
Real-Time Prediction of Operating Parameter of TBM during Tunneling




Abstract
:1. Introduction
2. Methodology
2.1. ARIMAX
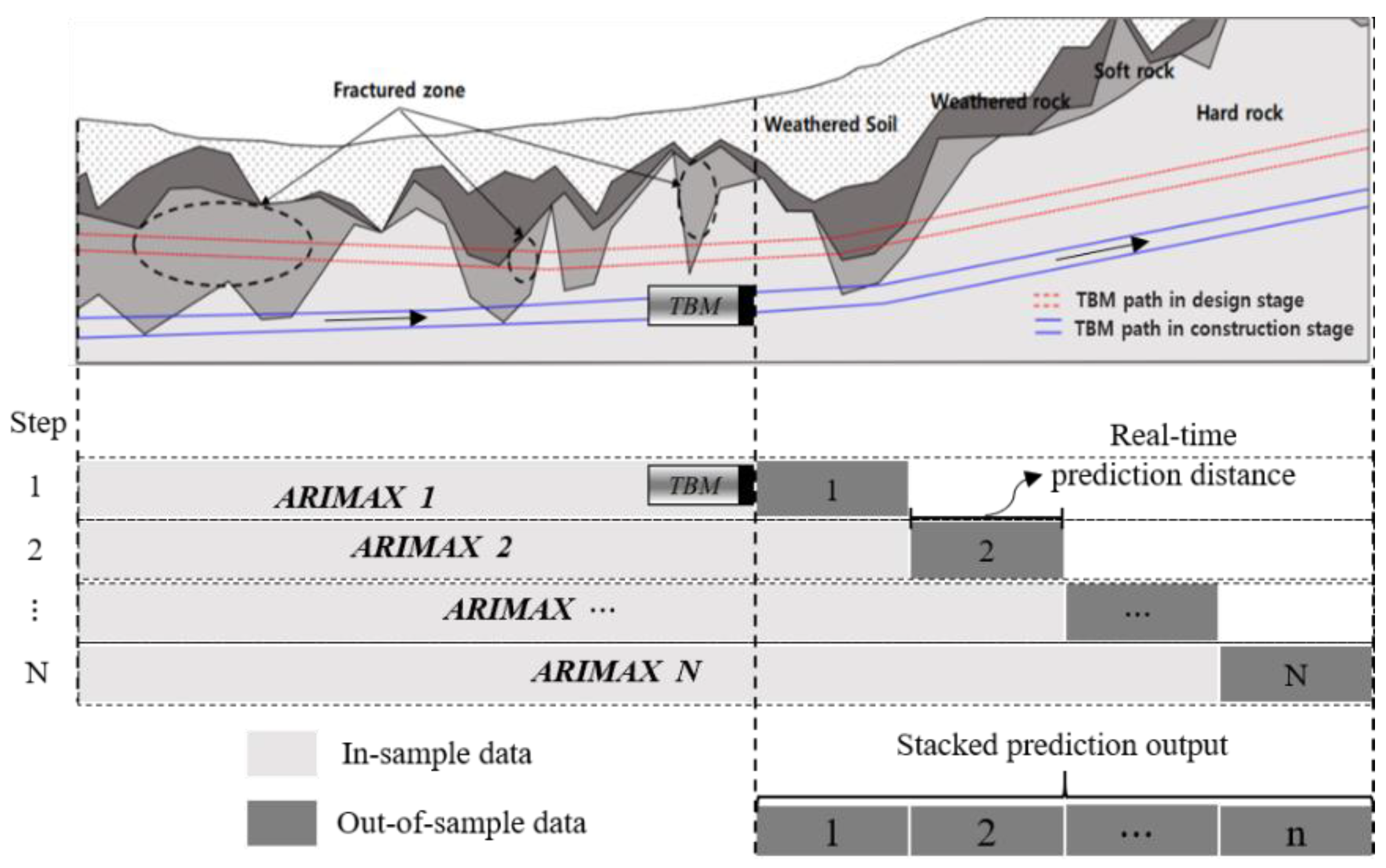
2.2. Real-Time Prediction: Walk Forward
2.3. Algorithm for Real-Time Model Construction
3. Data Acquisition and Preprocessing
3.1. Brief Introduction to Projects A-1 and B-2
3.2. Data Augmentation
4. Prediction Results
4.1. Initial Conditions and Prediction Procedure
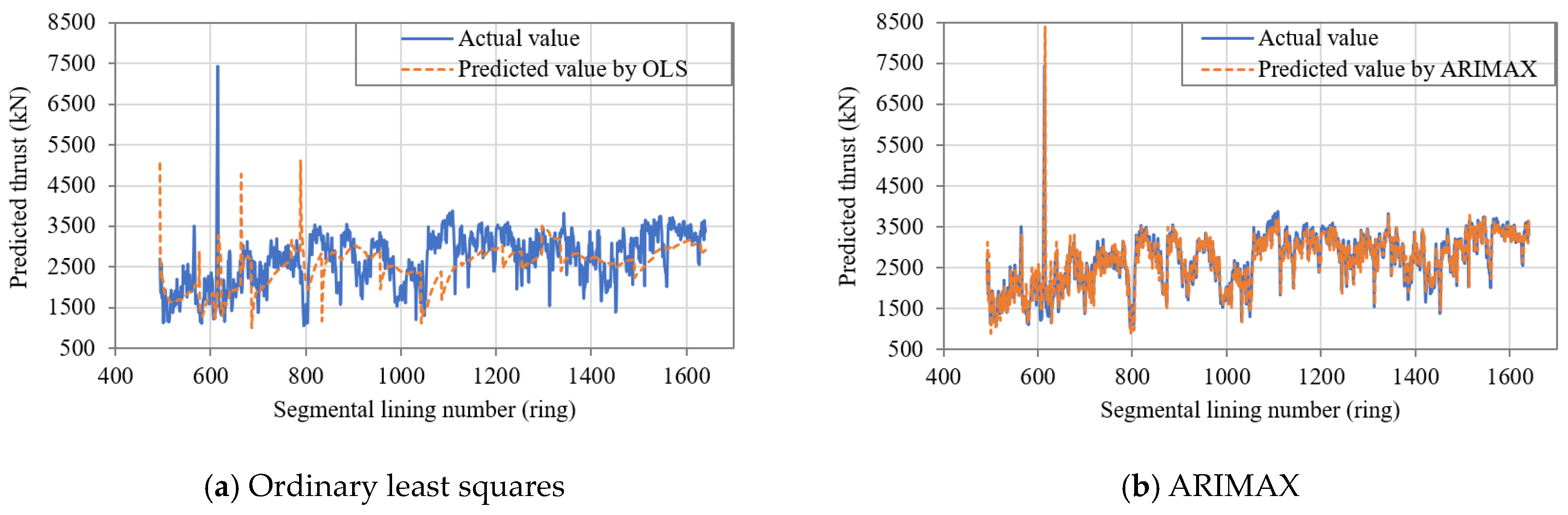
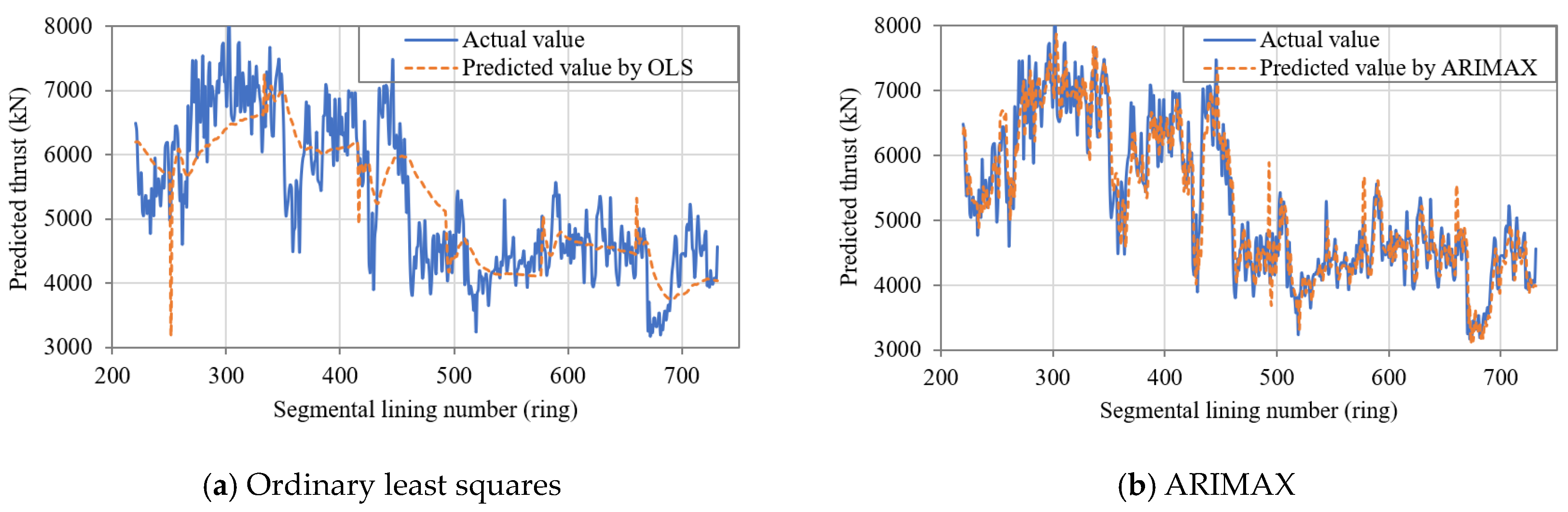
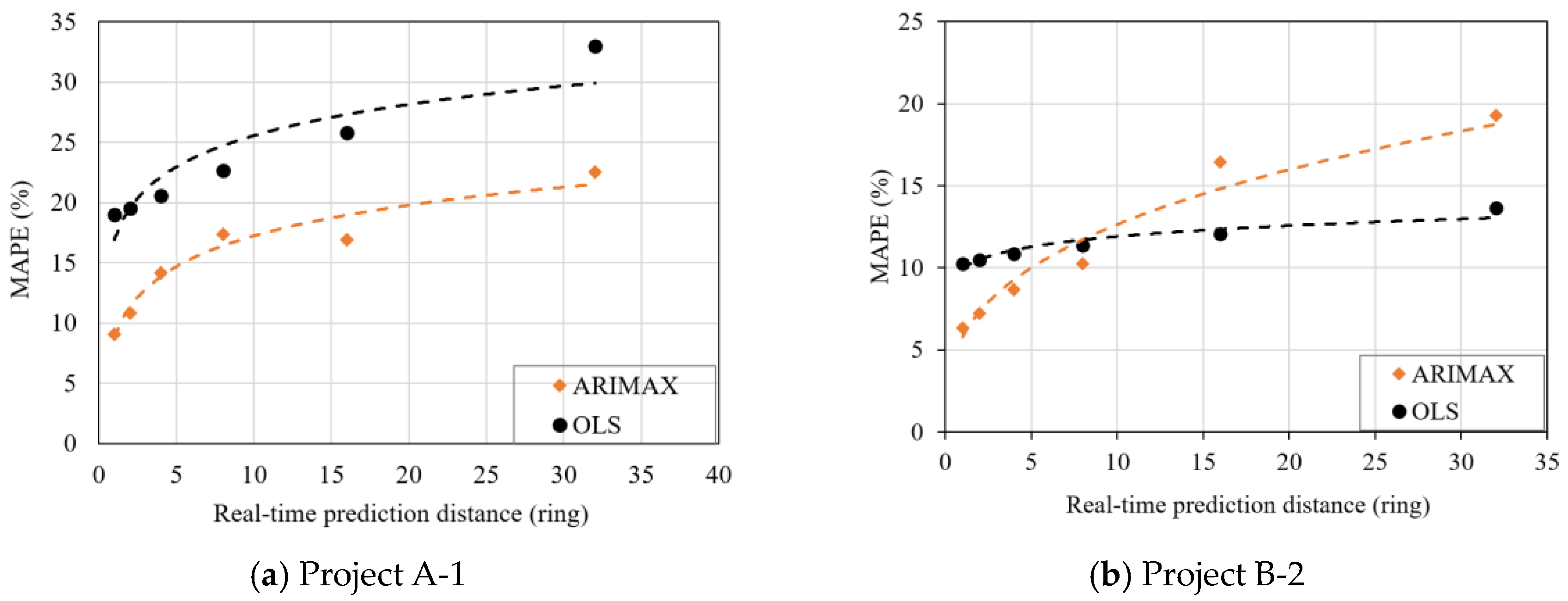
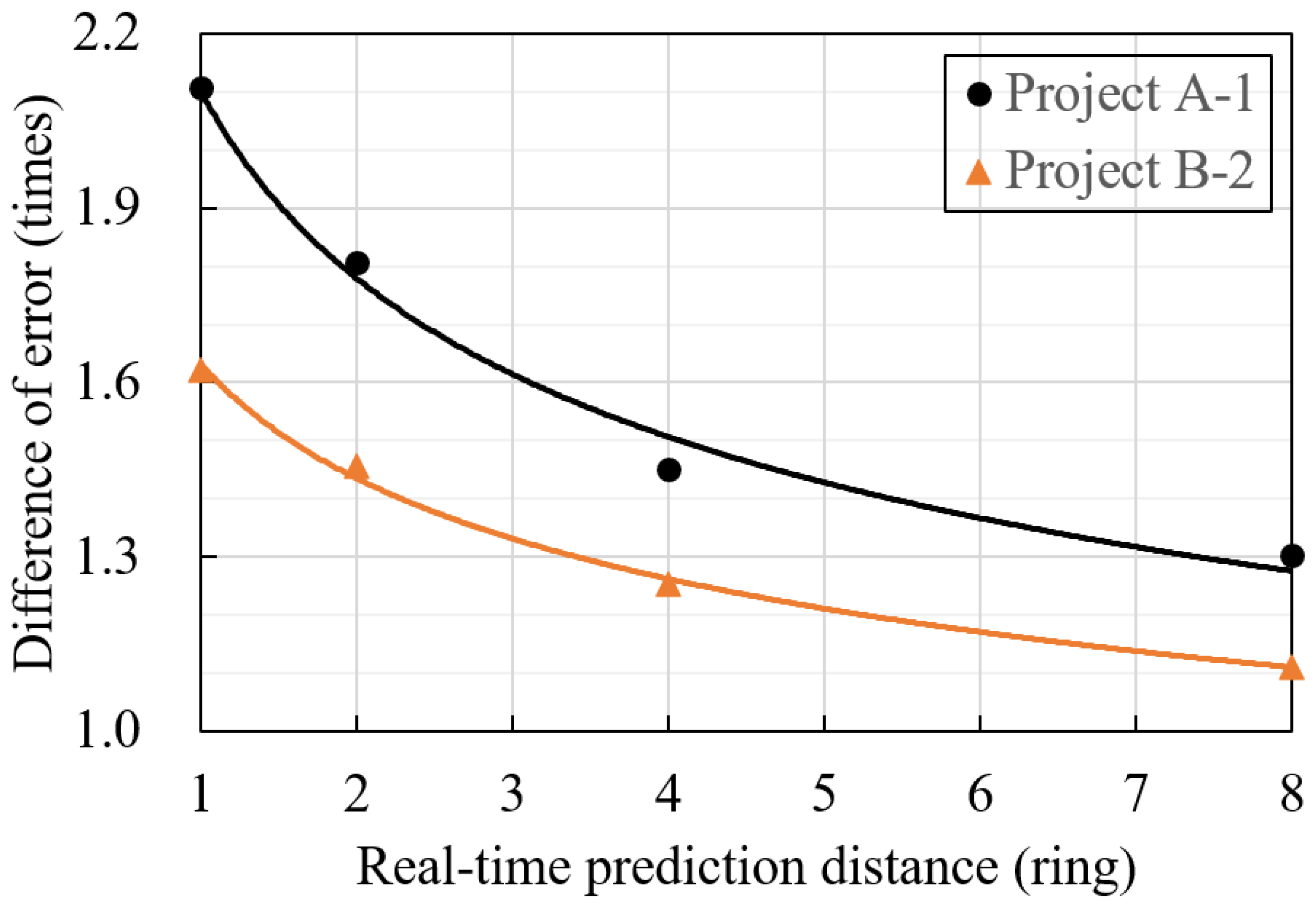
4.2. Prediction Analysis
4.3. Contributions and Limitations
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Delisio, A.; Zhao, J. A new model for TBM performance prediction in blocky rock conditions. Tunn. Undergr. Space Technol. 2014, 43, 440–452. [Google Scholar] [CrossRef]
- Rostami, J. Performance prediction of hard rock Tunnel Boring Machines (TBMs) in difficult ground. Tunn. Undergr. Space Technol. 2016, 57, 173–182. [Google Scholar] [CrossRef]
