1. Introduction
The cone penetration test (CPT) has been widely used as a quick and reliable soil exploration test that provides subsurface soil properties [
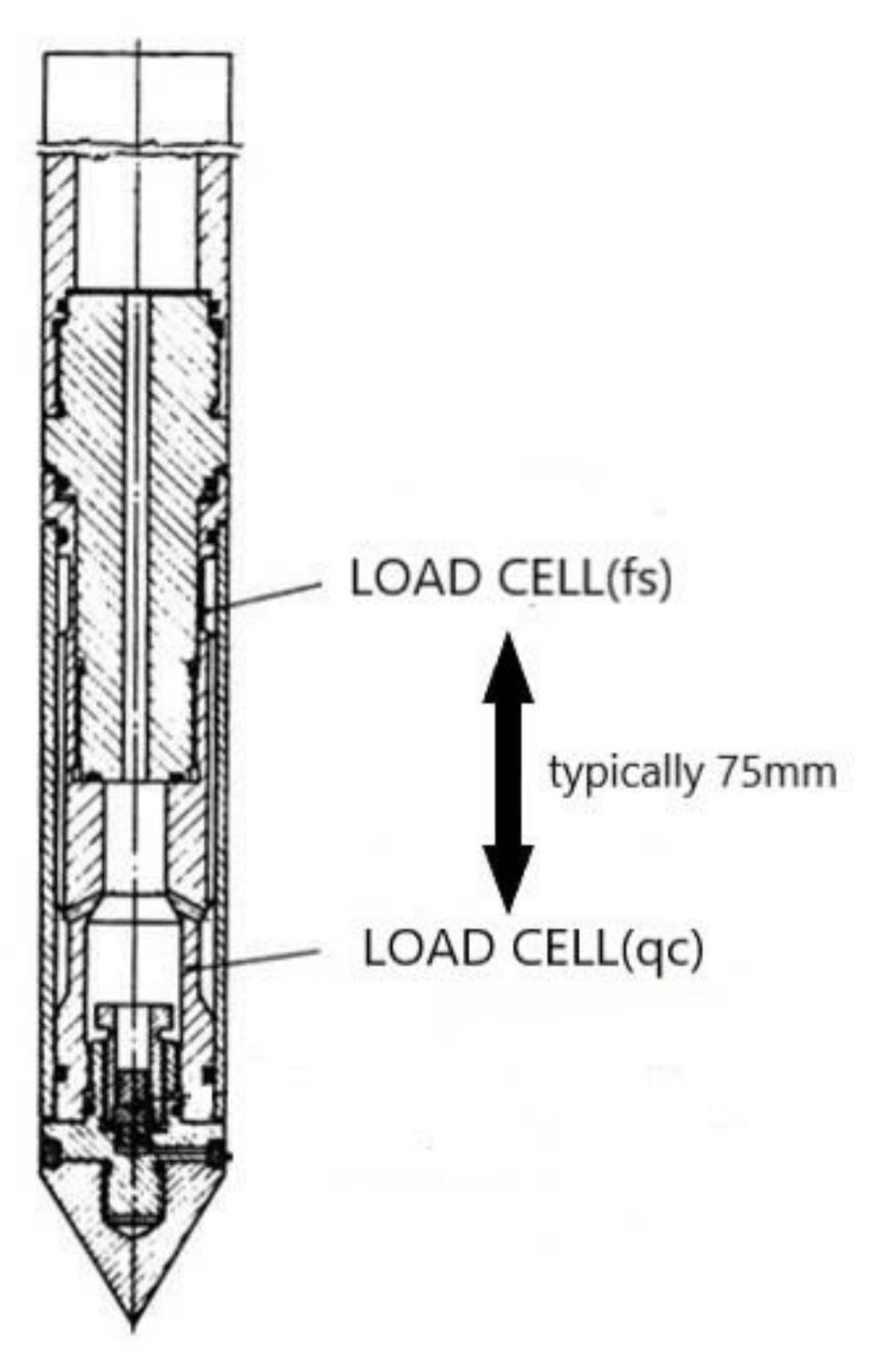
1]. As the electric cone penetrometer (
Figure 1) advances into the soil with a constant speed, parameters such as the cone tip resistance (
) and the sleeve friction (
) are simultaneously measured by the load cells on the penetrometer. Compared with other in situ tests, CPT can provide continuous parameter profiles that can yield much more detailed information [
2]. As the two major measured parameters
and
vary significantly with the change of the soil layers, CPT shows advantages in geotechnical investigations to classify soil strata, and several methods have been proposed to classify soils upon CPT data [
3,
4,
5]. Moreover, CPT can also be used to estimate the strength and deformation characteristics of soils, such as the undrained shear strength of soil
[
6]. Generally speaking, CPT is only conducted at necessary locations to obtain the required soil properties, for example, around the underground structure to be constructed. Considering the spatial variability of the soil, the CPT data obtained from adjacent soundings could be quite different, which makes it difficult to estimate the soil properties at the unsampled locations. Therefore, for large areas, how to reasonably estimate the soil properties of the entire area through limited CPT data is of great importance.
Soil properties are regionalized variables; that is, within a soil layer or rock mass, samples that are close to each other indicate a stronger correlation than distant ones [
7]. Because CPT parameters directly depend on the soil properties, they are also autocorrelated. In statistics, there are two ways to consider the correlation of the data sequence with distance: one is random field theory, and the other is geostatistics. Random field theory is often used to analyze time series. Although it has been successfully applied in analyzing soil spatial variability by different researchers [
8,
9], it is mostly applied to one-dimensional situations.
