
Digital Modelling of Underground Volumes, Including the Visualization of Confidence Levels for the Positioning of Subsurface Objects



Abstract
:1. Introduction
2. Methodology to Complete Missing Spatial and Geometrical Attributes
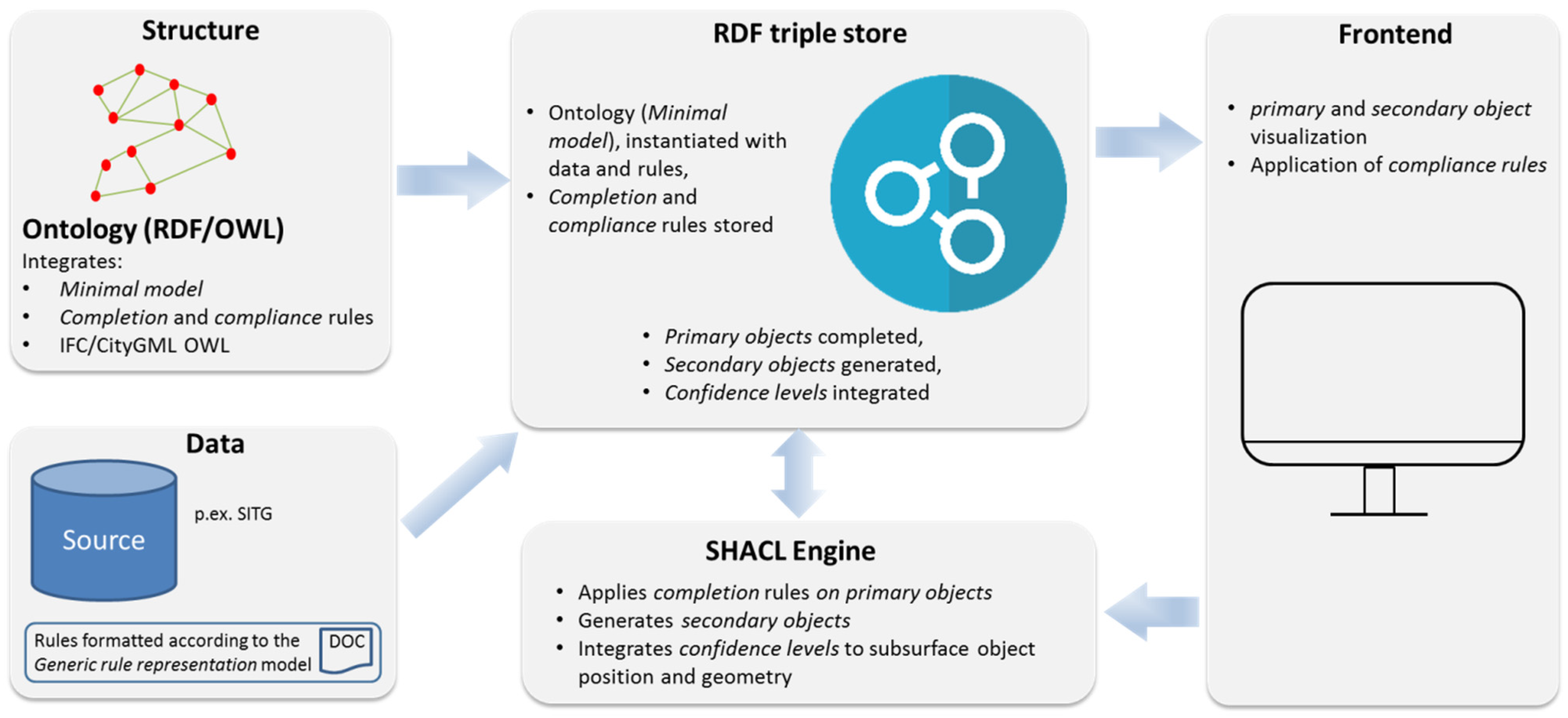
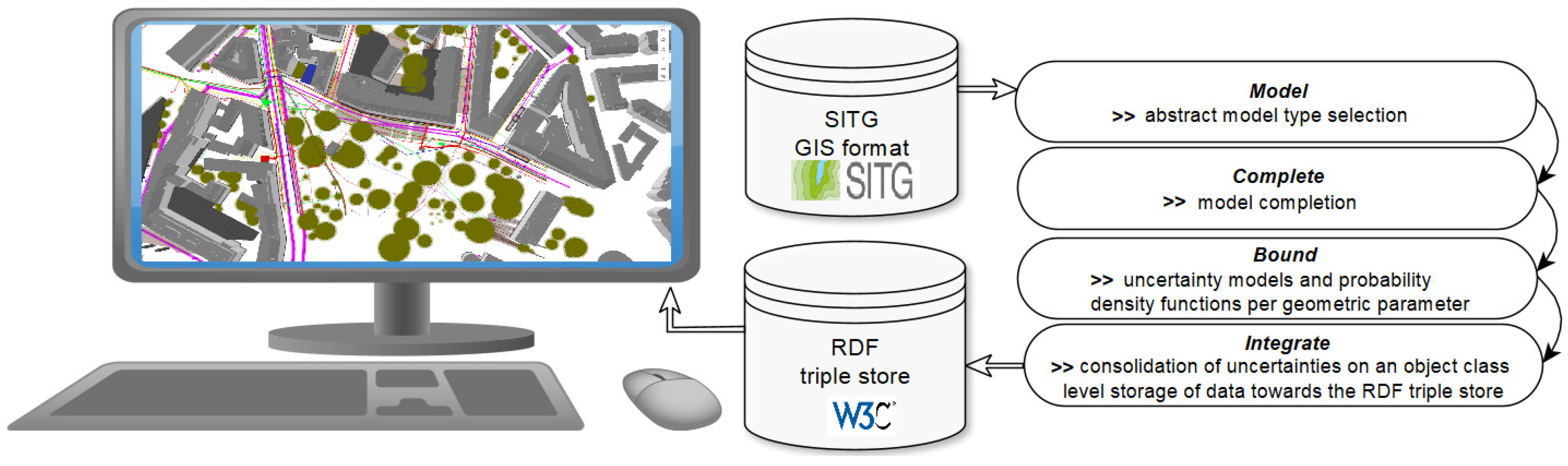
2.1. General Overview
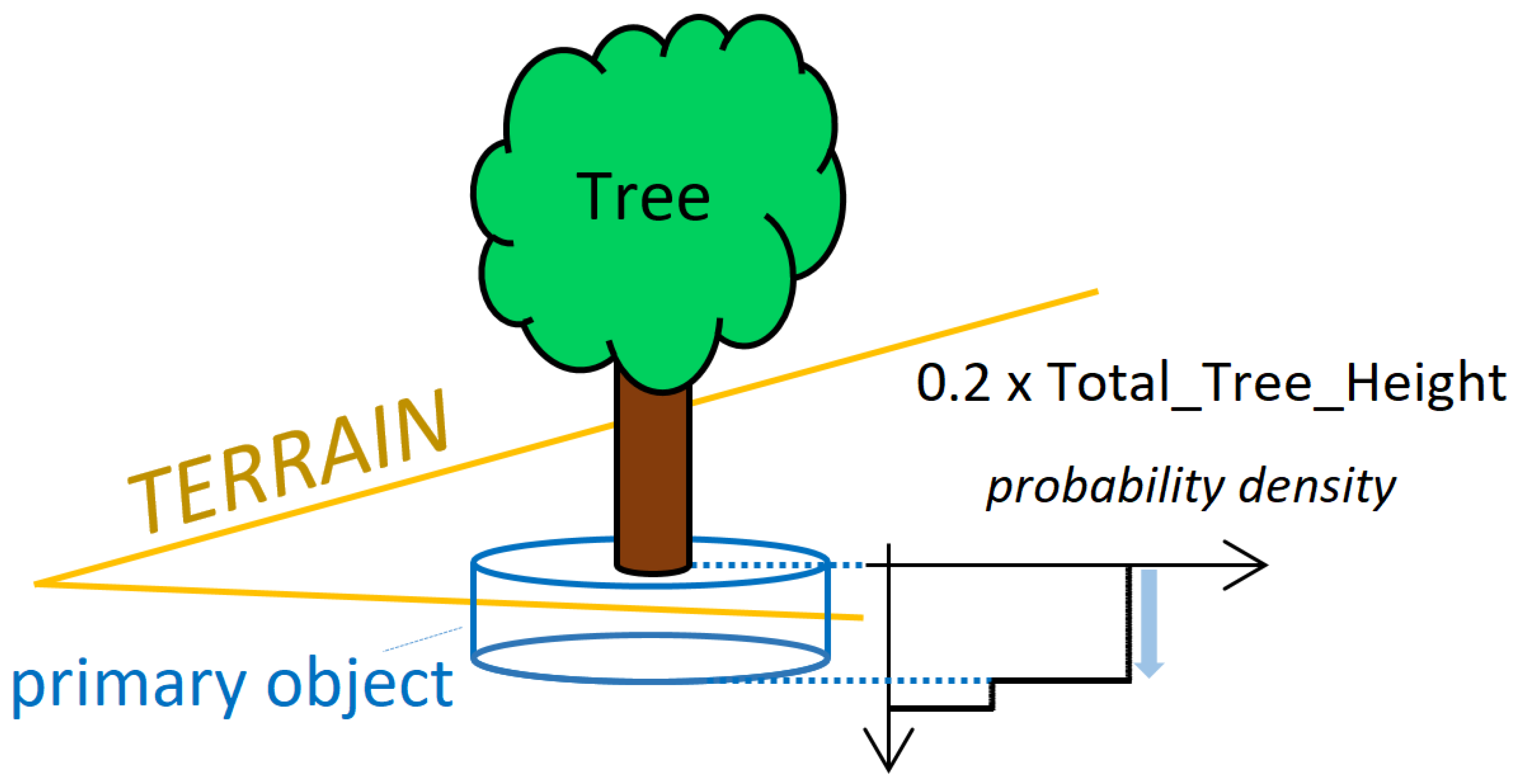
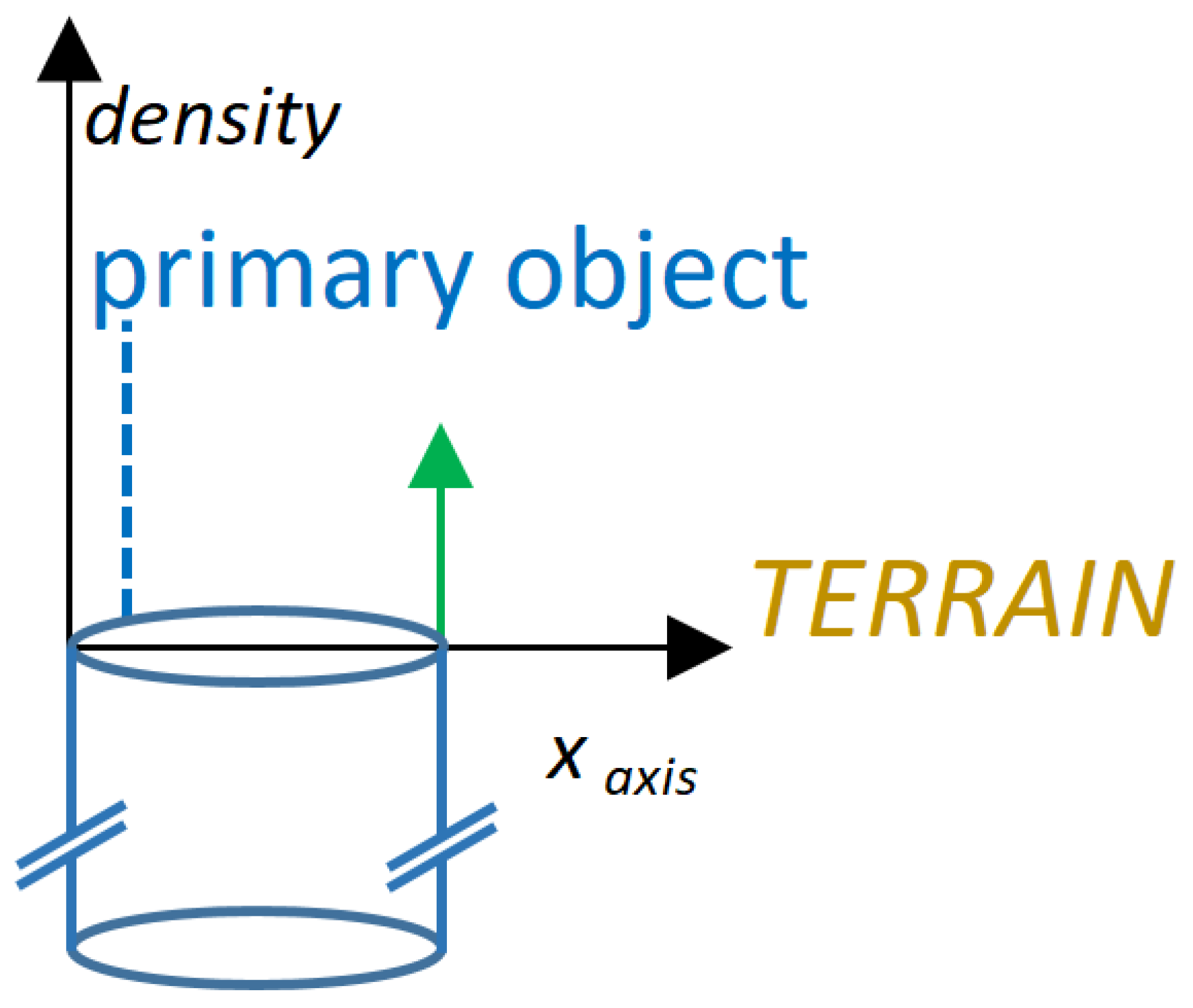
