet, which in turn is proportionally related to the price of the magnet. Besides considerations and preparations needed for such a huge magnet, the price can be in the range of hundreds of thousands of dollars and not economical for some applications.
2.3.4. Bio-Inspired Nanorobots
As explained in previous sections, nanorobots, in general, comprise a frame, and driving, sensing, and control components. These components can either be linked by self-assembly or use external means to validate the connection [
22]. Presently, research has shifted towards developing bioinspired nanorobots. Bio nanorobots are composed of various biological components and can perform preprogrammed biological tasks at the cellular level. The nanorobotic system contains structural connections, power sources, or biosensors, and the required elements are DNA, carbon nanotubes, and proteins. At the molecular level, the bio nanorobot moves by transforming chemical energy into kinetic energy. Biomolecular motors are rapid, versatile, and have become popular due to their high molecular recognition and ability to self-replicate [
85]. The biggest challenge in developing these miniature machines is establishing a valid connection between organic and inorganic components.
The sulfurate and amiC DNA strand can be connected to a VPL engine, and a carbon nanotube with unique hydroxy terminals can also be connected to DNA strands [
96]. By plastering a PNA compound with a Single-Wall NanoTube (SWNT), Delft University’s Cees Dekker group linked hydrophilic DNA strands with SWNT antiwater [
97]. It is evident that problems in the fabrication of components lie in the connection of the components, as well as determining the robustness of the system. Aside from these challenges, the pivotal reason for using organic nanorobots is the enormous advantage over their inorganic counterparts; advantages include biocompatibility, self-reproductivity, low maintenance, and reliability [
96]. Because of these, nanorobots have been realized through organic methods by using gene strands with nanoparticles and modifying the surface of the machines to the biological environment [
98].
An interesting approach was proposed that involved combining natural species, such as microorganisms, with synthetic components to create biohybrid or organism-based motors. By achieving this integration, the required propulsion and responsiveness to external stimuli are fulfilled [
60]. Using the propulsion properties of microorganisms, nanorobotic systems were developed. The living bacteria propel the system while the external source of the field drives the system to the targeted areas [
85]. The most effective propulsion can be attained by using rotating flagella, which aids in locomotion and also in sensing the changes in temperature and concentration [
99]. These flagella are distinguished by their structure, protein composition, and propulsion mechanism. Based on this, there are two types: eukaryotic cells and prokaryotic cells [
99]. The latter is made from proteins consisting of thin filaments, and the driving mechanism is carried out by each of these filaments; the former involves cells that bend themselves into microtubules, and they instill back and forth movement to the cells by rotating in a clockwise (CW) or counter-clockwise (CCW) direction. This results in a separation of bundles that swim together before moving on to the next cycle in a process called tumbling [
85]. The emergence of these systems prompted many researchers to expand their scope, and the delivery of therapeutics has become efficient with good control and navigation [
99].
Leonardo et al. demonstrated that synthetic components can be used to trap the required bacteria and that these biohybrid micromotors are rapid and tunable [
100]. Magdanz et al. revealed a system comprised of a sperm cell in a magnetic microtube, whereby the system is guided using a magnetic field and propelled forward using the motile cells of the force [
101]. Pouponneau et al. developed a biohybrid nanorobot using magnetotactic bacterium and flagellum nanomotors; this robot used human capillaries to target certain locations [
102]. The challenge with biohybrid machines is to keep the viable component while also maintaining stable physiological parameters. Another key challenge with robot locomotion engineering methods is to duplicate or replicate the critical functions of their natural counterpart while keeping the complexity minimal in order to construct the device. Creating complex instruments at the micro and nanoscale has become increasingly difficult, as the integration of different parts is more challenging at such scales. Therefore, it is critical to retain the required functionalities of nature and to reduce complexity [
24]. Despite the difficulties mentioned, bio-inspired nanorobots developed based on different requirements include helical propellers, flexible filaments, flexible magnetic composites, and catalytic nanorobots.
