
Aerodynamic Shape Optimization of NREL S809 Airfoil for Wind Turbine Blades Using Reynolds-Averaged Navier Stokes Model—Part II



Abstract
:1. Introduction
2. Mathematical Model for Aerodynamic Shape Optimization
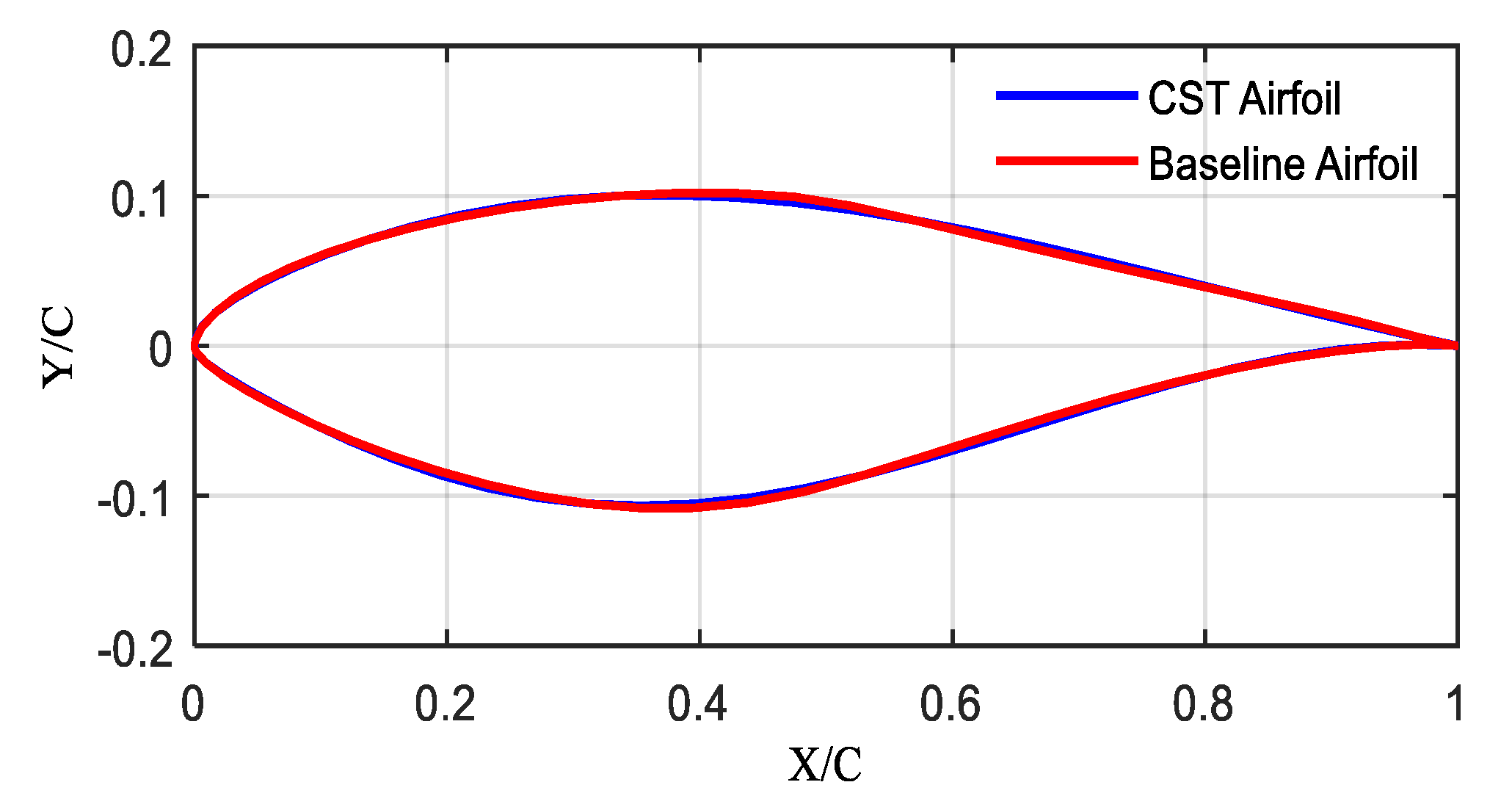
2.1. CST Parametrization
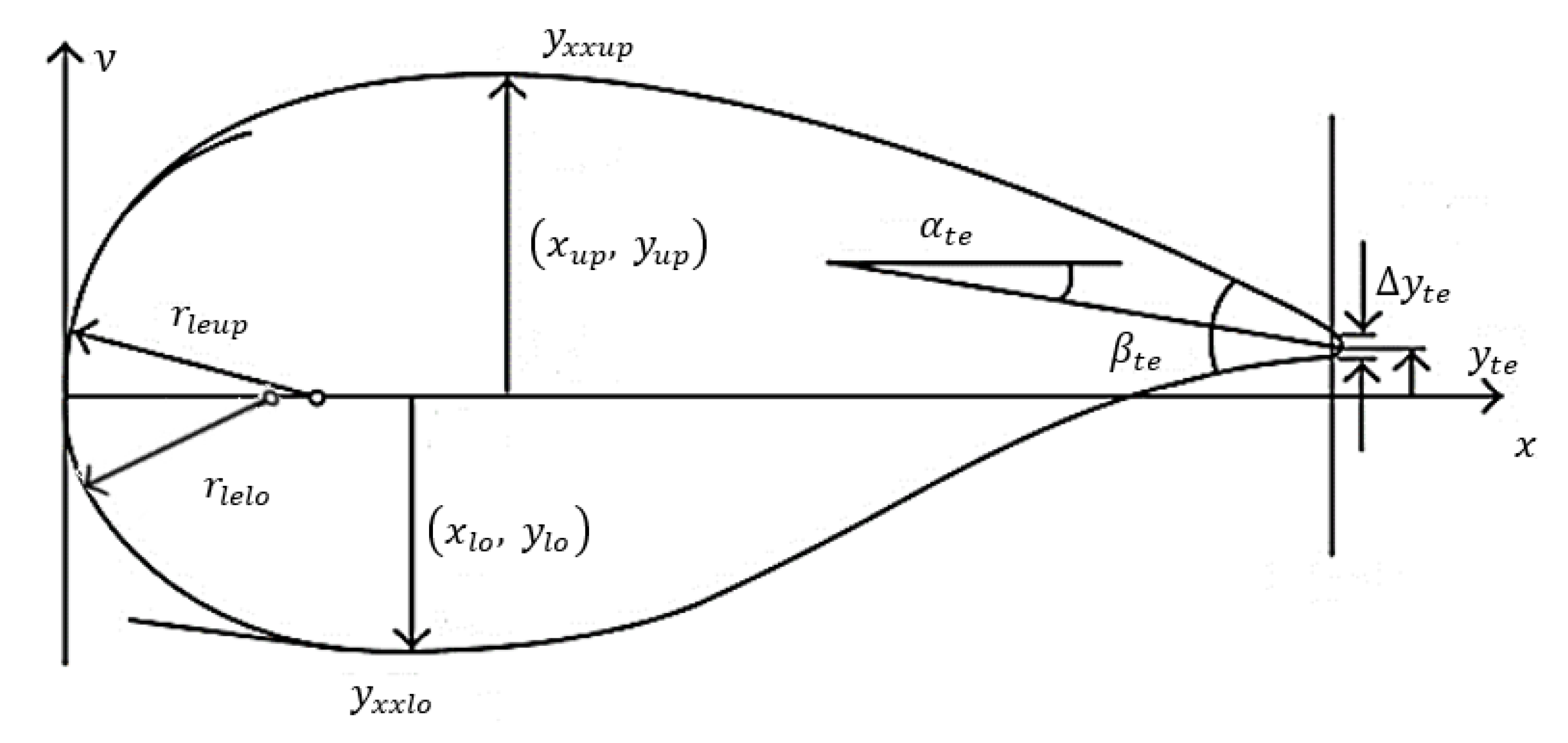
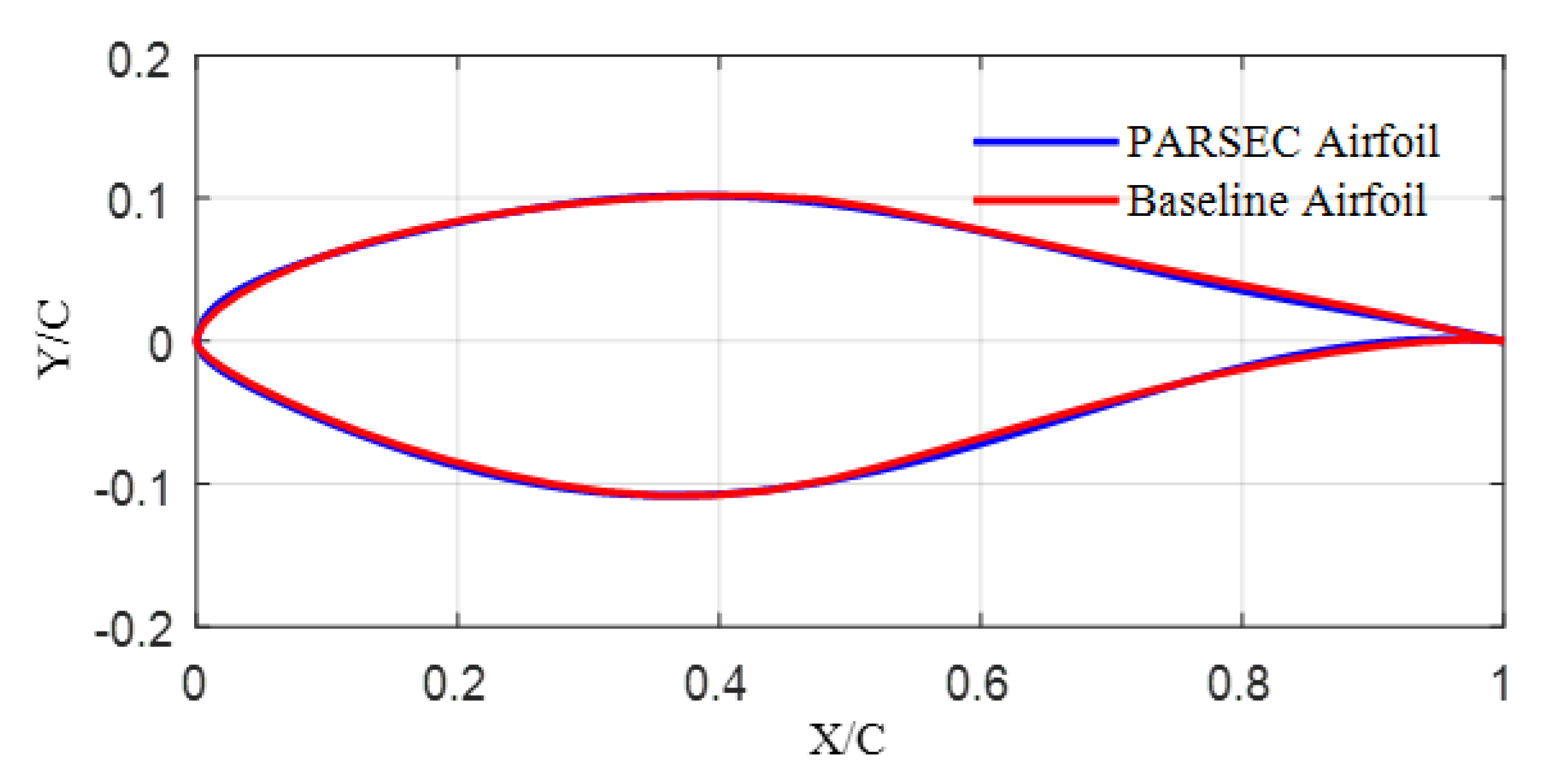
2.2. PARSEC Parametrization
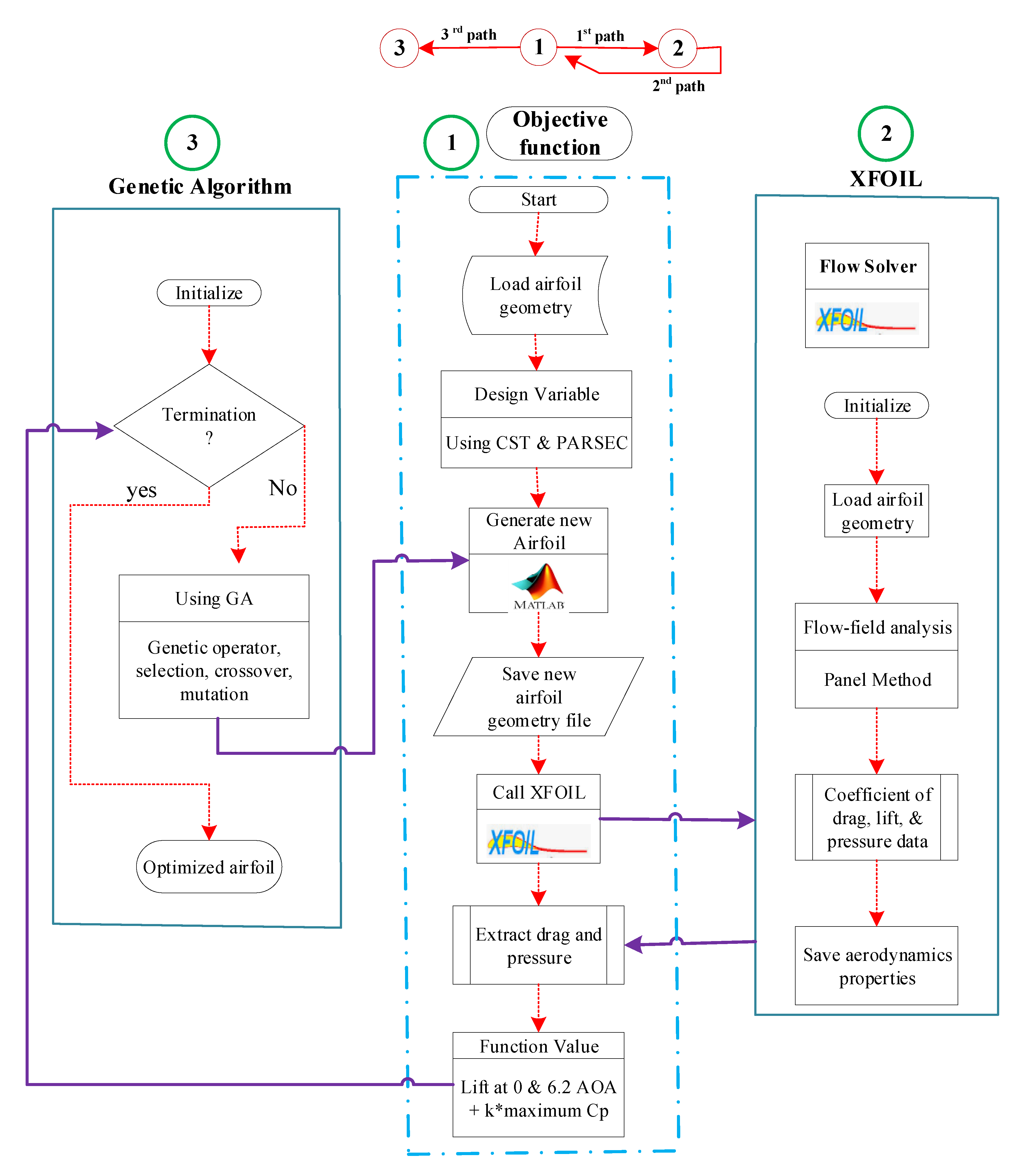
2.3. Optimization Scheme
3. Methodology
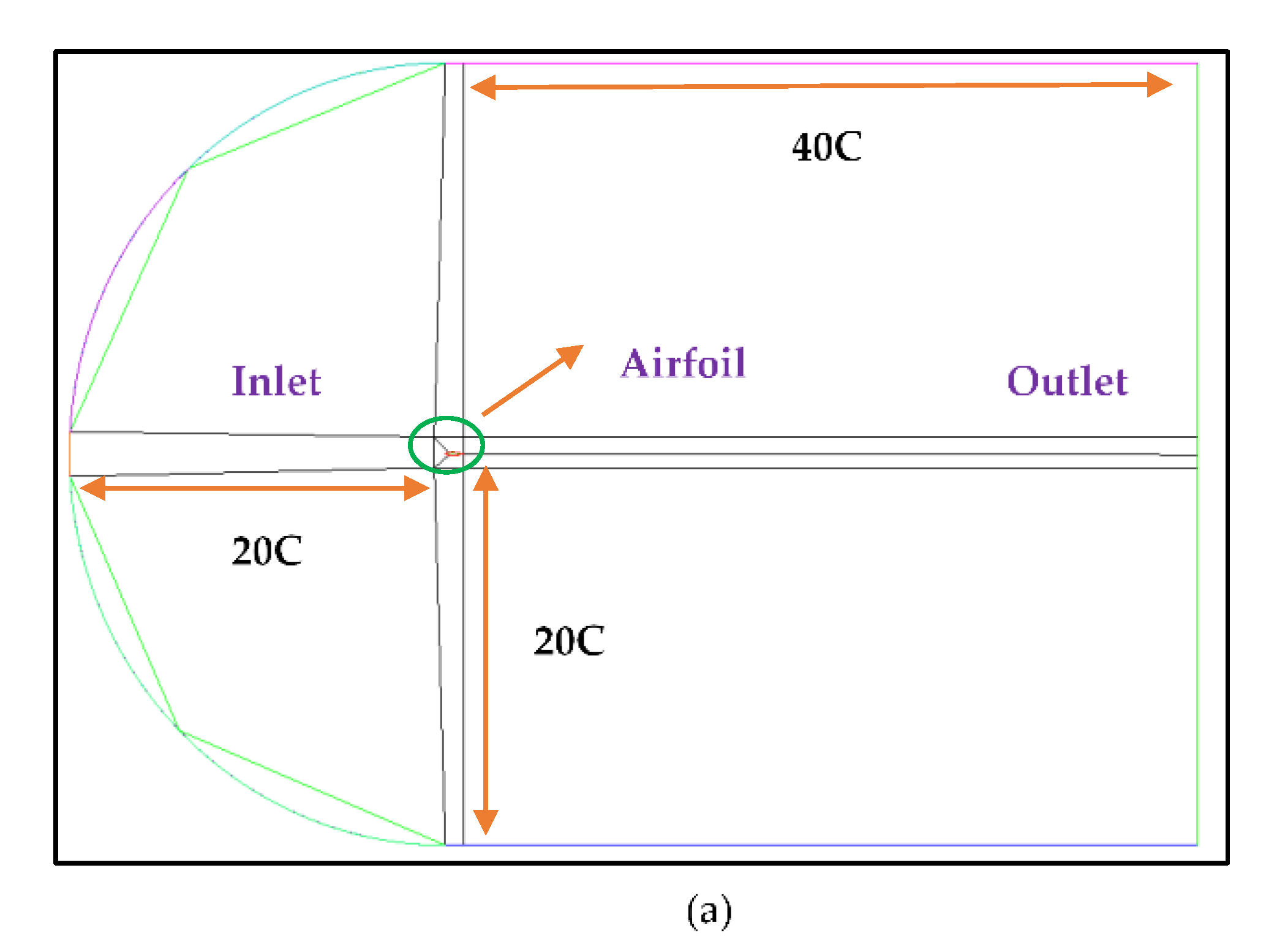
3.1. Computational Model
3.2. Computational Model
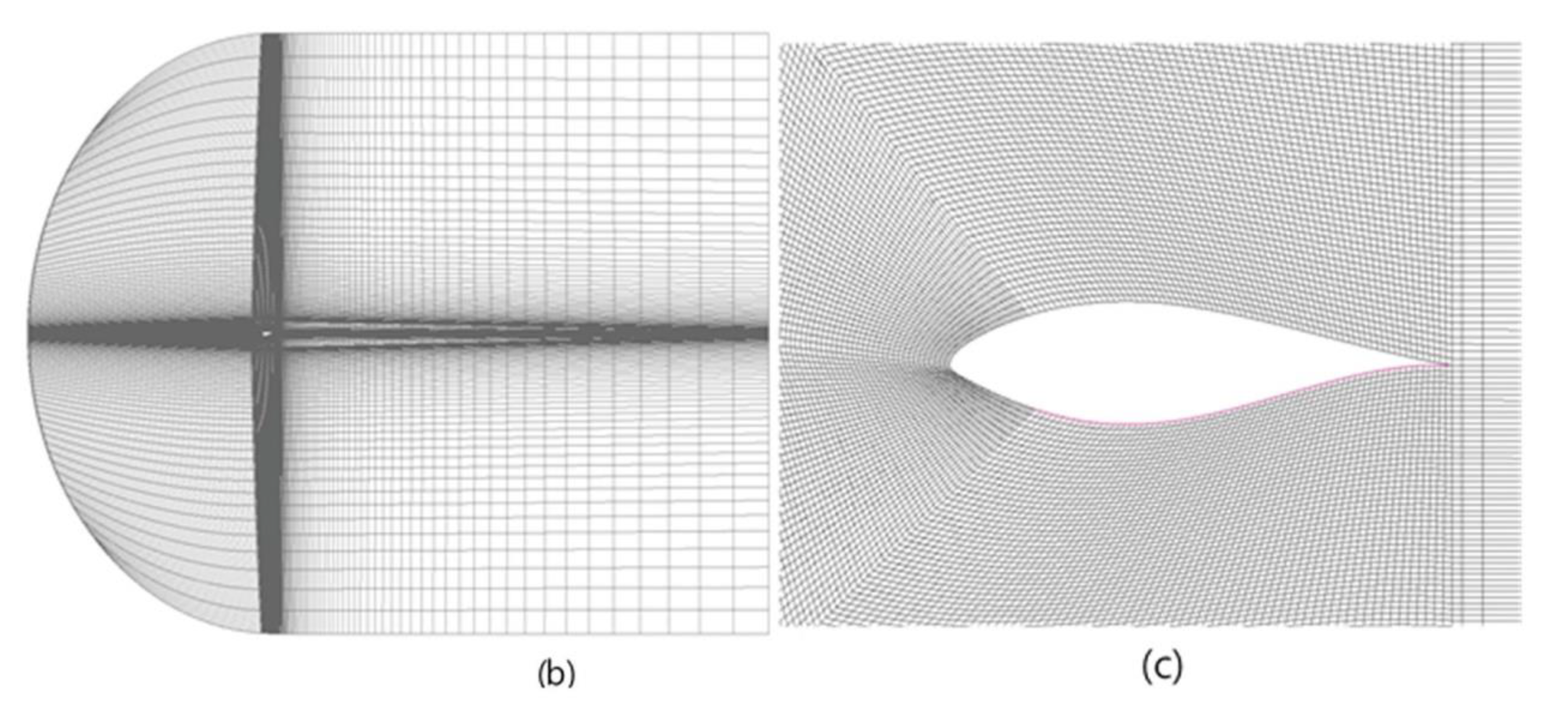
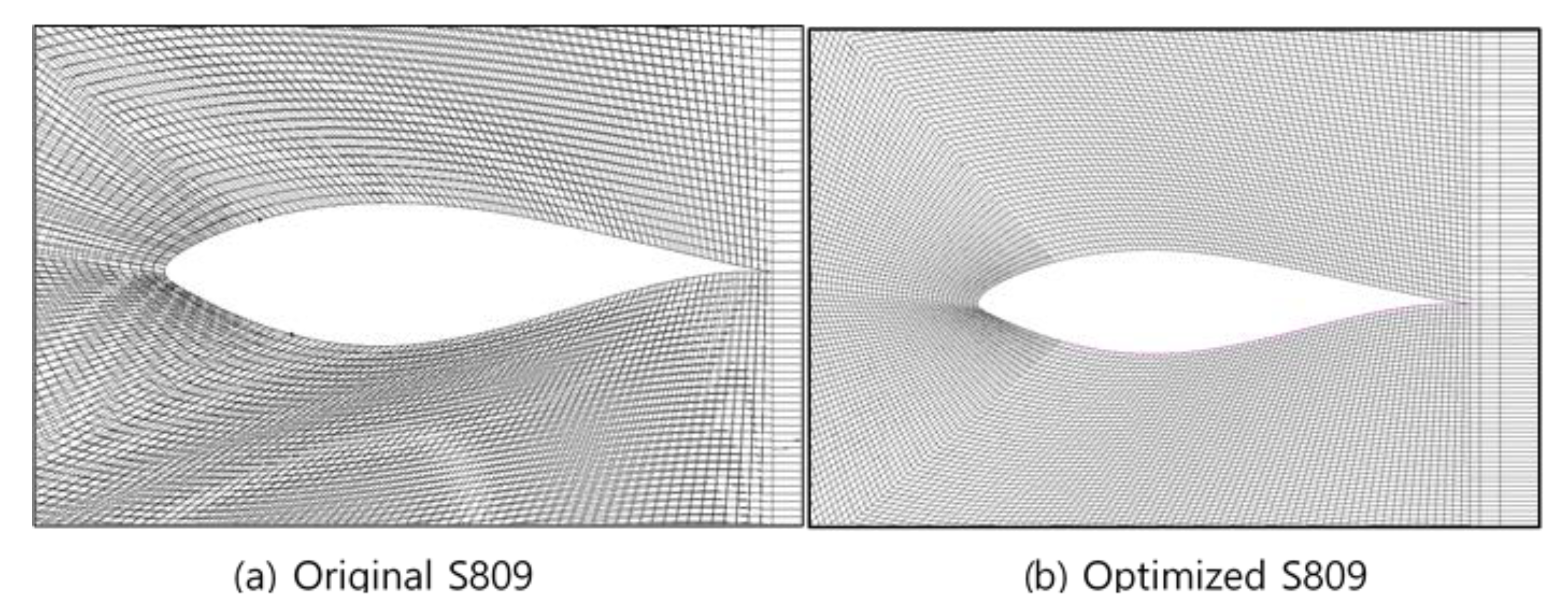
3.3. Mesh Generation
3.4. Grid Independence Study
4. Results and Discussion
4.1. Verification and Validation