Geostatistics often refers to the Kriging method, which has been widely used in the field of geographic science. Different from random field theory, the Kriging method can be applied to multi-dimensional analysis since it is an algorithm for spatial modeling and regression interpolation [
10]. It has been used by many researchers to analyze the autocorrelation of geotechnical parameters and achieved promising results [
11,
12]. However, there are only a few case studies on adopting the Kriging method to predict the soil parameters at the unsampled locations, and the data used in previous studies is often scarce, which is not enough to prove the accuracy and effectiveness of the Kriging method. Currently, there have been several studies using Markov chain and machine learning methods combined with CPT test to predict the soil parameters at the unsampled locations [
13,
14]; however, they need to meet some strong prerequisites. For example, the Markov chain method is suitable when the unsampled location and the sampled CPT boreholes are located on the same horizontal line, while the machine learning method needs to obtain the soil layer information in advance and perform extensive training to obtain a better prediction result, which is difficult to be applied into practical engineering. In this study, we used CPT parameters with small sampling intervals as the research objects to assess the performance of the Kriging method in predicting spatial soil parameters, thus avoiding data insufficiency due to excessive sample spacing. The study was further supplemented by axial bearing capacity calculation, which we used to examine the reliability of the interpolation results and the applicability of the Kriging method in solving practical engineering problems.
2. Materials and Method
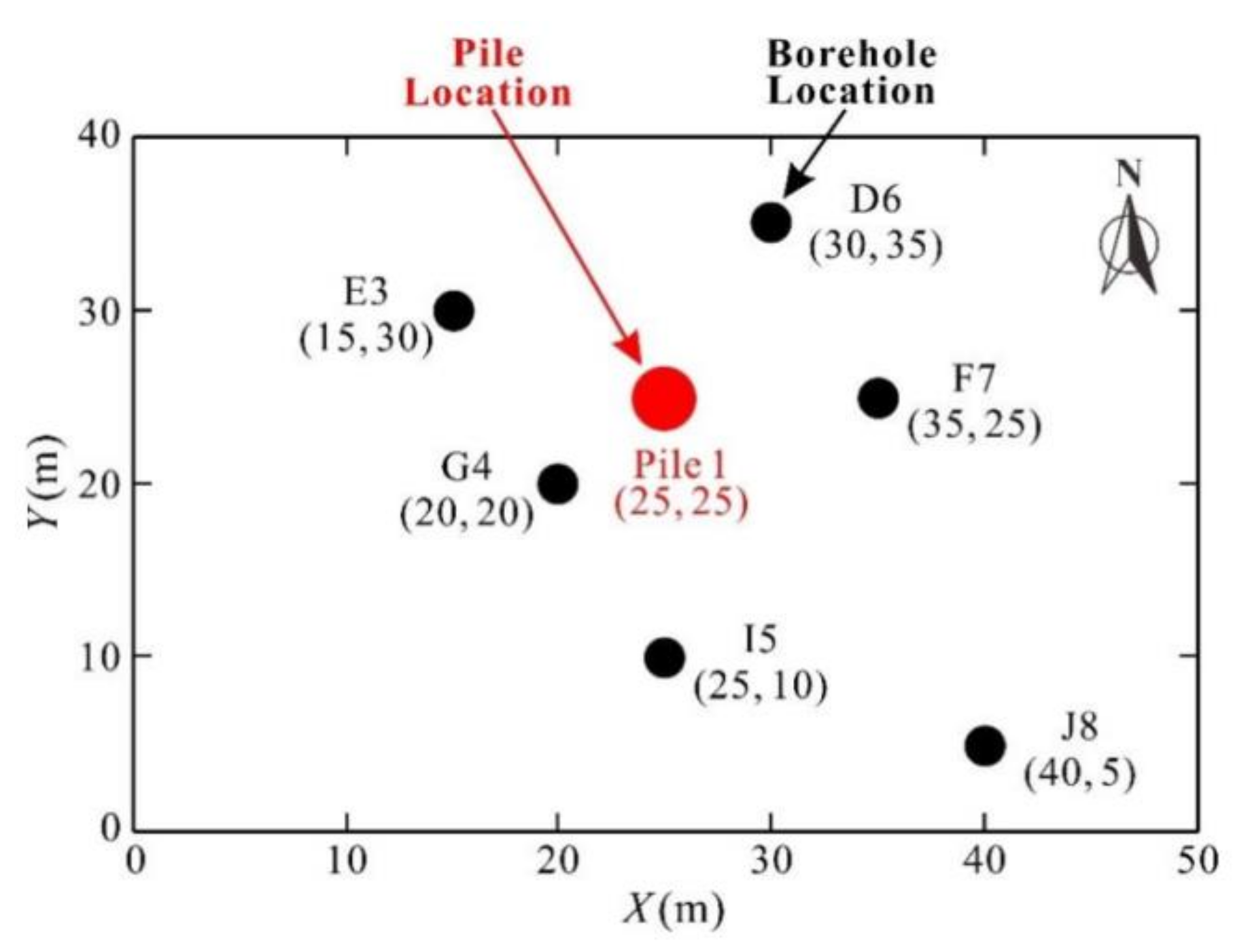
The CPT data is provided by the ISSMSG TC304 Student Contest Committee. As shown in
Figure 2, there are six numbered CPT sampled boreholes randomly distributed on this 50 × 40 m field represented by the black points. The typical drilling depth is 5 m below the mud surface, and the measurement spacing is 5 mm (i.e., a total of 1000
and
would be obtained for each borehole).