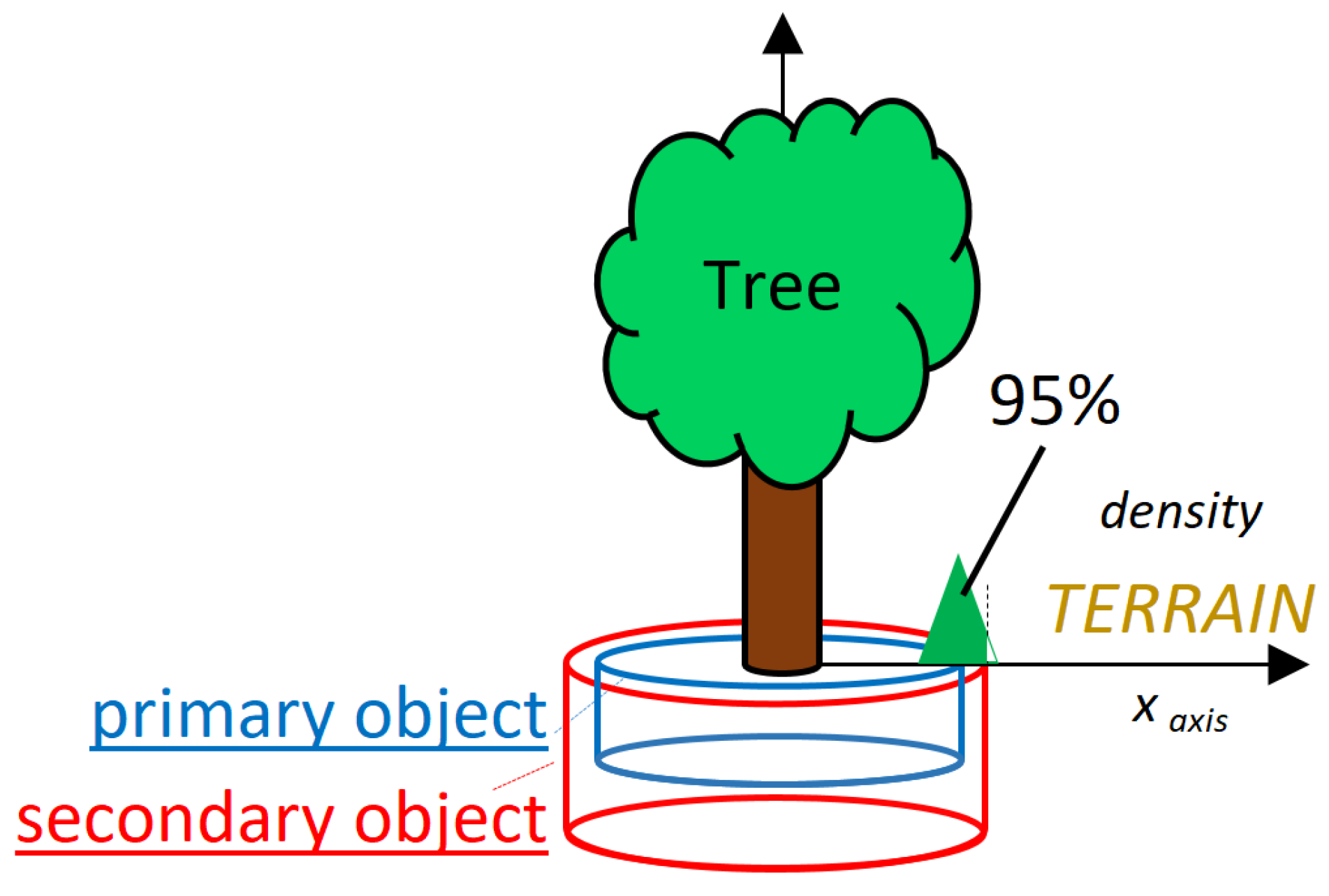
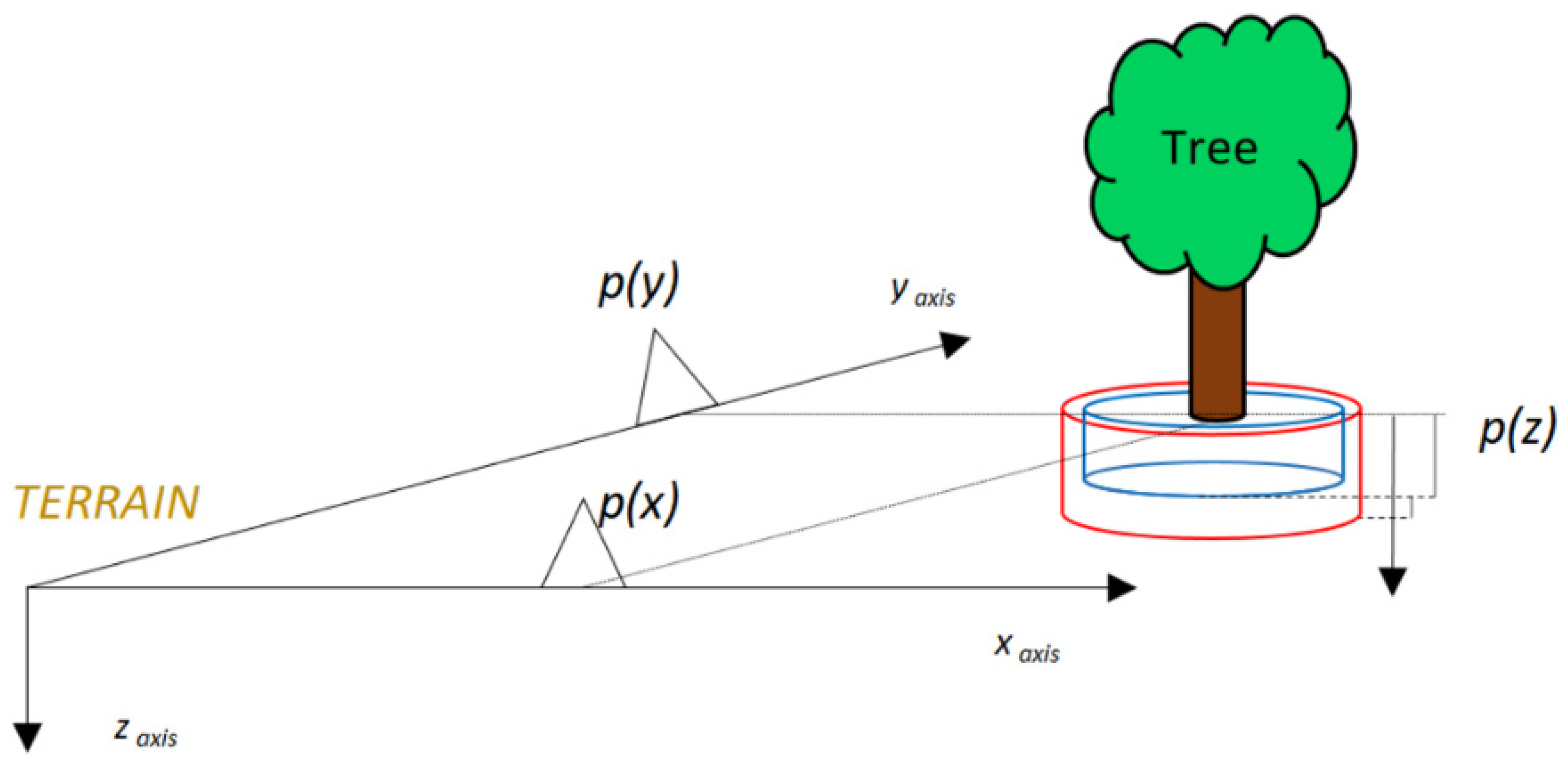
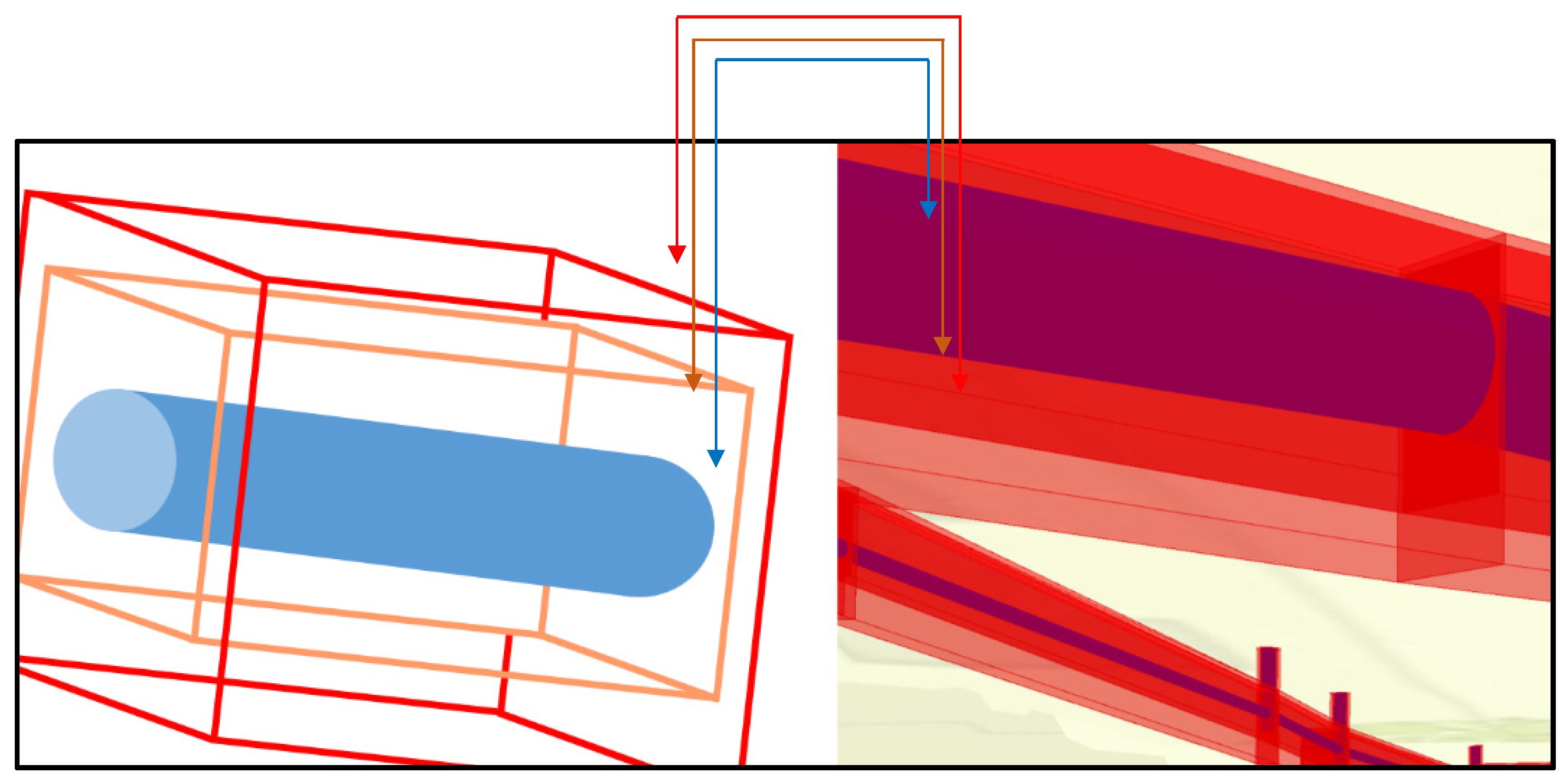
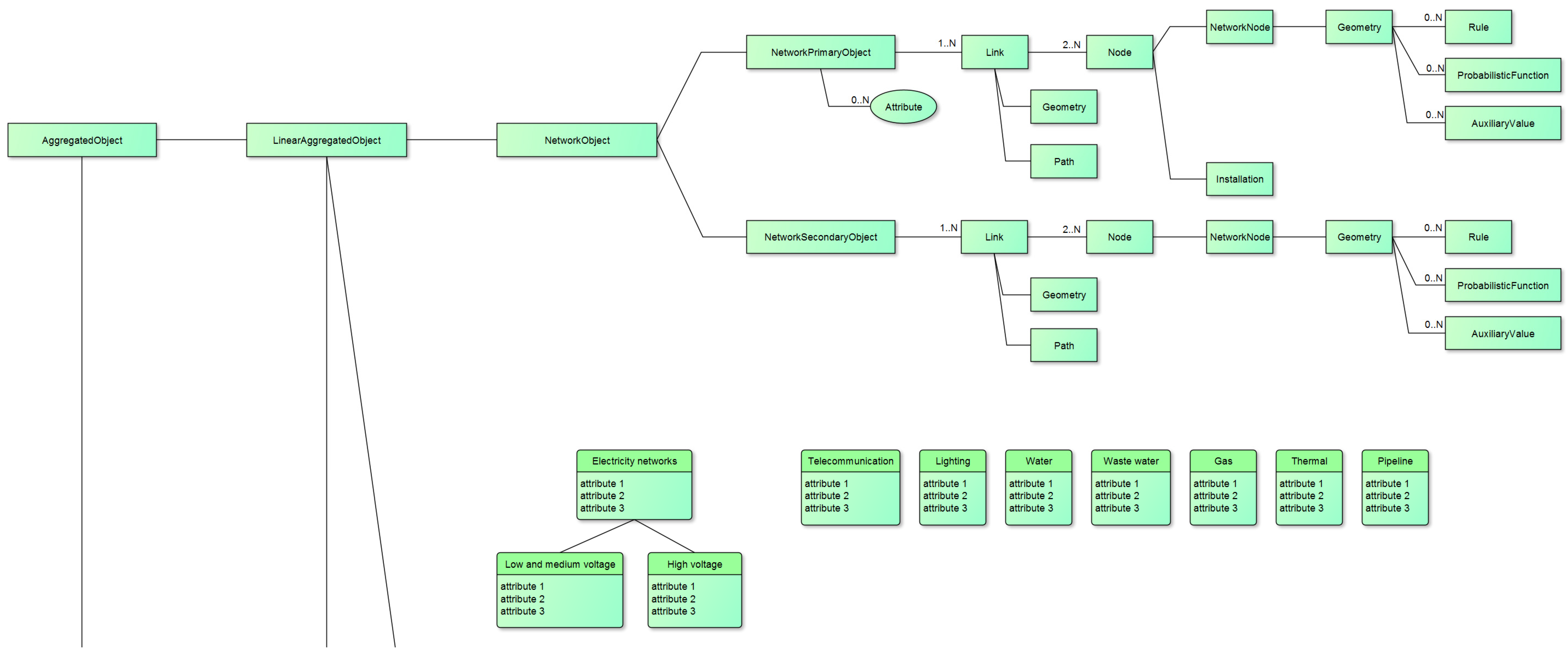
- A primary object: to describe a geometrically simplified version of the real object, integrating data completion strategies.
- A secondary object: to consider a virtual bounding box assigned to a confidence metric aimed at measuring the probability that the full primary object is inside it.
