
Modelling and Stability Analysis of Articulated Vehicles


Abstract
:1. Introduction
2. Modelling of Non-Linear Systems for Articulated Vehicles
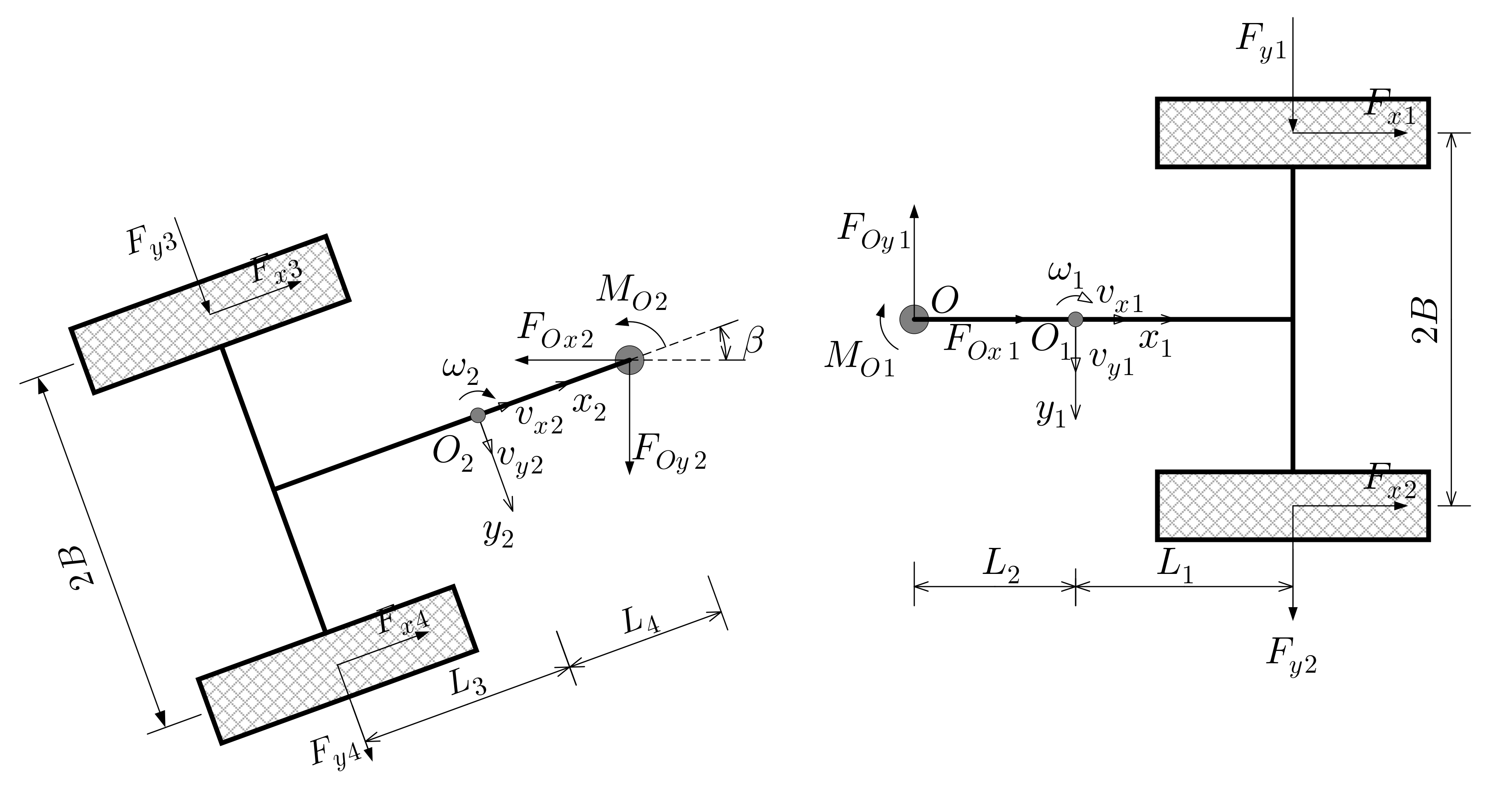
2.1. Vehicle Dynamics Analysis and Modelling
- (1)
- The front and rear body centres are located on the longitudinal central axis, and the vehicle is symmetrical with respect to the longitudinal central axis.
- (2)
- The influence of the tire camber angle and return torque on wheel dynamics are disregarded.
- (3)
- Air resistance is disregarded, and the road surface is flat and two-dimensional.