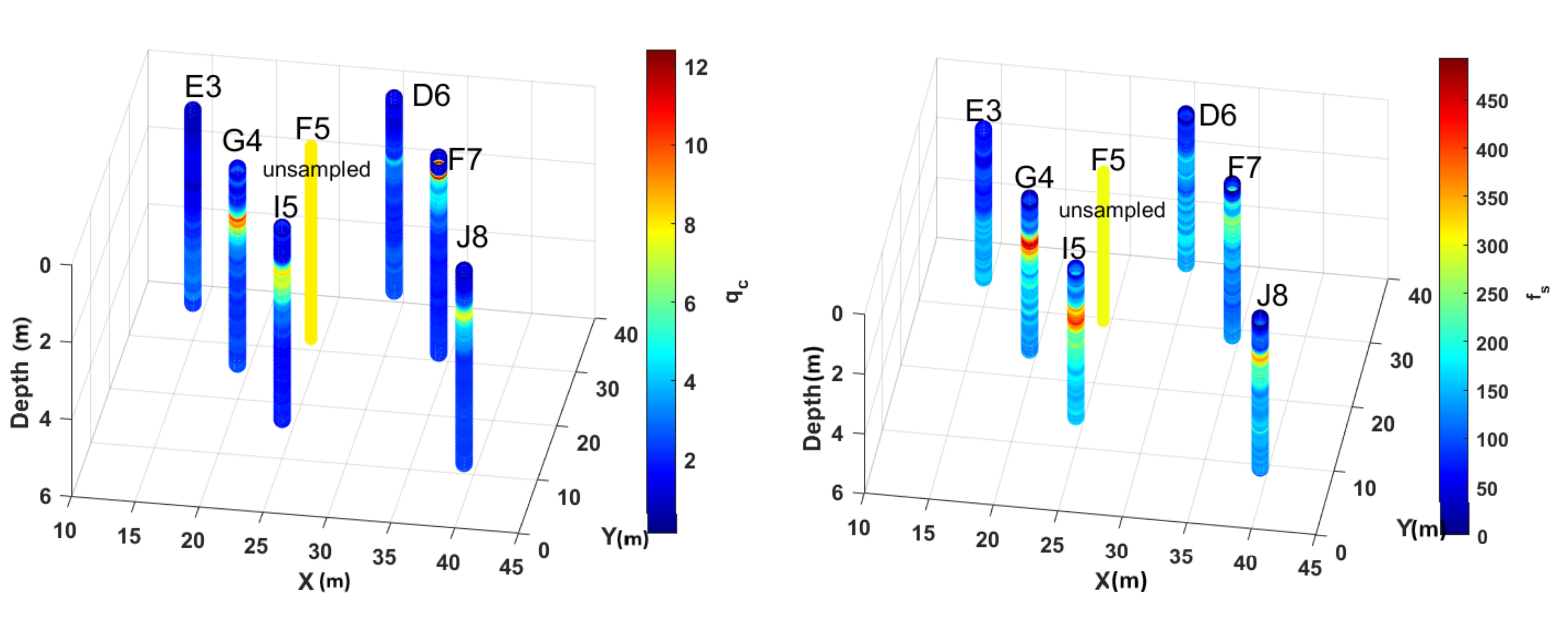
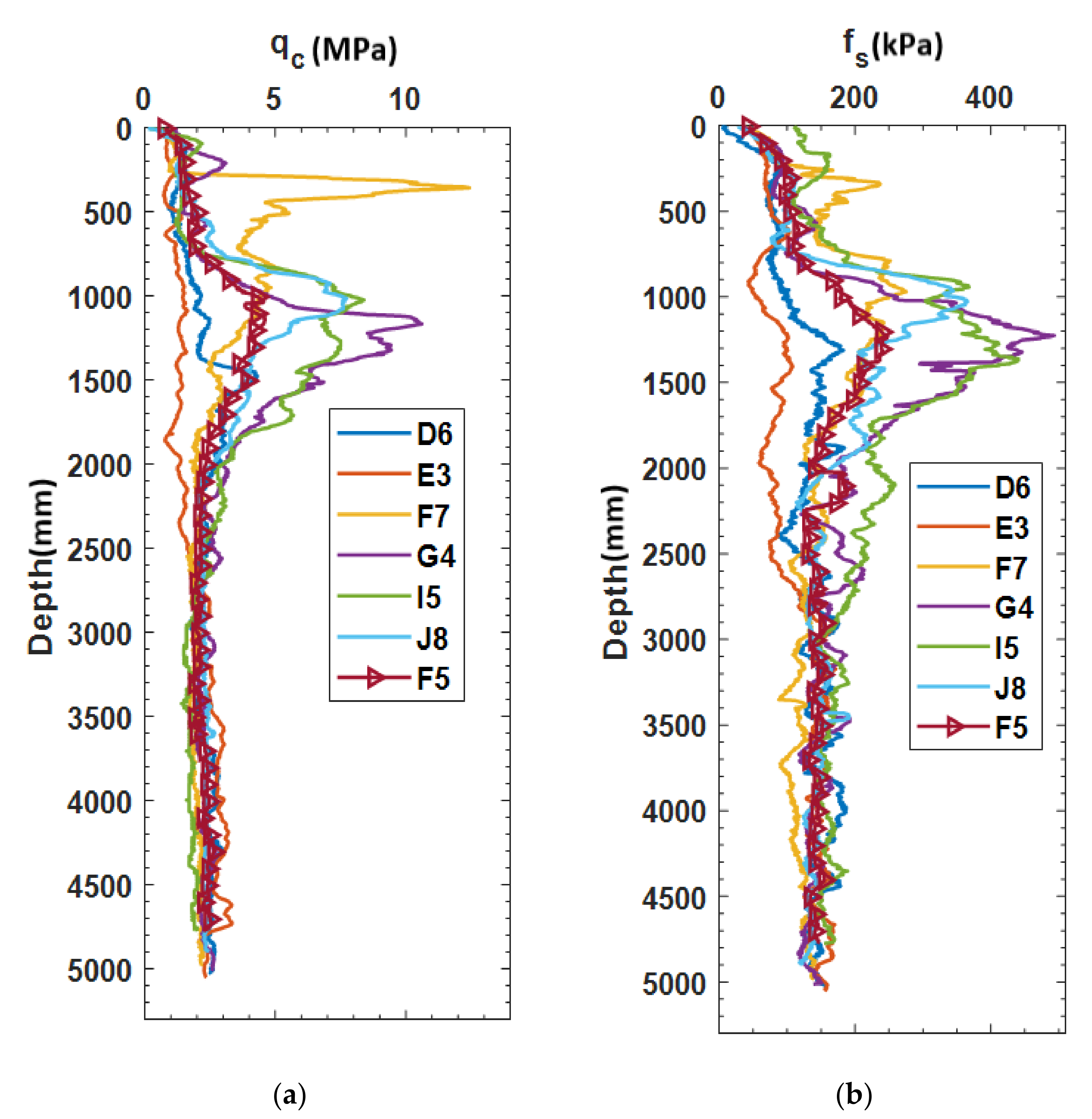
Figure 3 shows the profiles of
and
values with depth at 6 sampled positions. A precast concrete pile was driven at an unsampled location shown by the red point numbered F5. In order to figure out the soil properties and evaluate the ultimate bearing capacity of this pile foundation, the Kriging method is adopted to interpret the
and
at the pile location based upon the available CPT data. However, the raw CPT data needs preprocessing before it can be used in the Kriging interpolation program.
