
IpDFT-Tuned Estimation Algorithms for PMUs: Overview and Performance Comparison



Abstract
:Featured Application
Abstract
1. Introduction
- the capability to measure all quantities at times synchronized with the Universal Coordinated Time (UTC);
- the capability to stream real-time data to the so-called Phasor Data Concentrators (PDCs) with reporting rates ranging between about 10 frame/s and 100 frame/s;
- high measurement accuracy, as specified in the IEEE/IEC Standard 60255-118-1:2018, in the following simply referred to as the “Standard” for the sake of brevity [10];
- fast responsiveness (in the order of a few power line cycles) in order to trigger adequate protection schemes when severe phasor magnitude or phase changes occur due to faults or grid topology changes [11]. In this respect, the IEEE/IEC Standard classifies PMUs as protection-oriented (P Class) or measurement-oriented (M Class) devices. The former ones can indeed be less accurate than the latter, but of course they must be considerably faster.
2. Theoretical Background
2.1. Signal Model and Basic IpDFT Algorithm
2.2. IpDFTc Algorithm
- (with and given by (8) and (12), respectively) is the amplitude estimator of the fundamental sinewave after compensating for the fundamental frequency estimation bias due to the second harmonic and
- is the amplitude correction term [27].
2.3. Tuned Real-Valued TWLS Algorithm
2.4. Tuned Frequency Down-Conversion and Low-Pass Filtering (DCF)
3. Estimation Results and Performance Analysis
- the Total Vector Errors (TVEs), namely the magnitude of the error vectors of the estimated synchrophasor relative to the actual synchrophasor values at the same UTC reference times;
- the Frequency Errors (FE), i.e., the differences between the estimated fundamental frequencies and the actual ones and
- the Rate of change of Frequency Errors (RFEs) namely the differences between the estimated ROCOF values and the actual ones.
3.1. P Class and M Class Steady-State and Dynamic Testing Conditions
- Fundamental frequency off-nominal static deviations within ±2 Hz (P Class) or ±5 Hz (M Class);
- Harmonics from the 2nd to the 50th (taken one at a time) with amplitude set to 1% (P Class) or 10% (M Class) of the fundamental with the same off-nominal frequency deviations mentioned above;
- Amplitude modulation (AM) or phase modulation (PM) with modulation indexes equal to ka = 0.1 or kp = 0.1 rad, respectively, and frequency of the modulating tones equal to fa = fp = 2 Hz (P Class) or 5 Hz (M Class);
- Linear increment/decrement of the fundamental frequency at rates of ±1 Hz/s within ±2 Hz (P Class) or ±5 Hz (M Class);
- White zero-mean Gaussian noise with variance such that the Signal-to-Noise Ratio (SNR) is 60 dB (this testing condition is not mentioned in the IEEE/IEC Standard, but it has a high practical relevance due to the strong impact of wideband noise on frequency and above all ROCOF estimation [39]);
- Finally, in the M Class case only, a single inter-harmonic tone of amplitude equal to 10% of the fundamental and frequency changing within the bands [10 Hz, 25 Hz] or [75 Hz, 100 Hz] is generated for testing, assuming that the off-nominal fundamental frequency deviations are comprised within [−2.5 Hz, 2.5 Hz] and that RR = 50 readings/s.
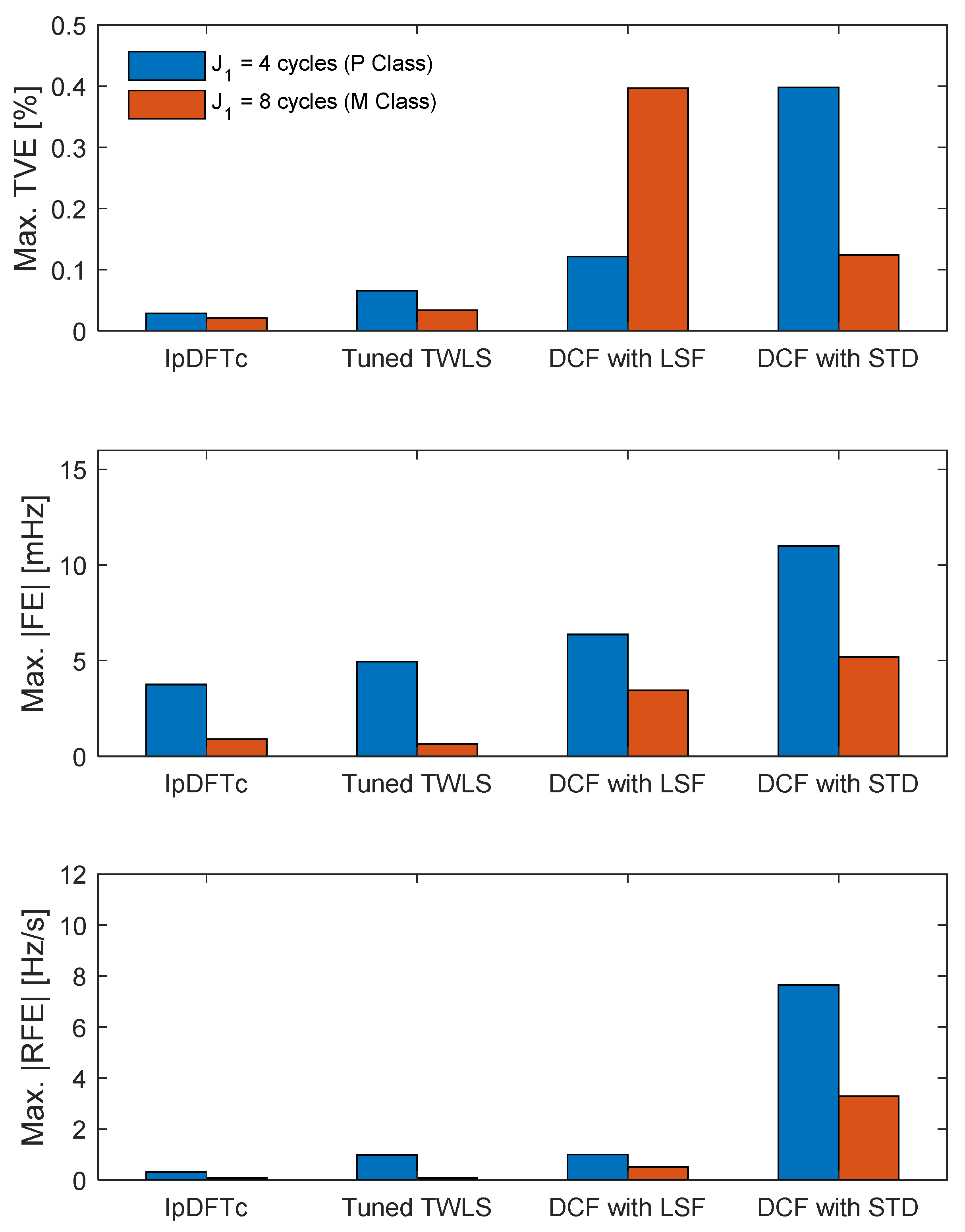