- Maidl, B.; Herrenknecht, M.; Maidl, U.; Wehrmeyer, G. Mechanised Shield Tunnelling; John Wiley & Sons: Berlin, Germamy, 2013. [Google Scholar]
- Wang, L.; Gong, G.; Shi, H.; Yang, H. Modeling and analysis of thrust force for EPB shield tunneling machine. Autom. Constr. 2012, 27, 138–146. [Google Scholar] [CrossRef]
- Zhang, Q.; Su, C.X.; Qin, Q.H.; Cai, Z.X.; Hou, Z.D.; Kang, Y.L. Modeling and prediction for the thrust on EPB TBMs under different geological condi-tions by considering mechanical decoupling. Sci. China Technol. Sci. 2016, 59, 1428–1434. [Google Scholar] [CrossRef]
- Gertsch, R.; Gertsch, L.; Rostami, J. Disc cutting tests in Colorado Red Granite: Implications for TBM performance prediction. Int. J. Rock Mech. Min. Sci. 2007, 44, 238–246. [Google Scholar] [CrossRef]
- Cho, J.-W.; Jeon, S.; Jeong, H.-Y.; Chang, S.-H. Evaluation of cutting efficiency during TBM disc cutter excavation within a Korean granitic rock using linear-cutting-machine testing and photogrammetric measurement. Tunn. Undergr. Space Technol. 2013, 35, 37–54. [Google Scholar] [CrossRef]
- Yagiz, S. New equations for predicting the field penetration index of tunnel boring machines in frac-tured rock mass. Arab. J. Geosci. 2017, 10, 33. [Google Scholar] [CrossRef]
- Hassanpour, J.; Firouzei, Y.; Hajipour, G. Actual performance analysis of a double shield TBM through sedimentary and low to medium grade metamorphic rocks of Ghomrood water conveyance tunnel project (lots 3 and 4). Bull. Int. Assoc. Eng. Geol. 2021, 80, 1419–1432. [Google Scholar] [CrossRef]
- Naghadehi, M.Z.; Samaei, M.; Ranjbarnia, M.; Nourani, V. State-of-the-art predictive modeling of TBM performance in changing geolog-ical conditions through gene expression programming. Measurement 2018, 126, 46–57. [Google Scholar] [CrossRef]