CPT Data Preprocessing
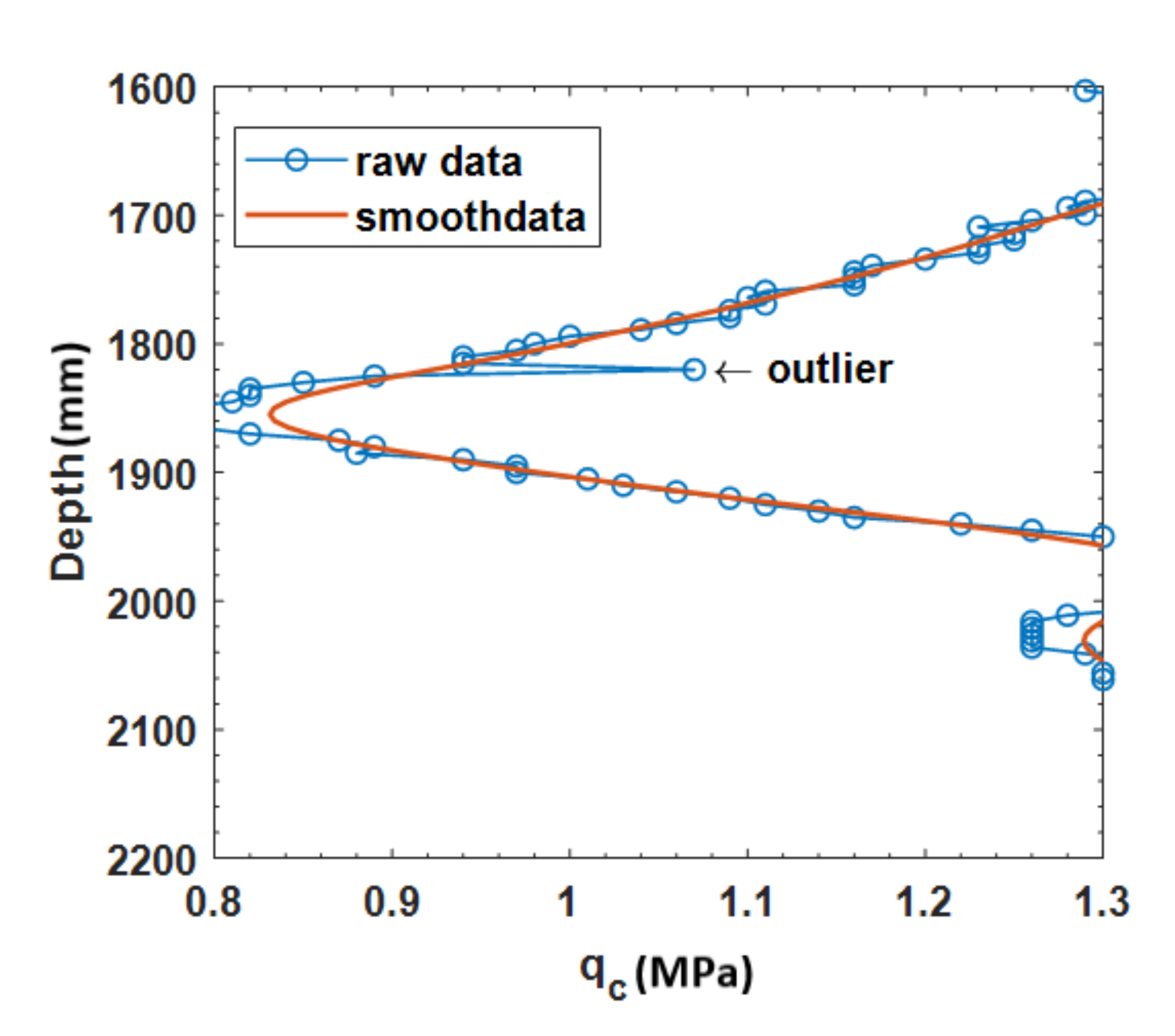
The first step is to remove outliers from the data. Outliers refer to those abnormal points whose values are obviously different from the surrounding sampled points, which is mainly caused by measurement errors or procedural errors such as rod adding [
7]. Outliers do not reflect the actual CPT characteristics of the sampled points but affect the estimation accuracy, so they need to be removed first. This process is accomplished by a Gaussian filter, which replaces the value of the abnormal point with the weighted average of 20 samples around the point. The example of outliers and the smoothed curve is shown in
Figure 4.