2.3.5. Helical Propellers
Bacterial flagella consist of small, passive helical filaments that are actuated by molecular rotating motors at the base [
103]. Utilizing rotary motors at the nanoscale is a challenge, but artificial helical propellers that use bacterial flagella can be driven by external magnetic fields. The speed of such propellers relies on their helical shape [
104]. Rigid magnetic micro helices can be produced using a range of methods, such as self-scrolling; for example, rolling thin layers of material into different forms by regulating internal tension [
105]. Glancing angle deposition (GLAD) uses a tilted base to develop billions of micro helices or nano helices [
101,
102]. Another process of developing micro helices is known as direct laser writing (DLW), which involves coating the photoresist with biological helical templates [
103,
104,
106]. Using these methods, micro propellers or these helical structures can be developed. Micro propellers contain ferromagnetic material and are propelled by a magnetic field; however, additional approaches are required to overcome the molecular structure of biological fluids (other than water) to enable locomotion. For example, urease enzymes can be applied on micro propellers to replicate the strategy of Helicobacter pylori [
107]. Likewise, bacteria can evolve to incorporate different approaches for movement. The flexibility of the bacteria is used for locomotion, and there are two types of bacteria: monotrichous (mono-flagelled) and peritrichous (multi-flagelled). The flagellum is hooked to the shaft of the motor and aids in movement. The speed of the microrobot increases when the bundle of flagella has decreasing stiffness [
108]; thereby, changing the stiffness of the flagella bundles can impact the speed of the microrobot, and these machines can replicate the swimming principle of sperm cells.
2.3.6. Flexible Filaments
Sperm cells move via the propagation of bending waves, which are at least ten times larger than bacterial flagella [
109]. The viscoelastic parameters of the fluid determine the waveform of the moving eukaryotic flagella [
110]. Microbots that have a versatile tail will travel in a manner that resembles flagellated eukaryotic propulsion. Consequently, passive filaments operated at one end can act effectively as propulsive appendages for microrobots. Therefore, to replicate the movement of sperm cells, the active propagation of bending waves is required, as seen in the flagella of spermatozoa.
2.3.7. Flexible Magnetic Composites
As mentioned above, eukaryotic flagella exhibit bending waves via the distribution of activities and self-assembly of motors. A sperm cell can move autonomously even when it is detached from the body [
109]. However, incorporating these natural phenomena into artificial bending microactuators is a challenge, as they function with one-sided bending and require external control for propagation. Thereby, magnetic actuation with distributed magnetization can be used to achieve propagation of bending waves in artificial systems. For example, it was demonstrated that a flexible filament could be aligned with an external magnetic field by linking the magnetic microparticles of the filament with DNA and red blood cells. One end of the filament attached to the red blood cell will break the system, which produces the propagation of bending waves [
111]. The magnetically guided beating of the filament propels the microbot, dragging the red blood cell body in the direction of the tip of the filament, which is distinct from the pressing motion that flagella exerts on the sperm cell body [
111].
2.3.8. Catalytic Micromotors and Nanomotors
Many microorganisms harvest chemical energy in the form of nutrients from their surroundings. Similarly, catalytic micromotors and nanomotors propel themselves by harnessing and transforming chemical free energy (H
O
) into mechanical energy [
112]. This motion is governed by chemical reactivity, such as the nature of the reaction, the location of the catalyst, and the shape of the particle [
113].
2.4. Data Transmission
One of the most commonly accepted devices for communication is cellphones, and they can be used as highly functional and effective sensors to obtain wireless transmission of data from medical nanorobots embedded within the patient’s body. Cellphones can be a good option for tracking predefined levels (the normal range of values of something (e.g. glucose level) inside a human body to function properly) in various biomedical fields, such as diabetes care and other health concerns. To do this, chemical nanosensors can be inserted into the nanorobot to track glucose levels, for example. The nanorobot can then emit signals to prompt an alert if the patient is in immediate need of his or her doctor’s prescription drug. Electromagnetic radio waves are used to monitor and track the current state of the nanorobot inside the patient; this is achieved by a transponder system that emits a magnetic signature to the passive CMOS sensors embedded in the nanorobot, allowing data to be sent and received through electromagnetic fields [
114]. The monitoring data of the nanorobot transforms the wave propagation produced by the emitting signal through a well-defined protocol. This information can also transmit back using the resonance of waves [
115].