- Salimi, A.; Rostami, J.; Moormann, C.; Delisio, A. Application of non-linear regression analysis and artificial intelligence algorithms for performance prediction of hard rock TBMs. Tunn. Undergr. Space Technol. 2016, 58, 236–246. [Google Scholar] [CrossRef]
- Sun, W.; Shi, M.; Zhang, C.; Zhao, J.; Song, X. Dynamic load prediction of tunnel boring machine (TBM) based on heterogeneous in-situ data. Autom. Constr. 2018, 92, 23–34. [Google Scholar] [CrossRef]
- Gao, X.; Shi, M.; Song, X.; Zhang, C.; Zhang, H. Recurrent neural networks for real-time prediction of TBM operating parameters. Autom. Constr. 2019, 98, 225–235. [Google Scholar] [CrossRef]
- Delisio, A.; Zhao, J.; Einstein, H.H. Analysis and prediction of TBM performance in blocky rock conditions at the Lötschberg Base Tunnel. Tunn. Undergr. Space Technol. 2013, 33, 131–142. [Google Scholar] [CrossRef]
- Villeneuve, M. Using Tunnel Boring Machine Penetration Tests to Quantify Performance in Hard Rock; UC Research Repository: Napier, Italy, 2017. [Google Scholar]
- Box, G.E.; Jenkins, G.M.; Reinsel, G.C.; Ljung, G.M. Time Series Analysis: Forecasting and Control; John Wiley & Son: Hoboken, NJ, USA, 2015. [Google Scholar]