2.2. Detailed Methodology and Illustrative Examples
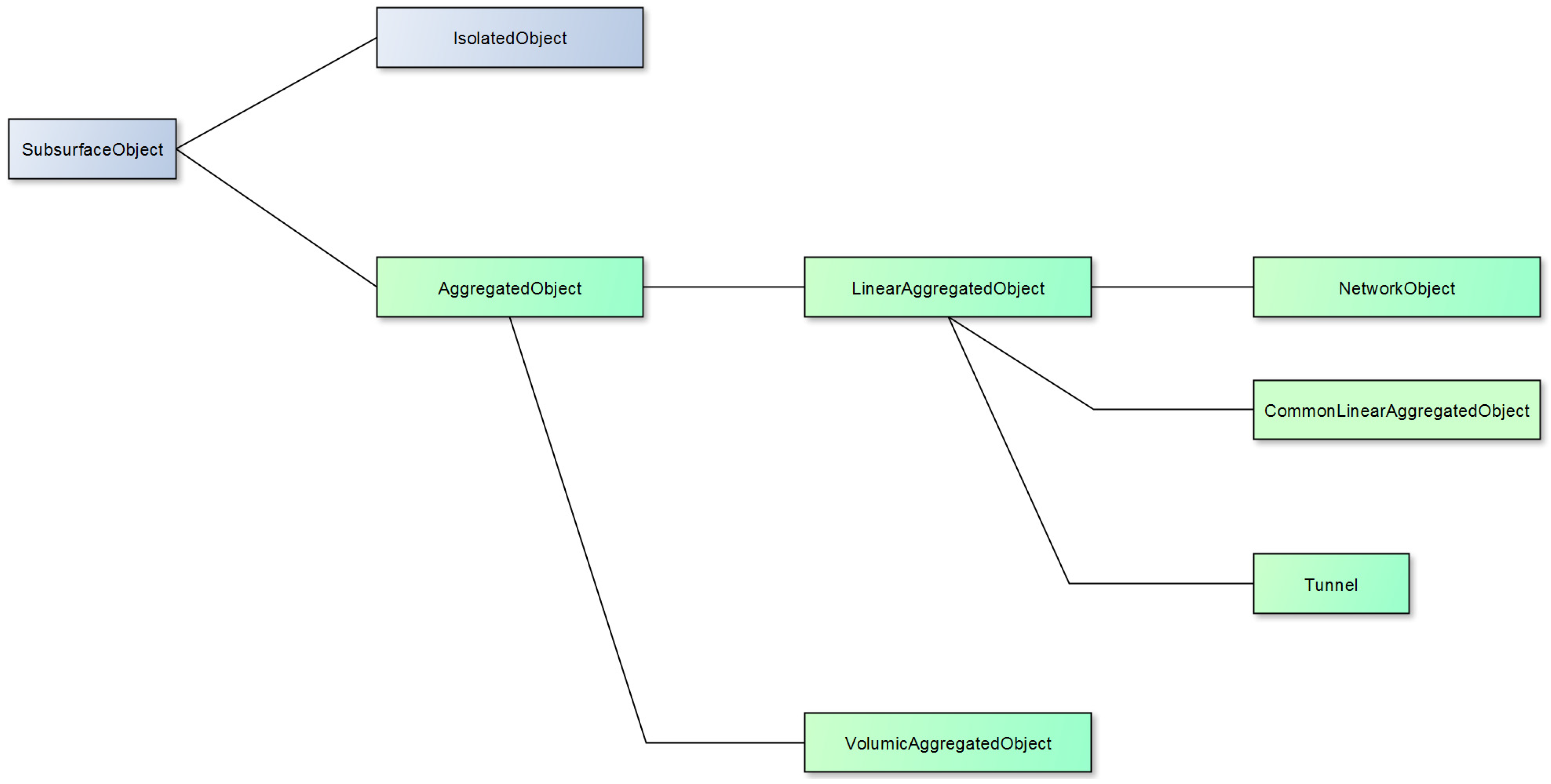
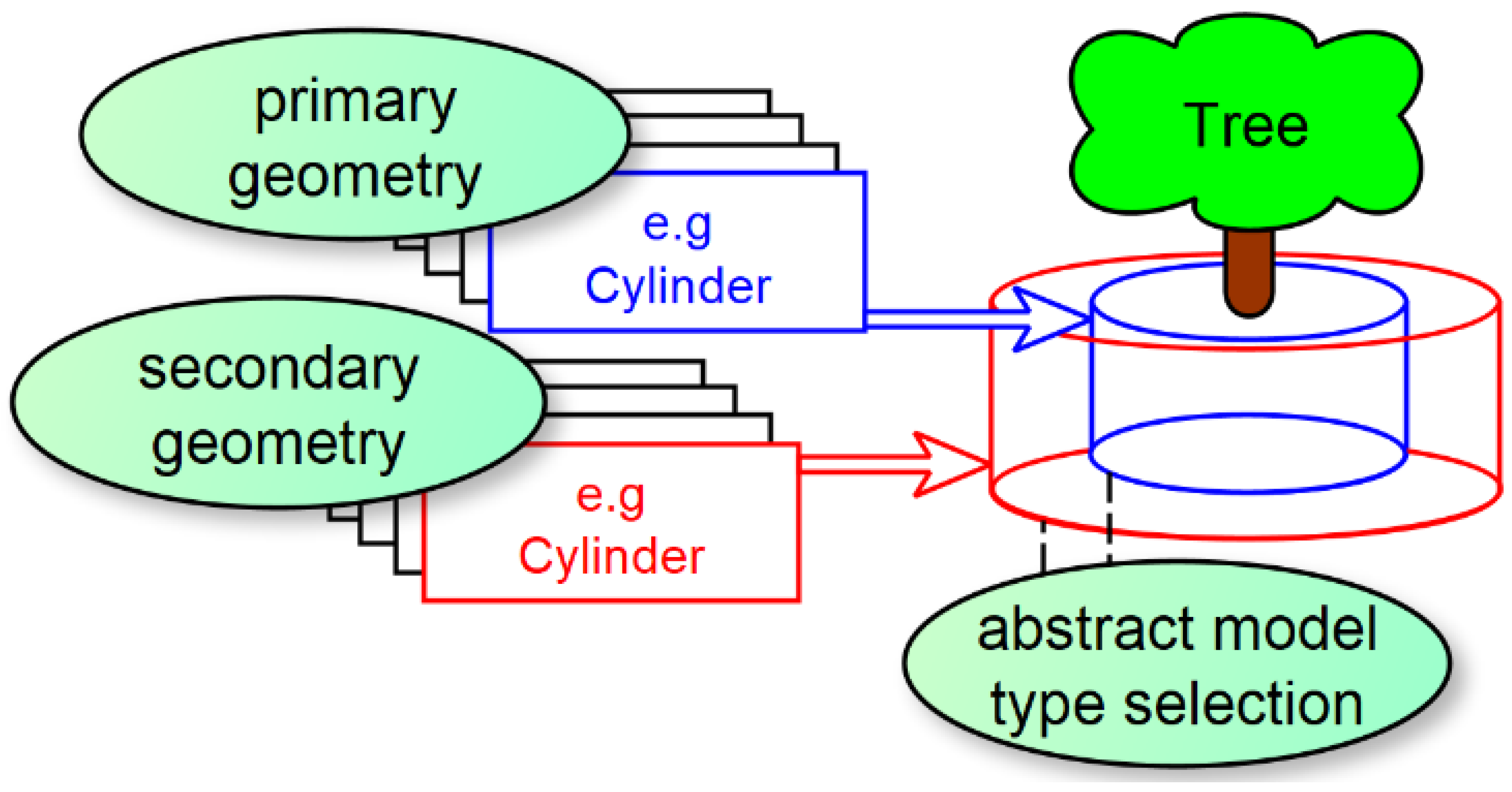
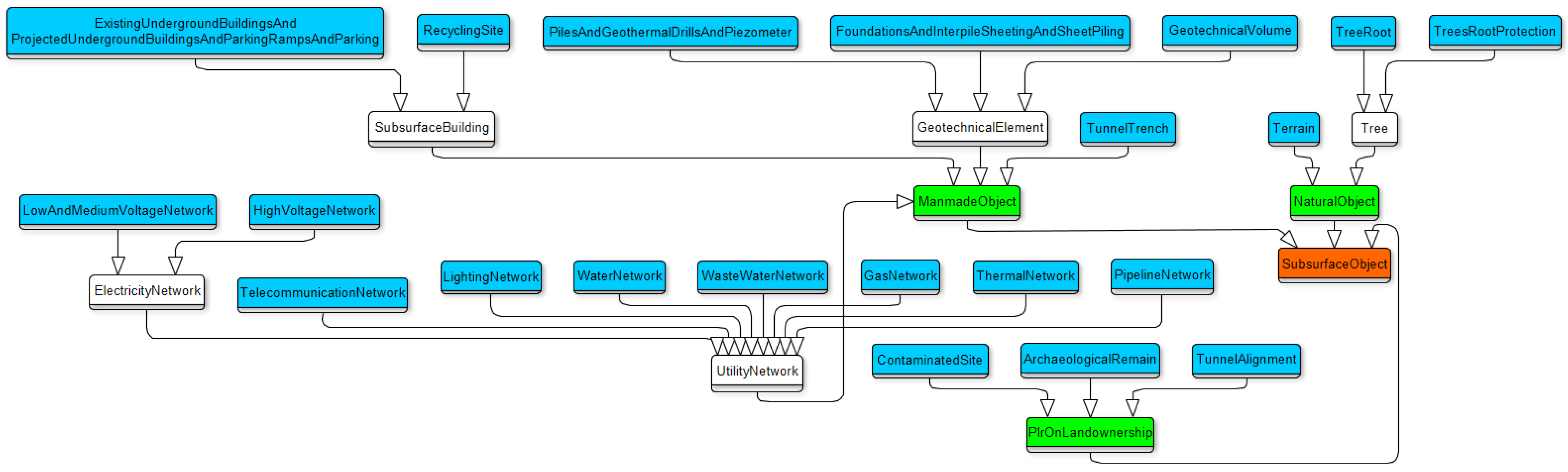
2.2.1. Abstract Model Type Selection Strategy
2.2.2. Model Completion Strategy
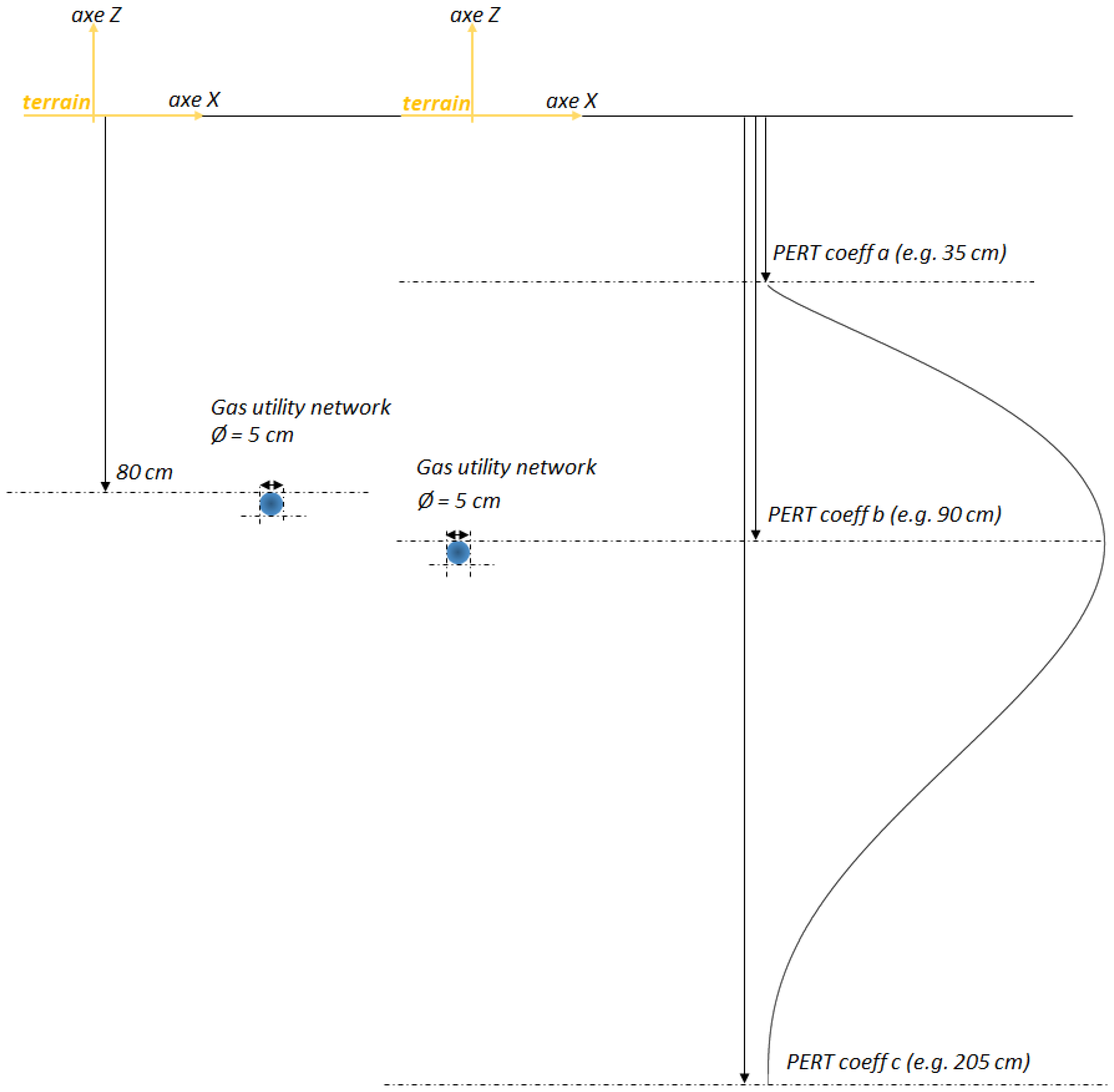