The second step is to shift the
data to the right place. Schmertmann [
15] emphasized that incorrect analysis will be made unless a depth correction, or shift, is applied to the
measurements. This correction is required since the cone tip resistance, and sleeve friction load cells are physically separated by a given distance as shown in
Figure 1, and hence measurements of
do not refer to the same soil as that at which measurements of
are taken. Schmertmann [
15] recommended that this shift distance should be equal to the distance between the base of the cone and the mid-height of the sleeve, which, for standard electric cone penetrometers, is approximately 75 mm. Campanella et al. [
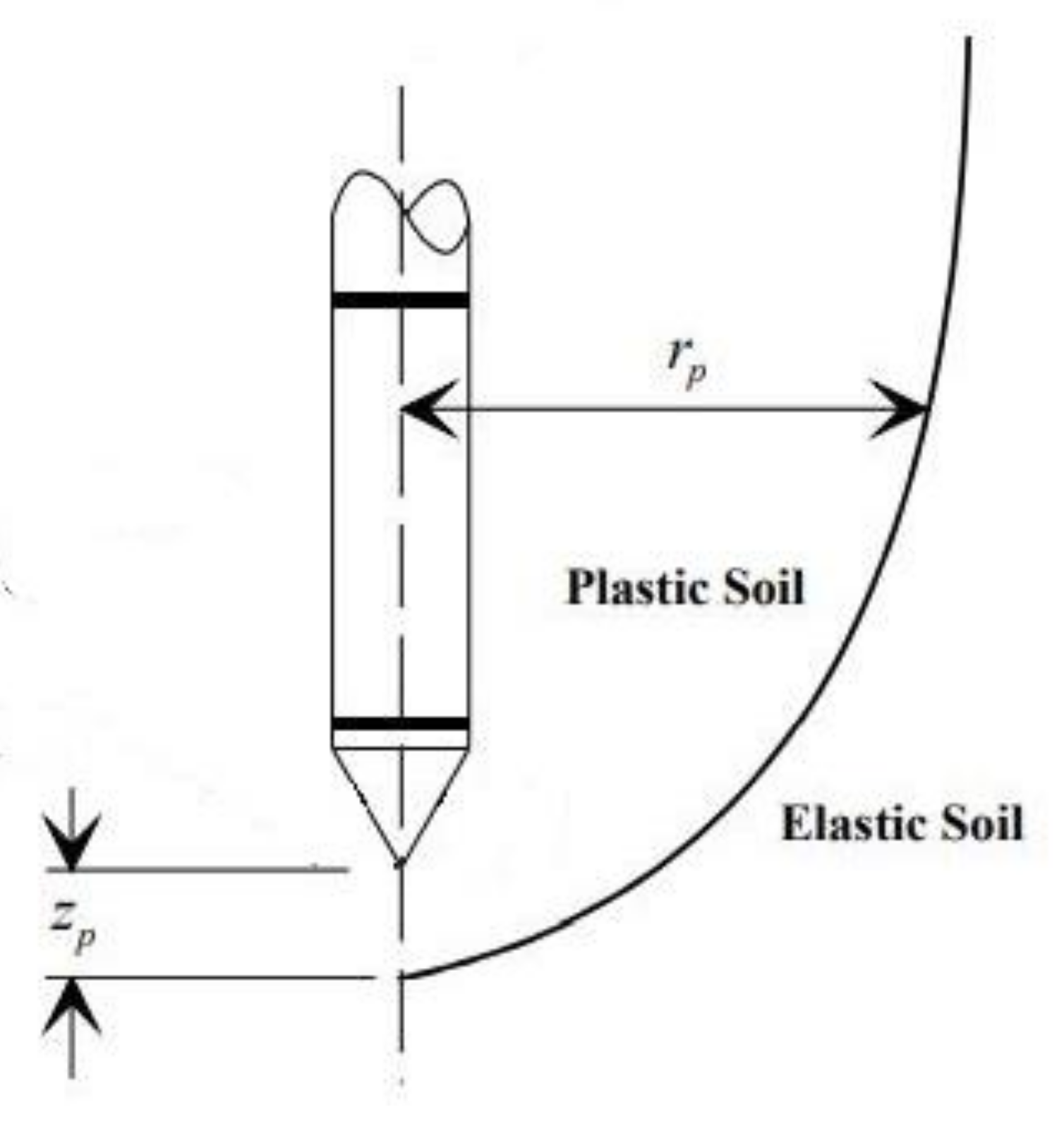
16] argued that the shift distance, also termed the “friction-bearing offset”, is 100 mm and is dependent on the type of soil being penetrated. Actually, when the cone penetrometer is advanced into the subsoil, it will cause a zone of soil to fail and deform plastically, as shown in
Figure 5. The
and
are not point values but spatially averaged values of the failure zone [
17], and the shift distance would be different for different cases. Jaksa [
7] recommended cross-correlation function (CCF) to determine the shift distance because of its superiority in demonstrating the cross-correlation between
and
.