4.2. Numerical Validation
5. Conclusions
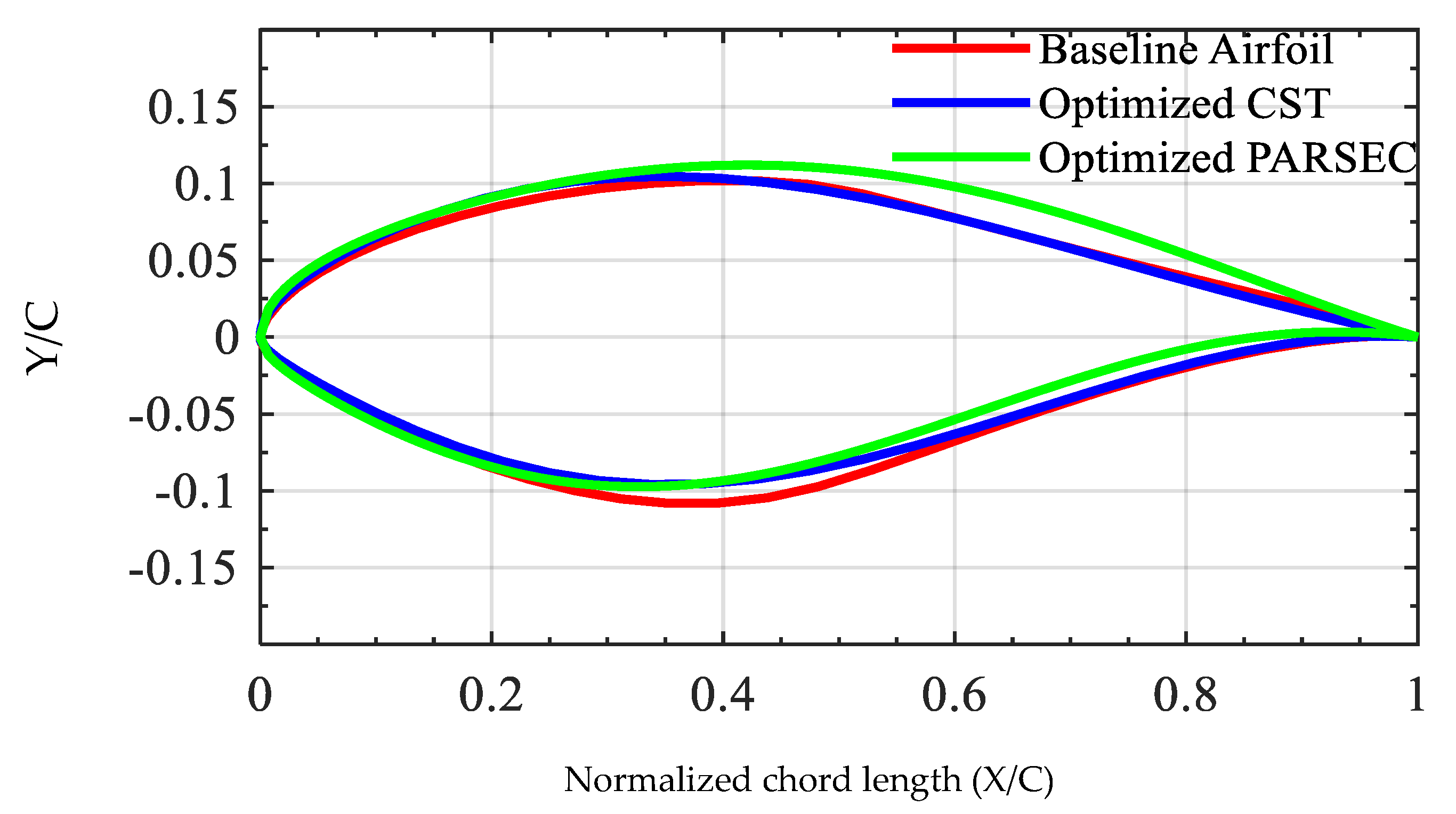
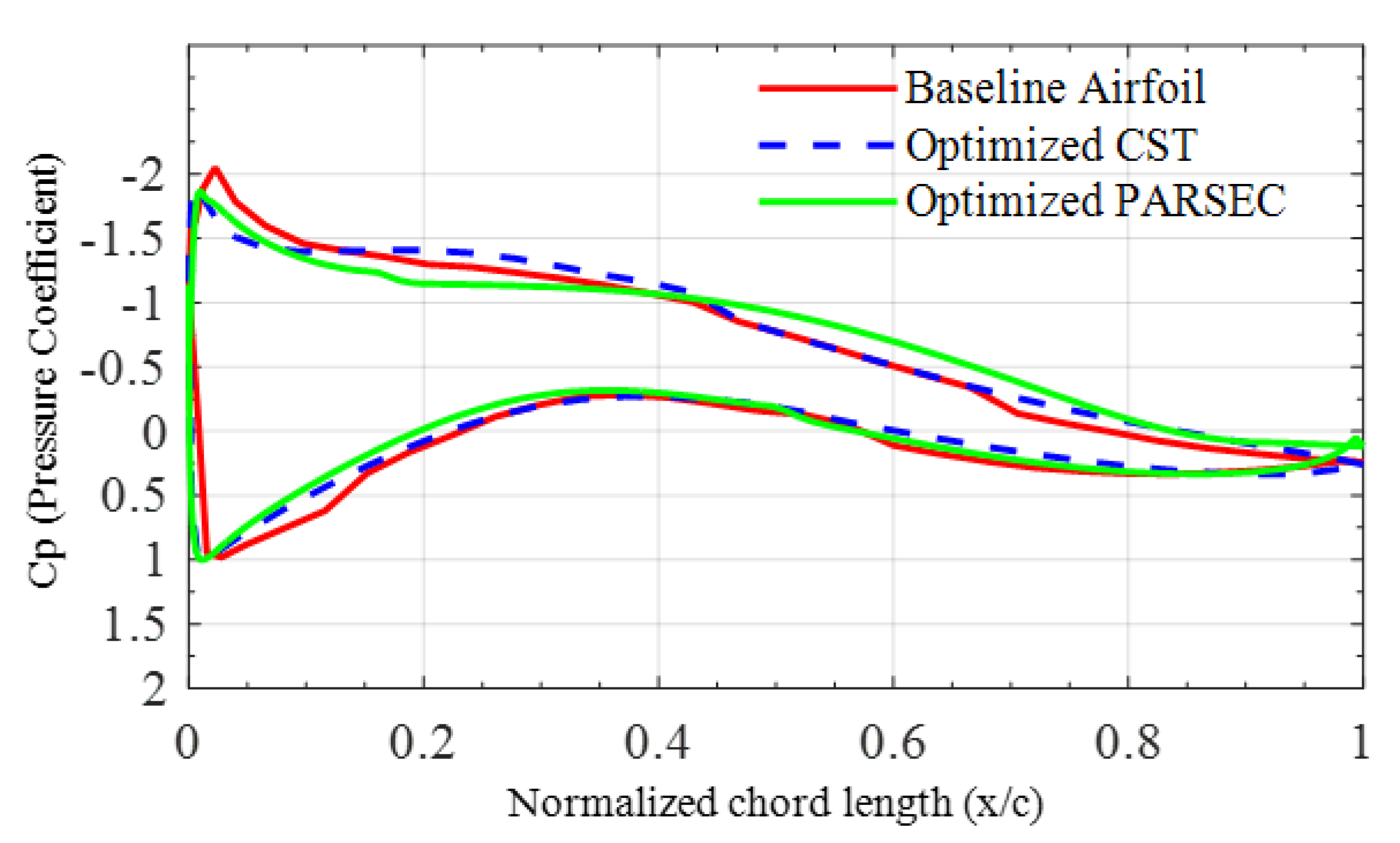
- The airfoil optimized by CST showed an increment of 11.8% in the lift coefficient and 9.6% in the lift-to-drag ratio, while with PARSEC, it showed an improvement of 10% in the coefficient of lift and decrease of 2% in the overall lift-to-drag ratio while comparing both optimized NREL S809 airfoils;
- The proposed methodology, in terms of the lift-to-drag ratio, which is the vital decisive factor in blade and wind turbine design, exhibited superior aerodynamic characteristics by 11.6% in the optimization process with CST compared with the PARSEC methodology;
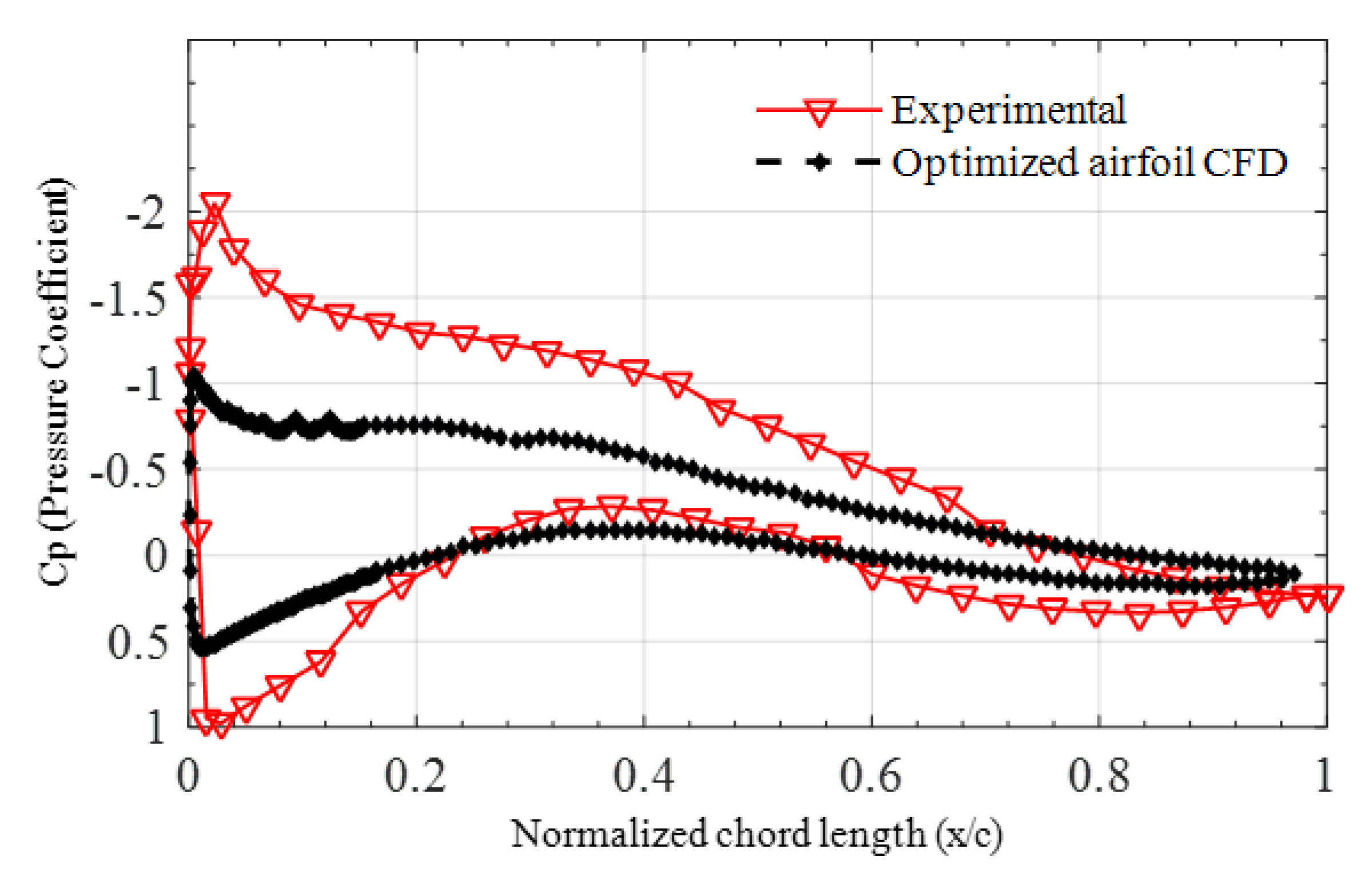