- As far as synchrophasor estimation is concerned, all algorithms return maximum TVE values compliant with the Standard even over observation intervals so short as two nominal power line cycles. However, the IpDFTc and the tuned-TWLS algorithms provide the lowest TVE values. In particular, the IpDFTc algorithm is generally preferable in steady-state testing conditions and in the presence of wideband noise, whereas the tuned TWLS estimator is superior when dynamic disturbances (i.e., modulations and frequency ramps) are considered.
- The estimation of the fundamental frequency is quite problematic. If just two cycles are observed, no estimator is able to meet the P Class |FE| limits reported in the Standard in all the testing conditions. In fact, further simulations showed that at least 3-cycle observation intervals are needed. In this scenario, the DCF approach with the STD filter seems to be globally preferable. If 4-cycle observation intervals are used, all estimators return results compliant with the Standard. The |FE| values are indeed comparable in most cases. However, the tuned TWLS approach appears slightly better than the others (and particularly much better than the IpDFTc under the effect of modulations).
- Finally, as far as ROCOF estimation is concerned, the IpDFTc estimator is the only one that is able to meet the P Class |RFE| limits reported in the Standard by using both 2-cycle and 4-cycle observation intervals. The tuned TWLS approach over 2-cycle intervals returns accurate results in most cases, but it is strongly affected by the presence of harmonics. On the other hand, if 4-cycle observation intervals are used, the IpDFTc, the tuned TWLS, and the DCF approach with the LSF filter exhibit comparable performances.
- As far as synchrophasor estimation is concerned, the maximum TVE values basically confirm the conclusions drawn in the P Class case. The IpDFTc algorithm is generally preferable in steady-state testing conditions and in the presence of wideband noise, whereas the tuned TWLS estimator is superior when dynamic disturbances (i.e., modulations and frequency ramps) are considered. However, in the M Class case, such differences are exacerbated. The tuned TWLS approach is not able to meet the Standard limits in the presence of out-of-band inter-harmonics over 6-cycle intervals, but it meets the Standard requirements over 8-cycle intervals. Quite interestingly, the accuracy of the tuned TWLS algorithm over longer intervals under dynamic conditions slightly degrades due to the larger Taylor’s series approximation errors of the phasor model at the edges of the observation intervals [29]. The IpDFTc estimator is not able to meet the Standard limits over 8-cycle intervals when amplitude or phase oscillations perturb the fundamental component. Only the DCF approach is able to meet the Standard limits with both interval lengths, although in some testing conditions it exhibits a slightly worse accuracy than the other algorithms.
- The |FE| values exhibit a trend similar to the TVE ones. The main difference is in the case of the DCF approach whose behavior is more heterogeneous. In this case, ensuring compliance with the Standard requirements is much more challenging. Indeed, no estimator is able to meet the Standard limits in the case of inter-harmonic interference over 6-cycle intervals. Over 8-cycle intervals instead, the IpDFTc estimator returns generally the best results except in the case of amplitude and phase modulations, which are more effectively mitigated by the DCF approach with the LSF filter.