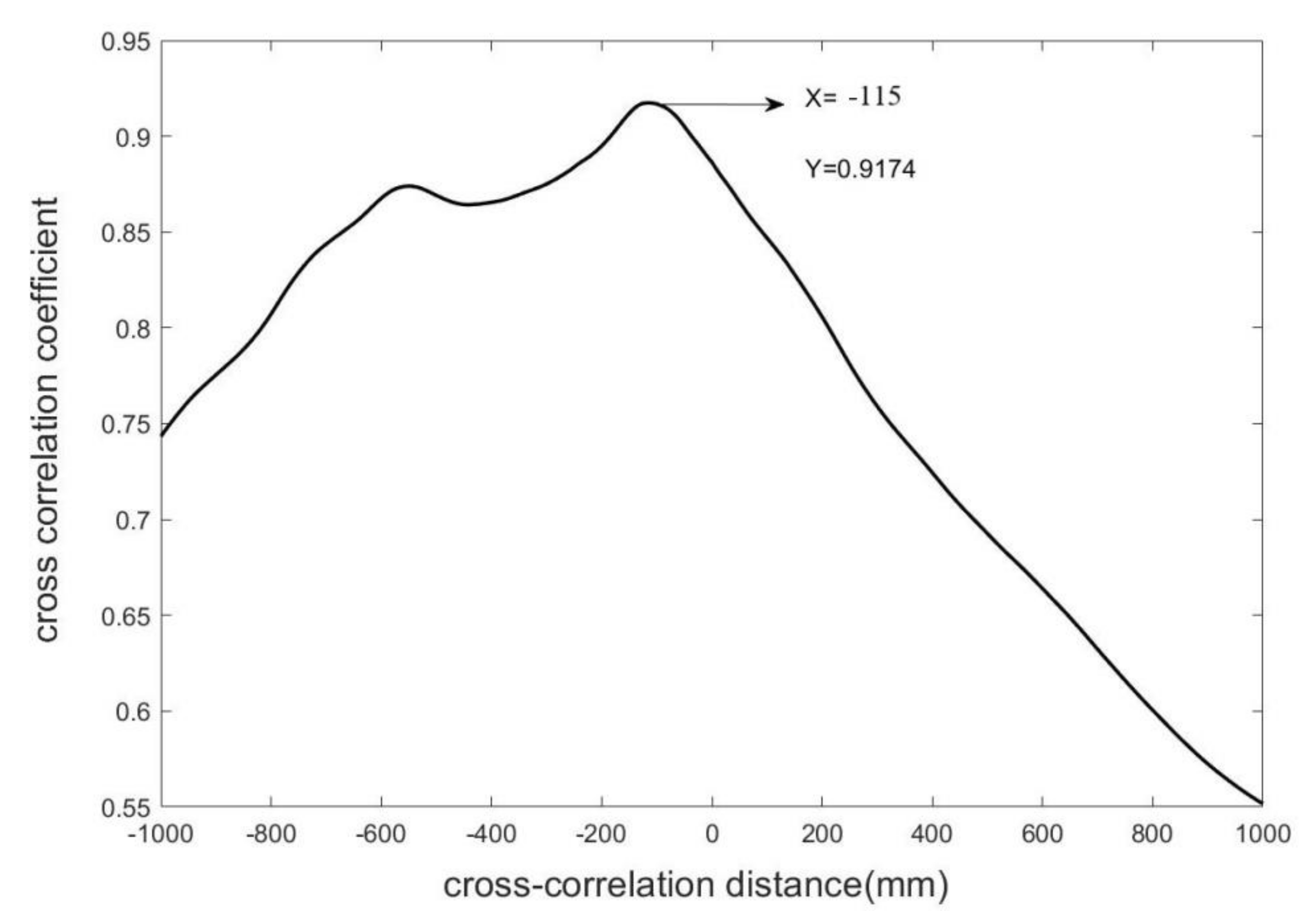
In this study, we adopted the CCF to determine the final shift distance. Taking the
and
data of borehole F7 as an example, the CCF analysis result is shown in
Figure 6. It can be seen clearly from
Figure 6 that the maximum cross-correlation coefficient occurs at a spacing of 115 mm, which implies that the optimal shift distance is 115 mm, which is higher than the actual physical spacing of 75 mm. The same process is applied to the other five boreholes, and the final shift distance results are shown in
Table 1. Based on the result listed in
Table 1, the
data of the 6 boreholes will be shifted upward, resulting in a decrease in the maximum available drilling depth of each borehole. The smallest depth is borehole I5, of which the available depth of
is reduced to 4775 mm so that in the interpolation part, the maximum interpolation depth is adjusted to 4775 mm. Meanwhile, in order to solve the problem of missing data at some depth in some boreholes, we use linear interpolation to fill in the missing values, and the details are shown in
Appendix A.
After the above preprocessing steps, we divided the soil into a total of 956 sections from the ground down every 5 mm until the depth of 4775 mm, then on each section, we estimated the CPT parameter at the unsampled location using the Kriging method.
4. Bearing Capacity Calculation
In order to examine the reliability of the Kriging interpolation results and its applicability to solve practical engineering problems, we use the interpolated CPT data of F5 to calculate the bearing capacity of a driven procast pile. The length and diameter of the pile are 4.5 and 0.3 m, respectively.
Based on previous studies, researchers held the point that the cone penetrometer can be considered as a mini-pile foundation, whereby the measured tip resistance (
) and sleeve resistance (
) correspond to the pile end bearing (
) and the component of side friction (
). So far, many CPT-based axial bearing capacity calculation methods of pile foundation have been proposed [
20]. Cai et al. [
21] evaluated and graded 10 CPT-based methods by comparing the measured capacity from static load tests with the estimated result from different pile capacity prediction methods, and the results showed that the CPT-based methods had reliability and the Laboratoire Central des Ponts et Chausees method (LCPC, Bustamante and Gianeselli) [
22] is one of the most accurate prediction methods. Another research conducted by Abu-Farsakh and Titi [
1] obtained the same result that the LCPC method was relatively better when applied to predict the ultimate bearing capacity of square precast prestressed concrete (PPC) piles driven into Louisiana soils. Moreover, Jaksa [
7] also recommended LCPC methods as the best prediction method for the soil in Adelaide.