Some main data considerations include privacy, security, and longevity. All data, communicated during the operation of a robot, should be processed by a data transmission system that could be stored on a local server or on the cloud, depending on the application. To protect the users’ privacy, there should be a procedure to limit access to the database through which each user can have access to certain information. The system of information storage and protection is well-known among the users in the field; however, there is a small chance of getting hacked. With a system that is designed to rely on servers fully and cloud data backups, the importance of cybersecurity must be highlighted.
2.5. Monitoring
Monitoring of nanorobots is an essential task requiring the integration of different imaging technologies. Some of these medical imaging techniques are well-established and can be/have been used for this purpose. Despite many advancements in imaging techniques, the lack of high resolution and precise in vivo imaging approaches is a huge challenge in the translation of nanorobots into clinical applications [
116]. The precise control and visual servoing of nanorobots in a very high dynamic and complex environment depends on the imaging technique used in such environment, and there is no one-for-all solution in this regard.
2.5.1. Optical Tracking
The first and most commonly used method is optical tracking [
117]. Using optical tracking for localization of nanorobots requires precise calibration of the system [
118]. Some advantages of optical tracking systems is real-time observation, having simple equipment, low cost, and having high spatial resolution. However, 3D localization of microrobots using optical tracking is a challenge. The image can easily interfere with by noise or any contamination in the workspace. It means the optical tracking systems can only be used in environments that are transparent. These systems have been used for localization of nanorobots with promising results [
119].
2.5.2. Magnetic Imaging
Magnetic Resonance Imaging (MRI) is a medical imaging technique that was developed in the 1980s. MRI can be used for image acquisition from biological tissue in a non-invasive manner. It can provide very fine and precise images with high spatial resolution. A very strong magnetic field is provided by a huge magnet in combination with radiofrequency (RF) electromagnetic waves and magnetic field gradients. MR imaging is widely used in neurosurgery as it provides a contrast between the healthy and tumor tissue very well. In the last decade, fMRI or functional MRI has been used to study brain function with promising results. MRI has been used recently for in vivo tracking of and localization of nanorobots [
120]. Some advantages of MRI is having excellent tissue contrast, it can be used for 3D localization of nanorobots, it is biocompatible and non-invasive, and it can be used for both imaging and localization as well as micromanipulation of nanorobots via the magnetic field. Some disadvantages of MRI systems is the high cost, it is time consuming and real-time image acquisition can be challenging, and magnetic materials can cause artifacts and degrade the quality of the images causing a lower signal-to-noise ratio.
Magnetic Particle Imaging or MPI is an emerging method that uses a magnetic field. This method was introduced by Gleich et al. in 2005 [
121]. Currently, commercial MPI systems are being used to conduct research on animals such as rats. The main challenge for MPI systems is the size and how they can be manufactured in larger sizes to be able to use them on humans; however, they have the potential of localizing and manipulating nanorobots.
2.5.3. X-ray Imaging
X-ray is a well-established imaging technique. There are many techniques based on X-ray imaging, including CT Scans, radiography and fluoroscopy. Among these techniques, fluoroscopy seems to be the best approach to be used for the localization of nanorobots. It has been used by Navab et al. [
122] for visual servoing and control of the orientation of needles in animal studies. There is a good review paper by Azizian et al. on this topic [
123]. Some advantages of X-ray fluoroscopy are real-time imaging, high sensitivity, it can distinguish material densities very well, and it can penetrate into the human body in depth. The main disadvantage of X-rays is the radiation that causes cancer.
2.5.4. Ultrasound Imaging
The ultrasound imaging is based on the interaction of acoustic waves with human tissue. As ultrasound imaging is non-invasive, it is widely used in medical settings. It provides real-time imaging at a low cost, and it has minimal adverse health effects. Ultrasound imaging can be used for the manipulation of nanorobots. Some challenges and disadvantages associated with ultrasound imaging are that it cannot travel in the air and scatters very easily from bones. The scanning area of ultrasound imaging systems is minimal, and it can only penetrate the human body for a few centimetres. The resolution of ultrasound images is low, and can barely be used in the control or visual servoing of nanorobots. This method was used by some researchers for localization [
124].
2.5.5. Fluorescence Imaging
This method is a preferred approach for in vitro studies as it provides real-time imaging and is fast. It provides a very high resolution and sensitivity in 2D, but 3D localization of nanorobots can be challenging. This method usually requires extra surface modification of nanorobots and has limited penetration depth into the human body. This method has been widely used for in vivo tracking of nanorobots.