- Finally, in the case of ROCOF estimation, almost all algorithms except the DCF approach with the STD filter exhibit good results. They are indeed compliant with the limits reported in the Standard (when defined). Globally, the IpDFTc estimator is preferable over 6-cycle intervals, whereas the tuned TWLS algorithm is better over 8-cycle intervals in accordance with the TVE trend.
3.2. Results in Transient Conditions
- The limits reported in the Standard are met in almost all cases with a few exceptions.
- The maximum synchrophasor and ROCOF response times of the TWLS estimator are always considerably shorter than those of the IpDFTc estimator. However, the IpDFTc frequency estimation response times are generally the shortest ones, except under the effect of amplitude steps when 4-cycle observation intervals are considered. In fact, this is the sole testing condition in which the DCF approach outperforms the other estimators. Furthermore, the over- and undershoots obtained with the IpDFTc estimator are generally smoother than those of the other algorithms. In any case, the over- and undershoots of all considered algorithms are well below the limits reported in the Standard. Therefore, they are not reported for the sake of brevity.
- As far as the measurement delay times are concerned, the tuned TWLS and the IpDFTc estimators exhibit similar performances, quite better than those of the DCF method. Moreover, they are well below the limits reported in the Standard [10].
4. Discussion
- an algorithm able to return fully compliant TVE, |FE|, |RFE| or response time values is considered to be better than another one exceeding even a single limit, regardless of the estimation errors associated with the individual tests;
- if two algorithms exhibit a different number of C and NC tests, the one with a larger number of compliant results in different tests is considered the better one, regardless of the estimation errors in the individual tests;
- if two algorithms exhibit the same amount of compliant or non-compliant tests and they do not clearly outperform one another (e.g., because results are very similar or because the number of testing conditions in which they are better is the same), the estimators are considered to have an equivalent performance.
5. Experimental Results in a Practical Case Study
- the IpDFTc estimator exhibits the best accuracy both over 4-cycle and 8-cycle observation intervals, as expected since it is natively conceived to counteract the effect of the 2nd harmonic;
- the tuned TWLS returns slightly worse results, but it is worth recalling that it behaves better in dynamic and transient testing conditions;
- the DCF technique is outperformed with either filter although the results obtained using a 4-cycle-long LSF are not much worse than those achieved with the IpDFTc and the tuned TWLS estimators. Note that the TVE values of the DCF technique with the LSF over 8-cycle intervals are quite worse than those over 4 cycle-intervals. However, this behavior is consistent with the corresponding simulation results shown in Table 4b and Table 5b and this is probably due to the larger bandwidth of the LSF with an 8-cycle-long impulse response compared with the LSF with a 4-cycle-long impulse response. Indeed, while the latter filter is conceived for P Class applications, the former one is optimized not to perturb stronger amplitude and phase oscillations in the M Class case. Thus, the LSF with an 8-cycle-long impulse response makes the DCF technique more sensitive to noise (e.g., injected by the experimental tested).
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Appendix A. Analytical Expressions of the Elements of Vector in (23)
References
- Phadke, A.G.; Thorp, J.S.; Adamiak, M.G. A New Measurement Technique for Tracking Voltage Phasors, Local System Frequency, and Rate of Change of Frequency. IEEE Trans. Power Appar. Syst. 1983, PAS-102, 1025–1038. [Google Scholar] [CrossRef]
- Laverty, D.M.; Best, R.J.; Morrow, D.J. Loss-of-mains protection system by application of phasor measurement unit technology with experimentally assessed threshold settings. IET Gener. Transm. Distrib. 2015, 9, 146–153. [Google Scholar] [CrossRef] [Green Version]
- Borghetti, A.; Nucci, C.A.; Paolone, M.; Ciappi, G.; Solari, A. Synchronized Phasors Monitoring During the Islanding Maneuver of an Active Distribution Network. IEEE Trans. Smart Grid 2011, 2, 82–91. [Google Scholar] [CrossRef] [Green Version]
- Pignati, M.; Zanni, L.; Romano, P.; Cherkaoui, R.; Paolone, M. Fault Detection and Faulted Line Identification in Active Distribution Networks Using Synchrophasors-Based Real-Time State Estimation. IEEE Trans. Power Deliv. 2017, 32, 381–392. [Google Scholar] [CrossRef] [Green Version]
- Aslanian, M.; Hamedani-Golshan, M.E.; Haes Alhelou, H.; Siano, P. Analyzing Six Indices for Online Short-Term Voltage Stability Monitoring in Power Systems. Appl. Sci. 2020, 10, 4200. [Google Scholar] [CrossRef]
- Liu, J.; Tang, J.; Ponci, F.; Monti, A.; Muscas, C.; Pegoraro, P.A. Trade-Offs in PMU Deployment for State Estimation in Active Distribution Grids. IEEE Trans. Smart Grid 2012, 3, 915–924. [Google Scholar] [CrossRef]
- Kong, X.; Chen, Y.; Xu, T.; Wang, C.; Yong, C.; Li, P.; Yu, L. A Hybrid State Estimator Based on SCADA and PMU Measurements for Medium Voltage Distribution System. Appl. Sci. 2018, 8, 1527. [Google Scholar] [CrossRef] [Green Version]
- Zanni, L.; Derviškadić, A.; Pignati, M.; Xu, C.; Romano, P.; Cherkaoui, R.; Abur, A.; Paolone, M. PMU-based linear state estimation of Lausanne subtransmission network: Experimental validation. Electr. Power Syst. Res. 2020, 189, 1–7. [Google Scholar] [CrossRef]
- Lin, C.; Wu, W.; Guo, Y. Decentralized Robust State Estimation of Active Distribution Grids Incorporating Microgrids Based on PMU Measurements. IEEE Trans. Smart Grid 2020, 11, 810–820. [Google Scholar] [CrossRef]
- IEC/IEEE 60255-118-1:2018, IEEE/IEC International Standard—Measuring Relays and Protection Equipment—Part 118-1: Synchrophasor for Power Systems—Measurements. 2018, pp. 1–78. Available online: https://webstore.iec.ch/preview/info_iecieee60255-118-1%7Bed1.0%7Den.pdf (accessed on 4 March 2021).