For the LCPC method, the unit tip bearing capacity of the pile (
) is predicted from the following equation:
where
kb = 0.45 for driven precast piles in clay or silt with
values ranging from 1 to 5 MPa,
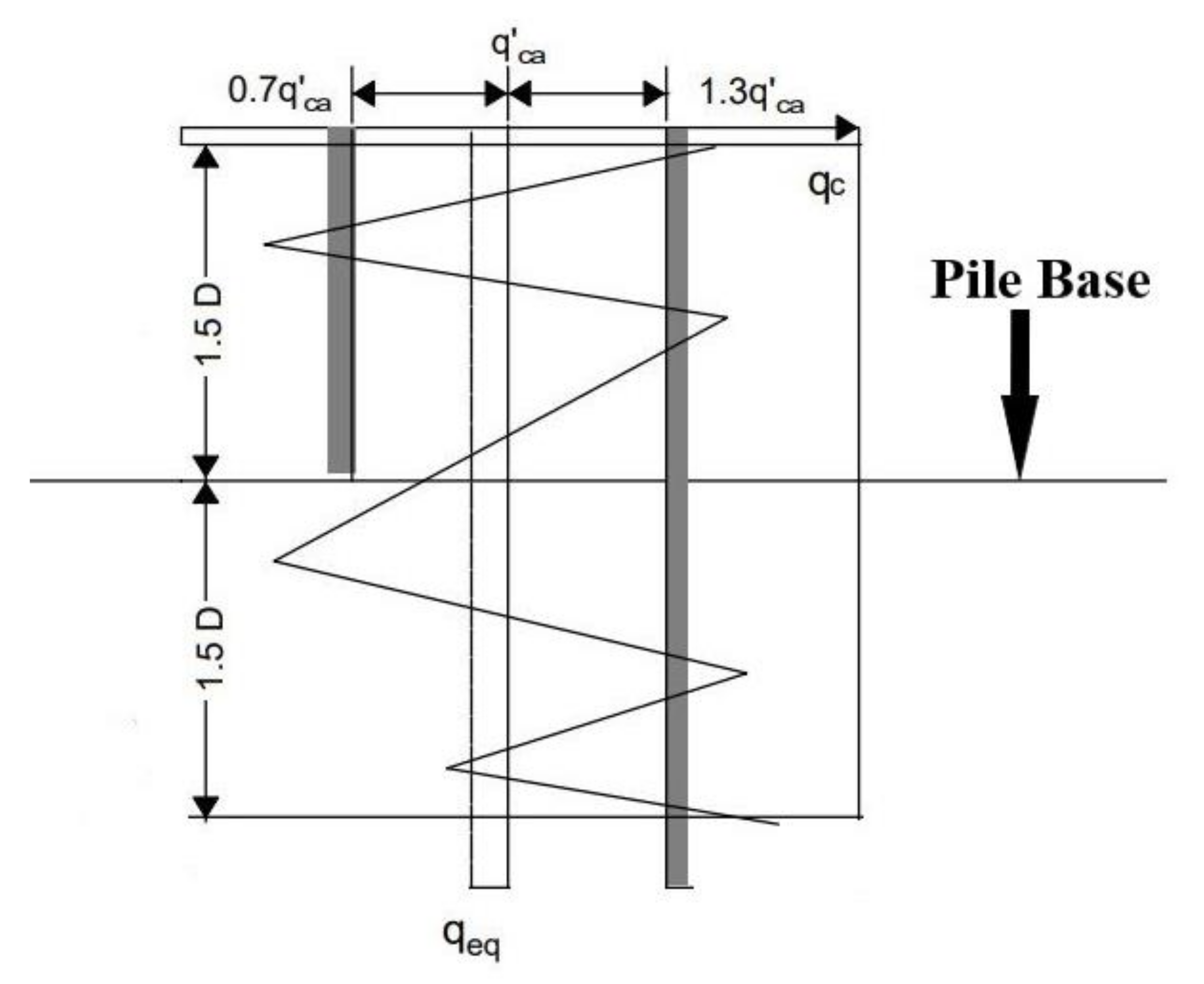
is equivalent average cone tip resistance from 1.5 D above the pile tip to 1.5 D below the pile tip as shown in
Figure 10.
Firstly, the average value
in the upper and lower 1.5 D range is determined. Then the values higher than 1.3
or lower than 0.7
are eliminated. After that, the
could be obtained by averaging the remained
values over the same zone. In this study, due to data insufficiency and stability of
values around the pile tip, as shown in
Figure 9,
is determined by averaging the
values from 1.5 D above the pile tip to the last available value, and the result of
is 1.089 MPa. Now the end bearing capacity can be determined as:
where:
Ab is the end area of the pile, and the calculation result is 77 kN.
The pile unit skin friction is estimated by:
where
ks is the skin friction coefficient ranging from 30 to 150 and equals 40 for driven procast piles in moderately compact clay (
range: 1 MPa–5 MPa). Bustamante and Gianeselli [
22] also imposed different upper limits for
depending on pile and soil typology as well as installation methods. In this case, the upper limit is 35 kPa. According to Equation (11), the
data is first transformed to
, and the data over 35 kPa is replaced with 35 kPa, then the data is used to calculate the total pile skin friction by Equation (12).
where
is the side area of the ith layer, and the
Qs is calculated to be 148 kN. Finally, Bustamante and Gianeselli [
20] suggested that the allowable design load of the pile is defined by the following equation:
Through Equation (13), the final allowable design load is 99.6 kN. Jaksa [
7] calculated the axial bearing capacity of the pile under the same condition through a 3D finite element model, of which the soil parameters came from the laboratory test on soil samples of the study area. The result given by Jaksa [
7] is 102.8 kN, which is very close to our result.
