
Development of a Novel Omnidirectional Treadmill-Based Locomotion Interface Device with Running Capability


Abstract
:1. Introduction
2. LI Device Design for Fast Motion
2.1. Actuation of Unit Segment Belt by Geared Transmission
2.2. Transmission Design for Omnidirectional Motion
2.3. Realization of Stable Omnidirectional Motion
2.4. Design of Actuation System for Desired Performance
2.5. Fabricating the ODT and Verifying the Performance
3. LI Control for Omnidirectional Running
3.1. Design of High-Level Controller
3.2. Performance of Curvature Radius
4. Pilot Study Results of Locomotion Interface Device with 2-Dimensional Running
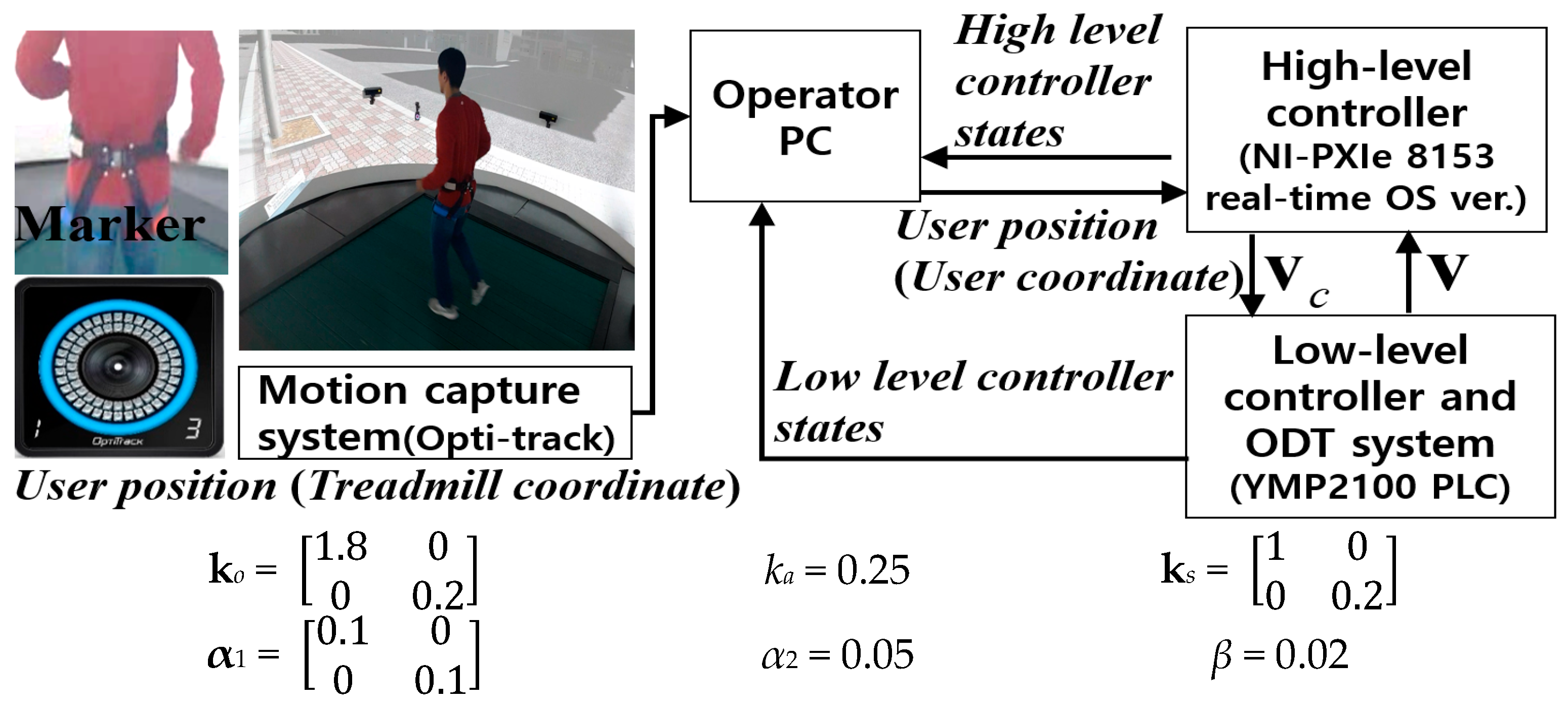
4.1. High-Level Controller Setup for Locomotion Interface
4.2. Running Performance of High-Level Controller
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hejrati, B.; Crandall, K.L.; Hollerbach, J.M.; Abbott, J.J. Kinesthetic force feedback and belt control for the treadport locomotion interface. IEEE Trans. Haptics 2015, 8, 176–187. [Google Scholar] [CrossRef] [PubMed]
- Lichtenstein, L.; Barabas, J.; Woods, R.L.; Peli, E. A feedback-controlled interface for treadmill locomotion in virtual environments. ACM Trans. Appl. Percept. (Tap) 2007, 4, 7-es. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Boboc, R.G.; Toma, M.I.; Moga, H.; Panfir, A.N.; Talabă, D. An Omnidirectional System for Navigation in Virtual Environments. In Proceedings of the Doctoral Conference on Computing, Electrical and Industrial Systems, Berlin, Germany, 15–17 April 2013; pp. 192–199. [Google Scholar]
- Schwaiger, M.C.; Thummel, T.; Ulbrich, H. A 2d-motion platform: The cybercarpet. In Proceedings of the IEEE Second Joint EuroHaptics Conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems (WHC’07), Tsukuba, Japan, 22–24 March 2007; pp. 415–420. [Google Scholar]
- Fernandes, K.J.; Raja, V.; Eyre, J. Cybersphere: The fully immersive spherical projection system. Commun. ACM 2003, 46, 141–146. [Google Scholar] [CrossRef]
- Iwata, H.; Yano, H.; Fukushima, H.; Noma, H. CirculaFloor locomotion interface. IEEE Comput. Graph. Appl. 2005, 25, 64–67. [Google Scholar] [CrossRef] [PubMed]
- Patel, K.K.; Vij, S.K. Locomotion interface to the virtual environment to acquire spatial knowledge. In Proceedings of the TENCON 2008 IEEE Region 10 Conference, Hyderabad, India, 19–21 November 2008; pp. 1–4. [Google Scholar]
- Yoon, J.; Ryu, J. A novel locomotion interface with two 6-dof parallel manipulators that allows human walking on various virtual terrains. Int. J. Robot. Res. (IJRR) 2006, 25, 689–708. [Google Scholar] [CrossRef]