- The CFD analysis of the optimized airfoil showed an improvement of 24.6% in the lift coefficient and 12.4% in the lift-to-drag (L/D) ratio when comparing the optimized airfoil with the original S809 airfoil’s experimental results (OSU);
- The present aerodynamic optimization scheme was in close agreement with the previous results, and further application of the CST approach can be deployed with reasonable flexibility in other competitive optimization techniques;
- A significant reduction in the number of different design parameters offered a smaller number of genes for the candidate solution, which further enabled the search algorithm to act comparatively more efficiently and, in a time, -bound manner.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Aerodynamic shape optimization | |
| Class function | |
| Chord length (m) | |
| Drag coefficient | |
| Lift coefficient | |
| Pressure coefficient | |
| Class shape transformation | |
| Direct numerical optimization | |
| Direct numerical simulation | |
| Genetic algorithm | |
| Inverse design | |
| Binomial coefficient | |
| L/D | Lift-to-drag ratio |
| Ma | Mach number |
| Order of Bernstein polynomial | |
| n | Number of design variables |
| Function exponent of the first class | |
| Function exponent of the second class | |
| National Renewable Energy Laboratory | |
| Crossover probability | |
| Mutation probability | |
| PS | Population size |
| Reynolds-averaged Navier–Stokes equation | |
| Reynolds number | |