- Yule, G.U. Why do we sometimes get nonsense-correlations between Time-Series?—A study in sam-pling and the nature of time-series. J. R. Stat. Soc. 1926, 89, 1–63. [Google Scholar] [CrossRef]
- Slutsky, E. Problems of Economic Conditions, 3, 1 (1927). Engl. Transl. Econom. 1937, 5, 105. [Google Scholar]
- Bruland, A. Hard Rock Tunnel Boring; Fakultet for ingeniørvitenskap og teknologi: Trondheim, Norway, 2000. [Google Scholar]
- Rostami, J. Development of a Force Estimation Model for Rock Fragmentation with Disc Cutters through Theoretical Modeling and Physical Measurement of Crushed Zone Pressure. Ph.D. Thesis, Colorado School of Mines Golden, Golden, CO, USA, 1997. [Google Scholar]
- Kirkpatrick, C.D., II; Dahlquist, J.A. Technical Analysis: The Complete Resource for Financial Market Technicians; FT Press: Upper Saddle River, NJ, USA, 2010. [Google Scholar]
- Akaike, H. Information theory and an extension of the maximum likelihood principle. In Selected Papers of Hirotugu Akaike; Springer: Berlin/Heidelberg, Germany, 1998; pp. 199–213. [Google Scholar]
- Williams, B.M. Multivariate Vehicular Traffic Flow Prediction: Evaluation of ARIMAX Modeling. Transp. Res. Rec. 2001, 1776, 194–200. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| List | Project | |
|---|---|---|
| A-1 | B-2 | |
| TBM type | EPB shield | Slurry shield |
| Excavation diameter | 3.40 m | 353 m |
| Maximum thrust | 9600 kN | 12,000 kN |
| Maximum cutterhead revolution per minute | 90 rev/min | 4.6 rev/min |
| Maximum cutterhead power | 630 kW | 440 kW |
| Maximum cutterhead torque | 1250 kN·m | 1410 kN·m |
| Project | Number of Data | |
|---|---|---|
| Borehole Dataset | TBM Operating Dataset | |
| A-1 | 41 | 1641 |
| B-2 | 10 | 731 |
| Input Category | Contents |
|---|---|
| Geological parameter | UCS, RQD, RMR, Pw, Sw, De, Ab |
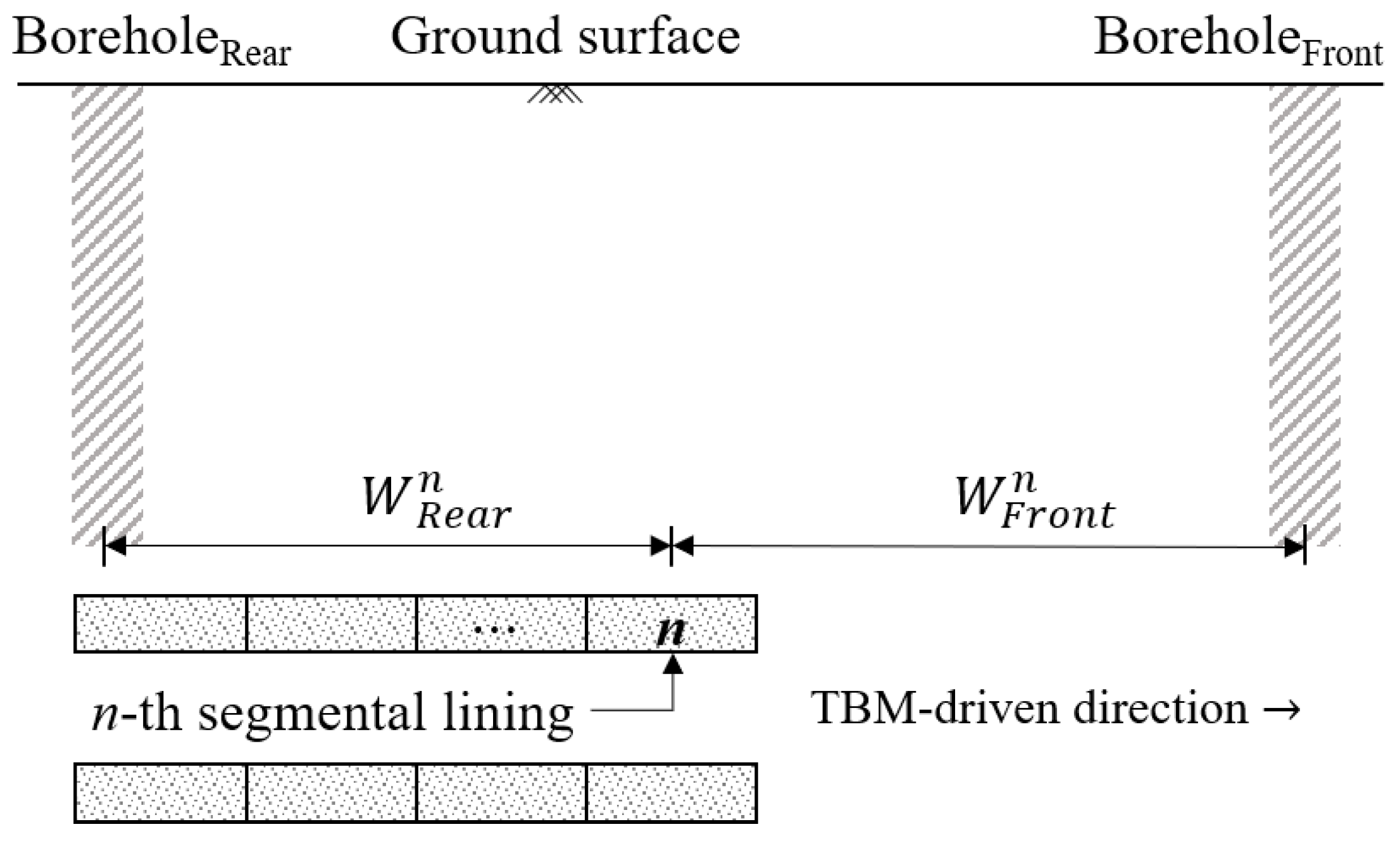
| Weight parameter | W |
| Operating parameter | Thrust (previous) |
| Hyperparameter | Range | Sampling Method |
|---|---|---|
| and | 1–5 | Grid search |
| 0–2 | ||
| 0–2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, H.-L.; Song, K.-I.; Qi, C.; Kim, J.-S.; Kim, K.-S. Real-Time Prediction of Operating Parameter of TBM during Tunneling. Appl. Sci. 2021, 11, 2967. https://doi.org/10.3390/app11072967
Lee H-L, Song K-I, Qi C, Kim J-S, Kim K-S. Real-Time Prediction of Operating Parameter of TBM during Tunneling. Applied Sciences. 2021; 11(7):2967. https://doi.org/10.3390/app11072967
Chicago/Turabian StyleLee, Hang-Lo, Ki-Il Song, Chongchong Qi, Jin-Seop Kim, and Kyoung-Su Kim. 2021. "Real-Time Prediction of Operating Parameter of TBM during Tunneling" Applied Sciences 11, no. 7: 2967. https://doi.org/10.3390/app11072967
APA StyleLee, H. -L., Song, K. -I., Qi, C., Kim, J. -S., & Kim, K. -S. (2021). Real-Time Prediction of Operating Parameter of TBM during Tunneling. Applied Sciences, 11(7), 2967. https://doi.org/10.3390/app11072967