- Yoon, J.; Park, J.; Ryu, J. A Planar Symmetric Walking Cancellation Algorithm for a Foot—Platform Locomotion Interface. Int. J. Robot. Res. (IJRR) 2010, 29, 39–59. [Google Scholar] [CrossRef]
- Yoon, J.; Novandy, B.; Yoon, C.H.; Park, K.J. A 6-DOF gait rehabilitation robot with upper and lower limb connections that allows walking velocity updates on various terrains. IEEE/ASME Trans. Mechatron. (TMECH) 2010, 15, 201–215. [Google Scholar] [CrossRef]
- Darken, R.P.; Cockayne, W.R.; Carmein, D. The omni-directional treadmill: A locomotion device for virtual worlds. In Proceedings of the UIST 97, Banff, AB, Canada, 14–17 October 1997; pp. 213–221. [Google Scholar]
- Schwaiger, M.; Thuimmel, T.; Ulbrich, H. Cyberwalk: An advanced prototype of a belt array platform. In Proceedings of the IEEE International Workshop on Haptic, Audio and Visual Environments and Games, Ottawa, ON, Canada, 12–14 October 2007; pp. 50–55. [Google Scholar]
- Crowell, H.P., III; Faughn, J.A.; Tran, P.K.; Wiley, P.W. Improvements in the Omni-Directional Treadmill: Summary Report and Recommendations for Future Development; Army Research Lab: Aberdeen Proving Ground, MD, USA, 2006. [Google Scholar]
- Iwata, H. Walking about virtual environments on an infinite floor. In Proceedings of the IEEE Virtual Reality (Cat. No. 99CB36316), Houston, TX, USA, 13–17 March 1999; pp. 286–293. [Google Scholar]
- Boynton, A.C.; Kehring, K.L.; White, T.L. Biomechanical and Physiological Validation of the Omni-Directional Treadmill Upgrade as a Mobility Platform for Immersive Environments; Army Research Lab: Aberdeen Proving Ground, MD, USA, 2011. [Google Scholar]
- Burger, G. Single Belt Omni Directional Treadmill. U.S. Patent No. 8,790,222, 29 July 2014. [Google Scholar]
- Yao, W.S.; Yang, F.Y.; Tsai, M.C. Modeling and control of twin parallel-axis linear servo mechanisms for high-speed machine tools. Int. J. Autom. Smart Technol. 2011, 1, 77–85. [Google Scholar] [CrossRef] [Green Version]
- Fischer, N.; Hughes, D.; Walters, P.; Schwartz, E.M.; Dixon, W.E. Nonlinear RISE-based control of an autonomous underwater vehicle. IEEE Trans. Robot. (TRO) 2014, 30, 845–852. [Google Scholar] [CrossRef] [Green Version]
- Pyo, S.H.; Lee, H.S.; Phu, B.M.; Park, S.J.; Yoon, J.W. Development of a Fast-Omnidirectional Treadmill (F-ODT) for Immersive Locomotion Interface. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 760–766. [Google Scholar]
- Tadakuma, K.; Tadakuma, R.; Ioka, K.; Kudo, T.; Takagi, M.; Tsumaki, Y.; Higashimori, M.; Kaneko, M. Study on the omnidirectional driving gear mechanism. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Saint Paul, MN, USA, 14–18 May 2012; pp. 3531–3532. [Google Scholar]