2.2. Tire Models
2.3. Hydraulic Steering System Model
2.4. Model Simulation
3. Stability Analysis Model for Articulated Vehicles
4. Analysis of the Stability Influencing Factors
4.1. Effects of the Centre of Mass Position
4.2. Effects of Torsional Stiffness
4.3. Effects of Mass
4.4. Effects of the Moment of Inertia
4.5. Effects of Tire Cornering Stiffness
4.6. Effects of the Hydraulic Cylinder Force Arm
5. Discussion
5.1. Conclusions
5.2. Limitation and Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Nomenclature
| c | Distance from the centre of mass of the whole vehicle to the rear axle |
| Cornering stiffness | |
| Longitudinal tire stiffness | |
| Longitudinal force of the steering mechanism on the front vehicle | |
| Longitudinal force of the steering mechanism on the rear vehicle | |
| Lateral force of the steering mechanism on the front vehicle | |
| Lateral force of the steering mechanism on the rear vehicle | |
| Longitudinal tire force (j = 1,2,3,4) | |
| Lateral tire force (j = 1,2,3,4) | |
| Vertical tire force (j = 1,2,3,4) | |
| Vehicle rotational inertia about the z-axis of the front vehicle | |
| Vehicle rotational inertia about the z-axis of the rear vehicle | |
| Distance from the centre of the front vehicle gravity to the front axles | |
| Distance from the articulated point to the centre of the front vehicle gravity | |
| Distance from the centre of the rear vehicle gravity to the rear axles | |
| Distance from the articulated point to the centre of the rear vehicle gravity | |
| Torque of the steering mechanism on the front vehicle | |
| Torque of the steering mechanism on the rear vehicle | |
| Mass of the front vehicle | |
| Mass of the rear vehicle | |
| Front vehicle coordinate system | |
| Rear vehicle coordinate system | |
| R | Distance between the hinge points of the hydraulic cylinder rod and articulated point |
| r | Distance between the hinge points of the hydraulic cylinder seat and articulated point |
| Longitudinal velocity of the front vehicle | |
| Longitudinal velocity of the rear vehicle | |
| Lateral velocity of the front vehicle | |
| Lateral velocity of the rear vehicle | |
| Angular velocity about the z-axis of the front vehicle | |
| Angular velocity about the z-axis of the rear vehicle | |
| Swing angle | |
| Initial angle of the hydraulic cylinder | |
| Friction coefficient |
References
- Azad, N.L.; Khajepour, A.; Mcphee, J. Robust state feedback stabilization of articulated steer vehicles. Veh. Syst. Dyn. 2007, 45, 249–275. [Google Scholar] [CrossRef]
- Li, X.; Chen, W.; Xu, Q. A Novel Dynamic Measurement System for Evaluating the Braking Coordination of Articulated Vehicles. J. Sens. 2016, 2016, 1–10. [Google Scholar] [CrossRef]
- Xu, T.; Ji, X.; Liu, Y.; Liu, Y. Differential Drive Based Yaw Stabilization Using MPC for Distributed-Drive Articulated Heavy Vehicle. IEEE Access 2020, 8, 104052–104062. [Google Scholar] [CrossRef]
- Azad, N.L.; Khajepour, A.; McPhee, J. Effects of locking differentials on the snaking behaviour of articulated steer vehicles. Int. J. Veh. Syst. Model. Test. 2007, 2, 101. [Google Scholar] [CrossRef]
- Crolla, D.A. The steering behaviour of articulated body steer vehicles. In Road Vehicle Handling, I Mech E Conference Publications 1983–1985. Sponsored by Automobile Division of the Institution of Mechanical Engineers under patronage of Federation Internationale des Societies d’Ingenieurs des Techniques de l’Automobile (FISITA) he; Number C123/83; MIRA: Nuneaton, Warwickshire, UK, 1983; pp. 139–146. [Google Scholar]
- Rehnberg, A.; Edren, J.; Eriksson, M.; Drugge, L.; Trigell, A.S. Scale model investigation of the snaking and folding stability of an articulated frame steer vehicle. Int. J. Veh. Syst. Model. Test. 2011, 6, 126. [Google Scholar] [CrossRef]
- Vlk, F. Lateral stability of articulated buses. Int. J. Veh. Des. 1988, 9, 35–51. [Google Scholar]
- Liu, Z.; Hu, K.; Chung, K. Nonlinear analysis of a closed-loop tractor-semitrailer vehicle system with time delay. Mech. Syst. Signal Process. 2016, 76–77, 696–711. [Google Scholar] [CrossRef]
- Scholl, R.D.; Klein, R.E. Stability Analysis of an Articulated Vehicle Steering System; SAE Technical Paper; SAE: Warrendale, PA, USA, 1971. [Google Scholar]