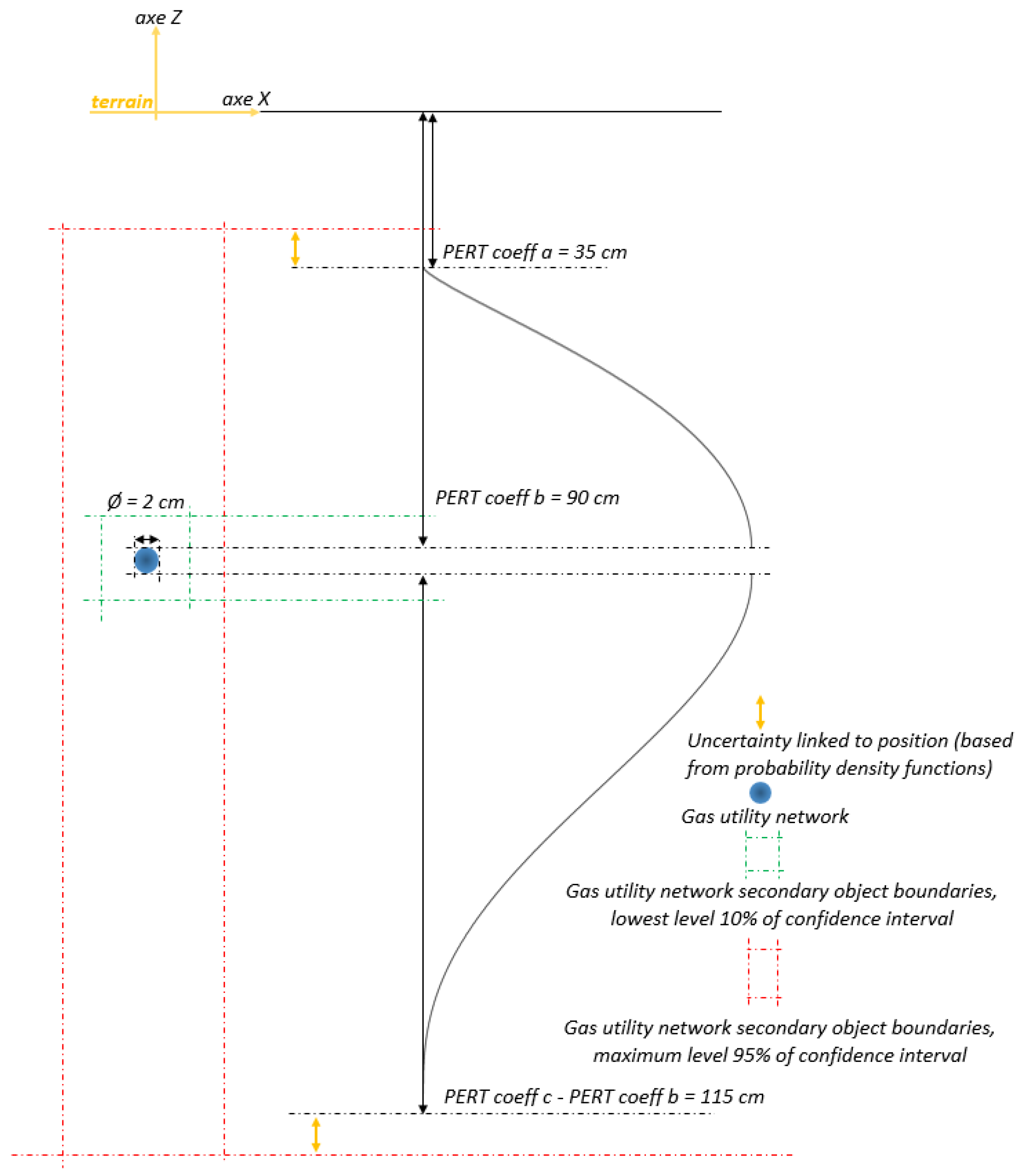
- Depth data of the same network type close to the one with missing data exists (Figure 9, right): in this case, a “Pert” distribution is established using available data and applied to obtain missing “z” attributes.