- Biswal, M.; Brahma, S.M.; Cao, H. Supervisory Protection and Automated Event Diagnosis Using PMU Data. IEEE Trans. Power Deliv. 2016, 31, 1855–1863. [Google Scholar] [CrossRef]
- Kim, J.; Kim, H.; Choi, S. Performance Criterion of Phasor Measurement Units for Distribution System State Estimation. IEEE Access 2019, 7, 106372–106384. [Google Scholar] [CrossRef]
- Barchi, G.; Fontanelli, D.; Macii, D.; Petri, D. On the Accuracy of Phasor Angle Measurements in Power Networks. IEEE Trans. Instrum. Meas. 2015, 64, 1129–1139. [Google Scholar] [CrossRef]
- Luiso, M.; Macii, D.; Tosato, P.; Brunelli, D.; Gallo, D.; Landi, C. A Low-Voltage Measurement Testbed for Metrological Characterization of Algorithms for Phasor Measurement Units. IEEE Trans. Instrum. Meas. 2018, 67, 2420–2433. [Google Scholar] [CrossRef]
- Tang, Y.; Stenbakken, G.N.; Goldstein, A. Calibration of Phasor Measurement Unit at NIST. IEEE Trans. Instrum. Meas. 2013, 62, 1417–1422. [Google Scholar] [CrossRef]
- Frigo, G.; Colangelo, D.; Derviskadic, A.; Pignati, M.; Narduzzi, C.; Paolone, M. Definition of Accurate Reference Synchrophasors for Static and Dynamic Characterization of PMUs. IEEE Trans. Instrum. Meas. 2017, 66, 2233–2246. [Google Scholar] [CrossRef]
- Belega, D.; Petri, D. Accuracy Analysis of the Multicycle Synchrophasor Estimator Provided by the Interpolated DFT Algorithm. IEEE Trans. Instrum. Meas. 2013, 62, 942–953. [Google Scholar] [CrossRef]
- Macii, D.; Petri, D.; Zorat, A. Accuracy Analysis and Enhancement of DFT-Based Synchrophasor Estimators in Off-Nominal Conditions. IEEE Trans. Instrum. Meas. 2012, 61, 2653–2664. [Google Scholar] [CrossRef]
- Agrez, D. Weighted multipoint interpolated DFT to improve amplitude estimation of multifrequency signal. IEEE Trans. Instrum. Meas. 2002, 51, 287–292. [Google Scholar] [CrossRef]
- Borkowski, J.; Kania, D.; Mroczka, J. Interpolated-DFT-Based Fast and Accurate Frequency Estimation for the Control of Power. IEEE Trans. Ind. Electron. 2014, 61, 7026–7034. [Google Scholar] [CrossRef]
- Radil, T.; Ramos, P.M.; Cruz Serra, A. New Spectrum Leakage Correction Algorithm for Frequency Estimation of Power System Signals. IEEE Trans. Instrum. Meas. 2009, 58, 1670–1679. [Google Scholar] [CrossRef]
- Belega, D.; Macii, D.; Petri, D. Power System Frequency Estimation Accuracy of Improved DFT-based Algorithms over Short Intervals. In Proceedings of the 2016 IEEE International Workshop on Applied Measurements for Power Systems (AMPS), Aachen, Germany, 27–29 September 2016; pp. 1–6. [Google Scholar]
- Wen, H.; Li, C.; Yao, W. Power System Frequency Estimation of Sine-Wave Corrupted With Noise by Windowed Three-Point Interpolated DFT. IEEE Trans. Smart Grid 2018, 9, 5163–5172. [Google Scholar] [CrossRef]
- Singh, A.K.; Pal, B.C. Rate of Change of Frequency Estimation for Power Systems Using Interpolated DFT and Kalman Filter. IEEE Trans. Power Syst. 2019, 34, 2509–2517. [Google Scholar] [CrossRef]