| Shape function | |
| Lower shape function | |
| Upper shape function | |
| Trailing edge thickness | |
| Greek Symbols | |
| Angle of attack | |
| Turbulence modeling constant | |
| Airfoil thickness | |
| density (kg/m3) | |
| Effective viscosity | |
| Turbulent viscosity | |
| Viscosity | |
| Boundary layer thickness | |
| Angular speed (rad/s) | |
References
- Twidell, J.; Weir, T. Renewable Energy Resources; Taylor & Francis: Oxfordshire, UK, 2005. [Google Scholar] [CrossRef]
- Ellabban, O.; Abu-rub, H.; Blaabjerg, F. Renewable energy resources: Current status, future prospects and their enabling technology. Renew. Sustain. Energy Rev. 2014, 39, 748–764. [Google Scholar] [CrossRef]
- Suman, S.; Kaleem, M.; Pathak, M. Performance enhancement of solar collectors—A review. Renew. Sustain. Energy Rev. 2015, 49, 192–210. [Google Scholar] [CrossRef] [Green Version]
- Taseska, V.; Markovska, N.; Callaway, J.M. Evaluation of climate change impacts on energy demand. Energy 2012, 48, 88–95. [Google Scholar] [CrossRef]
- Schaeffer, R.; Salem, A.; Frossard, A.; De Lucena, P.; Soares, B.; Cesar, M. Energy sector vulnerability to climate change: A review. Energy 2012, 38, 1–12. [Google Scholar] [CrossRef]
- European Commission. The Roadmap for Transforming the EU into a Competitive, Low-Carbon Economy by 2050; European Commission: Brussels, Belgium, 2011. [Google Scholar]
- United Nations Framework Convention on Climate Change; Paris Agreement: Paris, France, 2015.