- Horton, D.N.L.; Crolla, D.A. Theoretical Analysis of the Steering Behaviour of Articulated Frame Steer Vehicles. Veh. Syst. Dyn. 1986, 15, 211–234. [Google Scholar] [CrossRef]
- Azad, N.L.; Khajepour, A.; McPhee, J. A survey of stability enhancement strategies for articulated steer vehicles. Int. J. Heavy Veh. Syst. 2009, 16, 26. [Google Scholar] [CrossRef]
- Gao, Y.; Shen, Y.; Yang, Y.; Zhang, W.; Güvenç, L. Modelling, verification and analysis of articulated steer vehicles and a new way to eliminate jack-knife and snaking behaviour. Int. J. Heavy Veh. Syst. 2019, 26, 375. [Google Scholar] [CrossRef]
- Gao, Y.; Shen, Y.; Xu, T.; Zhang, W.; Guvenc, L. Oscillatory Yaw Motion Control for Hydraulic Power Steering Articulated Vehicles Considering the Influence of Varying Bulk Modulus. IEEE Trans. Control. Syst. Technol. 2019, 27, 1284–1292. [Google Scholar] [CrossRef]
- Dudziński, P.; Skurjat, A. Directional dynamics problems of an articulated frame steer wheeled vehicles. J. Kones 2012, 19, 89–98. [Google Scholar] [CrossRef]
- Islam, M.M.; He, Y.; Zhu, S.; Wang, Q. A comparative study of multi-trailer articulated heavy-vehicle models. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2015, 229, 1200–1228. [Google Scholar] [CrossRef]
- Rehnberg, A.; Drugge, L.; Trigell, A.S. Snaking stability of articulated frame steer vehicles with axle suspension. Int. J. Heavy Veh. Syst. 2010, 17, 119. [Google Scholar] [CrossRef]
- Chai, M.; Rakheja, S.; Shangguan, W.B. Relative ride performance analysis of a torsio-elastic suspension applied to front, rear and both axles of an off-road vehicle. Int. J. Heavy Veh. Syst. 2019, 26, 765. [Google Scholar] [CrossRef]
- Lopatka, M.; Muszynski, T. Research of the snaking phenomenon to improve directional stability of remote controlled articulated wheel tool-carrier. In ISARC2003: The future site: Proceedings of the 20th International Symposium on Automation and Robotics in Construction, Eindhoven, The Netherlands, 21–24 September 2003; Technische Universiteit Eindhoven: Eindhoven, The Netherlands, 2003; p. 95. [Google Scholar]
- Gao, G.; Wang, J.; Ma, T.; Liu, W.; Lei, T. Multistage Estimators for the Distributed Drive Articulated Steering Vehicle. Math. Probl. Eng. 2020, 2020, 1–16. [Google Scholar]
- Li, X.; Wang, G.; Yao, Z.; Yang, Y. Research on lateral stability and rollover mechanism of articulated wheel loader. Math. Comput. Model. Dyn. Syst. 2014, 20, 248–263. [Google Scholar] [CrossRef]
- Pazooki, A.; Rakheja, S.; Cao, D. A three-dimensional model of an articulated frame-steer vehicle for coupled ride and handling dynamic analyses. Int. J. Veh. Perform. 2014, 1, 264. [Google Scholar] [CrossRef]
- Yin, Y.; Rakheja, S.; Yang, J.; Boileau, P. Effect of articulated frame steering on the transient yaw responses of the vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2018, 232, 384–399. [Google Scholar] [CrossRef]
- Pazooki, A.; Rakheja, S.; Cao, D. Kineto-dynamic directional response analysis of an articulated frame steer vehicle. Int. J. Veh. Des. 2014, 65, 1. [Google Scholar] [CrossRef]
- Yao, Z.; Wang, G.; Guo, R.; Li, X. Theory and experimental research on six-track steering vehicles. Veh. Syst. Dyn. 2013, 51, 218–235. [Google Scholar]
- Yang, C.; Xu, N.; Guo, K. Incorporating Inflation Pressure into UniTire Model for Pure Cornering; Technical Report; SAE Technical Paper; SAE: Warrendale, PA, USA, 2016. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| 6980 kg | reff | 0.875 m | |
| 9767 kg | |||
| 0.25 m | |||
| 1.35 m | R | 0.45 m | |
| 0.2 m | r | 0.55 m | |
| 1.459 m | 0.8 | ||
| B | 1.15 m | ||
| 32,977 | |||
| 13,228 | |||
| 117 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lei, T.; Wang, J.; Yao, Z. Modelling and Stability Analysis of Articulated Vehicles. Appl. Sci. 2021, 11, 3663. https://doi.org/10.3390/app11083663
Lei T, Wang J, Yao Z. Modelling and Stability Analysis of Articulated Vehicles. Applied Sciences. 2021; 11(8):3663. https://doi.org/10.3390/app11083663
Chicago/Turabian StyleLei, Tianlong, Jixin Wang, and Zongwei Yao. 2021. "Modelling and Stability Analysis of Articulated Vehicles" Applied Sciences 11, no. 8: 3663. https://doi.org/10.3390/app11083663
APA StyleLei, T., Wang, J., & Yao, Z. (2021). Modelling and Stability Analysis of Articulated Vehicles. Applied Sciences, 11(8), 3663. https://doi.org/10.3390/app11083663