- Romano, P.; Paolone, M. Enhanced Interpolated-DFT for Synchrophasor Estimation in FPGAs: Theory, Implementation, and Validation of a PMU Prototype. IEEE Trans. Instrum. Meas. 2014, 63, 2824–2836. [Google Scholar] [CrossRef]
- Derviskadic, A.; Romano, P.; Paolone, M. Iterative-Interpolated DFT for Synchrophasor Estimation: A Single Algorithm for P- and M-Class Compliant PMUs. IEEE Trans. Instrum. Meas. 2018, 67, 547–558. [Google Scholar] [CrossRef] [Green Version]
- Belega, D.; Petri, D. Fast Procedures for Accurate Parameter Estimation of Sine-waves Affected by Noise and Harmonic Distortion. Digit. Signal Process 2021. under review. [Google Scholar]
- Belega, D.; Fontanelli, D.; Petri, D. Low-Complexity Least-Squares Dynamic Synchrophasor Estimation Based on the Discrete Fourier Transform. IEEE Trans. Instrum. Meas. 2015, 64, 3284–3296. [Google Scholar] [CrossRef]
- Tosato, P.; Macii, D.; Luiso, M.; Brunelli, D.; Gallo, D.; Landi, C. A Tuned Lightweight Estimation Algorithm for Low-Cost Phasor Measurement Units. IEEE Trans. Instrum. Meas. 2018, 67, 1047–1057. [Google Scholar] [CrossRef]
- Platas-Garza, M.A.; de la O Serna, J.A. Dynamic Phasor and Frequency Estimates through Maximally Flat Differentiators. IEEE Trans. Instrum. Meas. 2010, 59, 1803–1811. [Google Scholar] [CrossRef]
- Platas-Garza, M.A.; de la O Serna, J.A. Dynamic Harmonic Analysis through Taylor–Fourier Transform. IEEE Trans. Instrum. Meas. 2011, 60, 804–813. [Google Scholar] [CrossRef]
- Macii, D.; Petri, D. Digital Filters for Phasor Measurement Units: Design Criteria, Advantages and Limitations. In Proceedings of the 2019 IEEE 10th International Workshop on Applied Measurements for Power Systems (AMPS), Aachen, Germany, 25–27 September 2019; pp. 1–6. [Google Scholar]
- EN 50160:2010, Voltage Characteristics of Electricity Supplied by Public Distribution Systems, Brussels, Belgium, 2010.
- Harris, F.J. On the Use of Windows for Harmonic Analysis with the Discrete Fourier Transform. Proc. IEEE 1978, 66, 51–83. [Google Scholar] [CrossRef]
- Nuttall, A.H. Some windows with very good sidelobe behavior. IEEE Trans. Acoust. Speech Signal Process. 1981, ASSP-29, 84–91. [Google Scholar] [CrossRef] [Green Version]
- Belega, D.; Dallet, D. Multifrequency signal analysis by Interpolated DFT method with maximum sidelobe decay windows. Measurement 2009, 42, 420–426. [Google Scholar] [CrossRef]
- Macii, D.; Barchi, G.; Petri, D. Design criteria of digital filters for synchrophasor estimation. In Proceedings of the IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Minneapolis, MN, USA, 6–9 May 2013; pp. 1579–1584. [Google Scholar]
- Messina, F.; Vega, L.R.; Marchi, P.; Galarza, C.G. Optimal Differentiator Filter Banks for PMUs and Their Feasibility Limits. IEEE Trans. Instrum. Meas. 2017, 66, 2948–2956. [Google Scholar] [CrossRef]