- GWEC. Global Wind Report 2019; GWEC: Brussels, Belgium, 2019. [Google Scholar]
- Shahrokhi, A.; Jahangirian, A. Airfoil shape parameterization for optimum Navier–Stokes design with genetic algorithm. Aerosp. Sci. Technol. 2007, 11, 443–450. [Google Scholar] [CrossRef]
- Zhu, W.J.; Shen, W.Z.; Sørensen, J.N. Integrated airfoil and blade design method for large wind turbines. Renew. Energy 2014, 70, 172–183. [Google Scholar] [CrossRef] [Green Version]
- Song, W.; Keane, A. A Study of Shape Parameterisation Methods for Airfoil Optimisation. In Proceedings of the 10th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, Albany, NY, USA, 30 August–1 September 2004; pp. 1–8. [Google Scholar]
- Orman, E.; Durmus, G. Comparison of shape optimization techniques coupled with genetic algorithm for a wind turbine airfoil. In Proceedings of the 2016 IEEE Aerospace Conference, Big Sky, MT, USA, 5–12 March 2016; pp. 1–7. [Google Scholar]
- Khurana, M.S.; Winarto, H.; Sinha, A.K. Airfoil Geometry Parameterization through Shape Optimizer and Computational Fluid Dynamics. In Proceedings of the 46th AIAA Aerospace Sciences Meeting and Exhibit, Reno, Nevada, 7–10 January 2008; p. 295. [Google Scholar]
- Sripawadkul, V.; Padulo, M.; Guenov, M. A Comparison of Airfoil Shape Parameterization Techniques for Early Design Optimization. In Proceedings of the 13th AIAA/ISSMO Multidisciplinary Analysis Optimization Conference, Fort Worth, TX, USA, 13–15 September 2010; pp. 1–9. [Google Scholar]
- Kulfan, B.M. Universal Parametric Geometry Representation Method-CST. J. Aircr. 2008, 45, 142–158. [Google Scholar] [CrossRef]
- Kulfan, B.; Bussoletti, J. “Fundamental” Parametric Geometry Representations for Aircraft Component Shapes. In Proceedings of the 11th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, Portsmouth, Virginia, 6–8 September 2006. [Google Scholar]
- Hicks, R.M.; Henne, P.A. Wing Design by Numerical Optimization. J. Aircr. 1978, 15, 407–412. [Google Scholar] [CrossRef]
- Yang, F.; Yue, Z.; Li, L.; Yang, W. Aerodynamic optimization method based on Bezier curve and radial basis function. Proc. Inst. Mech Eng. Part G J. Aerosp. Eng. 2018, 232, 459–471. [Google Scholar] [CrossRef]
- Wu, X.; Zhang, W.; Peng, X.; Wang, Z. Benchmark aerodynamic shape optimization with the POD-based CST airfoil parametric method. Aerosp. Sci. Technol. 2019, 84, 632–640. [Google Scholar] [CrossRef]
- Palar, P.S. Multi-Objective Optimization of Transonic Airfoil Using CST Methodology with General and Evolved Supercritical Class Function. In Proceedings of the 29th Congress of the International Council of the Aeronautical Sciences, St. Peterburg, Russia, 7–12 September 2014; pp. 1–12. [Google Scholar]
- Aerodynamics, A.; Sobieczky, H. Geometry Generator for CFD and Applied Aerodynamics. In New Design Concepts for High Speed Air Transport; Springer: Vienna, Austria, 1997; pp. 137–158. [Google Scholar]
- Lane, K.; Marshall, D. A Surface Parameterization Method for Airfoil Optimization and High Lift 2D Geometries Utilizing the CST Methodology. In Proceedings of the 47th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 5–8 January 2009. [Google Scholar]
- Somers, D.M. Design and Experimental Results for the S809Airfoil; National Renewable Energy Lab.: Golden, CO, USA, 1997. [Google Scholar]
- Giguère, P.; Selig, M.S. Design of a Tapered and Twisted Blade for the NREL Combined Experiment Rotor; National Renewable Energy Lab.: Golden, CO, USA, 1999. [Google Scholar]
- Ritlop, R.M. Toward the Aerodynamic Shape Optimization of Wind Turbine Profiles. Ph.D. Thesis, McGill University, Montreal, QC, Canada, 2009. [Google Scholar]
- Simms, D.; Schreck, S.; Hand, M.; Fingersh, L.J. NREL Unsteady Aerodynamics Experiment in the NASA-Ames Wind Tunnel: A Comparison of Predictions to Measurements; National Renewable Energy Lab.: Golden, CO, USA, 2001. [Google Scholar]
- Menter, F.R. Zonal two equation kw turbulence models for aerodynamic flows. In Proceedings of the 23rd Fluid Dynamics, Plasmadynamics, and Lasers Conference, Orlando, FL, USA, 6–9 July 1993. [Google Scholar]
- Saleem, A.; Kim, M.-H. Aerodynamic analysis of an airborne wind turbine with three different aerofoil-based buoyant shells using steady RANS simulations. Energy Convers Manag. 2018, 177, 233–248. [Google Scholar] [CrossRef]
- Holland, J.H. Adaptation in Natural and Artificial Systems; MIT Press: Cambridge, MA, USA, 1975; Volume 18. [Google Scholar]
- Goldberg, D.E.; David, E. Goldberg-Genetic Algorithms in Search, Optimization, and Machine Learning-Addison-Wesley Professional; Addison-Wesley: Boston, MA, USA, 1989; p. 432. [Google Scholar]
- Chawdhry, P.K.; Roy, R.; Pant, R.K. Soft Computing in Engineering Design and Manufacturing; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Saleem, A.; Kim, M.-H. Performance of buoyant shell horizontal axis wind turbine under fluctuating yaw angles. Energy 2019, 169, 79–91. [Google Scholar] [CrossRef]
- Saeed, M.; Kim, M.-H. Airborne wind turbine shell behavior prediction under various wind conditions using strongly coupled fluid-structure interaction formulation. Energy Convers Manag. 2016, 120, 217–228. [Google Scholar] [CrossRef]
- Saleem, A.; Kim, M.-H. Effect of rotor tip clearance on the aerodynamic performance of an aerofoil-based ducted wind turbine. Energy Convers Manag. 2019, 201, 112186. [Google Scholar] [CrossRef]
- Saeed, M.; Kim, M.-H. Aerodynamic performance analysis of an airborne wind turbine system with the NREL Phase IV rotor. Energy Convers Manag. 2017, 134, 278–289. [Google Scholar] [CrossRef]
- ANSYS 16, ANSYS-CFX User Manual n.d.; ANSYS: Canonsburg, PA, USA, 2016.