5. Discussion
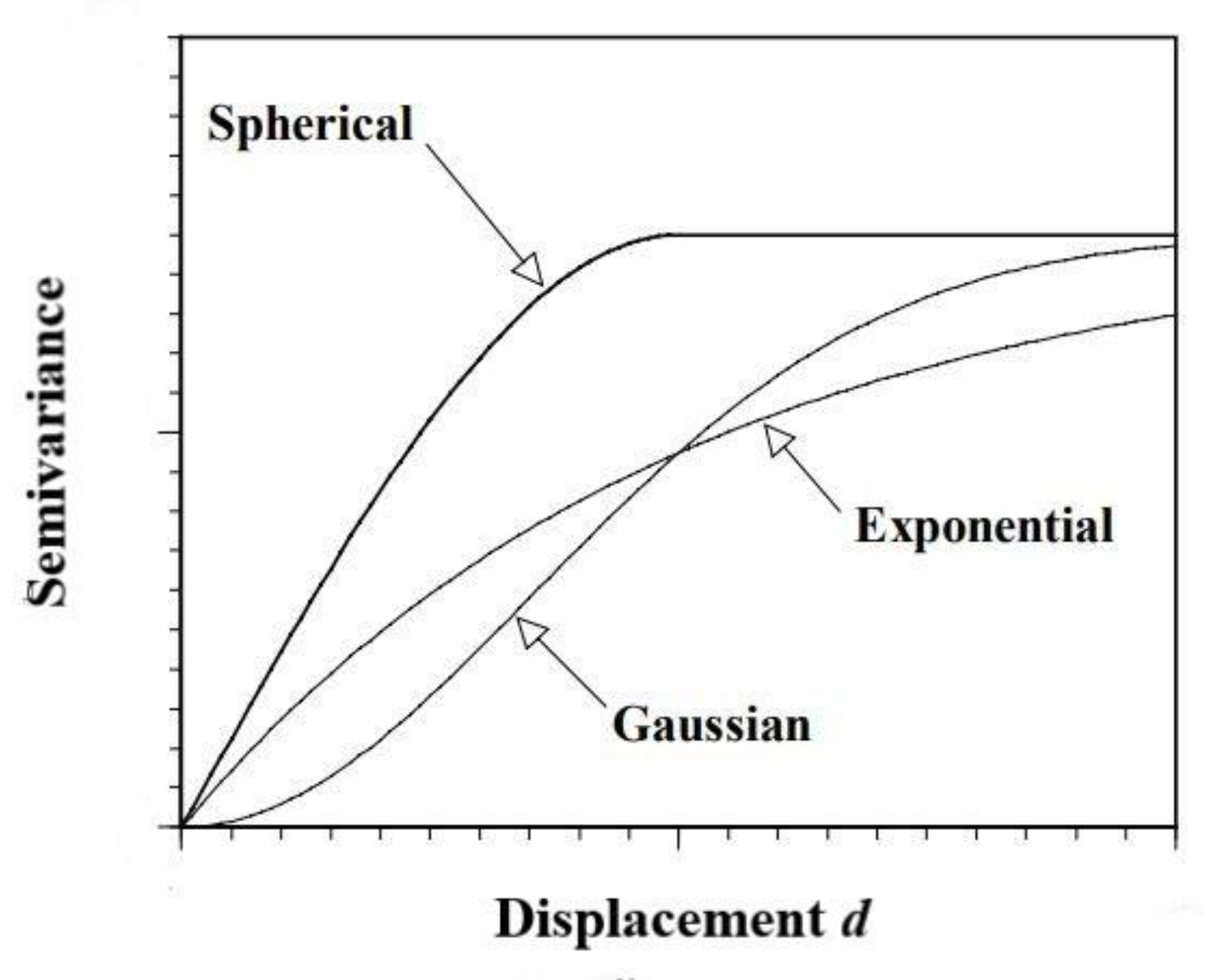
The Kriging method treats soil parameters as regionalized variables and considers the mutual influence by assigning different weights according to the semivariogram. In this study, we use the Kriging method combined with CPT data to make a reasonable estimation of the soil parameters at unsampled locations. Since CPT data is continuous and sufficient, our method can estimate parameters of locations within a certain scope and overcome the data insufficiency problem caused by relatively large sample spacings of the previous studies. As shown in
Figure 9, line
roughly reflects a similar trend as the other six sampled lines, with a fluctuation between depth 700–2000 mm for both
and
, and the data tends to keep stable under 2.5 m. The bearing capacity analysis further proved the effectiveness of the Kriging method.However, there are also some limitations for this study: The Kriging method relies on semivariograms, which need to be figured out on parameters at sampled locations. However, the number of available CPT soundings is limited, leading to instability of the result. For each cross-section, we only used six known
and
to set up the experimental semivariogram, which could not be quite accurate. More CPT tests are required for a better estimation. Due to the shift of
, the maximum interpolation depth is 4775 mm, which cannot meet the requirement of calculating depth of the LCPC methods, so the calculation may have errors. What is more, the LCPC method poses an upper limit for
, which may cause underestimation of the total bearing capacity, and the influence distance above and below the pile tip used in
calculation is different for different methods [
20]. Cai et al. [
21] suggested that the influence distance given by the original method may be improper, and further study is needed to revise it depending on the soil type.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