- Macii, D.; Fontanelli, D.; Barchi, G.; Petri, D. Impact of Acquisition Wideband Noise on Synchrophasor Measurements: A Design Perspective. IEEE Trans. Instrum. Meas. 2016, 65, 2244–2253. [Google Scholar] [CrossRef]
- Ramos, P.M.; da Silva, M.F.; Martins, R.C.; Cruz Serra, A.M. Simulation and Experimental Results of Multiharmonic Least-Squares Fitting Algorithms Applied to Periodic Signals. IEEE Trans. Instrum. Meas. 2006, 55, 646–651. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
|
|
|
| (a) | |||||||||||||||
| Test Type | TVEmax(%) | |FE|max(mHz) | |RFE|max(Hz/s) | ||||||||||||
| Lim. | IpDFTc | Tuned TWLS | DCF | Lim. | IpDFTc | Tuned TWLS | DCF | Lim. | IpDFTc | Tuned TWLS | DCF | ||||
| LSF | STD | LSF | STD | LSF | STD | ||||||||||
| Freq. dev. only (±2 Hz) | 1 | 0.01 | 0.00 | 0.38 | 0.17 | 5 | 8.9 | 17.7 | 13.5 | 7.2 | 0.4 | 0.2 | 0.0 | 8.1 | 4.2 |
| Freq. dev.+ 1% harmonics | 1 | 0.01 | 0.74 | 0.38 | 0.17 | 5 | 10.6 | 141 | 14.1 | 7.5 | 0.4 | 0.3 | 54.7 | 8.4 | 4.8 |
| AM (fa = 2 Hz, ka = 10%) | 3 | 0.04 | 0.00 | 0.36 | 0.05 | 60 | 8.0 | 0.0 | 0.0 | 0.0 | 2.3 | 0.1 | 0.0 | 0.0 | 0.0 |
| PM (fp = 2 Hz, kp = 0.1 rad) | 3 | 0.04 | 0.00 | 0.37 | 0.03 | 60 | 1.8 | 0.5 | 1.6 | 0.7 | 2.3 | 0.0 | 0.0 | 0.6 | 0.0 |
| Freq. ramp 1 (±2 Hz @ ±1 Hz/s) | 1 | 0.02 | 0.00 | 0.40 | 0.19 | 10 | 5.4 | 10.8 | 13.9 | 7.2 | 0.4 | 0.1 | 0.0 | 8.0 | 4.2 |
| AWGN (SNR = 60 dB) | - | 0.03 | 0.04 | 0.36 | 0.03 | - | 14.1 | 24.3 | 2.7 | 2.5 | - | 0.6 | 1.4 | 0.3 | 0.3 |
| (b) | |||||||||||||||
| Test Type | TVEmax(%) | |FE|max(mHz) | |RFE|max(Hz/s) | ||||||||||||
| Lim. | IpDFTc | TunedTWLS | DCF | Lim. | IpDFTc | Tuned TWLS | DCF | Lim. | IpDFTc | Tuned TWLS | DCF | ||||
| LSF | STD | LSF | STD | LSF | STD | ||||||||||
| Freq. dev. only (±2 Hz) | 1 | 0.00 | 0.03 | 0.06 | 0.16 | 5 | 0.1 | 0.1 | 0.4 | 6.3 | 0.4 | 0.0 | 0.0 | 0.3 | 3.8 |
| Freq. dev.+ 1% harmonics | 1 | 0.00 | 0.01 | 0.06 | 0.16 | 5 | 0.1 | 1.4 | 0.4 | 6.5 | 0.4 | 0.0 | 0.3 | 0.3 | 4.0 |
| AM (fa = 2 Hz, ka = 10%) | 3 | 0.15 | 0.00 | 0.09 | 0.15 | 60 | 14.3 | 0.0 | 0.0 | 0.1 | 2.3 | 0.2 | 0.0 | 0.0 | 0.3 |
| PM (fp = 2 Hz, kp = 0.1 rad) | 3 | 0.16 | 0.00 | 0.06 | 0.12 | 60 | 2.1 | 1.8 | 0.4 | 2.0 | 2.3 | 0.0 | 0.0 | 0.0 | 0.0 |
| Freq. ramp 1 (±2 Hz @ ±1 Hz/s) | 1 | 0.07 | 0.03 | 0.06 | 0.21 | 10 | 0.1 | 0.1 | 0.5 | 6.3 | 0.4 | 0.0 | 0.0 | 0.4 | 3.8 |
| AWGN (SNR = 60 dB) | - | 0.02 | 0.03 | 0.09 | 0.02 | - | 2.9 | 3.5 | 2.9 | 2.2 | - | 0.2 | 0.3 | 0.3 | 0.1 |
| (a) | |||||||||||||||
| Test Type | TVEmax(%) | |FE|max(mHz) | |RFE|max(Hz/s) | ||||||||||||
| Lim. | IpDFTc | TunedTWLS | DCF | Lim. | IpDFTc | Tuned TWLS | DCF | Lim. | IpDFTc | Tuned TWLS | DCF | ||||
| LSF | STD | LSF | STD | LSF | STD | ||||||||||
| Freq. dev. only (±5 Hz) | 1 | 0.00 | 0.00 | 0.33 | 0.13 | 5 | 0.0 | 0.0 | 17.0 | 8.4 | 0.4 | 0.0 | 0.0 | 9.8 | 4.7 |
| Freq. dev.+ 10% harmonics | 1 | 0.00 | 0.02 | 0.34 | 0.13 | 5 | 0.1 | 0.2 | 21.1 | 10.2 | 0.4 | 0.0 | 0.3 | 12.1 | 6.5 |