2.2.3. Bound Calibration Strategy
2.2.4. Object Integration Strategy
2.2.5. Recapitulative Table
3. Results/Validation
3.1. Methodology Generalization
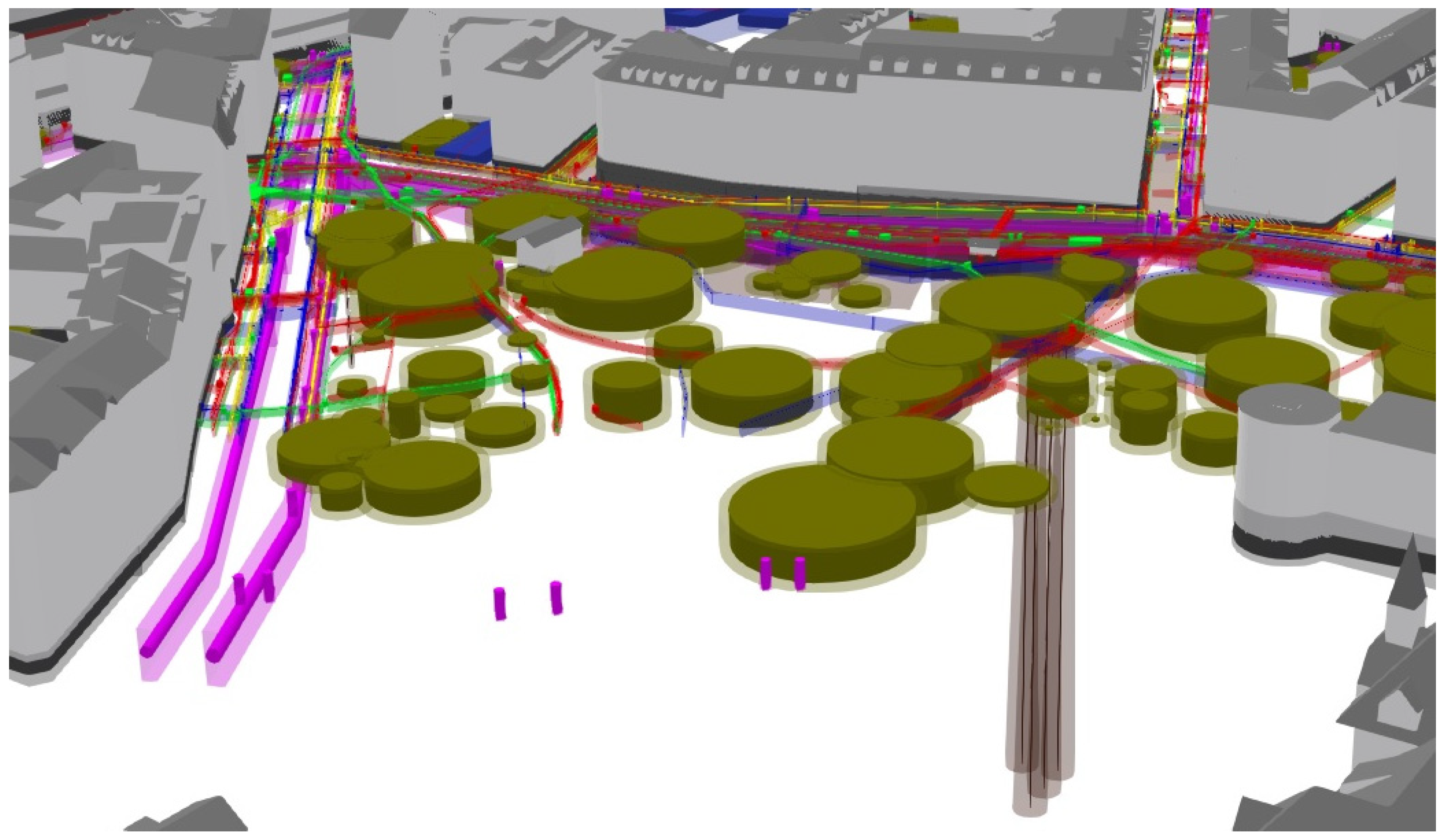
3.2. Visual Representation of Results
3.3. Qualification of Existing Spatial Information for the Examined Volumes
4. Discussion
5. Future Work
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

Appendix B

References and Notes
- Bobylev, N.; Sterling, R. Urban Underground Space: A Growing Imperative. Tunn. Undergr. Space Technol. 2016, 55, 1–4. [Google Scholar] [CrossRef]
- Admiraal, H.; Cornaro, A. Underground Space; Ice Publishing: Tonbridge, UK, 2017; ISBN 978-0-7277-6145-3. [Google Scholar]
- Bobylev, N. Transitions to a High Density Urban Underground Space. Procedia Eng. 2016, 165, 184–192. [Google Scholar] [CrossRef]
- Zargarian, R.; Hunt, D.V.L.; Braithwaite, P.; Bobylev, N.; Rogers, C.D.F. A New Sustainability Framework for Urban Underground Space. Proc. Inst. Civ. Eng. Eng. Sustain. 2018, 171, 238–253. [Google Scholar] [CrossRef] [Green Version]
- Underground. Institut du Paysage, d’Architecture, de la Construction et du Territoire (inPACT) 2019, Méthodes innovantes pour la construction-MIC. Available online: https://www.hesge.ch/hepia/recherche-developpement/projets-recherche/termine/underground (accessed on 5 April 2021).
- SIG. 2020. Available online: https://ww2.sig-ge.ch/ (accessed on 5 April 2021).