2.5.6. Ophthalmology
Some applications of nanotechnology to ophthalmology are explained in [
125]. These applications include the treatment of oxidative stress, measurement of intraocular pressure, theragnostics the use of nanoparticles to treat choroidal new vessels, prevent scarring after glaucoma surgery, and treat retinal degenerative disease with gene therapy; prosthetics; and regenerative nanomedicine [
125].
3. Challenges in the Application of Nanorobots
The applicability of micro/nanomotors for in vivo purposes, such as drug delivery and cargo transport, must overcome immune system clearance so as not to be lost as foreign material. Therefore, aside from increasing drug delivery and therapeutic effectiveness, overcoming the host’s immune system is crucial [
22]. Furthermore, nanorobots need to provide therapy with a high degree of precision when contacting the site; therefore, the motor must be able to penetrate through barriers provided by cells and tissues to distant areas of the host organism [
126]. In order to be used effectively in various biomedical applications, the design of micro/nano vehicles is of vital importance in performing the given mission. Consequently, the structure, form, and propulsion source must be carefully considered in order to project the nanorobot successfully as an effective sensor or delivery system for theranostics (combination of the terms therapeutics and diagnostics) applications [
60]. In traditional drug delivery systems, the small release of therapeutic molecules—ideally to unhealthy cells—is a severe restriction. Due to their directional movement, and tissue retention and penetration ability, autonomous micro/nanomotors open up possibilities for active delivery to the site of interest. For this reason, the technique generally involves encapsulation of the drug/gene/protein into micro/nanorobots, propelling them to the specified destination and triggering their release using physiological or external parameters [
127]. Some medical applications of nanorobots are shown in
Figure 5.
Wang and colleagues demonstrated an initial instance of using an artificial catalytic micromotor for the delivery and release of drugs; the group showed the transport and release of the drug molecule to the required targets [