| AM (fa = 5 Hz, ka = 10%) | 3 | 2.36 | 0.07 | 0.49 | 0.89 | 300 | 140 | 5.2 | 1.5 | 2.3 | 14 | 4.2 | 0.1 | 3.4 | 8.1 |
| PM (fp = 5 Hz, kp = 0.1 rad) | 3 | 2.12 | 0.07 | 0.32 | 0.69 | 300 | 70.4 | 59.0 | 9.6 | 36.4 | 14 | 2.1 | 1.7 | 1.5 | 1.9 |
| Freq. ramp 1 (±5 Hz @ ±1 Hz/s) | 1 | 0.15 | 0.00 | 0.29 | 0.20 | 10 | 0.0 | 0.1 | 1.2 | 9.0 | 0.4 | 0.0 | 0.0 | 0.1 | 4.0 |
| AWGN (SNR = 60 dB) | - | 0.02 | 0.03 | 0.33 | 0.02 | - | 1.3 | 1.6 | 14.1 | 1.0 | - | 0.1 | 0.1 | 9.1 | 0.1 |
| 10% inter-harmonics | 1.3 | 0.08 | 2.32 | 0.57 | 0.54 | 10 | 25.5 | 100 | 57.6 | 70.9 | - | 2.5 | 23.6 | 12.6 | 12.3 |
| (b) | |||||||||||||||
| Test Type | TVEmax(%) | |FE|max(mHz) | |RFE|max(Hz/s) | ||||||||||||
| Lim. | IpDFTc | TunedTWLS | DCF | Lim. | IpDFTc | Tuned TWLS | DCF | Lim. | IpDFTc | Tuned TWLS | DCF | ||||
| LSF | STD | LSF | STD | LSF | STD | ||||||||||
| Freq. dev. only (±5 Hz) | 1 | 0.00 | 0.00 | 0.34 | 0.11 | 5 | 0.0 | 0.00 | 0.7 | 9.9 | 0.4 | 0.0 | 0.0 | 0.4 | 5.7 |
| Freq. dev.+ 10% harmonics | 1 | 0.00 | 0.00 | 0.34 | 0.12 | 5 | 0.0 | 0.2 | 0.7 | 11.4 | 0.4 | 0.0 | 0.0 | 0.4 | 6.5 |
| AM (fa = 5 Hz, ka = 10%) | 3 | 3.92 | 0.21 | 0.43 | 1.46 | 300 | 164.7 | 9.9 | 0.5 | 4.2 | 14 | 4.9 | 0.1 | 2.2 | 17.8 |
| PM (fp = 5 Hz, kp = 0.1 rad) | 3 | 3.51 | 0.20 | 0.35 | 1.21 | 300 | 119.2 | 100.3 | 4.1 | 59.9 | 14 | 3.6 | 2.8 | 0.2 | 2.4 |
| Freq. ramp 1 (±5 Hz @ ±1 Hz/s) | 1 | 0.26 | 0.00 | 0.37 | 0.20 | 10 | 0.1 | 0.1 | 1.2 | 9.9 | 0.4 | 0.0 | 0.0 | 0.4 | 5.8 |
| AWGN (SNR = 60 dB) | - | 0.02 | 0.02 | 0.35 | 0.20 | - | 0.9 | 1.2 | 0.8 | 0.7 | - | 0.1 | 0.1 | 0.5 | 0.0 |
| 10% inter-harmonics | 1.3 | 0.02 | 0.02 | 0.38 | 0.12 | 10 | 3.6 | 6.5 | 7.7 | 7.8 | - | 0.4 | 0.3 | 1.3 | 3.0 |
| (a) | ||||||||||||||||
| Test Type | Obs. Inter. Length [cycles] | Synchrophasor Resp. Time (cycles) | Frequency Resp. Time (cycles) | ROCOF Resp. Time (cycles) | ||||||||||||
| Lim | IpDFTc | Tuned TWLS | DCF | Lim. | IpDFTc | Tuned TWLS | DCF | Lim. | IpDFTc | Tuned TWLS | DCF | |||||
| LSF | STD | LSF | STD | LSF | STD | |||||||||||
| ±10% amp. step | 2 | 2 | 1.05 | 0.56 | 1.23 | 1.18 | 4.5 | 1.84 | 1.88 | 9.15 | 2.76 | 6 | 2.89 | 1.80 | 9.32 | 2.98 |
| 4 | 2 | 1.99 | 0.94 | 1.04 | 2.29 | 4.5 | 3.56 | 3.66 | 2.73 | 4.45 | 6 | 4.68 | 3.43 | 7.97 | 4.91 | |
| ±10° phase step | 2 | 2 | 1.25 | 1.00 | 1.35 | 1.43 | 4.5 | 1.85 | 1.88 | 9.25 | 2.88 | 6 | 2.88 | 1.84 | 9.35 | 2.99 |
| 4 | 2 | 2.35 | 1.10 | 1.20 | 2.68 | 4.5 | 3.47 | 3.61 | 4.33 | 4.74 | 6 | 4.64 | 3.58 | 8.18 | 4.98 | |
| (b) | ||||||||||||||||
| Test Type | Obs. Inter. [cycles] | |Delay Time| (ms) | ||||||||||||||
| Lim. | IpDFTc | Tuned TWLS | DCF | |||||||||||||
| LSF | STD | |||||||||||||||
| ±10% amp. step | 2 | 5 | 1.50 | 1.67 | 3.00 | 1.80 | ||||||||||
| 4 | 5 | 1.50 | 1.50 | 1.80 | 1.80 | |||||||||||
| ±10° phase step | 2 | 5 | 1.83 | 2.00 | 4.70 | 2.80 | ||||||||||
| 4 | 5 | 1.83 | 1.83 | 2.00 | 2.50 | |||||||||||
| (a) | ||||||||||||||||