- Hand, M.M.; Simms, D.A.; Fingersh, L.J.; Jager, D.W.; Cotrell, J.R.; Schreck, S.; Larwood, S.M. Unsteady Aerodynamics Experiment Phase VI: Wind Tunnel Test Configurations and Available Data Campaigns; National Renewable Energy Lab.: Golden, CO, USA, 2001. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PARSEC Parameter | Geometric Parameter | Definition |
|---|---|---|
| Upper leading edge radius | ||
| Lower leading edge radius | ||
| Upper crest position in horizontal coordinates | ||
| Upper crest position in vertical coordinates | ||
| Upper crest curvature | ||
| Lower crest position in horizontal coordinates | ||
| Lower crest position in vertical coordinates | ||
| Lower crest curvature | ||
| Trailing edge offset in a vertical sense | ||
| Trailing edge thickness | ||
| Trailing edge direction | ||
| Trailing edge wedge angle |
| Geometric Constraints | Trailing edge offset in a vertical sense and trailing edge thickness are kept zero |
| Aerodynamic Constraints | Lift coefficient should be greater than the original airfoil Wind angle of attack = and |
| Objective | Maximize lift coefficient () and lift-to-drag ratio (L/D) |
| Termination Criteria | No change in maximum fitness value for 20 generations |
| Boundary Condition | Velocity of Flow (u) | Mach Number (M) | Reynolds Number (Re) | Angle of Attack (°) | Dynamic Viscosity (μ) | Density ρ | Chord Length (c) | Temperature (T) | Gas Constant (R) | Working Fluid | Pressure (P) |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Units | |||||||||||
| NREL S809 | 7 | 0.02 | 0 & 6.2 | 1.258 | 0.34 | 288 | 287 | Air |
| Mesh | Nodes along the Upward Direction | Nodes in Front of the Leading Edge | Nodes along the Downward Direction | Nodes along the Airfoil Length | Face Diagonal Nodes | Nodes along the Trailing Edge | Nodes along the Leading Edge | Maximum Value of y+ | Coefficient of Drag (Cd) | Coefficient of Lift (Cl) | Total Number of Nodes (Millions) | Memory Allocated by the Solver | CPU Time for 10 Iterations |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| M-i | [MB] | [s] | |||||||||||
| M1 | 125 | 75 | 125 | 75 | 75 | 250 | 150 | 0.7 | 0.0174 | 0.963 | 3.6 | 595 | 68 |
| M2 | 125 | 100 | 125 | 75 | 100 | 300 | 200 | 0.7 | 0.0156 | 0.973 | 4.9 | 796 | 95 |
| M3 | 125 | 125 | 125 | 75 | 125 | 350 | 250 | 0.7 | 0.0147 | 0.985 | 6.3 | 1023 | 122 |
| M4 | 125 | 150 | 125 | 75 | 150 | 400 | 300 | 0.7 | 0.0146 | 0.985 | 8 | 1278 | 157 |
| Variables | CST Parameters | Variables | PARSEC Parameters |
|---|---|---|---|
| −0.1112 | P1 = rleup | 0.0216 | |
| −0.4286 | P2 = rlelo | 0.010 | |
| −0.2461 | P3 = Xup | 0.3826 | |
| 0.0525 | P4 = Yup | 0.1018 | |
| 0.1682 | P5 = YXXup | −1.201 | |
| 0.3288 | P6 = Xlow | 0.3633 | |
| 0.2567 | P7 = Ylow | −0.1081 | |
| 0.1788 | P8 = YXXlow | 1.526 | |
| P9 = yte | 0 | ||
| P10 = delta yte | 0 | ||
| P11 = alpha te | 8.5 | ||
| P12 = beta te | 8.5 |
| NREL S-809 | Relative Variation | ||||
|---|---|---|---|---|---|
| Experimental Data (OSU) | Optimized Airfoil (CST Method) | Optimized Airfoil (PARSEC Method) | CST with Experimental Data | PARSEC with Experimental Data | |
| 0.79 | 0.883 | 0.87 | +11.8% | +10.1% | |
| 0.0131 | 0.0134 | 0.0148 | −2.2% | −12.1% | |
| L/D | 60.3 | 65.9 | 58.8 | +9.6% | −2.0 % |
| AOA | 6.2° | 6.2° | 6.2° | ||
| Baseline Airfoil (Experimental) | Optimized Airfoil (CFD) | Relative Variation | |
|---|---|---|---|
| 0.79 | 0.985 | +24.6% | |
| 0.0131 | 0.0147 | +12.2% | |
| L/D | 60.3 | 67 | +12.4% |
| AOA (°) | 6.2° | 6.2° |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Akram, M.T.; Kim, M.-H. Aerodynamic Shape Optimization of NREL S809 Airfoil for Wind Turbine Blades Using Reynolds-Averaged Navier Stokes Model—Part II. Appl. Sci. 2021, 11, 2211. https://doi.org/10.3390/app11052211
Akram MT, Kim M-H. Aerodynamic Shape Optimization of NREL S809 Airfoil for Wind Turbine Blades Using Reynolds-Averaged Navier Stokes Model—Part II. Applied Sciences. 2021; 11(5):2211. https://doi.org/10.3390/app11052211
Chicago/Turabian StyleAkram, Md Tausif, and Man-Hoe Kim. 2021. "Aerodynamic Shape Optimization of NREL S809 Airfoil for Wind Turbine Blades Using Reynolds-Averaged Navier Stokes Model—Part II" Applied Sciences 11, no. 5: 2211. https://doi.org/10.3390/app11052211
APA StyleAkram, M. T., & Kim, M. -H. (2021). Aerodynamic Shape Optimization of NREL S809 Airfoil for Wind Turbine Blades Using Reynolds-Averaged Navier Stokes Model—Part II. Applied Sciences, 11(5), 2211. https://doi.org/10.3390/app11052211