128]. Although these systems are promising, H
O
is not biocompatible. Self-propelling nanotools have the immense ability to deliver surgical operations at an organism’s remote position. The use of ultrasound-triggered microbullets has been demonstrated in biolistic circulation and precision nanosurgery [
51]. Such advances illustrate the power achieved in micro/nanomotor propulsion and signify a noteworthy phase in the realization of prominent nano surgical devices.
The most notable use of such micro/nanomotors may be their use in vivo. This can be said based on the enormous uncertainty involved and the challenges that must be overcome. In vivo applications require extremely small motors for an enhanced capacity to penetrate. Furthermore, addressing the biocompatibility problems related to artificial motors is of utmost importance [
129]. As mentioned in previous sections, fuel-based and organism-based nanorobots were developed for biomedical applications. Nevertheless, the in vivo application of micro/nanomotors is in the budding process, and relentless effort has been devoted to the steering, storage, imaging, and tracing of micro/nanomotors in this setting [
130].
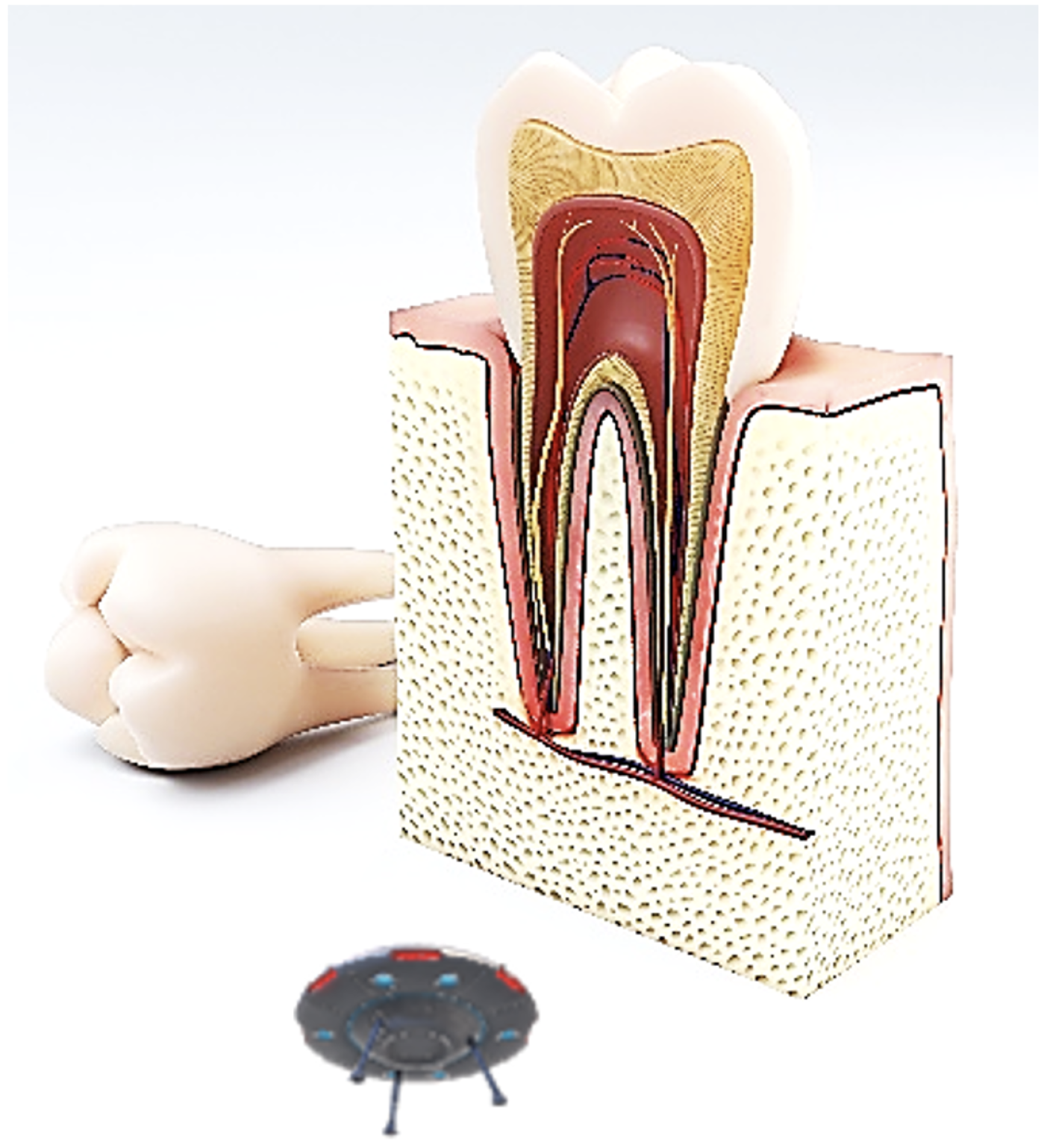
In dentistry, nanorobots can be applied to improve dentine hypersensitivity and teeth durability and can be used to carry out orthodontic treatments such as realigning and straightening irregular teeth. Significant applications of nanorobots in the dental field include anesthesia and osseointegration; carrying dentine tubules for blocking tooth hypersensitivity; contributing to orthodontic treatments by allowing painless tooth up-righting, rotating, and vertical repositioning; or acting as nanoneedles [
17]. These applications have been possible due to the polymeric materials available today, which include bio nanocomposites prepared with polymers, such as biocompatible collagen, alginate, silk, poly (lactic acid), poly (glycolic acid), poly (lactic-co-glycolic acid), and poly (caprolactone). Bio nanocomposites with inorganic materials have also been developed, and these include bioactive glass nanoparticles, magnetic nanoparticles, carbon nanotubes, hydroxyapatite, silver or gold nanoparticles, graphene oxide, titanium oxide, and silica nanoparticles [
15].