| Test Type | Obs. Inter. (cycles) | Synchrophasor Resp. Time (cycles) | Frequency Resp. Time (cycles) | ROCOF Resp. Time (cycles) | ||||||||||||
| Lim | IpDFTc | Tuned TWLS | DCF | Lim. | IpDFTc | Tuned TWLS | DCF | Lim. | IpDFTc | Tuned TWLS | DCF | |||||
| LSF | STD | LSF | STD | LSF | STD | |||||||||||
| ±10% amp. step | 6 | 7 | 2.96 | 1.36 | 1.68 | 1.98 | 14 | 5.17 | 5.37 | 5.78 | 4.14 | 14 | 6.43 | 4.90 | 7.33 | 12.27 |
| 8 | 7 | 3.93 | 1.78 | 1.81 | 2.60 | 14 | 6.71 | 6.99 | 4.37 | 4.96 | 14 | 8.09 | 6.17 | 8.98 | 8.91 | |
| ±10° phase step | 6 | 7 | 3.49 | 1.56 | 1.94 | 2.32 | 14 | 5.13 | 5.31 | 7.13 | 6.36 | 14 | 6.36 | 5.22 | 7.33 | 12.28 |
| 8 | 7 | 4.63 | 2.04 | 2.17 | 3.06 | 14 | 6.66 | 6.96 | 7.11 | 7.23 | 14 | 8.05 | 6.78 | 8.98 | 8.91 | |
| (b) | ||||||||||||||||
| Test Type | Obs. Inter. [cycles] | |Delay Time| (ms) | ||||||||||||||
| Lim. | IpDFTc | Tuned TWLS | DCF | |||||||||||||
| LSF | STD | |||||||||||||||
| ±10% amp. step | 6 | 5 | 1.50 | 1.50 | 1.50 | 1.50 | ||||||||||
| 8 | 5 | 1.50 | 1.50 | 2.20 | 2.00 | |||||||||||
| ±10° phase step | 6 | 5 | 1.83 | 1.83 | 4.80 | 4.50 | ||||||||||
| 8 | 5 | 1.83 | 1.83 | 3.00 | 4.70 | |||||||||||
| (a) | ||||||||
| Estimation Algorithm | No. Cycles | TVE | |FE| | |RFE| | Phasor Resp. Time | Freq. Resp. Time | ROCOF Resp. Time | Delay Time |
| IpDFTc | 2 | C | NC | C | C | C | C | C |
| 4 | C | C | C | NC | C | C | C | |
| Tuned TWLS | 2 | C | NC | NC | C | C | C | C |
| 4 | C | C | C | C | C | C | C | |
| DCF with LSF | 2 | C | NC | NC | C | NC | NC | C |
| 4 | C | C | C | C | C | NC | C | |
| DCF with STD | 2 | C | NC | NC | C | C | C | C |
| 4 | C | NC | NC | NC | NC | C | C | |
| (b) | ||||||||
| Estimation Algorithm | No. Cycles | TVE | |FE| | |RFE| | Phasor Resp. Time | Freq. Resp. Time | ROCOF Resp. Time | Delay Time |
| IpDFTc | 6 | C | NC | C | C | C | C | C |
| 8 | NC | C | C | C | C | C | C | |
| Tuned TWLS | 6 | NC | NC | C | C | C | C | C |
| 8 | C | C | C | C | C | C | C | |
| DCF with LSF | 6 | C | NC | NC | C | C | C | C |
| 8 | C | C | C | C | C | C | C | |
| DCF with STD | 6 | C | NC | NC | C | C | C | C |
| 8 | C | NC | NC | C | C | C | C | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Macii, D.; Belega, D.; Petri, D. IpDFT-Tuned Estimation Algorithms for PMUs: Overview and Performance Comparison. Appl. Sci. 2021, 11, 2318. https://doi.org/10.3390/app11052318
Macii D, Belega D, Petri D. IpDFT-Tuned Estimation Algorithms for PMUs: Overview and Performance Comparison. Applied Sciences. 2021; 11(5):2318. https://doi.org/10.3390/app11052318
Chicago/Turabian StyleMacii, David, Daniel Belega, and Dario Petri. 2021. "IpDFT-Tuned Estimation Algorithms for PMUs: Overview and Performance Comparison" Applied Sciences 11, no. 5: 2318. https://doi.org/10.3390/app11052318
APA StyleMacii, D., Belega, D., & Petri, D. (2021). IpDFT-Tuned Estimation Algorithms for PMUs: Overview and Performance Comparison. Applied Sciences, 11(5), 2318. https://doi.org/10.3390/app11052318