- Lee, H.; Pyo, S.; Park, S.; Yoon, J. Design of the omni directional treadmill based on an omni-pulley mechanism. In Proceedings of the IEEE 13th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Xi’an, China, 19–23 August 2016; pp. 889–894. [Google Scholar]
- Asl, H.J.; Pyo, S.H.; Yoon, J. An Intelligent Control Scheme to Facilitate Abrupt Stopping on Self-Adjustable Treadmills. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 1639–1644. [Google Scholar]
- Zhao, D.Z.; Li, C.W.; Ren, J. Speed synchronization of multiple induction motors with adjacent cross-coupling control. IET Control Theory Appl. 2010, 4, 119–128. [Google Scholar] [CrossRef]
- Huo, F.; Poo, A.N. Improving contouring accuracy by using generalized cross-coupled control. Int. J. Mach. Tools Manuf. 2012, 63, 49–57. [Google Scholar] [CrossRef]
- Nordin, M.; Bodin, P.; Gutman, P.O. New Models and Identification Methods for Backlash and Gear Play; Adaptive Control of Nonsmooth Dynamic Systems: London, UK, 2001; pp. 1–30. [Google Scholar]
- Yoon, J.; Park, H.S.; Damiano, D.L. A novel walking speed estimation scheme and its application to treadmill control for gait rehabilitation. J. Neuroeng. Rehabil. 2012, 9, 1–13. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Souman, J.L.; Giordano, P.R.; Frissen, I.; De Luca, A.; Ernst, M.O. Making virtual walking real: Perceptual evaluation of a new treadmill control algorithm. ACM Trans. Appl. Percept. (TAP) 2010, 7, 1–14. [Google Scholar] [CrossRef]
- De Luca, A.; Mattone, R.; Giordano, P.R. Acceleration-level control of the CyberCarpet. In Proceedings of the IEEE International Conference on Robotics and Automation, Rome, Italy, 10–14 April 2007; pp. 2330–2335. [Google Scholar]
- Xian, B.; Dawson, D.M.; de Queiroz, M.S.; Chen, J. A continuous asymptotic tracking control strategy for uncertain nonlinear systems. IEEE Trans. Autom. Control. 2004, 49, 1206–1211. [Google Scholar] [CrossRef]
- Souman, J.L.; Giordano, P.R.; Schwaiger, M.; Frissen, I.; Thümmel, T.; Ulbrich, H.; De Luca, A.; Bülthoff, H.H.; Ernst, M.O. CyberWalk: Enabling unconstrained omnidirectional walking through virtual environments. ACM Trans. Appl. Percept. (TAP) 2011, 8, 1–22. [Google Scholar] [CrossRef]
- Orendurff, M.S.; Segal, A.D.; Klute, G.K.; Berge, J.S.; Rohr, E.S.; Kadel, N.J. The effect of walking speed on center of mass displacement. J. Rehabil. Res. Dev. 2004, 41, 829–834. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kim, J.; Park, H.S.; Damiano, D.L. An interactive treadmill under a novel control scheme for simulating overground walking by reducing anomalous force. IEEE/ASME Trans. Mechatron. 2014, 20, 1491–1496. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Specifications | |