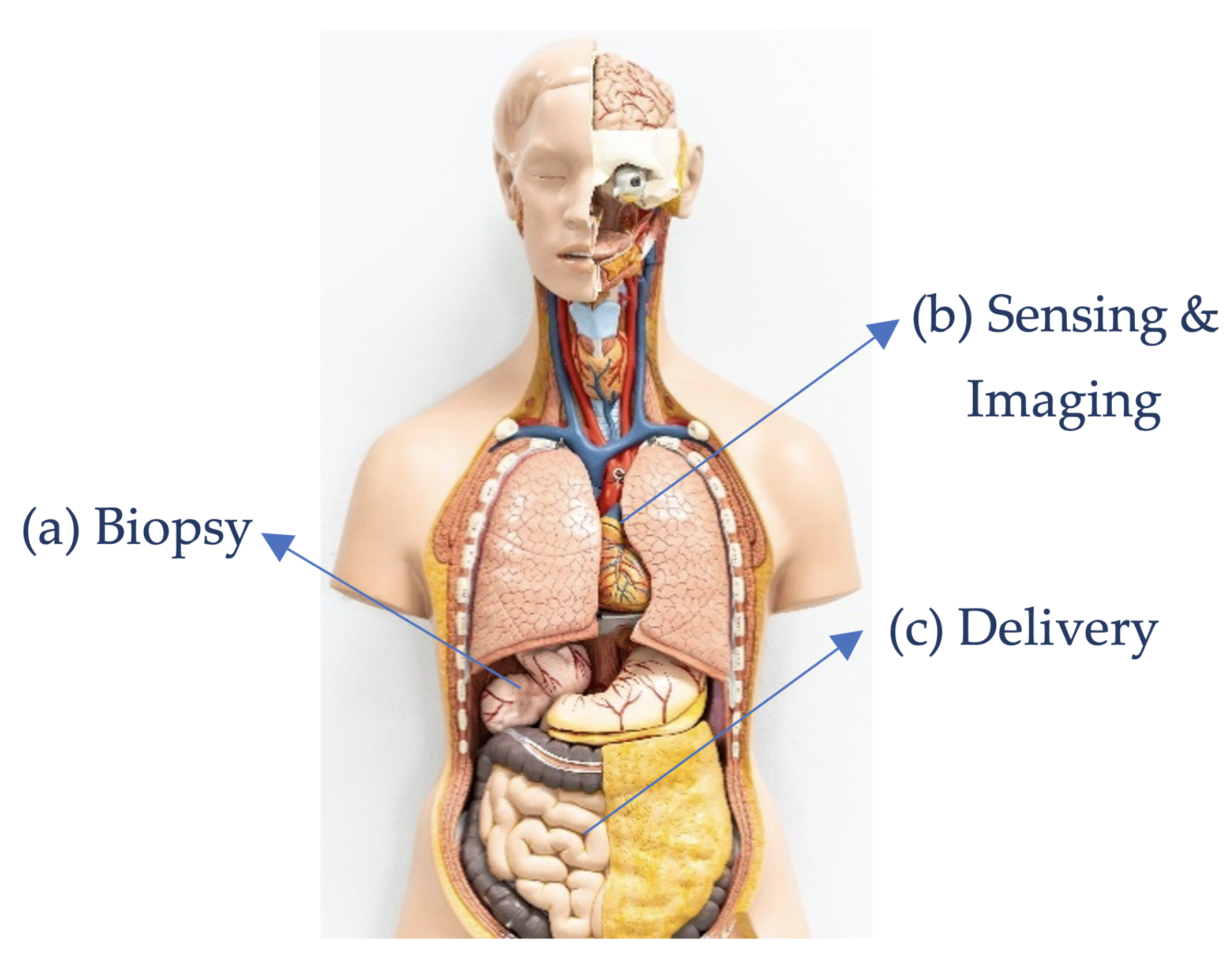
Figure 6 shows some medical procedures performed by nanorobots.
Figure 7 shows application of nanorobots in dentistry.
One of the most promising areas in which nanorobots may play a vital, life-altering role is in the treatment of injuries related to spinal cord and nerve damage. The regeneration of axons using enriched scaffolds and the improvement of nerve reconnections is feasible with nanotechnology. The axon surgery has been demonstrated to effectively possible with the use of a 40 nm diameter nano knife, which aided in the individual manipulation of axons [
20]. The movement of axons under precise control was achieved by a process known as dielectrophoresis; this method uses electric fields to control and move objects in surgical fields. Once the axons are positioned by this process, an electrofusion technique is used to fuse the ends of axons. Other techniques used for fusion include laser-induced cell fusion or polyethylene glycol.