- Shan, Q.; Pennock, S.R.; Redfern, M.A. Investigation of GPR Configurations by Ray-Tracing Methods. In Proceedings of the 2006 IEEE Conference on Radar, Verona, NY, USA, 24–27 April 2006; IEEE: Syracuse, NY, USA, 2006; pp. 335–341. [Google Scholar]
- Biljecki, F.; Stoter, J.; Ledoux, H.; Zlatanova, S.; Çöltekin, A. Applications of 3D City Models: State of the Art Review. ISPRS Int. J. Geo-Inf. 2015, 4, 2842–2889. [Google Scholar] [CrossRef] [Green Version]
- Pauwels, P.; Zhang, S.; Lee, Y.-C. Semantic Web Technologies in AEC Industry: A Literature Overview. Autom. Constr. 2017, 73, 145–165. [Google Scholar] [CrossRef]
- Adouane, K.; Stouffs, R.; Janssen, P.; Domer, B. A Model-Based Approach to Convert a Building BIM-IFC Data Set Model into CityGML. J. Spat. Sci. 2019, 1–24. [Google Scholar] [CrossRef]
- Biljecki, F.; Lim, J.; Crawford, J.; Moraru, D.; Tauscher, H.; Konde, A.; Adouane, K.; Lawrence, S.; Janssen, P.; Stouffs, R. Extending CityGML for IFC-Sourced 3D City Models. Autom. Constr. 2021, 121, 103440. [Google Scholar] [CrossRef]
- Stouffs, R.; Tauscher, H.; Biljecki, F. Achieving Complete and Near-Lossless Conversion from IFC to CityGML. ISPRS Int. J. Geo-Inf. 2018, 7, 355. [Google Scholar] [CrossRef] [Green Version]
- Xu, X.; Cai, H. Semantic Approach to Compliance Checking of Underground Utilities. Autom. Constr. 2020, 109, 103006. [Google Scholar] [CrossRef]
- Zou, L. SPARQL. In Encyclopedia of Database Systems; Liu, L., Özsu, M.T., Eds.; Springer: New York, NY, USA, 2018; pp. 3554–3558. ISBN 978-1-4614-8266-6. [Google Scholar]
- Rook, M.; Biljecki, F.; Diakité, A.A. Towards automatic semantic labelling of 3D city models. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, IV-2/W1, 23–30. [Google Scholar] [CrossRef]
- Hwang, S.; Thill, J.-C. Modeling Localities with Fuzzy Sets and GIS. In Fuzzy Modeling with Spatial Information for Geographic Problems; Petry, F.E., Robinson, V.B., Cobb, M.A., Eds.; Springer: Berlin/Heidelberg, Germany, 2005; pp. 71–104. ISBN 978-3-540-23713-6. [Google Scholar]
- Morris, A.; Jankowski, P. Combining Fuzzy Sets and Databases in Multiple Criteria Spatial Decision Making. In Flexible Query Answering Systems; Larsen, H.L., Andreasen, T., Christiansen, H., Kacprzyk, J., Zadrożny, S., Eds.; Physica-Verlag HD: Berlin/Heidelberg, Germany, 2001; pp. 103–116. ISBN 978-3-7908-1347-0. [Google Scholar]
- Morris, A.; Jankowski, P. Spatial Decision Making Using Fuzzy GIS. In Fuzzy Modeling with Spatial Information for Geographic Problems; Petry, F.E., Robinson, V.B., Cobb, M.A., Eds.; Springer: Berlin/Heidelberg, Germany, 2005; pp. 275–298. ISBN 978-3-540-23713-6. [Google Scholar]
- Olde Scholtenhuis, L.L.; den Duijn, X.; Zlatanova, S. Representing Geographical Uncertainties of Utility Location Data in 3D. Autom. Constr. 2018, 96, 483–493. [Google Scholar] [CrossRef]
- Kutzner, T.; Hijazi, I.; Kolbe, T.H. Semantic Modelling of 3D Multi-Utility Networks for Urban Analyses and Simulations: The CityGML Utility Network ADE. Int. J. 3-D Inf. Model. 2018, 7, 1–34. [Google Scholar] [CrossRef] [Green Version]
- McKenzie, G.; Hegarty, M.; Barrett, T.; Goodchild, M. Assessing the Effectiveness of Different Visualizations for Judgments of Positional Uncertainty. Int. J. Geogr. Inf. Sci. 2016, 30, 221–239. [Google Scholar] [CrossRef]
- Wechsler, S.P.; Kroll, C.N. Quantifying DEM Uncertainty and Its Effect on Topographic Parameters. Photogramm. Eng. Remote Sens. 2006, 72, 1081–1090. [Google Scholar] [CrossRef] [Green Version]
- Sitg, L. Territoire Genevois à la Carte. Available online: https://ge.ch/sitg/ (accessed on 26 February 2020).
- Métral, C.; Daponte, V.; Caselli, A.; Di Marzo, G.; Falquet, G. Ontology-Based Rule Compliance Checking for Subsurface Objects. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2020, XLIV-4/W1-2020, 91–94. [Google Scholar] [CrossRef]
- Caselli, A.; Daponte, V.; Falquet, G.; Métral, C. A Rule Language Model for Subsurface Data Refinement in EG-ICE 2020 Workshop on Intelligent Computing in Engineering; Online Technische Universität Berlin: Berlin, Germany, 2020; pp. 443–452. [Google Scholar]
- Topomat. Switzerland Partner for Geographical Information Systems; Topomat: Founex, Switzerland, 2021. [Google Scholar]
- Pauwels, P.; Krijnen, T.; Terkaj, W.; Beetz, J. Enhancing the IfcOWL Ontology with an Alternative Representation for Geometric Data. Autom. Constr. 2017, 80, 77–94. [Google Scholar] [CrossRef] [Green Version]
- Métral, C.; Billen, R.; Cutting-Decelle, A.-F.; van Ruymbeke, M. Ontology-Based Approaches for Improving the Interoperability between 3D Urban Models. J. Inf. Technol. Constr. 2010, 15, 169–184. [Google Scholar]
- State of Geneva, Directive for Trees, Version 1.2. 2013.
- SGWA, Swiss Gas and Water Industry Association, Gas, G2. 2019.
- SGWA, Swiss Gas and Water Industry Association, Water, W4. 2013.
- SGWA, Swiss Gas and Water Industry Association, Thermal, F1. 2017.
- Bobylev, N. Underground Space as an Urban Indicator: Measuring Use of Subsurface. Tunn. Undergr. Space Technol. 2016, 55, 40–51. [Google Scholar] [CrossRef] [Green Version]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Attribute Name | Value | Attribute Name | Value |
|---|---|---|---|
| object ID | 1 | status of development | adult |
| original name | acer campestre | vitality | good |
| situation | garden | ground type | standard mix |
| type of plantation | group | surface type | shrub |
| number of truncs | 1 | life esperance | 2100 |
| form | Baliveau | type species | dicotylédone |
| GIS Layer | Taxonomy Element | Model Primary | Model Secondary | Complete | Bound | Integrate |
|---|---|---|---|---|---|---|
| SIPV_ICA_ARBRE_ISOLE | tree root | cylinder | cylinder | _radius _depth | _triangle | 90.0% |
| CAD_SS_GAZ_CONDUITE | natural gas network pipeline | Extruded polygon | Extruded polygon | _depth | _triangle _PERT | 93.0% |
| GOL_PIEZOMETRE | piezometer | truncated cone | truncated cone | _radius _depth | _triangle | 92.0% |
| Colour | Object | Colour | Object |
|---|---|---|---|
| olive | tree root | red | electricity network |
| blue | natural water network | green | telecommunication |
| magenta | wastewater | yellow | gas |
| light grey | geothermal drills | dark grey | subsurface buildings |
| Metric | PAV Sector | Cornavin Sector | Berlin [33] |
|---|---|---|---|
| surface, km2 | 0.31 | 0.32 | |
| primary volumes, m3 (000 000) | 0.49 | 0.42 | |
| UUS m3/m2 (in cm) | 156.8 | 133.7 | 128.0 |
| Area | Completeness Ratio | Refined Completeness Ratio | Gross Geometric Parameters |
|---|---|---|---|
| Cornavin | 80.22% | 72.33% | 387′282 |
| PAV | 79.36% | 73.76% | 147′468 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Adouane, K.; Boujon, F.; Domer, B. Digital Modelling of Underground Volumes, Including the Visualization of Confidence Levels for the Positioning of Subsurface Objects. Appl. Sci. 2021, 11, 3483. https://doi.org/10.3390/app11083483
Adouane K, Boujon F, Domer B. Digital Modelling of Underground Volumes, Including the Visualization of Confidence Levels for the Positioning of Subsurface Objects. Applied Sciences. 2021; 11(8):3483. https://doi.org/10.3390/app11083483
Chicago/Turabian StyleAdouane, Kamel, Fabian Boujon, and Bernd Domer. 2021. "Digital Modelling of Underground Volumes, Including the Visualization of Confidence Levels for the Positioning of Subsurface Objects" Applied Sciences 11, no. 8: 3483. https://doi.org/10.3390/app11083483
APA StyleAdouane, K., Boujon, F., & Domer, B. (2021). Digital Modelling of Underground Volumes, Including the Visualization of Confidence Levels for the Positioning of Subsurface Objects. Applied Sciences, 11(8), 3483. https://doi.org/10.3390/app11083483