|---|---|---|
| System frame dimensions | 2780 mm × 3310 mm × 640 mm | |
| Active surface area | 2.5 m × 2.5 m | |
| Unit segment dimensions | 100 mm × 2577 mm × 70.5 mm | |
| Unit segment weight | 9 kg | |
| Number of segments | 64 units | |
| Number of active segments | 27 units | |
| Number of GOPS in 1 GOP shaft | 54 units per 1 GOP shaft | |
| Chain and timing belt | X-axis drive chain | Y-axis segment belt |
| Pitch | 18.875 mm | 10 mm |
| Width | 9.4 mm | 96 mm |
| Actuation part specification | Sprocket | GOP shaft |
| Pitch diameter | 396.375 mm | 114.59 mm |
| The number of teeth | 21 | 36 |
| Axis | Required Pulley Torque | Required Pulley Angular Velocity | Power |
|---|---|---|---|
| X | 1768 Nm (max.) | 15.63 rad/s | 28 kW (peak) |
| 563 Nm (avg.) | 8.8 kW (nominal) | ||
| Y | 148.5 Nm (max.) | 52.35 rad/s | 8 kW (peak) |
| 81 Nm (avg.) | 4.2 kW (nominal) |
| Y-axis Drive Mechanism | Active Surface Area/Thickness | Actuator Specification | Max. vel. (km/h) | Max. acc. (m/s2) | ||
|---|---|---|---|---|---|---|
| US army ODT 1 | Frame stationery motor with omni-wheel | 1.3 × 1.3 m2 /0.46 m | X-axis | 4 kW (1 EA) | 7.2 | Under 1 |
| Y-axis | 4 kW (1 EA) | |||||
| Cyber Walk | Segment attached motor | 6.5 × 6.5 m2 /1.5 m | X-axis | 40 kW (4 EA) | 7.2 | 0.5 |
| Y-axis | 37.5 kW (25 EA) | 10.8 | 0.75 | |||
| Torus treadmill | Segment attached motor | 1 × 1 m2 /0.5 m | X-axis | 200 W (1 EA) | 4.3 | 1 |
| Y-axis | 960 W (12 EA) | 4.3 | 0.8 | |||
| Proposed ODT | Frame stationery motor with GOPS 2 | 2.5 × 2.5 m2 /0.64 m | X-axis | 8.8 kW (2 EA) | 10.9 | 3 |
| Y-axis | 5.8 kW (2 EA) | 10.9 | 3 | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pyo, S.; Lee, H.; Yoon, J. Development of a Novel Omnidirectional Treadmill-Based Locomotion Interface Device with Running Capability. Appl. Sci. 2021, 11, 4223. https://doi.org/10.3390/app11094223
Pyo S, Lee H, Yoon J. Development of a Novel Omnidirectional Treadmill-Based Locomotion Interface Device with Running Capability. Applied Sciences. 2021; 11(9):4223. https://doi.org/10.3390/app11094223
Chicago/Turabian StylePyo, Sanghun, Hosu Lee, and Jungwon Yoon. 2021. "Development of a Novel Omnidirectional Treadmill-Based Locomotion Interface Device with Running Capability" Applied Sciences 11, no. 9: 4223. https://doi.org/10.3390/app11094223
APA StylePyo, S., Lee, H., & Yoon, J. (2021). Development of a Novel Omnidirectional Treadmill-Based Locomotion Interface Device with Running Capability. Applied Sciences, 11(9), 4223. https://doi.org/10.3390/app11094223