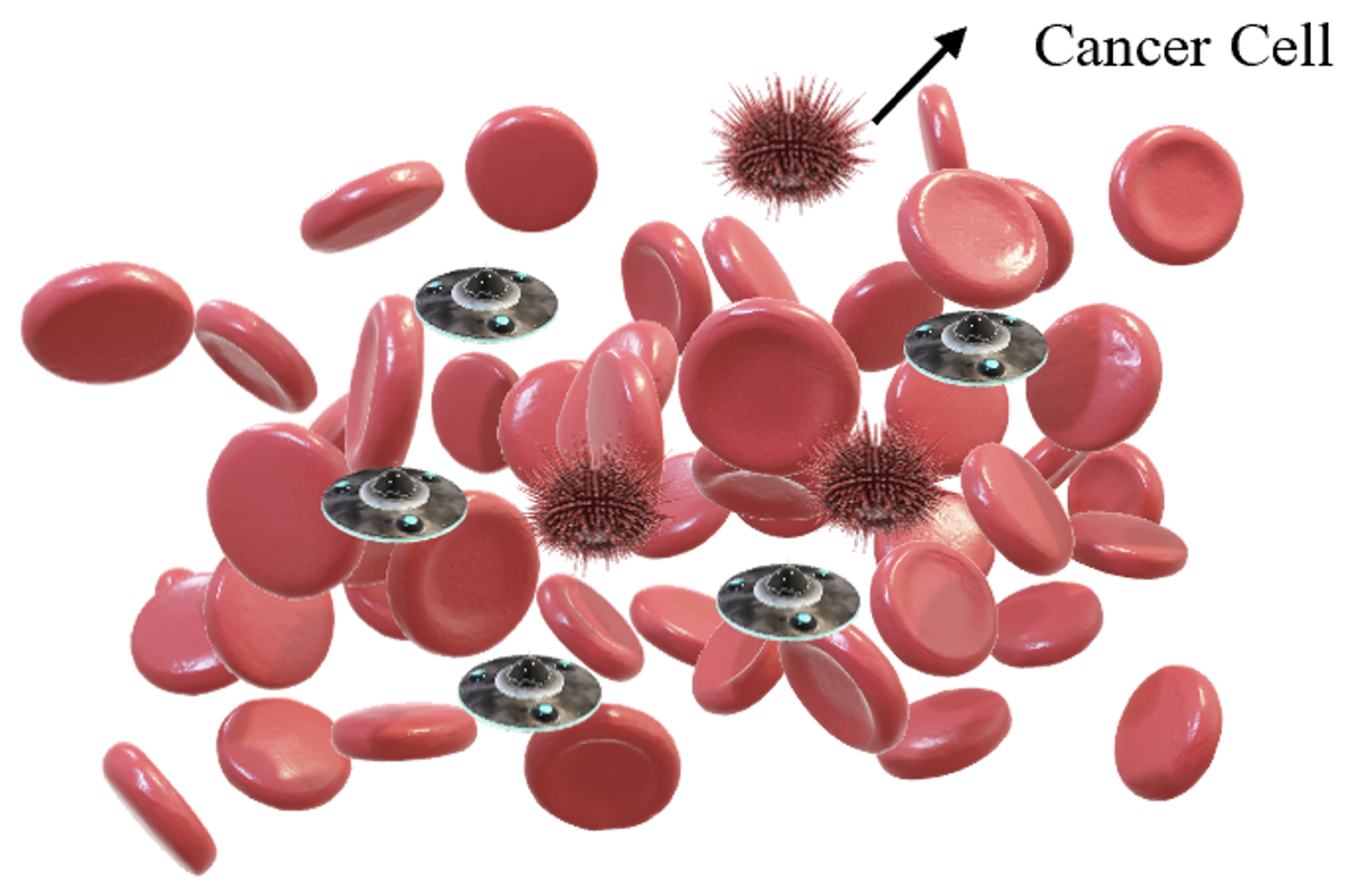
Figure 8 shows the application of nanorobots for selective destruction of cancer cells.
One of the prominent applications of nanorobots is the ability to reconnect nerves with precise control. It was reported that, once their cerebral aneurysm ruptures, ten individuals die before reaching the hospital, 25 die within 24 h, and 50 die within the span of 30 days. To prevent these outcomes, nanorobots were incorporated to monitor and screen for the development of new aneurysms inside the human body [
131].
The use of nanorobots would advance biomedical operations such as minimally invasive surgery, aid patients who require continuous supervision of body function and increase care quality by early detection of potentially serious diseases [
21]. Patient screening would better prepare for neurosurgery, early-stage cancer detection reports, and blood pressure management in patients with cardiac problems [
117,
118,
119,
132]. This exact technique can be used to monitor blood glucose levels in patients with diabetes [
120,
121]. Improper regulation of blood glucose may have a wide range of effects on the nervous system, the liver, and the lungs and can increase the risk of heart attack and stroke [
133]. Valuable data collected by a nanorobot would help clinicians track and enhance the intake of the patient’s drug and diet. After this process, the nanorobot would be removed or disposed of according to instructions.
Wearable technologies have been the focus of many research studies in recent years. With advancements in design and manufacturing new sensors, actuators, and processors, combination of wearable technologies with nanorobots is becoming a possibility in near future for medical applications. Wearable technologies can boost the development and application of nanorobots in medicine as the level of uptake in societies has shown promising results. This fact can in turn boost investments in the field of nanorobots and further help in new enhancements in the technology itself.
To conclude, even by considering recent advancements in the field of nanorobots, this field is still far away from being used in clinical applications. Issues related to biocompatibility and toxicity and the risks associated with the introduction of such robots in the body are still outstanding and need proper consideration and experimental research studies. These are some reasons that regulatory bodies such as FDA (U.S. Food and Drug Administration) are still hesitating in approval of such systems as governmental regulations are lacking.
4. Biocompatibility and Toxicity of Nanorobots
Researchers have not completely understood the interaction mechanisms between nanorobots and living systems, as the complexity with the interaction of materials used to build nanorobots, with biological matter vary that may lead to change the nanorobots’ surface characteristics based on the environment that they are placed [
134]. Thus, the associated potential risks and hazards are not fully identified. Experimental studies have shown that the particles of the same material may exhibit completely different behaviour for different reasons, such as differences in surface coating [
135]. Besides, there are many more parameters that should be taken into account while working with nanorobots, including material, size, shape, surface coating, sensory and actuation mechanism used, working environment in which the nanorobot is functioning [
136]. Hazard identification of the use of nanorobots in the human body remains at an early stage; however, some efforts have been made to identify major entry routes such as lung, gut, and possibly skin as well as putative targets such as lung, liver, heart, and brain [
137].
Depending on the design of the mechanism, the material used, driving and sensing systems implemented, and the site of deposition in the human body, the level of toxicity may vary in severity [
138]. Consequently, to maintain clinical relevance, information on toxicity is presented using a system-based approach focusing on lung, dermal, liver, and nervous system targets that are well discussed in [
135].
5. Conclusions
Nanorobots have the potential to play an important role in the elimination or cure of common diseases, along with improvements in physical and mental capabilities. However, the dynamic properties of nanorobots are still under investigation and experimentation; this is mostly due to the requirement of nanorobots to interact with the environment at a cellular level, which remains a significant challenge. To effectively incorporate the movement and navigation of nanorobots at the nanoscale, small-sized motors and other propulsion mechanisms are required to fit into these tiny machines. Moreover, different types of sensors in the nanoscale should be developed. While this may seem impossible to achieve, various research groups are working on utilizing this biomimetic approach. It might be concluded that, although it may seem illusory, continuous research that is carried out by teams from different backgrounds can make this possible in the near future. The domain of nanorobotics in medicine can be made attainable by overcoming nanomanufacturing limitations. Consequently, the various applications discussed in this review may be realized in the future, thereby making nanorobotics a unique tool in medicine. This review was an attempt to explore various challenges associated with the design and development of nanorobots and their applications, in the hope of making them a viable solution for many diseases in the near future. As the technology of nanorobots has been developing very rapidly in recent years, the authors are optimistic that many new developments will appear soon in the literature and market. Researchers and manufacturers have accomplished tremendous advancements in making mechanisms and machines in nanoscale. There are robots developed recently at the size of smaller than the thickness of a human hair. These robots can rotate and move backward and forward with the application of a magnetic field. Once the robot is navigated to a precise target location, it could deliver medicine, destroy cancerous tumors, or remove plaque. There is an effort on designing and developing a nanorobot to be injected into the eye and stay there for months delivering a therapeutic to slow down or eliminate the blood vessel growth that causes a disease. In the near future, humans can imagine their bodies full of tiny robots with different diagnoses and therapeutic functions to keep their bodies healthy from the inside.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}